基于橫向光電效應的火炮身管直線度檢測系統研究
2019-06-11 11:35:28楊璐王惠源
中國測試 2019年4期
楊璐 王惠源
摘要:為實現對火炮身管直線度的量化檢測,設計一種測量方法采用橫向光電效應、內膛定位使用雙滑塊式自定心機構、電氣控制使用PLc、檢測軟件基于LabVIEw的火炮身管直線度檢測系統。在檢測軟件中通過傾角傳感器采集數據對位敏傳感器(PsI))位置進行修正后,PsD與位移傳感器輸入計算機中的數據根據直線度計算理論計算得到身管直線度的實際變化情況,最后采用最小二乘法對其誤差進行評定。系統集精密機械技術、傳感器技術及光電檢測技術為一體,其中PsD的重復檢測精度達到5um,檢測元件在定心精度為±7.86um的機械結構裝載下實現火炮身管直線度的高精度檢測,可對我軍口徑在122~155mm范圍內的約25種制式火炮身管進行檢測。
關鍵詞:直線度檢測;光電檢測;橫向光電效應;自定心機構;誤差評定
中圖分類號:TP27;TJ30文獻標志碼:A 文章編號:1674-5124(2019)04-0098-106
0引言
火炮身管會由于自身重力、制造過程中的加工工藝以及彈丸發射過程中的熱脹冷縮而出現管體彎曲的現象,當彎曲到一定程度時會影響彈丸的飛行軌跡、打擊精度以及密集度,嚴重時會出現炸膛現象威脅操作人員的生命安全,因此不管在制造和維護過程中對于身管直線度的檢測都是必檢項。檢測人員在實際工作過程中會將直度徑規插人身管中,通過是否能夠順利通過內膛來判斷身管現狀,缺乏自動化的檢測手段和數據化的評判標準。隨著激光技術、傳感器技術以及計算機技術的快速發展,相繼出現了四象限光電池法、CCD法、PSD法在內的諸多火炮身管直線度檢測方法,PSD檢測法由于其可以實現光斑重心的自動確定以及更高的反應速度和檢測精度成為更優的檢測方案。針對我軍裝備制式火炮口徑繁多的特點,設計一種以PSD作為位置測量元件、激光束作為準直基線、PSD裝載裝置采用彈性自定心方式的火炮身管直線度檢測系統。
1系統檢測原理
