基于數據的燃氣輪機建模與控制技術概述
2019-06-17 11:59:28張兆宇劉尚明
熱力透平 2019年2期
張兆宇,劉尚明
(清華大學 能源與動力工程系 熱科學與動力工程教育部重點實驗室,北京 100084)
建模與控制技術在燃氣輪機運行過程中扮演著重要角色,對于運行優化、節能、延長設備運行壽命有重要意義。在燃氣輪機透平進口初溫持續提升,機組啟停和調峰要求日益提高的背景下,對模型與控制系統的要求也隨之提高。
傳統燃氣輪機建模方式基于工作機理,通過參數間的數學關系建立所需模型。但燃氣輪機非線性程度高,運行工況范圍大,大部分時間在非設計工況點運行,且在長期運行過程中部件特性會因退化發生偏移。傳統機理模型難以在大范圍運行工況點保持較高的計算精度,且模型隨部件特性變化進行更新的難度較大,存在一定的局限性。
在控制領域,傳統比例-積分-微分(PID)控制仍然是實際燃氣輪機機組使用的最主要的控制方式,結構簡單,容易實現。但燃氣輪機非線性、時變的特點使得PID控制的效果不盡如人意。此外,其他現代控制理論大部分也基于數學模型,在自適應方面同樣存在缺陷。
在上述背景下,基于數據的燃氣輪機建模與控制方法以運行數據作為實現的基礎,通過對機組運行數據的學習,使模型逼近系統特性,對系統進行描述,掌握機組的最佳控制策略。這一方式在大范圍工況的計算精度、模型復雜度、更新速度等方面優于傳統的數學模型,具有廣闊的研究前景。計算機性能的提升與商業軟件的開發也為數據方法提供了應用基礎。
本文將從建模與控制兩方面對國內外數據方法在燃氣輪機中的研究現狀進行介紹,為我國燃氣輪機模型的構建與控制系統的設計提供借鑒與參考。
1 基于數據的人工智能技術
隨著人工智能學科的發展,利用計算機模仿人類對系統進行辨識、建模和預測的數據方法在各工業領域中有著廣泛的應用。借助機器學習的方式,使人工智能從數據中學習系統特性,從而實現對建模對象的輸出預測并給出控制信號,是基于數據的對象建模與控制的基本思路。這一思想規避了傳統數學模型用明確數學關系式表示參數關系的局限,采用隱含關系表示系統輸入、輸出特性。由于模型和控制器是基于數據實現的,僅通過更新學習數據即可實現參數關系的更新,避免了傳統模型和控制器更新中重新計算數學關系式的問題。在燃氣輪機領域,目前已有研究中使用的機器學習工具主要有人工神經網絡、支持向量機等。
1.1 人工神經網絡
人工神經網絡是一種模仿人類大腦神經結構與行為的技術,具有并行信息處理、模式分類、記憶等功能。它利用神經元間的連接及權重值分配表示特定信息,并通過不斷修正連接權重值進行自我學習訓練,理論上能夠充分逼近任意復雜的非線性系統。
作為數據驅動的模型,人工神經網絡模型可以直接由實際燃氣輪機機組的運行數據生成,對燃氣輪機或控制器進行描述。將控制信號作為輸入參數,運行參數作為輸出參數,可以生成運行模型;反之,將運行參數作為輸入參數,控制信號作為輸出參數,可以生成控制器系統。人工神經網絡模型對于非線性、時變的系統而言,是一種行之有效的辨識工具。根據結構與原理的不同,神經網絡有多種類型,在燃氣輪機領域應用的主要類型有反向傳播(Back Propagation,BP)神經網絡、徑向基神經網絡、非線性有源自回歸(Nonlinear Auto Regressive eXogenous,NARX)神經網絡等。
1.1.1 BP神經網絡
BP神經網絡是基于多層感知器網絡的人工神經網絡,因采用誤差反向傳播(Back Propagation)算法得名。其結構簡單,使用方便,是應用最為廣泛的一類人工神經網絡,在非線性映射的擬合中扮演著重要的角色。
