機器人輔助經(jīng)顱磁刺激線圈定位的導航路徑規(guī)劃與避障算法研究
2019-06-19 03:17:48靳靜娜劉志朋
醫(yī)療衛(wèi)生裝備 2019年6期
關(guān)鍵詞:系統(tǒng)
王 賀,王 欣,靳靜娜,李 穎,劉志朋,殷 濤,2*
(1.中國醫(yī)學科學院北京協(xié)和醫(yī)學院生物醫(yī)學工程研究所,天津 300192;2.中國醫(yī)學科學院神經(jīng)科學中心,北京 100730)
0 引言
經(jīng)顱磁刺激(transcranial magnetic stimulation,TMS)是一種無痛的非侵入性的大腦神經(jīng)刺激方法[1-3],近30 a來,已被應用于臨床和科研領(lǐng)域。大量研究表明TMS對抑郁癥、腦卒中、疼痛等都具有較好的治療效果[4-9]。目前,TMS已經(jīng)在美國和加拿大取得了食品藥品監(jiān)督管理局(Food and Drug Administration,F(xiàn)DA)認證。但是,因為TMS實驗操作復雜且治療效果存在較大的個體差異,目前TMS還未被廣泛接受[10-11]。
在實施TMS的過程中,刺激線圈被放置于被試頭部刺激區(qū)域,基于電磁感應原理,通過刺激線圈產(chǎn)生的脈沖磁場在大腦皮層產(chǎn)生感應電流,進而刺激大腦皮層神經(jīng)。因此磁刺激線圈的定位精度是影響TMS治療效果個體差異的重要原因之一[12-14]。最初,在沒有導航系統(tǒng)的輔助下,實驗人員通過手持磁刺激線圈的方法無法將刺激線圈精確地定位于被試的頭部刺激區(qū)域[10-12]。為了解決該問題,目前國際上已經(jīng)開發(fā)出了神經(jīng)定位導航技術(shù),用于更加穩(wěn)定、準確地定位刺激線圈。基于被試頭部的三維影像,利用光學跟蹤設(shè)備,神經(jīng)導航技術(shù)可以在重建的大腦三維模型上實時地顯示TMS線圈的實際刺激位置[13-14]。雖然神經(jīng)導航技術(shù)可以提高刺激線圈的定位精度,但是刺激線圈的質(zhì)量通常超過2 kg(如圖1所示),實驗操作人員難以在每個治療過程中手持磁刺激線圈超過30 min。機器人輔助TMS線圈定位的方法可有效解決上述問題,對于TMS的臨床應用具有重要意義,已成為近年來的研究熱點。
