小型無人機載SAR在SAR干擾系統(tǒng)試驗中的應(yīng)用
2019-06-15 07:47:16劉正堂程彥杰
火力與指揮控制 2019年1期
劉正堂,程彥杰,周 文,薛 寒
(中國洛陽電子裝備試驗中心,河南 洛陽 471000)
0 引言
合成孔徑雷達(SAR)是一種具有高分辨能力的微波成像雷達,在距離向利用脈沖壓縮技術(shù)得到高分辨率,在方位向利用合成孔徑技術(shù)得到高分辨率,從而得到目標(biāo)的高分辨率圖像[1]。與光學(xué)成像相比,SAR能夠全天時全天候?qū)Φ剡M行觀測,不受黑夜、云霧等自然條件影響,而且在特定頻率下能夠穿透地表和植被獲取地表下的信息,因而在地質(zhì)探測、地形測繪等民用領(lǐng)域和目標(biāo)識別、戰(zhàn)場偵察等軍事領(lǐng)域有著廣泛的應(yīng)用前景[2]。
無人機是利用無線電遙控設(shè)備或者機載程控系統(tǒng)進行操控的非載人飛行器。與有人駕駛飛機相比,無人機具有無人員傷亡風(fēng)險、性價比高、機動性能好、生存能力強、造價低廉等特點[3]。SAR載荷與無人機相結(jié)合有利于無人機整體性能的發(fā)揮。SAR設(shè)備的主動探測特點彌補了光電載荷設(shè)備的不足,使無人機系統(tǒng)具備了全天候全天時的探測能力。SAR載荷的高分辨率、大探測范圍的特點,使得無人機系統(tǒng)具有更高的工作效率,便于應(yīng)用和降低成本[4]。SAR的遠探測距離、側(cè)向觀測等特點,有利于無人機遠離目標(biāo)進行探測,避免危險、提高生存能力。
對合成孔徑雷達干擾系統(tǒng)(簡稱SAR干擾系統(tǒng))能靈活有效干擾星載SAR,降低其偵察監(jiān)視和目標(biāo)定位能力。由于缺少有效的配合目標(biāo)和威脅環(huán)境,SAR干擾系統(tǒng)試驗難以擺脫“缺對手、缺環(huán)境、難評估”的尷尬。組織SAR干擾系統(tǒng)試驗時,通常采用大型飛機載特定頻段SAR,構(gòu)建星載SAR威脅環(huán)境。由于大型飛機對氣象條件依賴強、飛行費用高、難以滿足SAR干擾系統(tǒng)多批次高強度的試驗需求。
