慣導(dǎo)濾波參數(shù)優(yōu)化算法
2019-06-05 06:20:58高偉偉朱文杰
傳感器與微系統(tǒng) 2019年6期
關(guān)鍵詞:優(yōu)化
高偉偉, 朱文杰, 方 丹, 王 毅, 田 杰
(陸軍工程大學(xué)石家莊校區(qū) 四系,河北 石家莊 050003)
0 引 言
為了抑制慣導(dǎo)解算參數(shù)受積累性誤差的影響,往往采用組合的方法提高導(dǎo)航系統(tǒng)性能,如衛(wèi)星與慣導(dǎo)組合、星光與慣導(dǎo)的組合等[1]。組合系統(tǒng)的核心是誤差的估計(jì)與修正,一般采用基于Kalman 濾波的誤差估計(jì)方法,相關(guān)參數(shù)的誤差估計(jì)過(guò)程是否收斂,估計(jì)速度如何,估計(jì)精度怎樣均會(huì)影響組合系統(tǒng)的性能[2~5]。在誤差估計(jì)過(guò)程中,濾波參數(shù)的設(shè)置是影響誤差估計(jì)速度和精度的關(guān)鍵因素,因此,本文對(duì)捷聯(lián)慣導(dǎo)組合濾波參數(shù)優(yōu)化方法進(jìn)行了研究。
1 Kalman濾波修正方法
由于慣性系統(tǒng)隨時(shí)間增長(zhǎng)會(huì)產(chǎn)生誤差積累,在實(shí)際工程應(yīng)用中,需要監(jiān)測(cè)捷聯(lián)姿態(tài)測(cè)量系統(tǒng)各誤差狀態(tài)量的變化,根據(jù)狀態(tài)數(shù)值變化大小對(duì)系統(tǒng)進(jìn)行干預(yù)和修正。各誤差狀態(tài)量中,有些狀態(tài)可通過(guò)儀器測(cè)量直接得到,但測(cè)量得到的數(shù)值中通常有測(cè)量噪聲,且一般不能滿足所有狀態(tài)均可通過(guò)儀器測(cè)量,這就需要通過(guò)最優(yōu)估計(jì)方法實(shí)現(xiàn)。最優(yōu)估計(jì)方法通過(guò)建立狀態(tài)方程和量測(cè)方程,對(duì)部分可測(cè)量狀態(tài)數(shù)據(jù)進(jìn)行數(shù)學(xué)處理,得到某種估計(jì)準(zhǔn)則下誤差最小的更多狀態(tài)估值,常用的最優(yōu)估計(jì)方法有Kalman濾波估計(jì),它是一種遞推線性最小方差估計(jì)[6~9]。
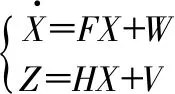
以Kalman 濾波閉環(huán)校正為例,對(duì)誤差狀態(tài)量的修正過(guò)程如圖1所示。根據(jù)各誤差參數(shù)對(duì)輸出結(jié)果的影響程度,選取適當(dāng)?shù)恼`差參數(shù)作為狀態(tài)量,并建立誤差狀態(tài)方程,結(jié)合外部參考信息和捷聯(lián)數(shù)學(xué)解算信息建立量測(cè)方程
(1)