PSD作為檢測系統的核心部件,是一種基于橫向光電效應的半導體元件,一般做成P+I+N的結構形式,x軸方向的剖面圖如圖1所示,當激光器光束照到PSD上時,在受光位置會產生與光能量等比例的電子一空穴對流過P層電阻,P層電阻的x軸和y軸分別設置有兩個電極,分別輸出光電流I1、I2、I3:I4,根據輸出電流反比于光斑位置到各電極間的距離有:
PSD輸出的是與光斑位置位置有關的電流信號,需要對應的數據處理板將電流信號轉變為數字信號來得出受光位置的坐標。PSD處理板由和、差分放大器、前置信號放大器和加、減、乘、除運算電路組成,光斑位置坐標計算公式為:
身管直線度是指身管實際軸線與理論軸線在其每個截面上的距離,實際軸線為每個截面中心點的連線,理論軸線為炮口和炮尾截面中心的連線。
系統將激光發射器借助坡膛定位規裝于炮尾的坡膛中,通過定位規來保證激光器光源點與其所處炮尾截面中心重合;將PSD裝于彈性自定心機構前端面中心位置,通過定心機構保證PSD原點始終與所處身管截面中心重合并在爬行器的帶動下從炮口開始沿身管軸線爬行。在檢測開始前調節激光發射器激光的入射角度使光束打到炮口處PSD的光斑位于其原點位置,這樣系統就認為激光器發出的光束即為身管的理論軸線,而自定心機構能保證PSD所處截面圓心與其原點重合,那么在身管任意截面上激光照射點與PSD坐標原點間的距離即為身管直線度的值,設PSD輸出的位置坐標為(xi,yi),則該截面上的直線度pi為:
2檢測系統方案
火炮身管直線度檢測系統總體方案如圖2所示,主要由兩個分系統組成:一個是直線度檢測硬件分系統,包括機械部分、光學部分和電氣控制部分,完成采集計算身管直線度相關數據的工作;一個是直線度檢測軟件分系統,用于將采集數據進行分析計算得到身管直線度的實際情況并對其進行誤差評定,從而實現火炮身管直線度的量化檢測。
2.1硬件分系統設計
2.1.1機械部分設計
機械部分的任務是保證檢測元件定位關系準確的前提下帶動PSD沿身管軸線運動,完成收集身管直線度相關數據的工作,由自定心機構、爬行器、激光器坡膛定位規、炮口導引套筒和校準單元組成。