本文提出了一種小型無人機載SAR用于SAR干擾系統(tǒng)試驗的思路。針對小型無人機載SAR在測繪帶寬、接收機動態(tài)范圍、靈敏度等方面存在的問題,設(shè)計了一種無人機載SAR半實物仿真系統(tǒng)方案。該系統(tǒng)采用收發(fā)分置技術(shù),利用無人機載SAR設(shè)備發(fā)射SAR信號,地面設(shè)備同步模擬SAR回波信號,利用射頻接收系統(tǒng)接收SAR干擾信號,將干擾信號與模擬的回波信號進行鏈路合并,最后通過SAR成像處理,在PAD終端直觀展示和評估對SAR的偵察和干擾效果。
1 SAR電子對抗試驗運用模式分析
1.1 典型小型無人機載SAR系統(tǒng)
TUAVR戰(zhàn)術(shù)型無人機載SAR系統(tǒng)是由諾格公司研制,專為美國陸Shadow200戰(zhàn)術(shù)監(jiān)視和目標(biāo)截獲無人機設(shè)計的SAR雷達[5]。TUAVR重量低于30kg、耗電小于500 W,發(fā)射機采用新型的微波功率模塊,方位向掃描范圍擴大到360°。TUAVR于1998年開始研制,2001年3月在無人機上試飛成功,同年裝備部隊。
在美國空軍資助下,美國Sandia實驗室于2005年成功研制了可裝載小型戰(zhàn)術(shù)型無人機平臺的MiniSAR系統(tǒng)[6]。MiniSAR工作在Ku波段、工作在條帶或聚束模式,最高分辨率為0.1 m、作用距離10 km~23 km、總重量低于12.2 kg。2006年10月,MiniSAR系統(tǒng)搭載在洛·馬公司的小型“天空幽靈”(SkySpirit)戰(zhàn)術(shù)無人機系統(tǒng)上成功進行了演示。
NanoSAR是美國ImSAR公司與Insitu公司合作研發(fā)的目前世界上最小的SAR[7],如圖1所示。重為1磅(0.45 kg),幾乎能為所有機載平臺(包括無人機)提供全天候偵查和地理定位。以往SAR只能安裝在大型、昂貴的無人機平臺上,而小型的無人機偵察平臺只能安裝光學(xué)傳感器和紅外傳感器,致使偵察平臺無法在惡劣的天氣條件下工作。NanoSAR的出現(xiàn)使小而輕便的無人機平臺能在各種不利條件和可見度極低的情況下成像并跟蹤移動目標(biāo)。

圖1 NanoSAR系列實物圖
我國針對微小型無人機載SAR系統(tǒng)的研制起步時間較晚,于2010年左右才開始進行,但在以往豐富經(jīng)驗基礎(chǔ)上進展迅速,并完成了實際系統(tǒng)研制,如中科院電子所、中電38所和北京理工大學(xué)等都研制出了微型SAR系統(tǒng)[8]。其中電子所D3160型SAR是一種采用連續(xù)脈沖新體制的微小型SAR系統(tǒng),可工作在X或Ku頻段,重量小于4 kg,探測距離達到10 km,分辨率優(yōu)于0.3 m。D3160型SAR于2013年完成了研制,并加裝在三角翼、無人機等飛行器上進行試驗和測試。圖2是D3160型SAR及加裝在多旋翼無人機上的照片,包括雷達設(shè)備和天線兩個單元。下頁表1給出了上述典型小型無人載SAR的技術(shù)參數(shù)。