BP神經網絡基本結構如圖1所示,依次由輸入層、隱含層、輸出層組成。輸入層和輸出層為單層結構,隱含層可為單層或多層,但理論上單隱含層即可逼近任意復雜度的非線性系統。每層含有多個神經元,相鄰層間的神經元兩兩相互連接。輸入層神經元與輸入參數向量維數相同,輸出層神經元與輸出參數向量維數相同。數據由輸入層輸入網絡,乘以連接至各隱含層神經元權重之后求和,所得值經由傳遞函數處理,輸入至輸出層各神經元。再經由同樣步驟由輸出層神經元加權相加,并進行傳遞函數處理,得到輸出參數。

圖1 BP神經網絡結構示意圖
訓練過程中,首先通過前向計算得到誤差輸出,然后將誤差值反向傳播,作為調整神經元連接權重值的依據。通過使誤差梯度下降的方式逼近學習目標。
1.1.2 徑向基神經網絡
徑向基神經網絡與BP神經網絡均屬于前向型網絡,具有強大的非線性函數逼近能力。其結構如圖2所示,由具有徑向基函數神經元的隱含層和線性函數的輸出層組成。其訓練算法與BP神經網絡有較大不同, 分為無監督自組織學習階段與有監督學習階段。第一階段根據所有訓練樣
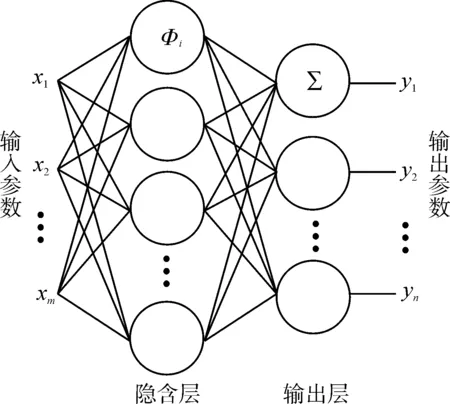
圖2 徑向基神經網絡結構示意圖
本確定基函數中心與擴展常數,第二階段確定隱含層與輸出層的連接權重值。
1.1.3 NARX神經網絡
NARX神經網絡屬于反饋型神經網絡,其原理思想為非線性有源自回歸系統,主要應用于時間序列模型領域的建模,其原理可以用以下公式表述:
y(t)=f[x(t-1),…,x(t-px),
y(t-1),…,y(t-py)]
(1)
式中:f為非線性函數,自變量為輸出y前py個時間步的值{y(t-1),…,y(t-py)}以及外源輸入x前px個時間步的值{x(t-1),…,x(t-px)}。其結構框架可基于BP神經網絡或徑向基神經網絡搭建,但在引入時間步迭代后需要將輸出層結果返回至輸入層,用于下一時間步的計算。
目前NARX網絡主要采用基于BP網絡的架構形式,其結構分為串-并行結構(如圖3所示)和并行結構(如圖4所示)兩種。一般在訓練時,串-并行結構的輸入層參數全部用訓練數據輸入,訓練完成后,輸出層連接至輸入層,網絡改為并行結構進行使用。基于BP網絡架構的NARX模型網絡的訓練通常采用Levenberg-Marquardt梯度下降算法,使誤差反向傳播,并調整各層間的神經元連接的權重值。

圖3 NARX網絡串-并行結構示意圖

圖4 NARX網絡并行結構示意圖
1.2 支持向量機
支持向量機是一種通用的機器學習方法,其基本思想是通過非線性變換,將輸入空間映射到一個高維特征空間,并在新空間中求取最優線性分類面。支持向量機具有學習速度快、搜索全局最優的優點。在建模過程中,需要選定的是核函數參數、不敏感損失函數參數和罰函數參數。這三項參數通常通過數值優化的方式求出。
2 基于數據的燃氣輪機建模技術
目前基于數據的燃氣輪機建模研究主要分為穩態工況辨識模型與動態工況模型。在并網運行狀態下,穩態工況辨識模型根據燃料流率、進口導葉(Inlet Guiding Vane,IGV)開度等機組運行控制量對機組運行參數進行預測。動態工況模型則對機組的動態過程,如啟停、變負荷等運行參數在控制變量影響下的時間序列進行預測。穩態工況模型實現的工具主要有BP神經網絡、支持向量機等;動態工況模型實現的工具主要有NARX模型、支持向量機等。
2.1 穩態工況辨識模型
2.1.1 神經網絡方法
