基于超寬帶TSOA定位原理的掘進機定位誤差分析
2019-06-22 09:04:42符世琛
煤炭工程 2019年6期
劉 超,符世琛,成 龍,劉 丹,沈 陽,吳 淼
(中國礦業大學(北京) 機電與信息工程學院,北京 100083)
隨著我國經濟發展方式的轉變,煤炭行業也由粗放的生產方式向集約化、精細化方向轉型,智能化開采成為煤炭安全高效開采的發展方向與必然趨勢[1]。掘進機的位姿檢測是當前井下無人化采掘技術的核心問題,針對掘進機的位姿檢測方法,目前主要有基于激光的位姿檢測[2]、基于iGPS的位姿檢測[3]、基于空間交匯的位姿檢測[4]、基于慣性測量技術的位姿檢測[5]和基于超寬帶的位姿檢測[6]。
本文基于超寬帶的掘進機位姿檢測,利用TSOA定位原理,采用間接法,對定位誤差進行了仿真分析。
1 超寬帶定位技術和TSOA定位原理
1.1 超寬帶定位技術
超寬帶(UWB)定位技術[7]是一種無載波通信技術。其頻帶很寬,具有恒定的波達時間分辨率,可解算出準確的測距信息,它具有抗干擾能力強、安全性好、穿透能力強、傳輸速率高、系統容量大及功耗低等優點。
超寬帶定位[8]按照定位應用場合的不同可分為視距算法定位和非視距算法定位,在礦井中,掘進機與基站一般存在視距傳播;按照定位參量的不同可以分為測距定位(TOA)、測距差定位(TDOA)、測距和定位(TSOA)、測角定位(AOA)和混合定位,本文采用測距和定位原理。
1.2 TSOA定位原理
測距和定位原理是基于波達時間和,通過信號同步網絡實現在時域、頻域、空域上的嚴格同步,各站將測得的目標數據通過數據傳遞網進行傳遞,發射站只發射信號,接收站通過接收待測目標反射的發射站信號,測量從發射站到待測目標以及待測目標到接收站的距離和。當測量沒有誤差時,待測目標一定位于以發射站和接收站為焦點,到發射站和接收站的距離和為定值的橢圓上。在空間中,多個橢球的相交區域即為待測目標的位置。定位原理如圖1所示,其中A、B、C、D為定位基站,E為掘進機機身定位點。
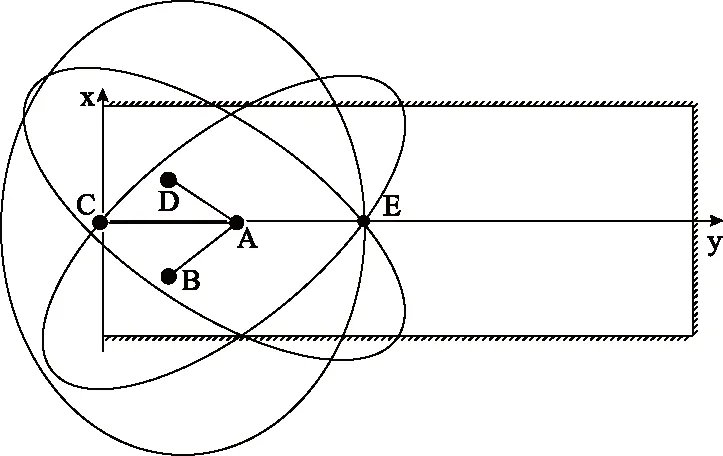
圖1 TSOA定位原理示意圖
1.3 定位點坐標
設定4個定位基站A、B、C、D,基站A為發射站,只發射信號,其位置坐標為(XA,YA,ZA);基站B、C、D為接收站,只接收信號,其基站群位置坐標為(Xi,Yi,Zi)(i=B,C,D)。接收站通過接收目標反射的發射站信號,測量從發射站到目標以及目標到接收站的距離和,Pi=ri+rA。掘進機的機身節點E的位置坐標為(XE,YE,ZE);第i個接收站獲得的觀測量為Pi,解算出三個橢圓的交點,得出目標點的坐標值,則定位點E的位置坐標的觀測方程組為:
