端電壓及功角雙重穩定約束魯棒自適應勵磁控制
2019-06-11 11:35:28遲福建劉聰申剛尚德華田艷華李桂鑫王哲
中國測試 2019年4期
遲福建 劉聰 申剛 尚德華 田艷華 李桂鑫 王哲
摘要:為實現勵磁系統非線性控制的端電壓和功角雙重穩定約束,基于非線性坐標變換方法,構建勵磁系統非線性等價系統模型,采用魯棒自適應設計方法實現Lyapunov函數構建、參數自適應估計和等價系統耗散穩定控制。在輸出功率增加和三相接地故障狀態下,對新的勵磁控制方法進行仿真測試和分析。仿真結果表明:相對于傳統反演魯棒勵磁控制方法,狀態變量波動次數減少50%,端電壓和功角穩定時間由0.2s縮短為0.1s,端電壓始終保持為額定電壓,沒有出現電壓偏移問題,不確定參數能夠在0.05s內完成估測。研究成果對于提高勵磁系統暫態穩定能力和端電壓恒定控制精度具有一定意義。
關鍵詞:非線性控制;端電壓及功角穩定;魯棒自適應控制;參數自適應;勵磁系統
中圖分類號:TM721文獻標志碼:A 文章編號:1674-5124(2019)04-0129-06
0引言
在獨立電力系統或陸地無窮大電網中,勵磁控制系統均擔負著電壓調節和改善電力系統動、靜態穩定控制的重要功能,所以勵磁控制技術是眾多學者關注的研究內容。
勵磁系統模型具有非線性、內部參數不確定和外部干擾不確定的特征。為了提高勵磁控制的性能,文獻[2]采用反演自適應設計的方法對勵磁控制進行了分析,但是該方法更多關注的是功角穩定性,對于發電機端電壓恒定性問題考慮不足;文獻14l采用自抗擾控制策略對勵磁系統非線性控制進行了分析,但是并沒有考慮系統模型的不確