圖2 D3160型無人機載SAR實物圖
1.2 小型無人機載SAR運用分析
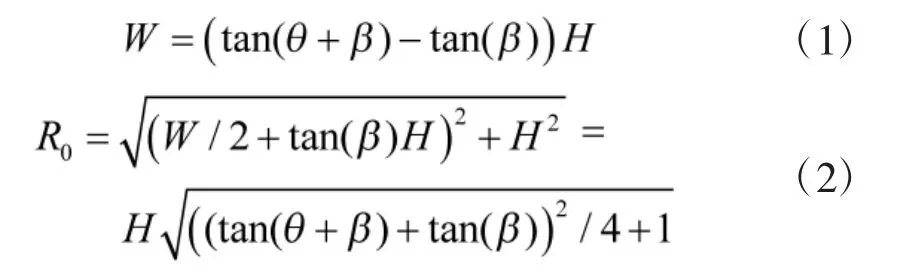
目前國內(nèi)外主流的微型SAR在分辨率上均可以做到1 m以下,探測距離大于1 km,重量在5 kg左右,具備了裝載小型無人機的條件。假設(shè)無人機載SAR工作在正側(cè)視條帶工作模式,干擾機在測繪帶中心,忽略地球曲率的影響,則無人機載SAR和SAR干擾機的相對位置關(guān)系如下頁圖3所示。
圖3中,H為無人機飛行高度,θ為SAR波束寬度,β為SAR最大俯視角,R0為無人機載SAR到SAR干擾機的距離,W為測繪帶的寬度。由幾何關(guān)系可知
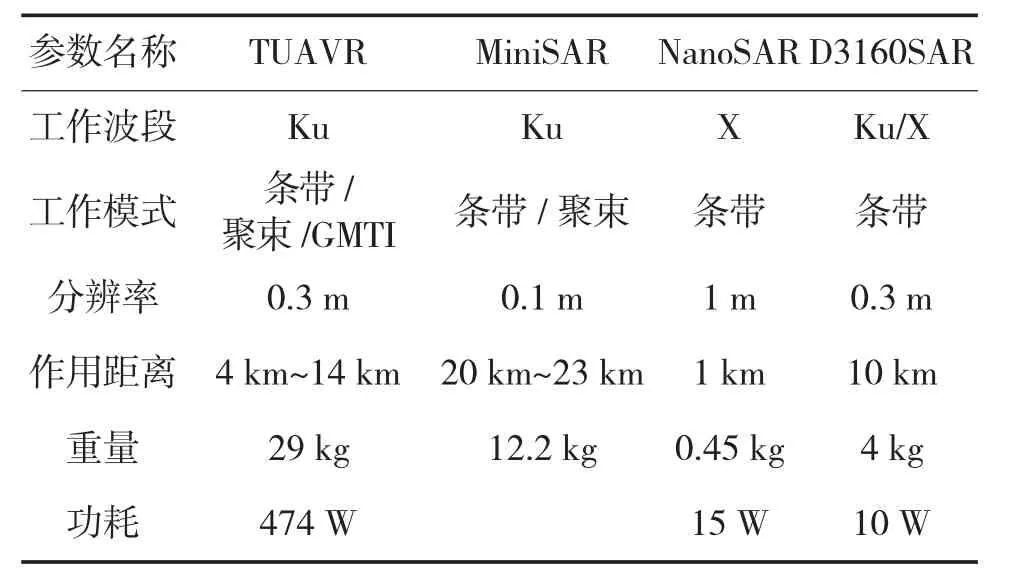
表1 典型小型無人機載SAR技術(shù)參數(shù)
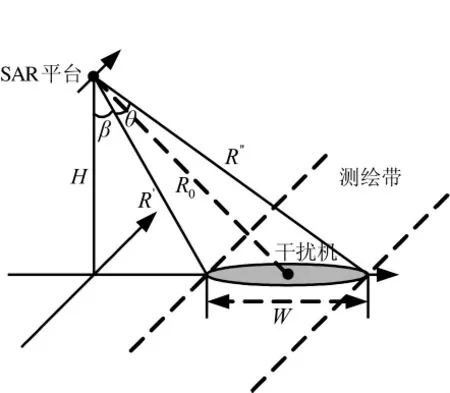
圖3 無人機載SAR與干擾機位置關(guān)系示意圖
假設(shè)SAR在波束中心方向上天線增益為Gt,且收發(fā)共用一個天線,天線波束指向目標(biāo),SAR接收天線有效孔徑為Ae為工作波長,則天線有效孔徑與天線增益的關(guān)系為:

假定發(fā)射機功率為Pt,SAR干擾機的發(fā)射功率為Pj,在SAR天線波束中心方向上的夾角為φ,忽略各種損耗,可得SAR干擾設(shè)備偵察接收機和SAR接收機端的信號功率為:
其中,Bj和Bt分為SAR干擾機與SAR接收機的工作帶寬。上式中第1項為SAR回波信號,第2項為干擾信號,則SAR接收機輸入端的信干比為:
經(jīng)過成像處理,目標(biāo)回波獲得了距離壓縮和方位壓縮的處理增益,成像后的信干比為:

其中,γγ和γa分別為距離向壓縮增益和方位向壓縮增益。SAR 的 γγγa一般約為 103~106量級[9],即處理增益約為30 dB~60 dB。
