基于相關性相位提取的超聲電機頻率控制技術
2019-06-11 08:27:47安國慶安孟宇楊少銳劉慶瑞李爭
河北科技大學學報 2019年2期
安國慶 安孟宇 楊少銳 劉慶瑞 李爭
摘要:為了解決溫度和負載的變化容易引起超聲電機轉速波動,以及基于轉速反饋的閉環控制因轉速傳感器安裝體積和成本在某些特種場合應用受限的問題,提出一種基于相位差信息反饋的頻率閉環控制方法:首先,根據電機各類相位差對溫度和負載變化的敏感程度,優化選擇了相位差反饋量的類型;其次,針對系統機械噪聲以及驅動器諧波對相位差計算結果的影響,利用改進的相關性相位提取方法準確提取驅動電壓和孤極電壓的基頻相位差信息;最后,分別就超聲電機運行過程中溫度和負載變化的情況,給出了相應的頻率閉環控制方案。實驗結果表明,所提出的方法能有效降低溫度以及負載變化導致的轉速波動,可提升電機所在系統的轉速穩定性。由于其只需采樣兩路電壓信號,故易于工程實現。
關鍵詞:電機學;超聲電機;相位差;閉環控制;相關性分析
中圖分類號:TM3599文獻標志碼:A
Abstract:In order to solve the problems that the speed of ultrasonic motor is usually affected by the changes of temperature and load, and that due to installation volume and cost of the speed sensor, the closed-loop control based on speed feedback is often limited in some special applications, a frequency closed-loop control method based on phase difference feedback is introduced. Firstly, the type of phase difference feedback quantity is optimally selected according to the sensitivity of different motor phase differences to the temperature and load change; secondly, aiming to the interference of mechanical and harmonic noises on phase difference calculating result, the correlation phase extraction method is proposed to improve the accuracy of phase difference between driving voltage and