葛榮彬等[1]分別采用BP網絡、徑向基函數網絡和廣義回歸神經網絡三種前饋型神經網絡對聯合循環機組進行了建模。與BP網絡不同,徑向基函數網絡和廣義回歸網絡可調整的參數為擴展速度,且神經元個數為訓練樣本的個數,故網絡規模較大,但收斂速度較快。在綜合性能方面,廣義回歸網絡訓練時長最短,預測誤差最小,最有希望得到應用,但其網絡規模目前受到限制。
R. Bettocchi等[2]測試了基于BP神經網絡建立的燃氣輪機模型在給定測量精度較低的輸入參數條件下的準確性與魯棒性。輸入參數的測量精度分為實驗室級別、標準級別和工業級別,不確定度依次增大。測試結果表明,隨著測量參數不確定度的增大,模型輸出的均方誤差增大。增加隱含層神經元個數,一定程度上可以降低模型的輸出誤差,但訓練周期隨之增大,且在工業級別的輸入條件下這一措施將失效。保證一定的訓練樣本數也可在一定程度上減小模型的誤差。
M. Fast等[3]以建立兩個BP神經網絡模型的方式,添加了對燃氣輪機除冰模式的識別功能。兩個神經網絡為串聯結構,第一級網絡判斷除冰模式是否開啟,第二級網絡給出各項參數的預測值。在各級網絡輸入參數的選取中采用了敏感性分析的方式,基于控制變量的思想進行多組訓練和測試,每組各取消一項不同的輸入參數,比較其誤差是否出現顯著增長。此外,對環境溫度進行了外推測試,結果表明誤差在可接受范圍內。但為了取得最佳效果,最好的方式仍然是擴大訓練集范圍,避免外推。
H. Asgari等[4]采用前向多層感知器網絡對某型單軸燃氣輪機進行系統辨識,通過輸入環境參數、燃料流率、機組負荷,對轉速、壓氣機和透平進出口溫度、壓力等17項運行參數進行預測。試驗結果表明,各訓練算法中以L-M算法的表現最佳,這一模型可用于離線的系統預測。

2.1.2 支持向量機方法
朱亞迪等[7]采用支持向量機對聯合循環機組發電熱耗參數進行了建模,模型參數通過遺傳算法進行尋優。隨機選擇模型參數的初始值,構造初始種群,經選擇、交叉、變異,產生新種群,輸入到支持向量機模型中進行訓練,評估其適應度,迭代至參數滿足要求。
陳永剛[8]使用最小二乘支持向量機對燃氣輪機氣耗特性進行建模,從負荷率和大氣溫度出發,進行氣耗曲線擬合。最小二乘支持向量機將傳統支持向量機訓練中的二次規劃問題轉化為線性方程組問題,引入核函數可求得最終解。通過試差法對核函數參數進行調優,直至獲得一組滿足要求的參數。但這一模型的泛化能力較差。
2.2 動態工況辨識模型
2.2.1 神經網絡方法
劉微[9]采用BP神經網絡對聯合循環機組燃氣輪機進行了動態工況建模,以IGV開度、轉速、燃料量作為輸入,輸出功率和透平出口溫度作為輸出,由每一時間步的輸入參數給出該時刻的輸出參數情況,從而完成整個動態過程的建模。
李韻婷[10]分別使用最小二乘線性模型、BP網絡、徑向基函數網絡對燃氣輪機動態過程進行建模。模型基本思路為給定前三時間步的輸入參數和輸出參數,對本時間步的輸出參數進行預測。試驗結果表明,最小二乘法建模不能很好地擬合參數間復雜的耦合關系,模型精確度較差;BP網絡和徑向基函數網絡的準確度較高。
張兆宇等[11]采用NARX模型方法對某9FA重型燃氣輪機啟動及并網加載過程中的關鍵運行參數進行了建模預測,并根據測試結果提出了模型輸入、輸出方案的修改和預處理措施,改善了模型測試結果。
H. Asgari等[12-13]采用NARX模型對燃氣輪機啟動過程進行了建模,輸入項包括本時刻前若干時間步的輸入參數和輸出參數,輸出項為本時刻輸出參數的預測值。模型可以很好地再現啟動過程的趨勢,在缺少IGV開度數據的前提下,模型的預測誤差仍在可接受范圍內。