安全性是機器人輔助TMS在臨床上應用的最重要的前提。目前,國際上已有輔助TMS線圈定位的機器人實驗系統(tǒng)的報道,而且相關(guān)文獻已經(jīng)證明機器人輔助TMS線圈定位的方法可以顯著提高刺激精度[15-18]。2011年Richter等[17]基于工業(yè)6軸機器人(Adept Viper s850)設(shè)計了TMS機器人系統(tǒng),然而,由于該系統(tǒng)配備了工業(yè)機器人普遍使用的用于高速運動的控制器,其安全性備受質(zhì)疑。2012年Zorn等[18]基于結(jié)構(gòu)運動方案設(shè)計了7軸TMS專用機器人系統(tǒng)。以上2種機器人系統(tǒng)的架構(gòu)和實驗流程基本相同,均為實驗操作人員將刺激線圈安裝在機器人的末端執(zhí)行器上,使用NDI公司生產(chǎn)的雙目相機實現(xiàn)線圈導航。完成系統(tǒng)校準后,機器人將刺激線圈非常精確地直接定位至選定的目標刺激區(qū)域[19-22]。
基于工業(yè)機器人搭建安全可靠的TMS機器人系統(tǒng),必須實現(xiàn)以下2個條件的精準控制:(1)精確控制刺激線圈和被試頭部之間的接觸力。(2)基于避障算法精確地控制刺激線圈的行進路徑,確保刺激靶點在定位和切換的過程中線圈和被試頭部不會產(chǎn)生碰撞。目前,已經(jīng)有實現(xiàn)刺激線圈和被試頭部之間接觸力控制的文獻報道[17-18]。本文嘗試使用機器人路徑規(guī)劃的方法精確地控制刺激線圈的行進路徑,并給出了相應的避障算法,以提高機器人輔助TMS系統(tǒng)的安全性。
1 TMS機器人系統(tǒng)的工作流程
圖1展示了機器人輔助TMS路徑規(guī)劃的工作流程,具體如下:(1)獲取被試的MRI圖像以重建被試大腦和頭部的三維模型,通過綁帶將光學定位剛體(rigid body 8700339,NDI)固定于被試頭部,通過NDI相機實時測量頭部位置和方向。(2)將解剖學標記放在被試頭部的三維模型上以完成被試注冊。(3)通過固定裝置將刺激線圈固定于機器人法蘭末端,獲得機器人的基準坐標系到線圈的工具坐標系的坐標變換關(guān)系。(4)將NDI固定在刺激線圈上完成線圈校準。(5)獲取機器人的基準坐標系到NDI雙目相機的坐標變換關(guān)系。實驗操作人員使用TMS機器人系統(tǒng)設(shè)定治療計劃,包括刺激靶點的位置和順序以及每個目標的刺激時間。(6)基于本文提出的算法規(guī)劃刺激線圈的行進路徑和路徑特征點的坐標,機器人自動引導刺激線圈依次定位設(shè)定的刺激靶點實施治療計劃。