定特征;文獻[5]采用高階滑模控制對勵磁系統的穩定控制進行了分析,同樣在勵磁控制過程中沒有考慮阻尼系數等模型不確定參數和端電壓恒定控制問題;文獻[6]采用Lyapunov函數設計與H∞控制相結合方法詳細分析了含有參數不確定和外部干擾的勵磁系統穩定控制問題,實現了勵磁系統功角的魯棒穩定控制,但是并沒有考慮發電機端電壓恒定控制問題;文獻[7]采用精確反饋線性化方法解決了非線性勵磁系統最優控制問題;文獻[8-9]基于耗散系統理論的Hamilton系統穩定控制理論,從穩定系統能量函數角度對勵磁系統穩定控制進行了分析,但是同樣沒有考慮勵磁系統的參數不確定性問題;文獻[10]采用目標全息方法,通過構建勵磁系統布魯諾夫斯基標準型模型,給出了勵磁系統非線性最優控制實現方法;文獻[11]采用終端滑模控制方法對勵磁系統控制進行了分析,實現了滑模勵磁控制的弱抖振控制;文獻[12]采用擴展狀態觀測的方法,對不確定非線性部分進行了估測,最終實現了勵磁系統的穩定控制;文獻[13]通過綜合考慮電力系統的綜合慣量中心,在實現電力系統功角穩定控制的同時,兼顧了端電壓恒定控制,但是給出的控制律非常復雜,且含有微分項,增加了工程實現的難度。
本文在詳細分析勵磁系統非線性不確定模型的基礎上,將Ly印unoV函數構建和耗散系統理論相結合,給出了一種綜合實現勵磁系統端電壓恒定和功角穩定控制的魯棒自適應控制方法。由于所給控制方法同時考慮了勵磁系統的非線性、不確定和外部干擾特點,且在控制律推導過程中最大限度地保留了勵磁系統的非線性特征,因此,對于提高勵磁系統的穩定控制性能具有一定的意義。為了驗證本文方法的性能,在三相接地故障和負載突變兩種運行狀態下,對勵磁控制系統進行了仿真分析。