根據(jù)上述分析,選取典型無人機載SAR工作參數(shù)為:發(fā)射功率5W,工作帶寬200M,工作頻率18G,天線增益 5 dB,波束寬度 θ=30°,俯視角 β=30°;選取典型大功率SAR干擾裝備的工作參數(shù)為:發(fā)射功率1 MW,工作帶寬200 M,天線增益50 dB,無人機飛行高度1 km,通過上述各式計算可得:測繪帶寬W=1.16 km,干擾機到SAR的距離R0=1.4 km,SAR干擾機偵察天線口面功率Pγj=-61.6 dBW,SAR接收機天線口面功率Pγt=-8.6 dBW,SAR接收機輸入端信干比(S/Nj)γ=-178 dB。
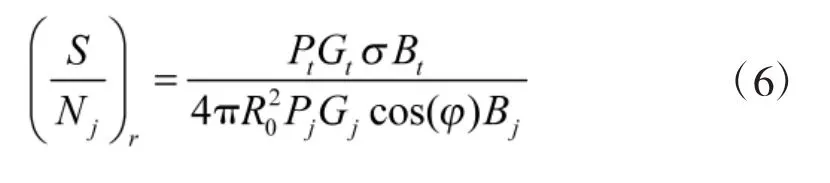
由上述數(shù)據(jù)可以看出,無人機載SAR的測繪帶寬為1.16 km,遠遠小于典型星載/機載SAR的測繪寬帶,難以滿足試驗需求。干擾機到SAR的距離為2 km,SAR干擾機偵察天線口面的信號功率為-61.6 dB,大于典型SAR偵察接收機的靈敏度,可以檢測到SAR信號。而SAR接收機端的信號功率為-8.6 dBW,遠遠超出了其接收機動態(tài)范圍,可能會導(dǎo)致SAR接收機過載。此外,SAR接收機輸入端的信干比為-178 dB,即使加上60 dB的處理增益,信干比仍達-120 dB左右。圖4給出了MiniSAR成像的真實數(shù)據(jù)以及受不同程度干擾時的受擾結(jié)果。從圖中可以看出,當(dāng)SNR為-20 dB時,已無法識別圖像信息。因此,當(dāng)SNR為-120 dB時,SAR圖像更無法識別。
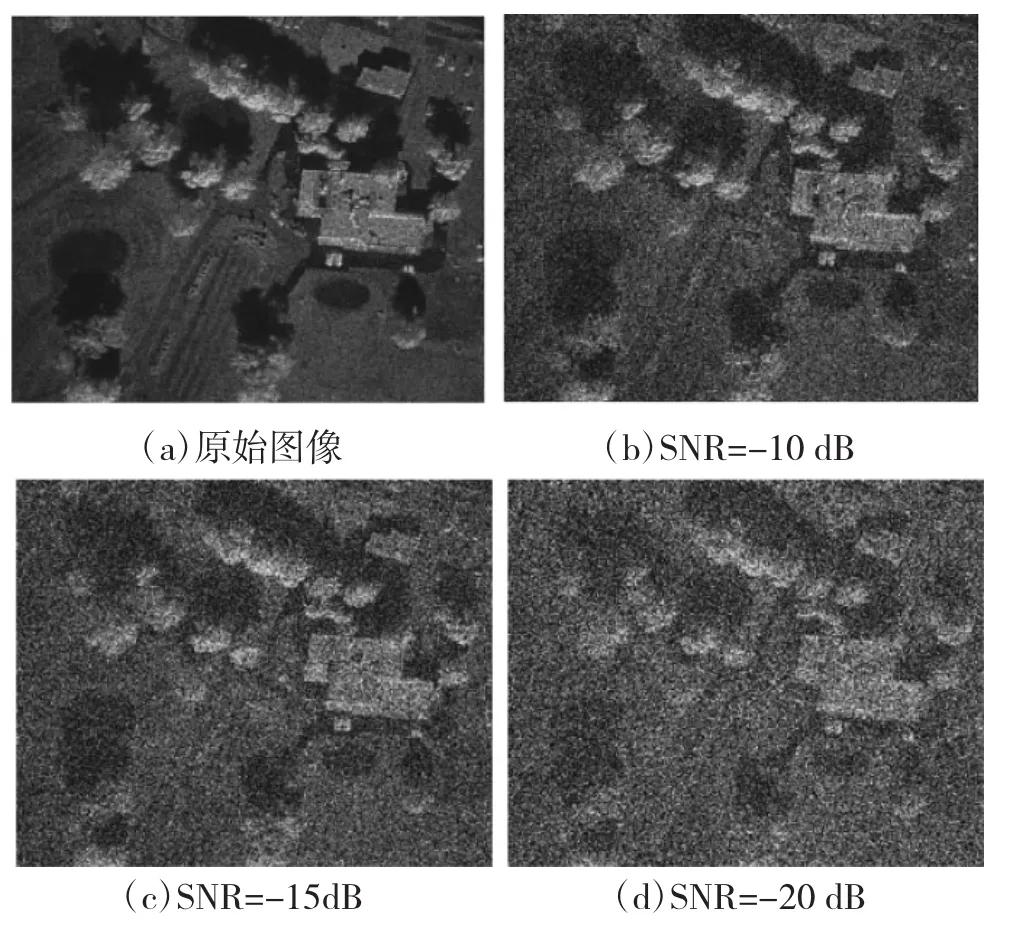
圖4 MiniSAR圖像受不同強度干擾結(jié)果
基于上述分析可見,小型無人機載SAR在測繪帶寬度、接收機動態(tài)范圍、接收信噪比等方面難以滿足SAR干擾系統(tǒng)試驗需求,故小型無人機載SAR無法直接用于SAR干擾系統(tǒng)試驗。
2 無人機載SAR半實物仿真系統(tǒng)設(shè)計
2.1 無人機載SAR半實物仿真系統(tǒng)方案
由上節(jié)分析可知,無人機載SAR直接用于SAR干擾系統(tǒng)試驗時,會面臨測繪帶過窄、干擾信號功率過大、信噪比過高的問題,難以滿足實際試驗需求。為解決這一問題,考慮一種采用收發(fā)分置技術(shù)的“無人機載SAR+地面SAR全鏈路模擬設(shè)備+射頻接收機”的無人機載SAR半實物仿真系統(tǒng)方案。如圖4所示,無人機載SAR只發(fā)射SAR信號,不進行回波接收;地面SAR全鏈路模擬設(shè)備同步進行回波信號模擬,射頻接收機接收SAR干擾機的副瓣或背瓣信號,這樣可大幅降低干擾信號功率,經(jīng)下變頻處理和ADC轉(zhuǎn)換和功率衰減等處理,與回波模擬信號進行鏈路合并,然后進行SAR成像,最后通過PAD終端直觀展示SAR受干擾效果。