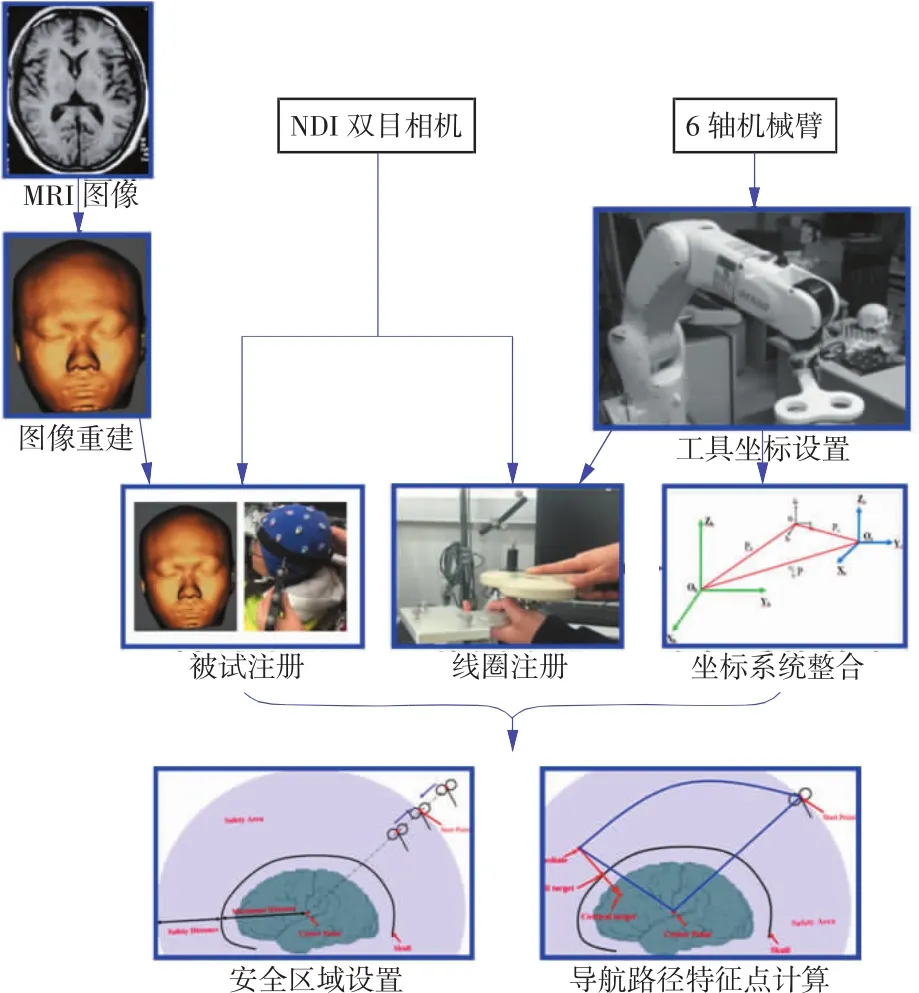
圖1 機器人輔助TMS系統(tǒng)的工作流程
2 TMS機器人系統(tǒng)的組成架構(gòu)
2.1 硬件方面
選用英國Magstim公司生產(chǎn)的經(jīng)顱磁刺激儀(Rapid2,Magstim)和標準70 mm 8字形刺激線圈(P/N3191-00,Magstim)設(shè)計TMS機器人系統(tǒng)。同時選擇最大有效載荷為4 kg的6自由度工業(yè)機器人(VS-060,Denso)以固定刺激線圈。基于雙目視覺光學精準導航定位相機(Polaris Spectra,NDI)和無源近紅外定位工具套件(8800837,NDI)定位被試的頭部和刺激線圈。
2.2 軟件方面
VS-060由專用機器人控制器(RC8,Denso)控制,使用以太網(wǎng)連接RC8和計算機。基于網(wǎng)絡(luò)的開放資源接口(ORIN2)完成RC8的控制程序設(shè)計,ORIN2提供各種生產(chǎn)廠家的自動化設(shè)備和數(shù)據(jù)庫的標準接口。使用USB2.0連接定位相機和計算機。NDI提供了一系列應用程序開發(fā)接口(application program interface,API)命令,以將相關(guān)功能集成到TMS機器人的軟件系統(tǒng)。
2.3 醫(yī)學方面
TMS治療過程不需要滅菌。刺激磁場的強度大約在100 ms內(nèi)達到1~2 T,因此產(chǎn)生的電場強度峰值高達600 V/m。線圈集成到機器人系統(tǒng)后還需要進行實驗以評估電場強度對機器人系統(tǒng)的影響。因此,應當避免在距離線圈中心60 mm距離內(nèi)出現(xiàn)鐵磁部件。
3 TMS機器人的坐標系統(tǒng)
3.1 工具坐標設(shè)置
如圖2(a)所示,6軸機器人VS-060的基礎(chǔ)坐標系為三維笛卡爾坐標系,原點位于機器人“基座”中心。機器人“基座”位于機器人第一軸的底部,基礎(chǔ)坐標系的3個坐標軸分別定義為Xb、Yb和Zb。如圖2(b)所示,機器人末端的工具安裝面定義為機器人法蘭,原點位于法蘭中心的三維笛卡爾坐標定義為機械界面坐標系(Xm,Ym,Zm)。