monitor electrode voltage; lastly, the corresponding frequency closed-loop control scheme is given according to the changes of temperature and load change, respectively. Experiment results indicate that this method can reduce the speed fluctuations caused by the changes of temperature and load, and improve the speed stability of motor system. Because only two voltage signals are needed to be recorded, this method is easy for implementation.
Keywords:electric machinery;ultrasonic motor;phase difference;closed-loop control;correlation analysis
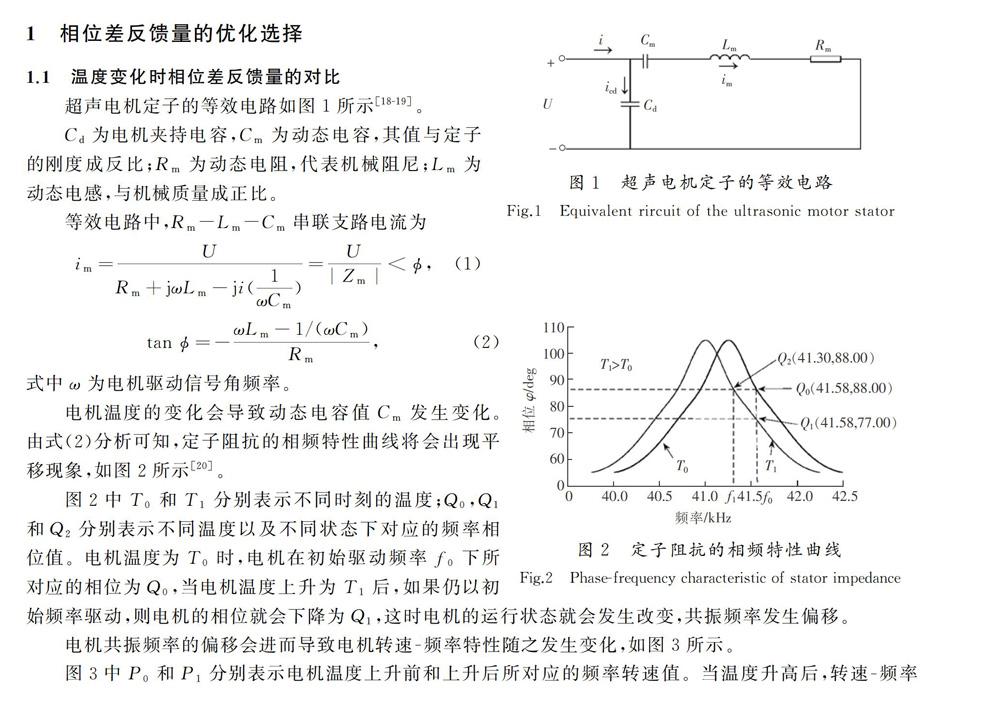
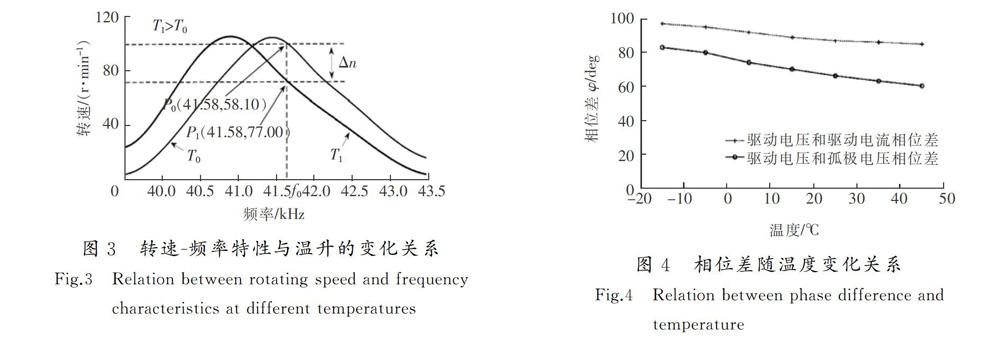
超聲電機具備低速高轉矩、快速響應、無電磁噪聲、斷電自鎖等優良特性[1-2],在醫療設備、光學儀器、機器人驅動,航空航天以及新型軍事裝備等領域應用廣泛[3-6]。當電機溫度發生變化時,其諧振頻率將會發生偏移[7]。當驅動頻率不能很好地跟蹤諧振頻率變化時,會導致其轉速下降,效率降低[8]。此外,超聲電機的機械特性相對偏軟,當轉軸上的負載變化時,其轉速會產生較大波動,大大降低了電機所在系統的可靠性[9]。基于轉速監測的閉環反饋控制可以較好地補償轉速的變化,但轉速傳感器一方面增加了超聲電機所在系統的體積,另一方面使高精度的編碼器增加了系統成本[10]。近年來,基于非轉速反饋的超聲電機頻率閉環控制技術成為了許多學者研究的熱點,其中基于孤極電壓反饋法和基于驅動電壓驅動電流鎖相法逐漸成為了頻率跟蹤控制的主流[11-13]。文獻[14]提出了基于孤極反饋的跟蹤方法,推導出了行波型超聲電機定子上孤極傳感器反饋電壓與其轉速之間的關系,并利用這一關系控制了電機的轉速。文獻[15]提出了基于驅動電壓反饋的頻率跟蹤技術,使驅動電壓恒定讓電機運行趨于穩定,但是單純以孤極電壓或驅動電壓作為反饋信號很難同時滿足效率、轉矩等指標要求。文獻[16]提出基于驅動電壓和驅動電流相位差反饋的方法實現頻率跟蹤控制,設計了超聲電機相位差負反饋閉環控制器,改善了溫度等外界因素變化對電機運行轉速波動的影響,但由于超聲電機的信號頻率較高,電流信號相對于電壓信號不易測取而導致反饋誤差容易偏大。文獻[17]提及驅動電壓和孤極電壓相位差與定子阻抗特性的變化具有一致性,且被監測信號同為電壓信號,測取方法簡單易于工程實現,具有較大的研究空間。