2.2 系統(tǒng)組成與功能
圖5 無人機載SAR半實物仿真系統(tǒng)方案示意圖
如圖5所示,系統(tǒng)由無人機載SAR平臺、仿真控制模塊、射頻接收模塊、回波信號產(chǎn)生模塊、干擾信號產(chǎn)生模塊、成像處理模塊、評估模塊組成。其中,無人機載SAR模塊負責(zé)發(fā)射固定頻率的SAR信號,引導(dǎo)SAR偵察設(shè)備對SAR信號進行偵察;射頻接收模塊負責(zé)接收SAR干擾系統(tǒng)的干擾信號,并將干擾信號下變頻處理后傳送給干擾信號產(chǎn)生模塊;仿真控制模塊負責(zé)初始化無人機載SAR平臺的發(fā)射參數(shù),控制回波信號模擬模塊和干擾信號產(chǎn)生模塊生成相應(yīng)的回波信號和干擾信號;回波信號產(chǎn)生模塊負責(zé)模擬生成指定區(qū)域的SAR回波信號,為SAR干擾系統(tǒng)的干擾信號提供配合目標(biāo),為后續(xù)的成像處理提供原始數(shù)據(jù);干擾信號產(chǎn)生模塊是將下變頻處理后的中頻干擾信號進一步處理為基帶信號,并考慮到系統(tǒng)的衰減和相位變化,將干擾信號按照特定的時序進行排列;成像處理模塊將回波信號和干擾信號按照特定時序進行疊加,并進行SAR成像處理,得到受干擾后的SAR圖像;效果評估模塊分為SAR偵察評估和SAR干擾評估兩個模塊,分別根據(jù)相應(yīng)指標(biāo)對SAR干擾系統(tǒng)的偵察和干擾效果進行評估,并在相應(yīng)的終端上進行展示。
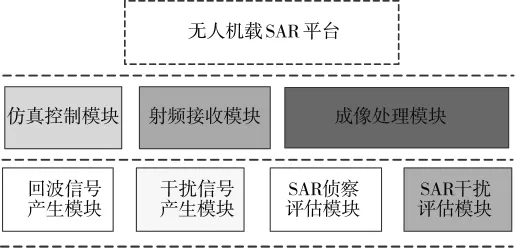
圖6 無人機載SAR半實物仿真系統(tǒng)功能組成
2.3 系統(tǒng)工作過程
1)仿真控制模塊對衛(wèi)星軌道和發(fā)射信號等參數(shù)進行初始化設(shè)置,無人機載SAR平臺升空,對SAR干擾系統(tǒng)所在區(qū)域發(fā)射固定頻段的SAR信號,模擬偵察衛(wèi)星對指定區(qū)域的成像偵察。
2)SAR干擾機偵察系統(tǒng)偵察到無人機載SAR平臺發(fā)射的SAR信號后對信號進行偵察定位和分選識別,真實模擬對星載SAR發(fā)射信號的主瓣偵察、旁瓣偵察等SAR偵察過程。
