光伏幕墻智能清掃系統路徑的規劃與實施
2019-06-12 06:37:48周秀珍
水電站設計 2019年2期
周 秀 珍
(長江工程職業技術學院, 湖北 武漢 430212)
0 前 言
光伏組件的清潔度直接影響了光伏板發電效率,定期清掃光伏板能有效提高光伏板發電板的電能輸出。目前光伏板清洗主要采用人工、工程車、自由行走的機器人等方式。由于光伏幕墻多為垂直,這些方式對光伏幕墻的清洗并不實用。目前針對光伏幕墻多為人工水洗,但該方式不僅危險系數高,而且成本也高。本文首先分析了光伏幕墻的形狀類型,然后針對不同的類型光伏幕墻進行智能清掃路徑的規劃,并進行詳細研究設計。
1 光伏幕墻智能清掃路徑的規劃
1.1 光伏幕墻的類型
光伏幕墻光伏板的鋪設通常分為兩種典型的情況:整面墻鋪設(見圖1)和帶孔鋪設(見圖2)。

圖1 整面鋪設光伏幕墻

圖2 帶孔鋪設光伏幕墻
整面鋪設幕墻通常比較規則,由于光伏板和墻體形狀的限定,以及采光的要求,通常為矩形。帶孔鋪設幕墻通常也是在整面墻上鋪設,但建筑的墻面上涉及到窗和門,必須把門和窗的部分留空,只在墻面其它地方鋪設光伏板。
不管是整面鋪設還是帶孔鋪設清掃的原則均是全面覆蓋。
1.2 清掃路徑規劃
由于本清掃裝置主要是縱向運動,結合光伏幕墻的特點,主要采用了橫向分區的原則對清掃路徑進行設計。
對于整面鋪設的幕墻可以直接將鋪設區域分成等寬等高的清掃區,清掃裝置主要做上下移動,下行移動的時候清掃,上行移動的時候返回,再橫向移動到下一個區域,重復上述過程,直到最后一塊,清掃結束,如圖3所示。
對于帶孔鋪設的幕墻,則需要進行二次分區,如圖4所示。先按照幕墻分成有孔區和無孔區,有孔區由于中間留設門和窗的位置,因此中間會存在沒有鋪設光伏部件的空檔。因此清掃的區域不再是幕墻頂端到底端,該區域的高度會根據實際門窗的位置確定。因此,清掃的區域不再是幕墻頂端到底端,該區域的高度會根據實際門窗的位置確定。
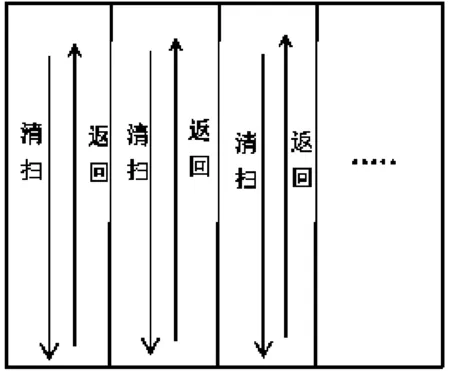
圖3 整面鋪設清掃路徑