通過(guò)觀測(cè)量采用Kalman估計(jì)出主要誤差狀態(tài)參數(shù)值,并對(duì)捷聯(lián)數(shù)學(xué)解算過(guò)程進(jìn)行誤差修正[10,11],因此,誤差修正的關(guān)鍵是如何實(shí)現(xiàn)相關(guān)參數(shù)誤差的準(zhǔn)確估計(jì)。在Kalman 濾波估計(jì)過(guò)程中,濾波參數(shù)初值P0,Q0,R0的設(shè)定將影響誤差狀態(tài)量的估計(jì)速度、精度以及系統(tǒng)的穩(wěn)定性[10,11]。由于實(shí)際應(yīng)用中無(wú)法準(zhǔn)確獲得過(guò)程噪聲Wk和量測(cè)噪聲Vk的統(tǒng)計(jì)特性,大多情況下通過(guò)實(shí)際系統(tǒng)的先驗(yàn)值或?qū)崪y(cè)數(shù)據(jù)得到P0,Q0,R0的大概取值范圍[12]。如何合理設(shè)置濾波參數(shù)初值,以最大程度上改善并發(fā)揮Kalman濾波估計(jì)性能,是提高系統(tǒng)精度的關(guān)鍵環(huán)節(jié)[13]。
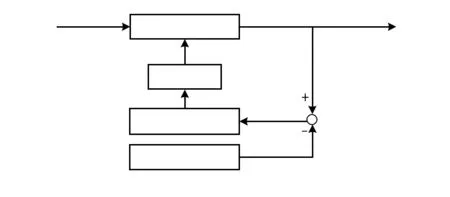
圖1 基于Kalman濾波的誤差狀態(tài)修正過(guò)程
2 初始濾波參數(shù)的優(yōu)化
為分析濾波參數(shù)初值對(duì)濾波性能的影響,以陸基條件下的姿態(tài)誤差估計(jì)為例,選取速度誤差、姿態(tài)誤差、位置誤差、加速度計(jì)零偏、陀螺零偏為狀態(tài)量,且設(shè)狀態(tài)量
X=[δVEδVNφEφNφUδLδλρEρNεE
εNεU]
設(shè)初始條件下,三軸陀螺的常值零偏均為0.1°/h,隨機(jī)噪聲0.05°/h,三軸加速度計(jì)的常值零偏為100 gn,隨機(jī)噪聲為50 gn,速度誤差均為0.1 m/s,位置誤差均為100 m,初始俯仰角誤差為5′,橫滾角誤差為15′,方位角誤差為15′;以東向和北向速度誤差為觀測(cè)量,設(shè)定量測(cè)誤差均為標(biāo)準(zhǔn)差為0.01 m/s的零均值高斯噪聲。載體初始條件下處于靜止?fàn)顟B(tài),10 s后以0.5 m/s2的加速度向北行駛,20 s后停止加速并勻速運(yùn)動(dòng)至第120 s結(jié)束,濾波周期為0.1 s。根據(jù)以上仿真條件,通常情況下Kalman 濾波初始參數(shù)設(shè)定如下:
P0=diag[(0.1 m/s)2,(0.1 m/s)2,(5′)2,(5′)2,(15′)2,(100 m)2,(100 m)2,(100gn)2,(100gn)2,(0.1°/h)2,(0.1°/h)2,(0.1°/h)2]
Q0=diag[(50 gn)2,(50 gn)2,(0.05°/h),(0.05°/h),(0.05°/h),0,0,0,0,0,0,0]
R0=diag[(0.01 m/s)2,(0.01 m/s)2]