技術本文針對超聲電機多應用于特種場合的實際情況,為避開編碼器給超聲電機控制系統帶來的安裝體積和成本問題,擬選用相位差信息作為反饋量進行頻率閉環控制。根據電機溫度及負載變化時電機不同相位差信息的變化規律,優化選擇反饋量,并提出一種能夠準確提取基頻相位差信息的方法,以實時調節驅動頻率,補償電機溫度及負載變化對電機轉速帶來的不良影響。
1.1溫度變化時相位差反饋量的對比
1.2負載變化時相位差反饋量的對比
型號為TWUSM-60的行波型超聲電機測得的機械特性如圖5所示。
超聲電機廠家一般推薦按最大轉矩為1.5倍實際負載轉矩的原則進行電機選型。由圖5可知,電機在實際負載(2/3Tmax)處的轉速變化率為38%。可見超聲電機的機械特性較軟,且呈非線性變化,轉速易受負載波動的影響,使得超聲電機所在系統的可靠性大大降低。
為探究電機相位信息隨負載的變化規律,開環狀態下,在最大轉矩范圍內改變負載,觀察驅動電壓和驅動電流的相位差以及驅動電壓和孤極電壓的相位差隨負載變化趨勢,如圖6所示。
2相關性相位提取法
在基于相位差反饋的頻率閉環控制中,準確提取兩信號基頻相位差是信號檢測的關鍵。但一方面超聲電機的孤極電壓為陶瓷晶體利用壓電效應產生的電壓信號,常夾雜有電機所在機械系統的背景振動噪聲;另一方面電機驅動器由于變頻需求含有大量開關器件,產生較多的諧波噪聲。采用傳統的“過零法”提取相位差信息誤差較大。針對以上問題,利用改進的相關性相位提取法,以獲取驅動電壓和孤極電壓的基頻相位差信息,具體方法如下。
3控制系統構建及實驗方案
3.1控制系統構建
3.2電機溫度變化時的實驗方案
步驟1:記錄在某初始溫度下驅動電壓和孤極電壓的相位差信息,并將其作為相位差設定值;
步驟2:實時采集驅動電壓和孤極電壓信號,利用相關性相位提取法實時計算兩者相位差;
步驟3:將相位差計算值和設定值比較,計算偏差值。此時對頻率自動調節進行閉環控制,當相位差計算值大于設定值時,提升驅動頻率,減小相位差;當相位差計算值小于設定值時,降低驅動頻率,增大相位差,直至偏差量小于設定閾值為止。
3.3電機負載變化時的實驗方案
4實驗結果及分析
選用型號為TWUSM-60的行波型超聲電機作為被控對象,選用配套的驅動器進行變頻控制;將磁粉制動器作為其負載,利用張力控制器進行負載調節;轉矩轉速傳感器型號為CYT-303,可實時監測電機的轉矩與轉速。采用自制的信號調理電路,信號采集卡型號為Handyscope HS4,電機驅動電壓峰峰值為315 V,所構建的超聲電機實驗平臺如圖8所示。
4.1溫度變化時閉環反饋控制結果
4.1.1環境溫度變化時閉環反饋控制結果
測得電機在-15 ℃時,驅動頻率為41 200 Hz,驅動電壓和孤極電壓初始相位差為83.4°,本實驗將此作為相位差初始設定值。利用高低溫交變試驗箱模擬環境溫度的變化,在電機允許范圍內對溫度進行連續調節,在此過程中進行閉環控制。開環與閉環時轉速的變化情況如圖10所示。
