天光一號預放大器自動準直技術研究
2019-06-14 03:58:30胡鳳明高智星田寶賢
原子能科學技術 2019年6期
關鍵詞:系統
李 靜,王 釗,胡鳳明,高智星,田寶賢
(中國原子能科學研究院 核物理研究所,北京 102413)
天光一號是我國最大型的高功率準分子激光系統,工作波長為248 nm,其角多路系統光束傳輸方向的準確控制能力決定了放大器的幾何填充和能量提取水平。天光一號裝置的光路中包含多臺放電泵浦激光器、電子束泵浦放大器及大量的光學元件、組件,尤其是激光分成多路后,在空間形成交錯,使得光路極為復雜。為了避免各路光束相互之間發生串擾產生靶前預脈沖,保證系統運行時將從振蕩器發出的種子光經角多路系統傳輸、放大后,穩定精確地照射到靶面上,必須采用光路全自動化準直方法,這是確保光束穩定精確地照射到靶面上的唯一途徑[1-4]。
國內神光Ⅱ、神光Ⅲ等大型激光裝置均先后開展了自動準直技術的研究工作[5-16],進行了相關計算并搭建了局部光路平臺進行實驗研究。他們多采用引入輔助光源并選取近場點與遠場點的方法,進行光路自動準直。遠場點取在光路的焦點處相當于無窮遠的位置,利用遠場圖像來監測光束的方向,再在主光路中選取一特定位置作為近場點,利用近場圖像來監測光束的方位。
本文選取光程較長、組件較多的預放大器光路作為關鍵控制對象對天光一號裝置自動準直方法進行研究。根據準分子激光的特點,采用主光路光源作為準直光源,并利用判斷光斑缺損的方法進行準直,在預放大器的角多路傳輸光路上實現三束光的自動準直。
1 自動準直方法建立
1.1 基準光源選取
天光一號KrF高功率準分子激光裝置的光路系統較為復雜,為了確定適合其實際光路系統自動準直的方案,首先選取單路預放大器輸入、輸出作為控制對象。對于角多路編碼光束在預放大器中的放大,光束傳輸方向決定了幾何填充和能量提取水平,保證光束按預定方向通過預放大器至關重要;為保證光束的均勻性,在像傳遞過程中像面位置不能發生變化。曾嘗試采用國內外較通用的利用輔助準直光源的遠場點和近場點實現光路自動準直的方法。實驗結果發現,由于主光源(波長248 nm)與輔助光源(He-Ne,波長632 nm)的波長不同,導致主光源的光束傳輸路徑與輔助準直光源的光路無法精確重合。此外,在實驗中還發現,用于監測近場點和遠場點反射的輔助光路和整個復雜的主振蕩功率放大器(MOPA)系統在空間上很難錯開。綜上考慮,需要開展直接利用主光路光源進行定位的可行性研究。
1.2 預放大器輸入、輸出自動準直方案
在天光一號裝置的角多路系統中,前端種子光經分束光路分為3束,通過三腔放大器放大后的激光照射到預放大器的輸入全反鏡上。預放大器單束光路如圖1所示,光束通過入射透鏡后,注入預放大器,通過預放大器前窗鏡、后窗鏡、后腔鏡進行振蕩雙程放大后輸出,再經過輸出透鏡,照射到輸出全反鏡上。
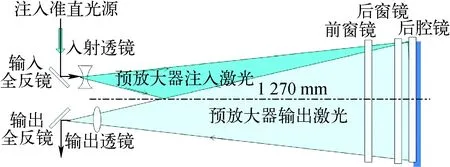
圖1 預放大器單束光路示意圖Fig.1 Scheme of beam propagation through preamplifier
為驗證直接監測光束傳輸方法的可行性,根據光傳輸原理和實際光路情況,制定了監測調節實驗方案。最初的考慮是,利用CCD監測后腔鏡上光斑圖像獲得的反饋信號控制調節預放大器輸入全反鏡,完成第1段光路準直;再通過CCD監測預放大器輸出全反鏡獲得反饋信號來控制后腔鏡的調節,完成整個預放大器光路的自動準直。但調研中發現此方案難點較多:首先,直徑φ135 mm后腔鏡及支撐架的質量為6 kg,其四維調節平臺需改為電動控制平臺,由于載質量問題四維調節平臺設計難度和造價均較高;其次,后腔鏡上的光斑直徑較大,監測點空間局限等問題造成后腔鏡監測CCD安裝位置較難解決。
預放大器光路較長,即使入射光偏移很小,遠程鏡面上的位移量也會較大。因此,選擇直接用CCD監測預放大器輸出全反鏡上的光斑、反饋信號控制調節預放大器入射全反鏡角度的方案,對此方案進行實驗驗證。選用穩定的紅光模擬注入光光源,在保證注入入射全反鏡上光斑位置近場分布不變的條件下,調節輸入全反鏡的入射角度,確定入射角度變化的調節范圍,即在多大調節范圍內,像面位置無明顯變化,光斑幾何填充無缺損,能量提取達到最大。進而確定輸入全反鏡角度旋轉范圍及步進電機控制的最小步長。