基于機械界面坐標系和工具坐標系的偏移和旋轉(zhuǎn)量定義工具坐標系。圖2(c)表示8字形線圈的工具坐標系(Xcoil,Ycoil,Zcoil)的示意圖,工具坐標系與機械界面坐標的方向相同,因此旋轉(zhuǎn)分量為(0°,0°,0°)。8 字形線圈通過圖 2(d)所示的工件固定在機器人法蘭上,因此8字形線圈工具坐標系(Xcoil,Ycoil,Zcoil)與機械界面坐標系(Xm,Ym,Zm)的偏移距離分別為a-b、0和c+h/2,其中h是線圈的厚度。
“位姿數(shù)據(jù)”代表8字形線圈的工具坐標系在機器人基礎(chǔ)坐標系下的當前位置和姿態(tài)。一組X、Y和Z坐標表示8字形線圈中心的位置,以基礎(chǔ)坐標表示,單位為mm。由RX、RY和RZ表示8字形線圈中心的姿態(tài),單位為度(°)。最后,基于本節(jié)所示的工具坐標設(shè)置方法獲得8字形線圈的工具坐標系在機器人基礎(chǔ)坐標系下的“位姿數(shù)據(jù)”。
3.2 線圈校準
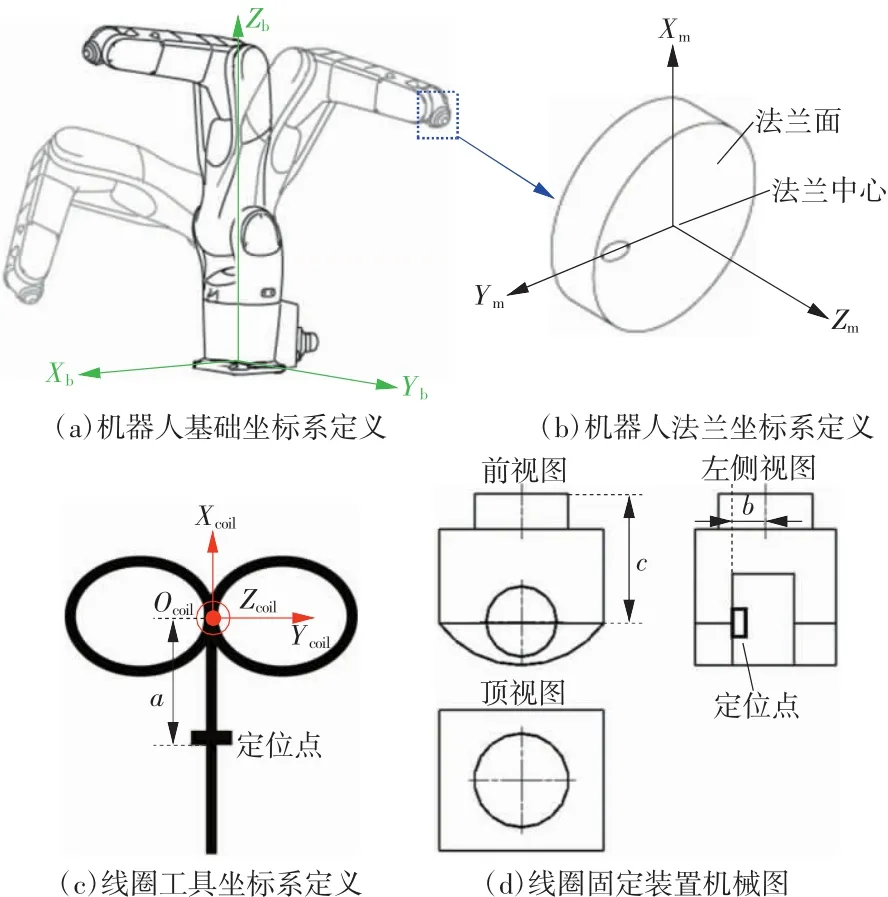
圖2 工具坐標系設(shè)置
對線圈進行校準以獲得刺激線圈的工具坐標系在NDI雙目相機的原坐標系中的“位姿數(shù)據(jù)”。圖3(a)展示了NDI雙目相機的原坐標系,2個紅外發(fā)光二極管陣列提供用于照射近紅外反射球形標記的近紅外光,2個圖像傳感器收集從近紅外反射球形標記反射的紅外光。圖3(b)展示了由NDI提供的包含4個球形標記的剛體(rigid body 8700449,NDI)。通過雙目相機2個圖像傳感器獲取的球形標記位置,計算剛體在原點坐標中的“位姿數(shù)據(jù)”。如圖3(c)所示,剛體固定在剛體安裝裝置。用于定位線圈的工具坐標系的定位探頭如圖3(d)所示。將探頭水平放置,使定位點位于線圈的工具坐標系位置,通過雙目相機可以得到線圈的工具坐標系在NDI雙目相機的原坐標系中的“位姿數(shù)據(jù)”。

圖3 線圈校準組件介紹
3.3 坐標系整合
圖4為基于線圈校準關(guān)聯(lián)機器人和NDI雙目相機的坐標系[23-24]。機器人的基礎(chǔ)坐標系定義為(Ob,Xb,Yb,Zb),NDI雙目相機的原坐標系定義為(Oc,Xc,Yc,Zc),8字形線圈的工具坐標系定義為(Ocoil,Xcoil,Ycoil,Zcoil)。通過3.1和3.2節(jié)所述方法可以獲取線圈工具坐標系在機器人基礎(chǔ)坐標系和雙目相機原坐標系的“位姿數(shù)據(jù)”,數(shù)據(jù)可以用齊次坐標表示,分別定義為。因此2個“位姿數(shù)據(jù)”的關(guān)系可以描述為

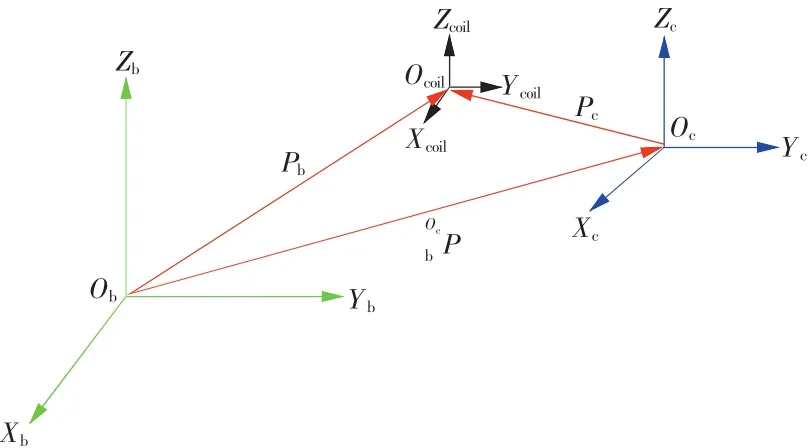