由圖10可知,當溫度由-15 ℃變化至45 ℃時,開環控制情況下,電機的轉速由100 r/min下降至62 r/min;閉環控制情況下,電機的轉速由100 r/min下降至95 r/min,轉速速降由38%降至5%。由此可見,基于驅動電壓和孤極電壓相位差反饋的閉環控制方法,有效地降低了溫度對電機的影響。
4.1.2電機溫升變化時閉環反饋控制結果
實際上,超聲電機在運行過程中由于各種損耗的存在會產生發熱的情況。實驗在20 ℃的室溫環境下令電機空載運行。利用紅外測溫的方法監測電機連續運行時,電機定子表面溫度隨時間的變化情況,如圖11所示。
由以上實驗結果可知,電機的表面溫度由25 ℃變化到39.1 ℃。開環控制情況下,電機的轉速由75 r/min下降至65 r/min;閉環控制情況下,電機的轉速由75 r/min下降至72 r/min,轉速速降由13.3%降至4%。由此可見,基于驅動電壓和孤極電壓相位差反饋的閉環控制方法,有效地降低了電機自身溫升對轉速的影響。
4.2負載變化時閉環反饋控制結果
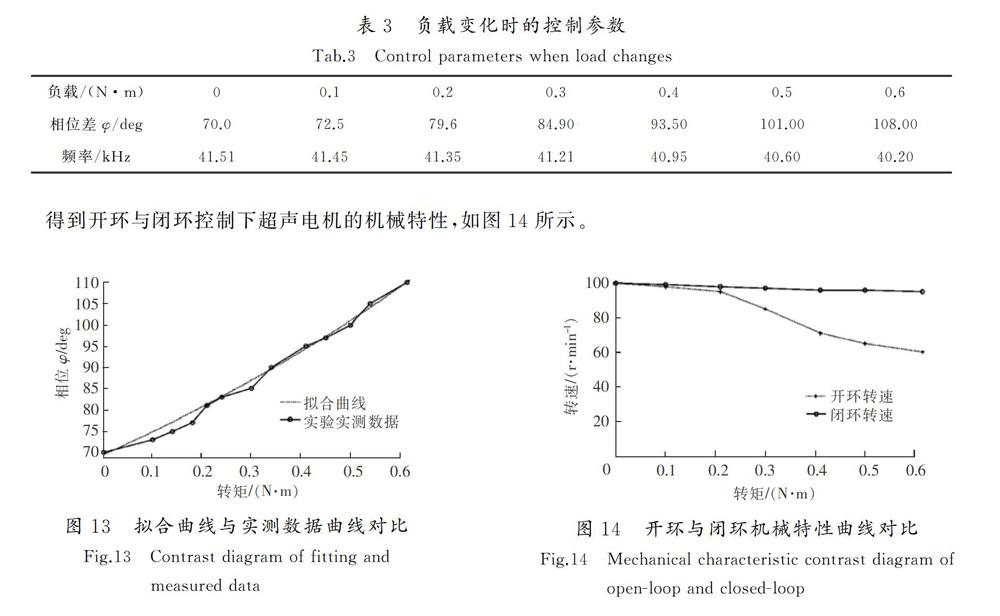
經測試,電機的最大轉矩為0.85 N·m。調節負載分別至空載、輕載、中載以及重載4個等級,分別通過改變驅動器頻率,將轉速調至空載轉速n0。實驗過程中在4個負載等級之間增加了3組數據以提高擬合精度。相應原始數據如表2所示。
由圖14可知,電機加載到0.6 N·m時,開環情況下,轉速由空載時的100 r/min降至60 r/min,轉速變化率為40%;閉環情況下,轉速由空載時的100 r/min降至95 r/min,轉速變化率為5%;因此,基于驅動電壓與孤極電壓相位差反饋的閉環控制,能夠降低由于負載變化而引起的轉速波動,提高了電機對負載變化的抗擾能力。
5結語
1)驅動電壓與孤極電壓的相位差相較于驅動電壓和驅動電流相位差對溫度變化以及負載變化更為敏感,可將前者作為反饋量用于超聲波電機的頻率閉環控制。
2)改進的相關性相位提取法可有效濾除機械噪聲和驅動器諧波對相位差計算結果的影響,提高相位差提取和閉環控制準確度。
3)基于驅動電壓和孤極電壓相位差反饋的頻率閉環控制方案可降低環境溫度以及負載變化對電機轉速輸出的影響,提高電機所在系統的穩定性。
4)本文對超聲波電機頻率控制技術的研究仍然存在許多不足之處。相關性相位算法在改進以及創新方面還有很大的提升空間,超聲波電機在實際應用中會運行在各種復雜環境中,對電機閉環控制的要求會更多,難度也會大大增加。今后將在這些方面繼續做深入的研究。
參考文獻/References:
[1]牛子杰,孫志峻,陳超,等. 基于響應面模型與自適應遺傳算法的中空型行波超聲電機柔性轉子結構優化[J]. 中國電機工程學報,2014,34(30):5378-5385.