對方程組(1)采用間接法,通過移項,平方,整理化簡,可得:
式中:
將式(2)轉化為矩陣形式:
AX=b
(3)
式中:
使rank(A)=3,由此可得最小二乘解為:
X=(ATA)-1AT
(4)
2 定位點分布
為了探究定位點的分布,設定基站坐標A(0,10,0)、B(2,5,0)、C(-2,5,0)、D(2,0,5),E點為機身定位點,坐標為(0,n,0)。方案采用美國Time domain公司生產的P440超寬帶測距模塊[9],寬帶為3.1~5.3GHz,中心頻率為4.3GHz。經過課題組的大量實驗驗證[10],該模塊在100m的室內測距誤差基本都小于2cm,測距誤差一般服從正態分布,因此將均值為0、標準差為0.02m的測距誤差帶入間接法,得到定位點的三維坐標,并在MATLAB中進行1000次定位仿真,將仿真結果所得到的均值作為最終定位點的坐標值,n分別取為15和90,得到定位點在空間的仿真分布如圖2所示。
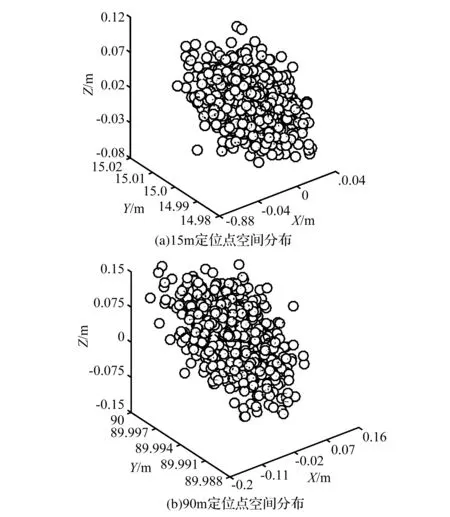
圖2 定位點空間仿真分布
由圖2分析可知,在15m和90m處,定位點在空間的分布呈不規則橢球形,三軸的精度都可以達到厘米級,不存在誤差非線性過快增長的情況,Y軸的誤差小于X軸和Z軸。
3 定位誤差
3.1 定位點均方根誤差
為了研究定位點的誤差,評價該算法的定位性能,采用均方根誤差作為評價指標。選取第2節基站坐標值,開展定位點從10~100m的定位仿真實驗。定位點E的坐標值為(0,n,0),定位點從10m處開始,每隔1m移動一次,一直移動到100m,可以得到定位點均方根誤差隨定位距離的變化曲線,如圖3所示。

圖3 定位點均方根誤差隨定位距離的變化曲線
由圖3分析可知,隨著定位距離的增大,定位點的均方根誤差也隨著增大。在10~100m之間,均方根誤差控制在4.5cm以內。
3.2 三軸均方根誤差
為了研究三軸的誤差,選取與3.1節相同的基站和定位點的坐標值,可以得到三軸均方根誤差隨定位距離的變化曲線,如圖4所示。

圖4 三軸均方根誤差隨定位距離的變化曲線
由圖4分析可知,隨著定位距離的增大,三軸的均方根誤差也隨著增大。Y軸的均方根誤差最小,控制5mm以內,X軸和Z軸的均方根誤差無較大差異,在4.5cm以內。
4 結 語
1)根據TSOA定位原理采用間接法計算出機身的坐標,定位點在空間的分布呈不規則球形,Y軸的誤差小于X軸和Z軸。
2)在10~100m的范圍內,隨著定位點距離的增大,定位點的均方根誤差也隨著增大,均方根誤差可控制在4.5cm以內。
3)三軸的方均根誤差在10~100m的范圍內,隨著測量距離的增大而增大。其中Y軸的均方根誤差最小,X軸和Y軸持平,誤差控制在4.5cm以內。