圖4 坐標系整合示意圖
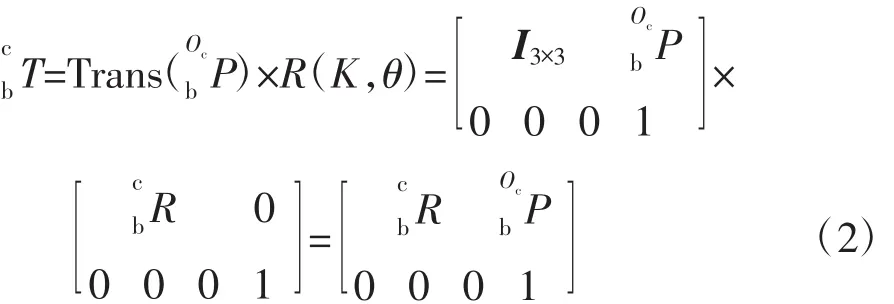
其中 I3×3為單位矩陣表示平移變換為雙目相機的坐標原點Oc在機器人基礎(chǔ)坐標系下的坐標:

R(K,θ)表示旋轉(zhuǎn)變換:

根據(jù)公式(1)~(4)可以獲取cbT,得到 NDI雙目相機原坐標和機器人基礎(chǔ)坐標系的齊次坐標變換,統(tǒng)一將雙目相機觀測到的刺激線圈和被試頭部的“位姿數(shù)據(jù)”轉(zhuǎn)換為機器人基礎(chǔ)坐標系下的“位姿數(shù)據(jù)”,方便后續(xù)控制[25]。本文后續(xù)設(shè)計的導航路徑和特征點計算方法均基于本節(jié)中整合的坐標系統(tǒng)。
4 導航路徑規(guī)劃和路徑特征點的計算
4.1 安全區(qū)域設(shè)置
安全性是機器人輔助TMS系統(tǒng)設(shè)計面臨的最重要的問題。然而,工業(yè)機器人普遍配備有用于高速運動的控制器,如果無法精細控制機器人的行進路徑,可能對被試對象產(chǎn)生傷害。本文設(shè)計的用于TMS機器人的導航路徑規(guī)劃和避障算法包含2個主要步驟:(1)安全區(qū)域設(shè)置;(2)導航路徑特征點計算。
圖5展示了安全區(qū)域的設(shè)置方法。完成被試注冊和坐標整合,系統(tǒng)軟件可以獲取機器人基礎(chǔ)坐標系中的被試頭部的位置坐標。通過公式(5)計算被試大腦的中心坐標:

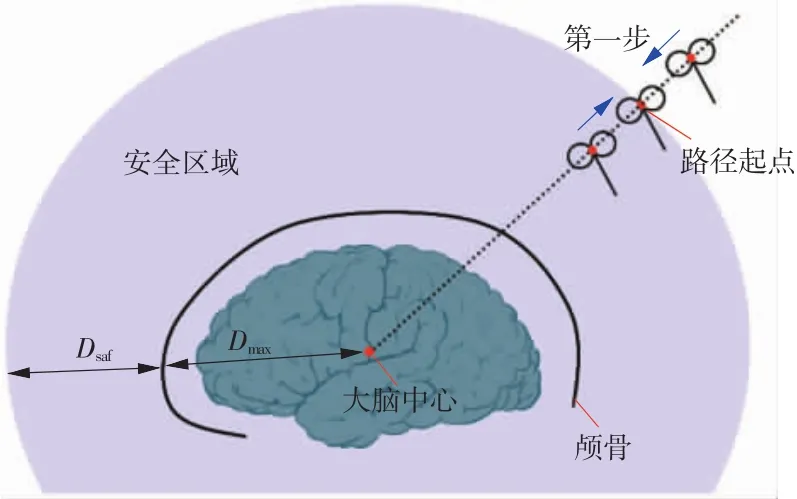
圖5 安全區(qū)域設(shè)置示意圖
其中,Xi、Yi、Zi定義為被試大腦在機器人基礎(chǔ)坐標系下的空間坐標,n代表參與計算的坐標點數(shù)量。通過公式(6)計算顱骨與大腦中心點之間的最大距離Dmax:

其中,Xk、Yk、Zk定義為被試顱骨在機器人基礎(chǔ)坐標系下的空間坐標。實驗操作人員根據(jù)不同線圈設(shè)定安全距離Dsaf。對于本文使用的70 mm 8字形刺激線圈,設(shè)定Dsaf=100 mm。根據(jù)公式(7),將以大腦中心點為球心,并以Dmax+Dsaf為半徑定義的球體設(shè)置為安全區(qū)域:

完成安全區(qū)域的計算后,接下來計算“路徑起點”。圖5展示了線圈第一步運動的路徑規(guī)劃和計算方法,公式(8)給出通過磁刺激線圈中心和大腦中心點的直線方程。直線和球形安全區(qū)域在被試頭部上方相交于一點,將其定義為“路徑起點”。程序首先沿公式(8)給出的直線方程將線圈中心移動至“路徑起點”。