NIU Zijie, SUN Zhijun, CHEN Chao, et al. Optimization of the rotor structure of a hollow traveling wave ultrasonic motor based on response surface methodology and self-adaptive genetic algorithm[J]. Proceedings of the CSEE, 2014, 34(30): 5378-5385
[2]張軍,時運來,梁大志,等. 直線超聲電機驅動精密二維定位平臺系統[J]. 中國電機工程學報,2014,34(18):2960-2966.ZHANG Jun, SHI Yunlai, LIANG Dazhi, et al. A 2-D precision positioning table system driven by linear ultrasonic motors[J]. Proceedings of the CSEE, 2014, 34(18): 2960-2966.
[3]夏長亮,徐紹輝,史婷娜,等. 基于遺傳算法的超聲波電機模糊自適應速度控制[J]. 中國電機工程學報,2003,23(3):99-103.XIA Changliang, XU Shaohui, SHI Tingna, et al. Fuzzy adaptive speed control for ultrasonic motor based on genetic algorithm[J]. Proceedings of the CSEE, 2003,23(3):99-103.
[4]STEPANENKO D A,MINCHENYA V T.Development and study of novel non-contact ultrasonic motor based on principle of structural asymmetry[J]. Ultrasonics, 2012,52(7):866-872.
[5]李爭,郭鵬,高世豪.環形超聲波電機的特性分析與實驗研究[J].微電機,2018,51(5):17-21.LI Zheng, GUO Peng, GAO Shihao. Characteristic analysis and experimental study of ring ultrasonic motor[J]. Micro motors, 2018, 51(5): 17-21.
[6]張龍.基于DSP的行波型超聲波電機驅動控制系統的研究[D].杭州:浙江大學,2004.ZHANG Long. Research on Drive Control System of Traveling Wave Ultrasonic Motor Based on DSP[D]. Hangzhou:Zhejiang Univer-sity, 2004.
[7]王光慶,郭吉豐.超聲波電機頻率-溫度特性研究[J].電機與控制學報,2008,12(6):675-679.WANG Guangqing, GUO Jifeng. Research on the frequency-temperature characteristics of the ultrasonic motor[J]. Electric Machines and Control, 2008,12(6): 675-679.
[8]曾勁松,姚志遠,趙淳生.超聲電機中的非線性現象研究[J].中國機械工程,2006,17(10):1047-1051.ZENG Jinsong, YAO Zhiyuan, ZHAO Chunsheng. Research on non-linear phenomena in ultrasonic motor[J]. China Mechanical Engineering, 2006,17(10): 1047-1051.
[9]陳勝,雷向紅.超聲電機的阻抗角特性及其控制技術研究[J].機電信息,2013,15:94-95.CHEN Sheng, LEI Xianghong. Research on impedance angle characteristics of ultrasonic motor and its control technology[J]. Journal of Mechanical And Electrical Information, 2013, 15:94-95.