1勵磁系統模型非線性及不確定性分析
在大范圍運行狀況下,由于電抗飽和特性、阻尼系數的不精確性和外部干擾影響,勵磁系統非線性模型可表示為
由上述推導可知,勵磁控制規律式(26)完整地保留了系統的非線性特性,且可以達到AU為零的目標,因此,具有非線性魯棒穩定控制和消除端電壓偏差的雙重優勢。
3仿真測試與分析
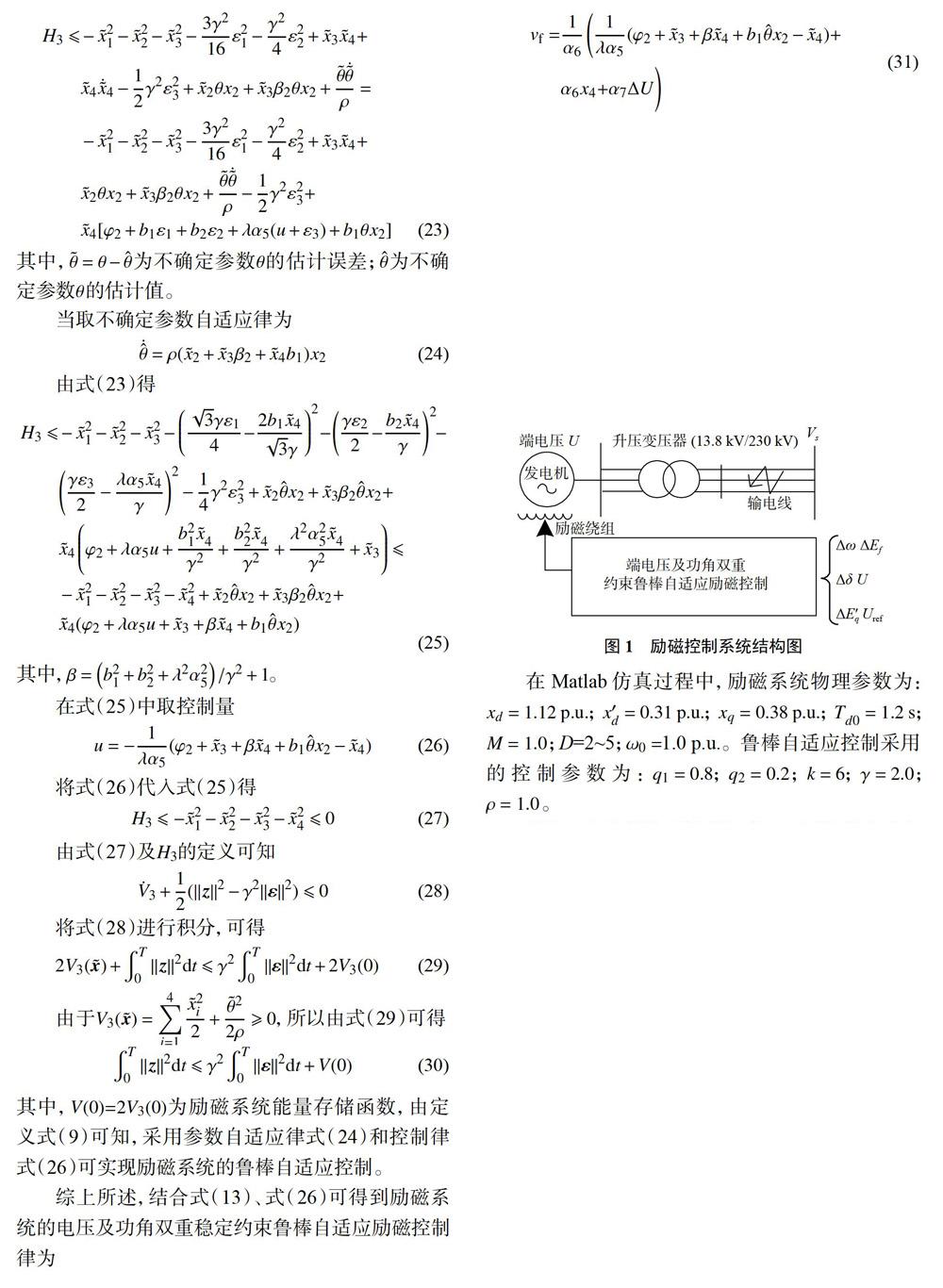
為了驗證所提魯棒自適應勵磁控制性能,并與傳統反演魯棒勵磁控制進行對比,分別對負載突變和三相接地故障進行了仿真。勵磁系統結構如圖l所示。
傳統反演魯棒勵磁控制與本文所提控制方法主要區別是前者不具備參數自適應功能,且沒有考慮式(4)表示的端電壓穩定控制功能,所以除參數p外,其他控制參數選擇與本文給出的魯棒自適應控制方法相同。
3.1負載增加仿真測試及分析
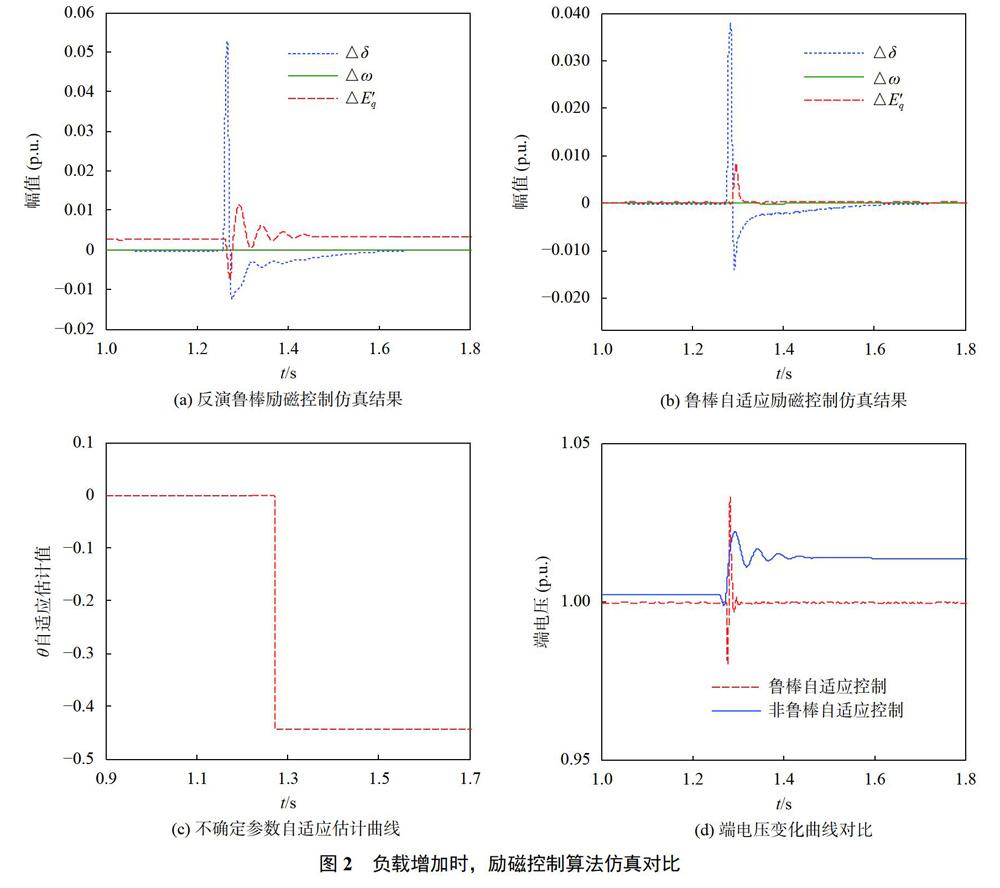
勵磁系統模型中發電機的額定容量為500MV'A,初始輸出功率為180MW,在1.28s時突然增加輸出功率為200MW,Q=80MWar。分別采用傳統反演魯棒勵磁控制與本文所提魯棒自適應控制方法進行仿真,仿真結果如圖2所示。
比較圖2(a)和圖2(b)可知,采用本文所提魯棒自適應勵磁控制方法后,由于考慮了勵磁系統參數不確定性特征和發電機端電壓恒定控制約束,△E'q的波動次數由3次降低為1次,且穩定時間由0.2s降低0.1s左右。由圖2(c)和圖2(d)可知,不確定參數θ能夠很快地實現穩定估測,在負載變化前后,采用魯棒自適應控制時,端電壓始終保持為額定電壓,而采用非魯棒自適應控制時,端電壓出現了較大的偏差。