4.2 導航路徑特征點計算
如圖6所示,在實施TMS實驗的過程中,通常需要實驗操作人員在重建的被試大腦皮層三維模型上設(shè)置刺激靶點,此靶點定義為“皮層靶點”。“皮層靶點”在機器人基礎(chǔ)坐標系下的空間坐標為Xct、Yct和Zct。通過公式(9)計算顱骨和“皮層靶點”之間的最小距離Dmin:

其中,Xk、Yk、Zk為被試顱骨在機器人基礎(chǔ)坐標系下的空間坐標,定義為“顱骨靶點”。通過“顱骨靶點”和“皮層靶點”的直線方程式由公式(10)給出:

直線和球形安全區(qū)域在被試頭部上方相交于一點,該點被定義為“中間節(jié)點”。控制線圈從“路徑起點”移動到“中間節(jié)點”的方法如圖6所示。
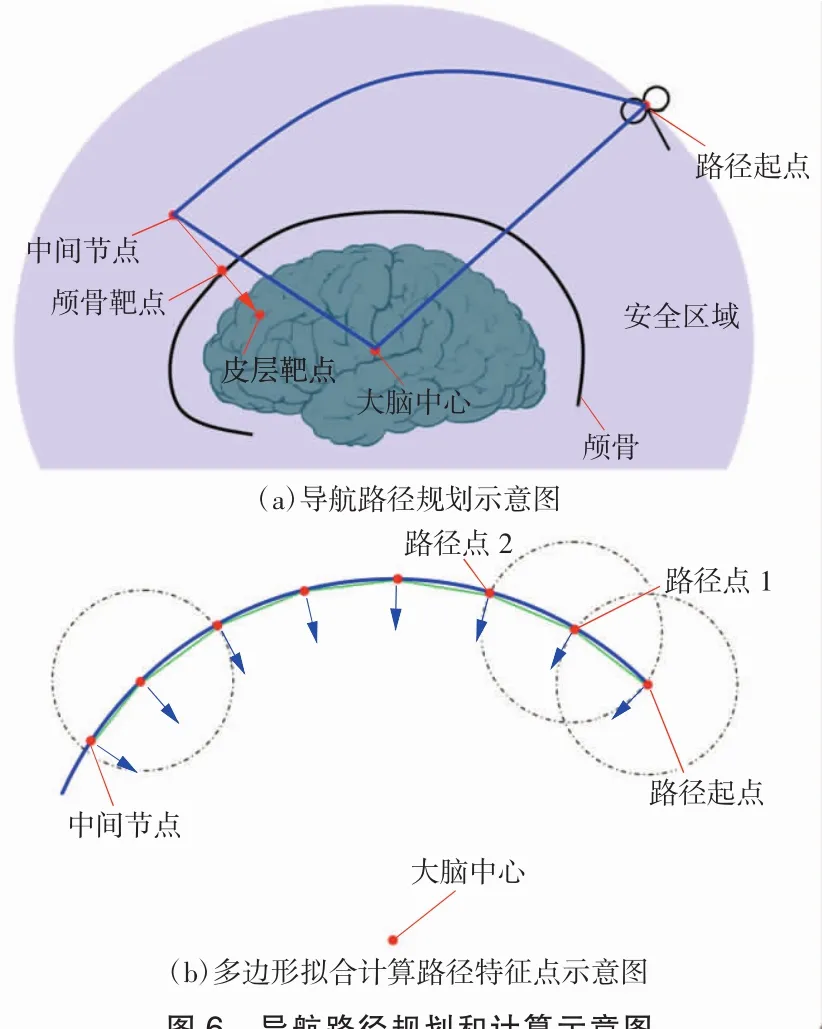
圖6 導航路徑規(guī)劃和計算示意圖
公式(11)給出了通過“中間節(jié)點”“路徑起點”和“大腦中心點”的平面:
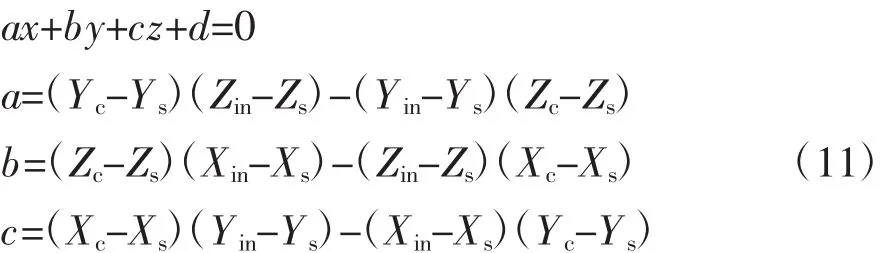

其中,Xs、Ys、Zs為“路徑起點”,Xin、Yin、Zin為“中間節(jié)點”。如圖6(b)所示,平面和球形安全區(qū)域以弧形相交。為了簡化控制方法,線圈的所有移動都設(shè)置為直線。因此,使用多邊形擬合獲取弧形導航路徑。首先定義以“路徑起點”為中心、半徑d=3 cm的球體:

弧形路徑和球體相交于2個點,選擇靠近“中間節(jié)點”的交點作為“路徑點1”。以路徑點為中心,以相同半徑定義球體,以相同的方式獲得第二個路徑點。通過該方法逐個計算所有路徑點,直到“中間節(jié)點”在球體內(nèi)部。機器人引導刺激線圈沿多邊形路徑行進,需要指出,刺激線圈的Z軸需要始終指向大腦中心點,如圖6(b)中紫色箭頭所示。
線圈到達“中間節(jié)點”后,程序旋轉(zhuǎn)線圈工具坐標系的Z軸指向“皮層靶點”,然后將線圈沿Z軸移動到“顱骨靶點”。
5 算法驗證
如圖7所示,在醫(yī)用機器人的前期研究中,需要使用頭部模型驗證算法的可行性[18]。為了方便算法驗證,本文使用跟實際線圈相同尺寸的線圈模型驗證算法。將頭部模型固定于光學平臺,首先使用圖7所示的定位探針(probe 8700340,NDI)在頭部模型表面均勻選擇30個點,記錄位置坐標。計算30個點的坐標均值定義算法中的“大腦中心”。