M. Rahnama等[14]采用NARX網絡實現燃氣輪機并網后升負荷變工況過程的建模。M. H.Tarik等[15]采用NARX模型針對低NOX模式下的燃氣輪機變負荷過程進行了建模。N. Vaezi等[16]、H. Vafaeenezhad等[17]采用相同方式對燃氣輪機部分參數進行動態過程預測。R. Khalili等[18]對比了傳統的GGOVI機理模型和數據方法對燃氣輪機排氣溫度和輸出功率的預測結果。數據方法采用NARX模型的思想實現。機理模型預測結果平均誤差比NARX模型大,但單點的最大預測誤差控制得較小。
2.2.2 支持向量機方法
李輝等[19]采用支持向量機對燃氣輪機啟動過程進行了建模,模型結構在輸入當前環境條件、盤車功率等參數的條件下,預測下一時間步的燃氣輪機轉速和透平排氣溫度。模型的核函數參數和罰函數參數的選取采用了交叉驗證法。在訓練所使用的數據帶有噪聲成分的前提下,證明了支持向量機的可靠性。
X. Wu等[20]采用最小二乘支持向量機對燃料電池-微型燃氣輪機混合動力系統進行了建模,選用徑向基核函數,采用粒子群算法進行了優化。其目標為逼近NARX模型的原理公式,構造時間序列模型。研究測試了負載電流階躍輸入下的燃料電池運行溫度與透平入口溫度的動態響應。陳躍華等[21]同樣采用最小二乘支持向量機對燃料電池-燃氣輪機聯合發電系統進行了動態建模。模型輸入燃料氣和空氣流量,輸出燃料電池的工作溫度和透平進口溫度,采用徑向基核函數。該方法適用于建立實時控制系統模型。
3 基于數據的燃氣輪機控制技術
由于控制對象在長期工作中系統特性的偏移,以及非線性系統在工況點附近以外大范圍線性化假設不成立,PID控制不具有自適應性,其魯棒性較差。神經網絡控制不完全依賴于數學模型,通過學習大量的控制數據樣本,實現非線性控制器的逼近,可以有效解決被控系統非線性、時變的問題。神經網絡控制與模糊邏輯控制都是針對非線性、時變系統精確數學模型難以建立情況下的有效的控制方法。但對于多變量控制(Multiple-Input Multiple-Output, MIMO)系統,模糊邏輯控制需要編寫大量的邏輯判斷語句,而神經網絡在處理這一類問題上更具有優勢。
神經網絡控制的途徑有兩類:第一類通過神經網絡對PID參數進行整定,實現PID控制的自適應性;第二類直接給出各控制量的值。對于第一類方法,通常采用系統數學模型整定的最優PID系數作為訓練樣本。對于第二類方法,通常可以將設計的控制器視為系統動力學模型的逆模型,即通過輸入系統的狀態參數,輸出系統的控制參數。在此基礎上,將各類智能技術與神經網絡結合,進行優化改造,以對控制效果進一步改善。
I.T. Nabney等[22]、N. Dodd等[23]最先在燃氣發動機中進行了神經網絡控制的嘗試,通過神經網絡給出的燃料流率控制信號對發動機推力進行控制。S. Balamurugan等[24]對PID與人工神經網絡在燃氣輪機控制中的效果進行了比較,認為人工神經網絡的控制效果優于PID控制。N. S.Sisworahardjo等[25]比較了微型燃氣輪機中PI控制與神經網絡控制的方法,認為神經網絡控制誤差小于PI控制。
潘蕾等[26]和J. Wang等[27]采用BP神經網絡對PID系數進行在線調整,控制燃料流量實現燃氣輪機排氣溫度的控制,使系統具有良好的自適應能力和魯棒性。鄧奇超等[28]通過基于神經網絡的前饋控制實現了燃氣輪機的功率控制,同時一次調頻效果最佳,其效果優于GE和西門子的調頻控制方法。