自定心機構結構如圖3所示,滾輪架上加裝3個在兩端具有角接觸球軸承的滾輪,滑套與定位套筒之間通過定位精度較高、只允許自由移動而不能自由轉動的H6/g5間隙配合連接,滾輪架、兩調節連桿、兩滑套在平面上構成一雙滑塊機構,兩滑套上均勻地開有4個連接調節連桿的轉動銷孔,4套雙滑塊機構互成90°地布置在與定位套筒同心的圓周上,在滑套與定位套筒端面之間加裝彈簧。自由狀態下,4個滾輪架上的滾輪所形成的圓周直徑為160nm,當裝置進入身管后,自定心機構會在內膛壁作用下徑向同步壓縮至目標口徑,在滿足系統通用性要求的同時保證了良好的定心效果。
爬行器帶動PSD在身管中行進的過程中難免會發生坐標軸在位置上的傾斜,尤其是在線膛中檢測時由于膛內存在若干條由螺旋線組成的膛線,爬行器會由于受到膛線切向力的作用在姿態上發生傾斜,因此設計在直行驅動裝置的頂端加裝一套與上述結構相同的雙滑塊機構。當系統運行時,滾輪抵在身管上壁,通過彈簧施加給爬行器一個向下的正壓力,從而增加了車輪與身管內壁間的摩擦力,這樣就通過增加摩擦力的方法克服了切向力。
將PSD固定于自定心機構前端面的中心位置,傾角傳感器裝于定位套筒內腔平行于水平面的安裝面上,位移傳感器則通過拉繩頭部與爬行器后端面采用外螺紋連接。爬行器通過圓錐齒輪機構改變步進電機的傳動方向并帶動后輪軸轉動,后車輪的轉動將推動自定心機構和爬行器在身管中直行,結構如圖4所示。
坡膛激光器定位規由定位規本體、推桿與緊定螺釘組成,定位規校正示意圖如圖5所示,在檢測前將規體插人校準筒中,根據激光器打在透明坐標指示板的光斑坐標對其位置通過緊定螺釘進行調整,定位工作完成后通過推桿將其插入炮尾坡膛即可。激光發射器帶有入射角度調節旋鈕,可對其進行調節使激光束打到炮口PSD的坐標原點處,系統將認為該光束即為檢測身管理論軸線。
對炮口處進行檢測時由于檢測裝置并沒有完全進人身管,因此需要一個導引套筒引導檢測裝置完成炮口處的檢測并保證定位關系的準確性。考慮到身管炮口通過一個左旋的螺紋與炮口制退器連接,因此同樣可以利用這個螺紋作為導引套筒與身管之間的連接。
2.1.2光學部分設計
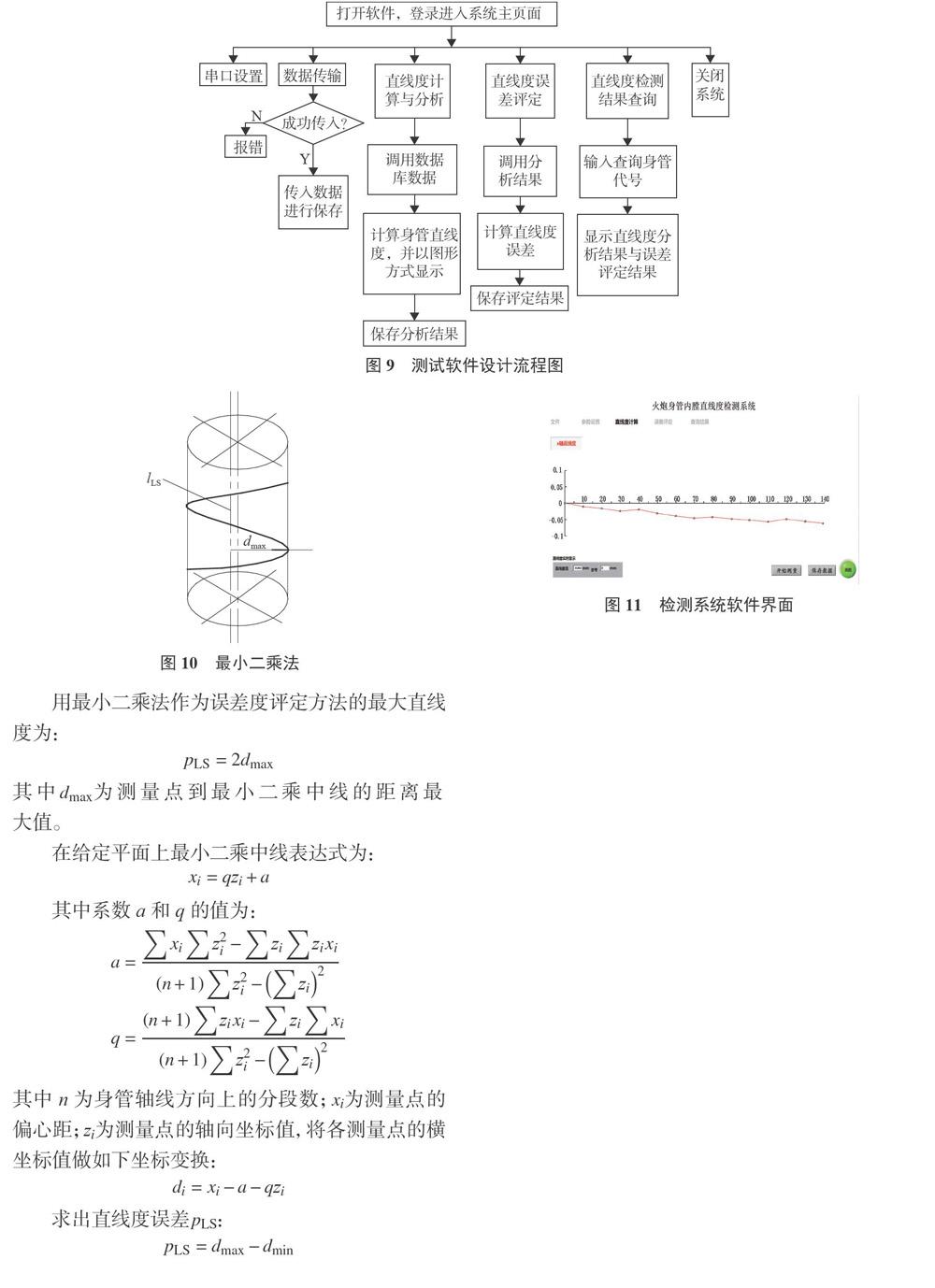
PSD是一種基于橫向光電效應的半導體器件,具有靈敏度高、分辨率高和響應速度快的特點,系統選用PSD型號為PSD400-LC,有效感光面為20x20mm,推薦光斑的直徑為0.5-16mm,絕對位置誤差5Inn,響應時間0.6us,光譜響應曲線如圖6所示。