為簡化算法驗證過程,獲取的大腦中心也作為“皮層靶點”參與路徑計算。其次使用定位探針依次在頭部模型左右半?yún)^(qū)各隨機選擇2個點作為“顱骨靶點”,定義為刺激靶點1、2、3、4。在頭部模型周圍隨機選擇20個位置作為線圈起始位置。然后將線圈移動至起始位置后,依次計算所有路徑起點、路徑點、中間節(jié)點的空間位置。最后控制機器人沿規(guī)劃路徑按靶點序號依次定位4個刺激靶點。觀察實驗過程中線圈和頭部模型是否產(chǎn)生接觸,并記錄第一個靶點的定位時間和全部4個靶點的定位時間。

圖7 TMS機器人系統(tǒng)算法驗證實物圖及定位探針
通過NDI提供的API命令讀取定位探針指示的空間位置,使用MATLAB 2010a完成坐標系整合和路徑規(guī)劃的軟件編程。將計算獲取的路徑點的位置數(shù)據(jù)導入VS-060教導機控制機器人沿規(guī)劃路徑行進。
設(shè)定機器人運動速度為VS-060最大速度的30%。從20個隨機位置分別定位4個靶點的行進過程中未發(fā)現(xiàn)線圈和頭部模型產(chǎn)生接觸。第一個靶點的定位時間為(13.6±3.65)s,全部4個靶點的定位時間為(59.1±3.64)s,滿足 TMS 實驗需求。
6 討論
本課題以TMS輔助機器人設(shè)計的安全性為前提,研究了控制TMS輔助機器人行進路徑的避障算法設(shè)計。
在通常的TMS治療過程中需要實驗人員用手握住線圈定位刺激區(qū)域,而治療時長可達30 min,實驗人員難以保證在治療過程中穩(wěn)定地保持刺激線圈的位置。因此目前臨床上普遍使用剛性支架固定TMS線圈后實施治療[26]。雖然使用支架的方式可以使線圈在刺激期間穩(wěn)定地保持其位置,但是隨著患者頭部的移動,刺激點隨之產(chǎn)生偏移。最簡單和最常用的方法是讓患者盡可能保持頭部不動,同時保持與線圈的接觸。顯然,像放射治療一樣,剛性頭部固定會使頭部運動降至最低[27]。然而剛性固定通常不能用于TMS,因為這種方法會導致患者嚴重不適并對患者產(chǎn)生壓力導致患者皮層興奮性增加。
因此,改進手持線圈的方式,使用機器人輔助TMS線圈定位的方法對于TMS的臨床應用具有重要意義[28]。機器人輔助TMS系統(tǒng)結(jié)合了神經(jīng)導航技術(shù)和自動化技術(shù)的優(yōu)勢,可以實現(xiàn)精準高效的刺激[29-30]。