A. M. Schaefer等[29]采用循環神經網絡(RNN)與強化學習結合的方式對燃料和IGV進行控制。先用RNN實現最小狀態空間的辨識,在低維問題下進行強化學習,然后將RNN與三層網絡結合,將RNN的輸出作為預測輸入,用這一網絡構造控制器,實現最優控制。V. Diwanji[30]采用非線性模型進行預測控制。使用神經網絡進行數據學習,對燃氣輪機模型輸出進行預測,然后用該模型的輸出作為反饋進行最優控制設計,生成控制信號序列。Y. Huang[31]通過自適應動態規劃與神經網絡結合的方式構造一個最優神經控制器,含有評估網絡和動作網絡兩部分。評估網絡學習近似代價函數或效用函數,其輸出將作為動作網絡輸入的一部分。動作網絡輸出控制動作,將評估網絡的輸出最小化。H. Asgari等[32]設計PID和帶有線性反饋的非線性自回歸滑動平均控制器兩種方式,通過燃料量控制燃氣輪機的轉速。其中后者通過非線性自回歸滑動平均模型,逆向求出控制器的各時刻輸出值,其實現思想借鑒了NARX模型。W.Deng等[33]、M.M. M.Iqbal等[34]分別設計自適應神經模糊系統(ANFIS)控制器進行微型燃氣輪機和重型燃氣輪機控制,其效果比神經網絡和模糊邏輯的單一方法好,且免去了MIMO系統中模糊規則編輯的大量工作。
4 結論與展望
針對目前基于數據的燃氣輪機建模與控制方法已有的廣泛研究,本文總結出了一系列行之有效的機器學習工具,包括基于BP、NARX神經網絡和支持向量機的建模方法,以及基于神經網絡的控制器設計。
但這些方法絕大部分仍然停留在仿真測試的程度,沒有更進一步應用在實際機組中。為了在未來進一步提高數據方法應用的可行性,需要關注與研究以下問題:
1)機器學習工具訓練計算過程中的優化問題。對于大部分機器學習工具,例如神經網絡或支持向量機,其學習速度與效果極大地受到相關參數設定或算法影響。例如神經網絡中的隱含層神經元數量、激活函數、訓練函數、基函數中心和擴展常數,支持向量機中的核函數參數,罰函數設置,在實際應用中往往沒有明確的指導方法,需要通過經驗或嘗試進行選擇與優化。為了進一步優化模型預測精度或控制器控制效果,在燃氣輪機這一特定領域仍然需要進一步研究數據模型學習過程的優化方法。
2)數據源質量把控。數據模型與數據方法控制的前提是足夠有價值的運行數據。在機組運行過程中,雖然會持續產生運行數據,但如果篩選、提取不得當,獲得的便是“垃圾數據”,在機器學習中反而產生負面作用。因此需要根據自身目的,篩選需要的數據類型,截取所需特定運行過程的數據,合理選擇采樣時間。
3)隨著人工智能學科的發展,新的數據學習方法也隨之產生。機器學習方法在其他領域獲得了成功應用,將其引入燃氣輪機領域,或與現有方法結合,能夠產生新的數據學習工具。例如,在時間序列模型研究中,Elman神經網絡是一種結構與NARX神經網絡類似的工具,并已有大量成功的建模實例[35-37]。但這一工具在熱力設備建模中的應用遠不及NARX神經網絡廣泛。因此,將這一工具引入燃氣輪機動態工況建模應用,具有重要的研究意義。
隨著人工智能與機器學習學科的發展,基于數據的建模與控制方法在精確性、可靠性方面將不斷提升,在實際燃氣輪機機組中的應用前景將更加廣闊。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創版(2016年10期)2016-11-25 10:28:30
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