激光發射器選用型號為FP-LR-635,激光波長635nm,功率5mW,光斑形狀為圓形,發散角為0.07mrad,激光器在10m處的光斑僅有1mm,在沒有激光準直儀的情況下就可以達到良好的準直效果并可以調節激光入射角度。
2.1.3電氣控制部分設計
PSD輸出的是與光斑位置有關的電流模擬信號,需要處理電路板將模擬信號轉換為數字信號,其具有由和、差分放大器、前置信號放大器和加、減、乘、除運算電路,原理圖如圖7所示。
檢測系統電氣控制原理如圖8所示:爬行器的步進電機驅動器與PLC采用陽極共接法連接,PLC發出脈沖信號并將其傳遞給驅動器,驅動器根據脈沖信號實現對電機方向、轉速、位置的控制;PSD發出的電流信號經過處理電路板轉換為光斑位置坐標的數字信號并傳人PLC,存于PLC的內部數據寄存器中;位移傳感器采集到PSD軸向位置變化的數據后輸出模擬信號,模擬信號通過A/D信號轉換模塊輸入PLC并保存在數據寄存器中;傾角傳感器采集到PSD角度變化的數據后產生模擬信號,模擬信號通過A/D信號轉換模塊輸入PLC并保存在數據寄存器中;PLC通過RS-232數據通信接口與計算機通信,將采集到的數據發送到上位機軟件中進行下一步的處理。
2.2軟件分系統設計
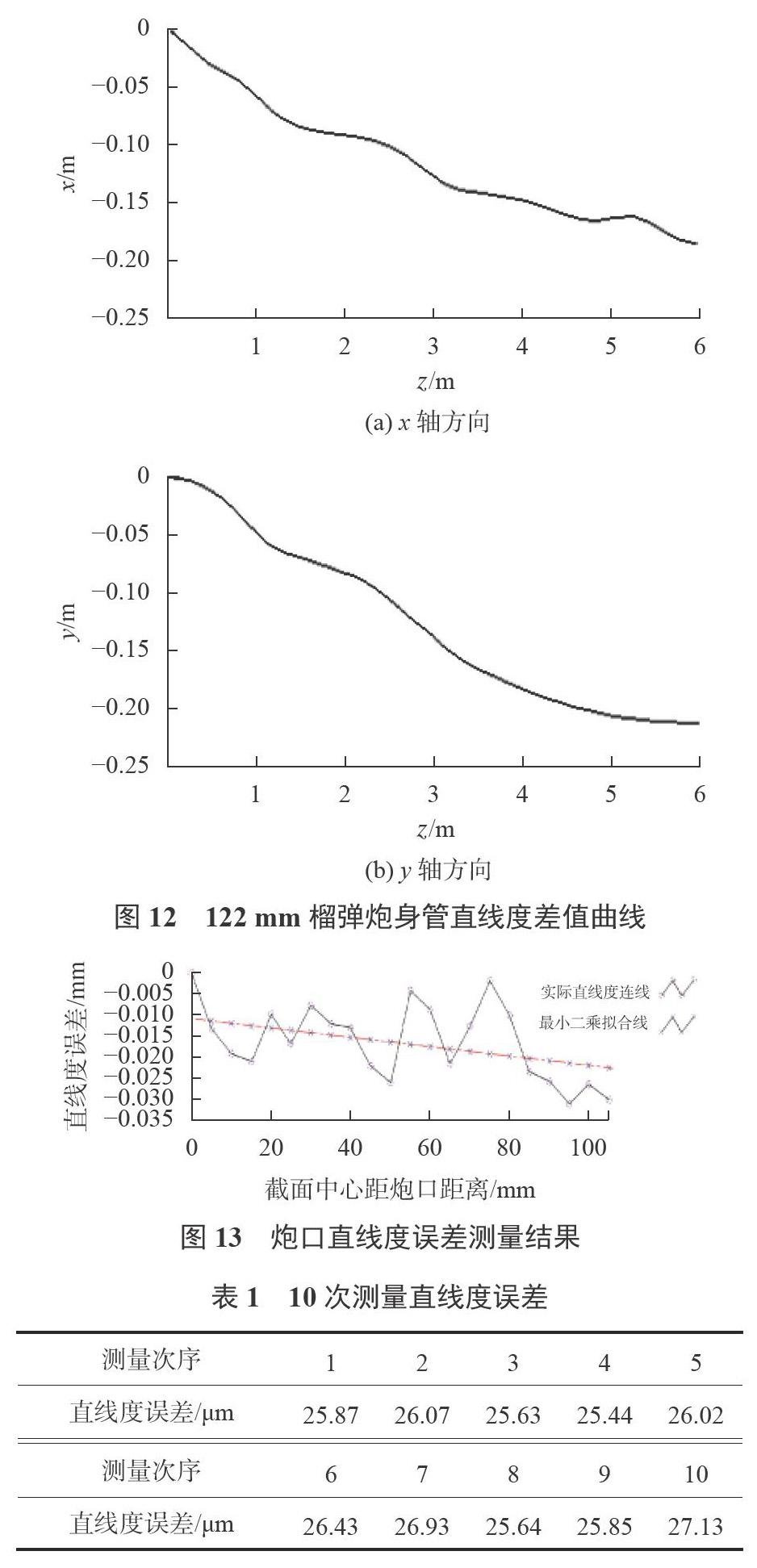
測試系統軟件采用LabVIEW圖形化編程語言進行編寫,在編寫過程中應用模塊化的設計思路,各模塊之間相互獨立,便于進行設計、調試與維護,具有使用效率高、結構靈活、操作方便的特點,測試軟件包括串口設置模塊、數據傳輸模塊、直線度計算與分析模塊、直線度誤差評定模塊與結果查詢模塊,具體功能為:串口設置模塊完成上位機與下位機的通信參數設置以及串口檢測等任務;數據傳輸模塊軟件完成通過串口將PLC中的數據傳人計算機中進行下一步處理的任務;直線度計算與分析模塊完成將輸入計算機中的數據進行計算處理得到身管直線度實際變化情況并圖形化顯示的任務;直線度誤差評定模塊完成將得到的身管直線度數據根據最小二乘法分析其直線度誤差的任務;結果查詢模塊完成對歷史檢測結果根據身管代號進行查詢的任務,軟件流程圖如圖9所示。
3直線度誤差評定