[10]李華峰,丁慶軍,陳超.超聲電機啟動可靠性研究[J].中國電機工程學報,2013,33(9):138-145.LI Huafeng, DING Qingjun, CHEN Chao. Research on startup reliability of ultrasonic motors[J]. Proceedings of the CSEE, 2013, 33(9): 138-145.
[11]陳志華,趙淳生.一種簡單實用的超聲電機頻率跟蹤控制技術[J].壓電與聲光,2003,25(2):149-151.CHEN Zhihua, ZHAO Chunsheng. The control of resonant tracking of ultrasonic motor[J]. Piezoele Ctrics & Acoustooptics, 2003,25(2): 149-151.
[12]IZUNO Y, HOJO M, NAKAOKA M. Software-based adjusting P-I gain controller for speed-tracking servo system using traveling-wave type ultrasonic motor[C]// IEEE Industry Applications Society Annual Meeting.[S.l.]: Denver,1994.
[13]趙淳生,朱華.超聲電機技術的發展和應用[J].機械制造與自動化,2008,37(3):1-9.ZHAO Chunsheng, ZHU Hua. Development and application of ultrasonic motors technologies[J]. Machine Building & Automation, 2008,37(3): 1-9.
[14]陳志華,趙淳生,黃衛清.行波型超聲電機速度控制技術的研究[J].壓電與聲光,2005,27(4):427-430.CHEN Zhihua, ZHAO Chunsheng, HUANG Weiqing. Research on the speed control techniques of a traveling-wave-type ultrasonic motor[J]. Piezoelectrics & Acoustooptics, 2005,27(4): 427-430.
[15]王文浩,郭吉豐,胡錫幸,等.驅動電壓跟蹤的超聲波電機頻率自適應技術[J].中國電機工程學報,2010,30(27):36-41.WANG Wenhao, GUO Jifeng, HU Xixing,et al. A adaptive frequency tracking control strategy for ultrasonic motor using the driving voltage[J]. Proceedings of the CSEE, 2010, 30(27): 36-41.
[16]甘云華,金龍,胡敏強,等.基于鎖相環的超聲波電機頻率跟蹤控制技術[J].哈爾濱理工大學學報,2009,14(2):66-70.GAN Yunhua, JIN Long, HU Minqiang, et al. Frequency tracking technology of ultrasonic motor based on phase-locked loop[J]. Journal of Harbin University of Science and Technology, 2009, 14(2): 66-70.
[17]祖家奎,趙淳生.行波型超聲電機頻率自動跟蹤控制技術評述[J].微電機,2004,37(6):47-50.ZU Jiakui, ZHAO Chunsheng. A review for frequency tracking control techniques of traveling wave ultrasonic motors[J]. Micro Motors, 2004,37(6): 47-50.
[18]SHI Jingzhuo,LV Lin,ZHANG Yu. Dynamic takagi-sugeno model for the control of ultrasonic motor[J]. Journal of Control Science and Engineering, 2011:1-9.
[19]顧菊平,秦申蓓,石斌,等.超聲波電機測試技術的研究[J].電工技術學報,2003,18(1):21-26.GU Juping, QIN Shenbei, SHI Bin, et al. Research on testing techniques of ultrasonic motors[J]. Transactions of China Electrotechnical Society, 2003,18(1): 21-26.
[20]甘云華,金龍,王心堅,等.超聲波電機自激振蕩驅動電路的變頻控制特性[J].中國電機工程學報,2008,28(9):93-97.GAN Yunhua, JIN Long, WANG Xinjian, et al. Characteristic of variable frequency control of self-oscillating driving circuit for utrasonic motor[J]. proceedings of the CSEE, 2008, 28(9): 93-97.
[21]AN Guoqing, LI Hongru. Stator and rotor faults diagnosis of squirrel cage motor based on fundamental component extraction method[J]. International Journal of Rotating Machinery, 2017: Article ID 1576381.