圖4 帶孔鋪設清掃路徑
進行完一次分區后,不管是有孔區還是無孔區都可以看成是一個整塊的區域,可直接采用整面幕墻的分區方法將清掃區域分成等寬等高的區域進行清掃。
二次分區后的清掃路徑和整面幕墻的清掃路徑相同。
一次分區中,完成無孔區清掃后,清掃裝置返回頂端,準備進入有孔區進行清掃,裝置首先直接下行找到第一個有孔區,進行區域清掃直到第一個有孔區清掃完成,接著橫向回行到有孔區最左邊,然后再下行找到第二個有孔區,重復剛才過程進行清掃,直到完成清掃到有孔區最底端,然后再直接上行返回頂端。準備進入無孔區進行清掃,繼續重復,直到整面墻清掃完成。
2 光伏幕墻智能清掃路徑的研究和設計
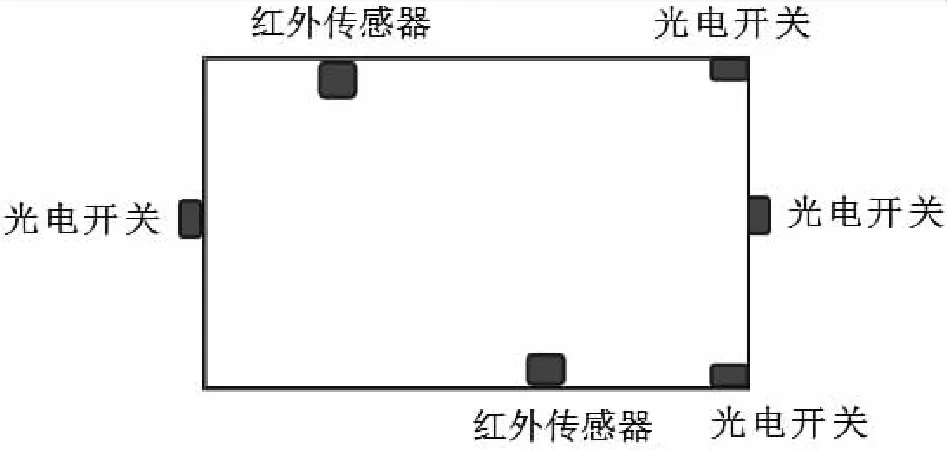
圖5 清掃塊傳感器分布
2.1 清掃區域的智能識別
本系統通過在清掃塊的四周安裝不同的傳感器,實現對清掃塊的清掃區域情況進行智能識別(見圖5)。清掃塊的上下左右四側分別安裝了向下的光電開關,用于檢測下面是否有光伏組件,如果有光伏組件,光電信號發射出去之后被反射回來接收,開關動作;如果沒有組件,則直接無返回放射信號返回,開關不動作。根據這個原理,如果左側開關不動作,右側開關動作,則說明清掃塊在無孔清掃區的最左邊,如果左側開關動作,右側開關不動作,則說明清掃塊在無孔清掃區的最右邊;如果上側開關不動作,下側開關動作,則說明清掃塊在無孔清掃區的最上邊,如果上側開關動作,下側開關不動作,則說明清掃塊在無孔清掃區的最下邊;如果在上行返回的過程中,右側開關一會動作,一會不動作,則說明清掃塊處于帶孔鋪設區域的無孔區的右邊緣,返回后,準備進入有孔區的清掃路徑。如果在有孔區的上邊緣,清掃塊向右橫向運動時,上側開關由不動作變為動作,說明進入了有孔區的右邊緣,有孔區清掃完成,可以下行到下邊緣,左行返回到左邊緣,再下行進入下一個有孔區清掃。清掃塊的上下兩側還安裝了向外的紅外傳感器,用于檢測清掃塊是否到了整個鋪設面的最上端和最下端。清掃區位置見表1。
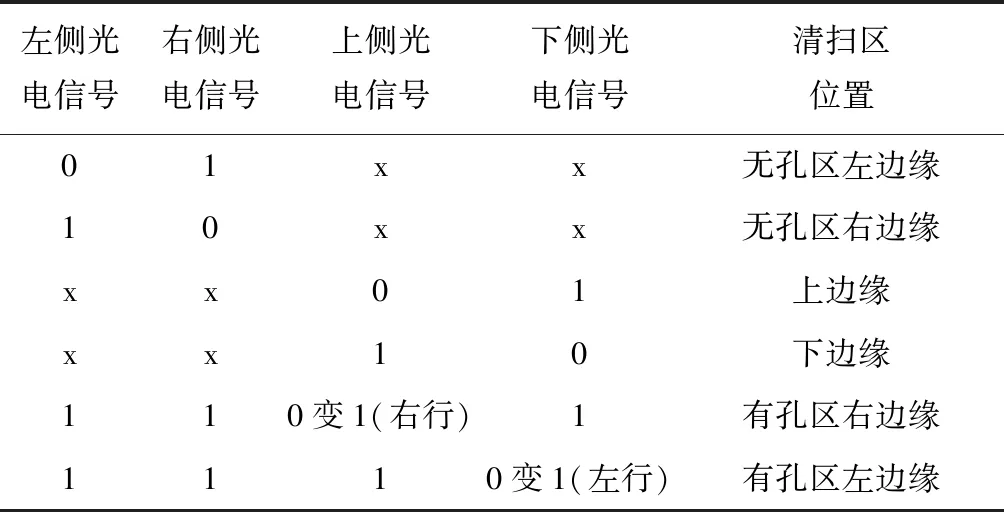
表1 清掃區位置對照
2.2 智能清掃的的設計
可將6個傳感器的信號作為輸入信號傳送給PLC,PLC根據不同的信號判斷清掃區的開始、結束和返回。由于兩種類型的光伏幕墻清掃程序不一樣,為了提高清掃效率,在清掃系統增加一個開關信號表示幕墻的類型,如果開關為“OFF”,則是整面鋪設幕墻,反之為帶孔鋪設幕墻。PLC的智能清掃程序主要分為無孔區清掃子程序,有孔區清掃子程序和主程序,控制流程如圖6~8所示。

圖6無孔區清掃控制流程示意

圖7有孔區清掃控制流程示意
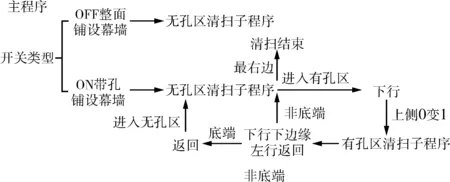
圖8 主程序控制流程示意
3 結 語
本文所設計的光伏幕墻的智能清掃系統的清掃路徑,能比較好地完成清掃區域的識別,針對不同類型的光伏幕墻進行智能清掃,清掃路徑也實現了光伏組件全覆蓋。但清掃路徑的設計只考慮了比較典型和規則的兩種光伏幕墻,對于不規則的幕墻清掃則需要根據具體實際設計更復雜的清掃路徑。
猜你喜歡
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