在檢測軟件計算得到身管直線度的實際變化情況后,設計采用最小二乘法對直線度誤差進行評定,該種方法具有通用性強、計算原理可靠的特點。
最小二乘線中線lLS為身管直線度實際變化線各點到該直線的距離平方和為最小的一條直線,最小二乘法是以這條線作為評定基線的方法,在任一方向上直線度誤差值如圖10所示。
4實驗與分析
我國軍隊裝備的制式火炮身管口徑繁多,在系統檢測范圍內以122mm口徑的火炮最為典型,使用該口徑的火炮約有9種其中包括榴彈炮、自行榴彈炮以及火箭炮等。為了驗證系統在實際工作過程中的性能,以122mm的榴彈炮身管作為檢測對象完成系統驗證性實驗,檢測系統軟件界面如圖11所示。
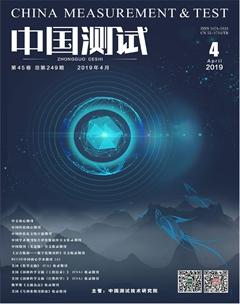
對同一根122mm口徑榴彈炮身管采用檢測系統重復檢測10次,其中一次的測量結果如圖12所示,在x和y方向上每次測量的最大直線度的最大值與最小值之差分別為0.004mm和0.002mm,誤差來源于PSD測量誤差、定位規對于激光器的定位誤差、自定心機構對于PSD的定位誤差。
在身管直線度檢測任務完成之后需要采用最小二乘法對其進行誤差評定,10次重復性實驗中其中一次炮口處的直線度誤差檢測結果如圖13所示。
10次重復性實驗得到的全身管直線度誤差檢測結果如表1所示。
根據系統對122mm口徑榴彈炮身管10次重復性檢測實驗得到的直線度誤差測量結果在25.44~27.13um之間,可以得出設計系統穩定地反應了被測身管直線度的實際情況、達到了設計目的和使用要求,可以應用于實際的檢測工作中。
5結束語
本文研究設計了一種基于橫向光電效應、內膛定位采用彈性自定心方案、利用LabVlEW進行數據處理的火炮身管直線度檢測系統,可對口徑在122~155mm的約25種制式火炮身管進行檢測。其中PSD的重復測量誤差為5um,自定心機構的定位精度根據機構精度分析理論為±7.86um,傳感器采集數據可以通過檢測軟件計算得到身管直線度變化情況并進行誤差分析。系統實現了火炮身管直線度的量化檢測,提高了檢測精度與自動化程度,為火炮系統的正常發射提供了有力的保障,同時對于機械領域重要深孔管狀零件的直線度檢測系統設計提供了一定的參考。