3.2三相接地故障仿真測試及分析
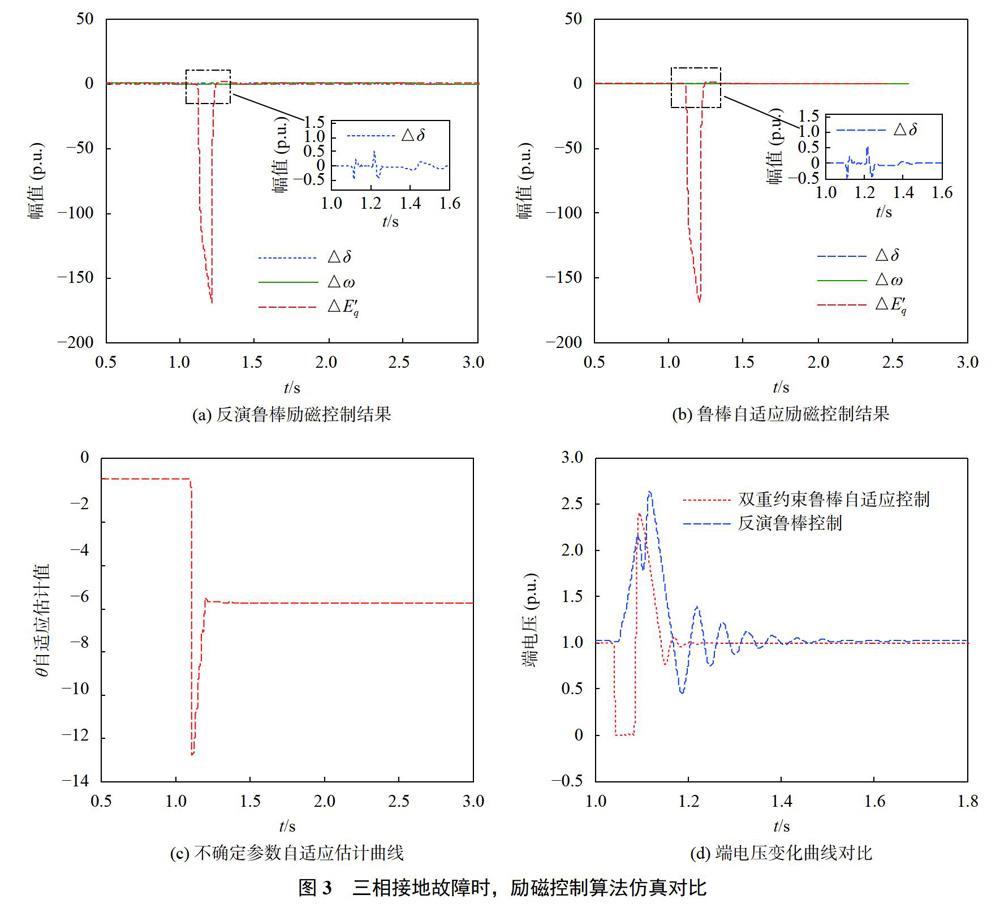
發電機額定容量同前,初始負載值為140Mw,在1.05s時在升壓變壓器的二次側發生持續0.1s的三相接地故障。分別采用傳統反演魯棒勵磁控制與本文所提魯棒自適應控制方法進行仿真,仿真對比結果如圖3所示。
比較圖3(a)和圖3(b)可知,發生三相接地故障后,相對于傳統反演魯棒勵磁控制,采用本文所提魯棒自適應勵磁控制方法后,功角和暫態電勢的穩定時間縮短。由圖3(c)和圖3(d)可知,不確定參數能夠同樣可以實現快速穩定估測,且端電壓超量由原來的2.7倍縮小為2.4倍,端電壓的波動次數由5次減少為2次。
4結束語
本文基于非線性系統耗散系統穩定控制理論,采用Lyapunov函數設計和參數自適應估測相結合方法,給出了一種端電壓和功角雙重穩定約束的魯棒自適應勵磁控制新方法,解決勵磁系統端電壓恒定和功角雙重穩定控制的勵磁系統自適應控制問題。為驗證所提控制方法的有效性,在輸出功率增加和三相接地故障情形下進行了仿真測試,并與傳統反演魯棒控制方法進行了對比分析,仿真結果表明,端電壓能夠始終保持為額定值,解決了傳統反演魯棒勵磁控制中端電壓隨負載增加而偏差增大的不足,狀態變量的穩定速度得到明顯提高,不確定參數能夠快速實現跟蹤估測,在三相接地故障狀態下,端電壓的超調和震蕩明顯減弱。研究成果對于提高勵磁系統的暫態穩定能力和端電壓恒定精度具有一定意義。