3)SAR偵察系統(tǒng)將偵察結(jié)果傳送給SAR干擾系統(tǒng),SAR干擾系統(tǒng)根據(jù)偵察的SAR信號參數(shù),選取合適的干擾樣式對SAR進行壓制式或欺騙式干擾。
4)射頻接收模塊接收SAR干擾系統(tǒng)的干擾信號,進行下變頻處理,并將干擾信號傳送給干擾信號產(chǎn)生模塊,實現(xiàn)對干擾信號的無縫接收。
5)仿真控制模塊根據(jù)無人機載SAR平臺發(fā)射信號參數(shù)控制回波產(chǎn)生模塊同步產(chǎn)生相應(yīng)的回波信號,并控制干擾信號產(chǎn)生模塊對干擾信號進行解析,按照時序和相位要求以及等效輻射功率產(chǎn)生相應(yīng)的干擾信號。
6)成像處理模塊根據(jù)干擾的時序和類型,對回波信號與干擾信號進行合路疊加,依據(jù)仿真控制模塊模擬的星載SAR工作模式,選擇對應(yīng)的成像處理方法,對包含干擾信號的回波信號進行成像處理,根據(jù)回波信號和干擾信號進行SAR成像。
7)效果評估模塊根據(jù)SAR成像處理結(jié)果,結(jié)合評估指標(biāo),分別對SAR偵察和SAR干擾的效果進行評估,結(jié)合二者評估結(jié)果對整個SAR對抗行動效果進行評估,并進行干擾效果展示。
3 SAR半實物仿真系統(tǒng)關(guān)鍵技術(shù)
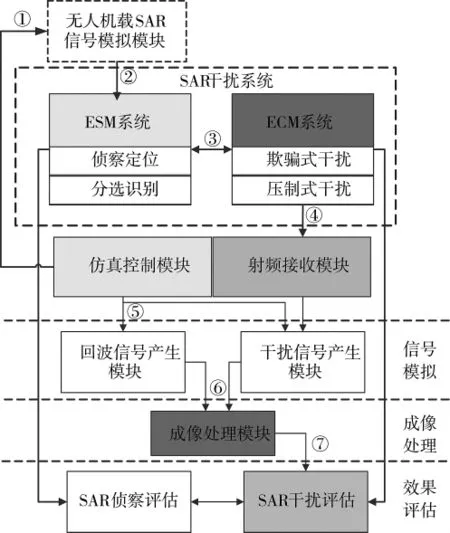
圖7 SAR對抗試驗半實物仿真系統(tǒng)工作過程
本系統(tǒng)涉及的關(guān)鍵技術(shù)包括SAR干擾信號仿真技術(shù)、高效高精SAR回波模擬技術(shù)、基于半實物鏈路的信號合成技術(shù)、SAR干擾效果評估技術(shù)4個方面。
3.1 SAR干擾信號仿真技術(shù)
SAR干擾信號產(chǎn)生需要與SAR干擾系統(tǒng)實現(xiàn)交聯(lián),要能夠產(chǎn)生相應(yīng)的干擾樣式和干擾類型。此外根據(jù)回波模擬對象是機載還是星載,還需要根據(jù)距離將接收的干擾信號進行等效輻射功率變換[10]。如果考慮系統(tǒng)擴展能力,還需要支持對新體制的干擾樣式的擴展功能。因此,多干擾樣式和干擾參數(shù)的SAR干擾信號仿真技術(shù)是本系統(tǒng)的關(guān)鍵技術(shù)之一。
3.2 高效高精度SAR回波模擬技術(shù)