圖2 預放大器單束光路尺寸Fig.2 Spatial parameter of beam propagation through preamplifier
預放大器單束激光輸入、輸出全反鏡與窗鏡的中心呈軸對稱分布,預放大器單束光路尺寸如圖2所示,AM為輸入全反鏡到前窗鏡的距離,AB為入射光的光軸,CB為輸入、輸出全反鏡到后腔鏡的距離,MF為前窗鏡有效面積的半徑,HE為入射到前窗鏡上光斑的半徑。已知D=CB=12 700 mm,D1=FB=730 mm,d=MF=AC=60 mm,d1=HE=55 mm,設前窗鏡上光斑中心與前窗鏡中心的距離EF為h,光斑最大可移動的距離HM為Δd,所對應的最大可偏移的角度∠MAH為α,AB與AC的夾角為θ,由三角形公式可得:
則:
Δd=d-d1-h=
60-55-3.45=1.55 mm
由于輸入全反鏡到輸入透鏡的距離為1.5 m,調節過程中,注入光束在入射透鏡上的位移遠小于1 mm,可忽略不計。
根據上述計算結果可知,光斑的最大偏移角度小于0.007°時,注入預放大器的光斑則不會被切。將光路偏移角度換算為調節鏡架的偏轉角度。預放大器輸入、輸出調節鏡架的尺寸如圖3所示,調節鏡架頂絲與固定點之間的距離為44 mm,設調節鏡架旋轉角度為β,頂絲移動距離為L,當入射光束偏轉α角度時,根據平面幾何可知2β等于α,則:
L=44sin(0.003 5°)=2.7×10-3mm

圖3 預放大器輸入、輸出調節鏡架的尺寸Fig.3 Sketch drawing of mirror holder for input/output beam of preamplifier
二維鏡架的調節是由控制器驅動步進電機,進而帶動頂絲旋轉實現的。頂絲螺紋間距為0.25 mm,轉動1圈需200個驅動脈沖。控制器可將驅動脈沖信號細分為2的倍數,選擇控制器為4細分時,頂絲每行進1步的位移R為:
設調節鏡架螺桿移動1步長R時,前窗鏡上光斑移動的距離為2Δx,由近似三角形公式可得:
則:
0.085 mm
由此可得,調節鏡架移動1步長前窗鏡上光斑移動的距離2Δx=0.085×2=0.17 mm,精度遠高于用目視方法手工調節時的精度(約2 mm)。
2 預放大器輸入、輸出自動準直系統的建立
自動準直系統光路控制流程如圖4所示。準直光源采用實際光路光源,CCD監測預放大器輸出全反鏡上的光斑,圖像傳送到計算機從而判斷光斑是否缺損,由計算機軟件利用重心法計算偏移量,計算機按照計算值控制步進電機控制器,再由控制器控制步進電機的調節步長及方向,即達到控制預放大系統輸入全反鏡的目的。反復上述調節過程,直至計算機判斷監測光斑無缺損位置,即完成此段光路的自動準直。圖5為CCD監測預放大器輸出光斑的圖像。

圖4 自動準直系統光路控制流程Fig.4 Flow chart of automatic collimation system

圖5 預放大器輸出光斑的圖像Fig.5 Beam profile on output mirror of preamplifier
3 預放大器輸入、輸出自動準直系統的測試結果
根據預放大器輸入、輸出特性,完成了其自動準直系統設計,建立了一套光路自動準直裝置。該裝置輸入端選用步長為1.0 μm步進電機,電動調節鏡架的頂絲選用0.25 mm的細牙螺紋。控制器調節精度選用4細分,預放大器輸入、輸出的調節鏡架移動1步長的距離為0.085 mm時,前窗鏡上光斑移動的距離為0.17 mm。
考慮到國產步進電機控制系統的回程差較大,對搭建的系統進行了整體測試。在輸入全反鏡旋轉、俯仰角度調節角度<0.3°時,系統相對誤差小于5%,調節精度滿足精確調節的實驗要求。
4 結論
為了保障六束激光聚焦疊加并穩定精準地照射到靶面上,在天光一號裝置上開展了適合其激光參數及光路特性的自動準直技術研究。研究發現,采用傳統的光路自動準直方法,由于主光路光源的波長與引入的輔助光源的波長相差過大,造成光束傳輸路徑無法精確重合。
本文建立了預放大器光路自動準直系統,實現了快速、高精度光束的調節,驗證了自動準直方案的可行性,調節精度達到0.17 mm,系統相對誤差小于5%,實現了快速、高精度光束調節的目標。本文為天光一號KrF準分子激光裝置后期開展MOPA光路全自動化準直系統提供了可行的實驗方案與思路。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