目前,國際上已有機器人輔助TMS系統(tǒng)的文獻報告,例如使用力-力矩-加速度傳感器(force-torqueacceleration sensor)實現(xiàn)的拖拽式TMS輔助機器人系統(tǒng)是將傳感器固定于線圈和機器人法蘭之間,通過反饋控制方法,實驗操作者可以拖動機器人定位線圈至刺激靶點[31]。也有對TMS輔助機器人的系統(tǒng)校準和系統(tǒng)測試的相關(guān)報告[17-18,32]。
實現(xiàn)更加安全的、自動化的TMS輔助機器人控制是本文研究的重點內(nèi)容。但是如何安全地實現(xiàn)刺激靶點的自動定位和切換目前還未見文獻報道。首先本文應用機器人避障技術(shù),基于刺激線圈的形狀特點,設(shè)計了TMS輔助機器人導航路徑規(guī)劃與避障算法。之后搭建了TMS導航機器人算法驗證系統(tǒng)。靶點定位實驗的結(jié)果證明本文設(shè)計的方法可以安全有效地實現(xiàn)刺激靶點的定位和切換。但是本算法獲取的定位時間約為13.6 s,手持線圈定位刺激靶點通常也可以控制在10 s左右,因此TMS輔助機器人無法縮短靶點定位時間。在實驗過程中本文設(shè)定機器人運動速度為VS-060最大速度的30%。設(shè)定更快的機器人運動速度可以縮短靶點定位時間,但過快的機器人運動速度對系統(tǒng)的安全性提出了更高的要求。
目前本文設(shè)計的TMS輔助機器人系統(tǒng)并不包含力反饋控制模塊,因此考慮前期測試的安全因素,并未使用被試對象參與算法驗證。而且本文算法測試使用的頭部模型的邊緣為圓弧形,但是實際人的頭部邊緣并不規(guī)則,有可能影響路徑末端的計算結(jié)果。所以在未來的研究中需要在TMS輔助機器人系統(tǒng)中加入力反饋控制模塊,實時監(jiān)控線圈和被試頭部的接觸力。完成系統(tǒng)整合之后還需要使用真實被試對象進行更加系統(tǒng)的測試和優(yōu)化。
7 結(jié)論
TMS在研究和治療一些精神疾病表現(xiàn)出了巨大的潛力。引入機器人技術(shù)可以解決手持線圈方法存在的精確性和復雜性問題。本文展示了一種用于TMS的機器人導航路徑規(guī)劃與避障算法。從測試結(jié)果中可以看出,本文提出的方法可以安全有效地引導機器人實現(xiàn)刺激靶點的定位和切換,為后續(xù)實現(xiàn)TMS輔助機器人系統(tǒng)的自動控制奠定基礎(chǔ)。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32