SAR回波信號模擬是開展SAR成像處理算法研究、雷達系統(tǒng)性能分析研究等工作的基礎(chǔ)。由于星載SAR空間幾何關(guān)系復(fù)雜,雷達系統(tǒng)參數(shù)較多,仿真過程復(fù)雜,計算量大,同時由于SAR回波信號模擬過程中對相位精度等要求較高,進行大場景回波信號模擬時,需要考慮高效的SAR回波算法和硬件支持方案,為此SAR回波信號仿真是本系統(tǒng)的關(guān)鍵技術(shù)之一。
3.3 基于半實物鏈路的信號合成技術(shù)
為提高半實物仿真鏈路干擾效果的可信度,仿真控制模塊需要識別SAR干擾系統(tǒng)的干擾參數(shù),控制干擾信號產(chǎn)生模塊產(chǎn)生干擾信號。干擾信號產(chǎn)生模塊產(chǎn)生的數(shù)字干擾信號不能直接與回波信號直接疊加,需要考慮由于SAR平臺(機載/星載)與干擾系統(tǒng)的空間幾何關(guān)系引起的能量衰減和相位延遲。另外,將半實物鏈路產(chǎn)生的干擾信號按照特定的時序和回波信號疊加,還需要考慮干擾系統(tǒng)的干擾樣式和信號生成方法。因為基于半實物鏈路的信號合成技術(shù)也是本系統(tǒng)的關(guān)鍵技術(shù)之一。
3.4 SAR干擾效果評估技術(shù)
SAR偵察系統(tǒng)對SAR信號的截獲、分選、識別過程的效果評估,需要考慮到無人機載SAR平臺與常規(guī)的機載/星載SAR平臺在距離和機動性上存在差異,因此,SAR信號的功率特性和空間特性與常規(guī)的SAR信號也不同,對無人機載SAR偵察和干擾效果的評估要考慮信號差異的因素。目前針對SAR偵察干擾評估的研究較少,尚未有成熟的指標(biāo)體系,因此,對SAR偵察和干擾效果的評估是本系統(tǒng)的關(guān)鍵技術(shù)之一。
4 結(jié)論
本文針對SAR干擾系統(tǒng)試驗問題,提出一種小型無人機載SAR系統(tǒng)用于SAR干擾系統(tǒng)試驗的思路,分析了小型無人機載SAR直接用于SAR對抗試驗時存在的問題,基于上述問題,設(shè)計了一種用于SAR干擾系統(tǒng)試驗的無人機載SAR半實物仿真系統(tǒng),給出了系統(tǒng)的功能組成和工作流程,闡述了系統(tǒng)的關(guān)鍵技術(shù)。本文研究成果可為SAR干擾系統(tǒng)試驗及無人機載SAR半實物仿真系統(tǒng)建設(shè)提供理論借鑒和技術(shù)支撐。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25