在以上條件下,得到的姿態(tài)誤差估計(jì)曲線如圖2所示。整理Kalman濾波估計(jì)結(jié)果得到,上述初始濾波參數(shù)條件下,俯仰角和橫滾角誤差在靜態(tài)條件下即可估計(jì),且120 s內(nèi)估計(jì)精度在0.5′以內(nèi),方位角誤差在北向加速激勵(lì)后可估計(jì),120 s內(nèi)的估計(jì)精度在1′左右。由于在捷聯(lián)姿態(tài)解算過(guò)程中,方位角精度受總體誤差源的影響較大,因此,本文以方位角的誤差估計(jì)為例,在設(shè)置不同的初始參數(shù)值條件下,通過(guò)仿真分析揭示不同濾波參數(shù)對(duì)姿態(tài)誤差估計(jì)的影響。
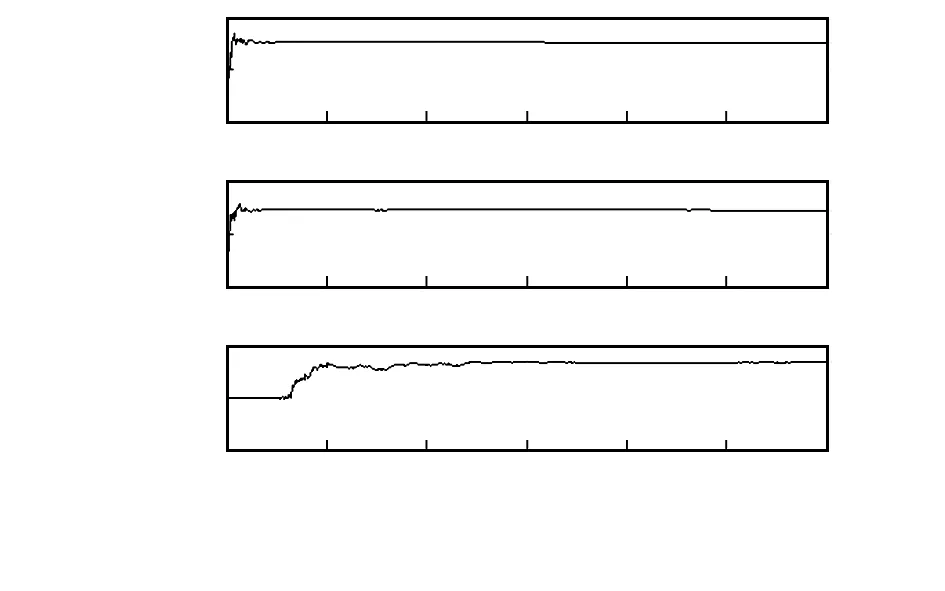
圖2 姿態(tài)誤差估計(jì)結(jié)果
1)不同P/Q/R值對(duì)誤差狀態(tài)估計(jì)的影響
在保持其它條件不變得情況下,設(shè)定P初值分別為P0,0.1P0,0.5P0,5P0,20P0,得到方位角誤差估計(jì)結(jié)果如圖3所示。分析仿真結(jié)果可得,較大的P值可提高方位角誤差估計(jì)速度,但收斂過(guò)程具有較大震蕩;較小的P值時(shí),方位角誤差估計(jì)速度較慢,但收斂過(guò)程較穩(wěn)定,具有較好的抗干擾能力。
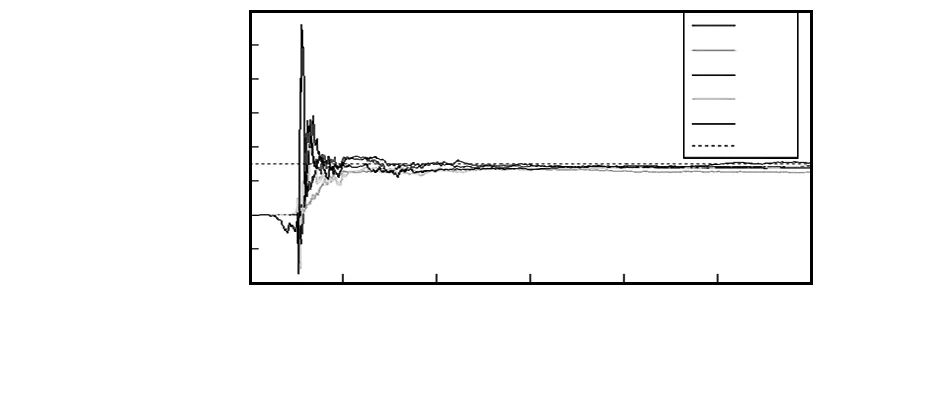
圖3 不同P值下的方位角誤差估計(jì)
在保持其它條件不變得情況下,設(shè)定Q初值分別為Q0,0.01Q0,0.1Q0,5Q0,20Q0,得到方位角誤差估計(jì)結(jié)果如圖4所示。
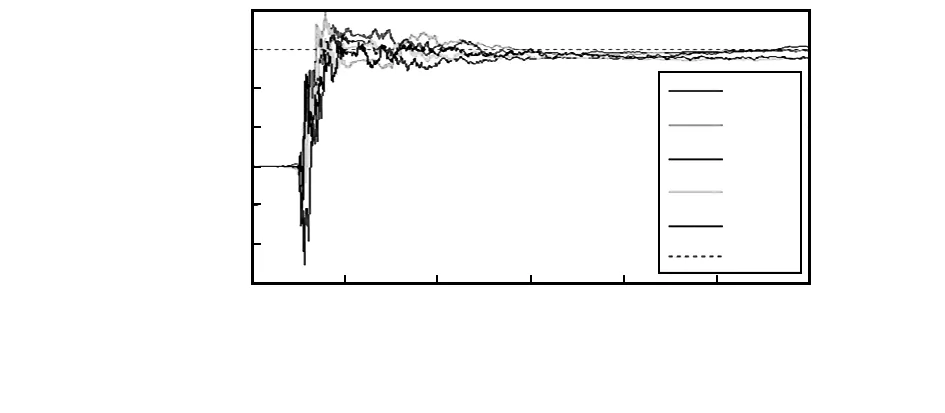
圖4 不同Q值下的方位角誤差估計(jì)
分析結(jié)果可知較大的Q值將影響方位角誤差的估計(jì)精度,引起較大的估計(jì)誤差;較小的Q值有利于提高估計(jì)精度。
同理,設(shè)定R初值分別為R0,0.01R0,0.1R0,5R0,20R0,得到方位角誤差估計(jì)結(jié)果如圖5所示。從圖中可看出,較小的R值將引起較大的震蕩,不利于系統(tǒng)的穩(wěn)定性;過(guò)大的R值將引起較大的估計(jì)誤差;適當(dāng)增大R值有利于提高系統(tǒng)的穩(wěn)定性和估計(jì)精度。
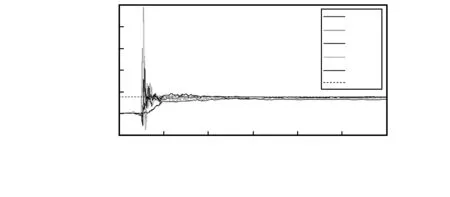
圖5 不同R值下的方位角誤差估計(jì)
2)濾波參數(shù)值的優(yōu)化
綜合上一節(jié)的分析結(jié)果,在實(shí)際應(yīng)用中,為提高濾波估計(jì)精度以及系統(tǒng)的穩(wěn)定性,可設(shè)置較小的P值、Q值及較大的R值。設(shè)優(yōu)化后的濾波參數(shù)P=0.5P0,Q=0.5Q0,R=2R0,非優(yōu)化濾波參數(shù)P=5P0,Q=5Q0,R=0.1R0,標(biāo)準(zhǔn)濾波參數(shù)P=P0,Q=Q0,R=R0;在上述參數(shù)設(shè)置條件下,得到方位角的誤差估計(jì)結(jié)果如圖6所示。從圖中可看出,參數(shù)優(yōu)化后方位角誤差估計(jì)過(guò)程更加平穩(wěn),且在120內(nèi)可達(dá)到較高的估計(jì)精度,相比標(biāo)準(zhǔn)濾波參數(shù)輸出精度提高了0.5′。
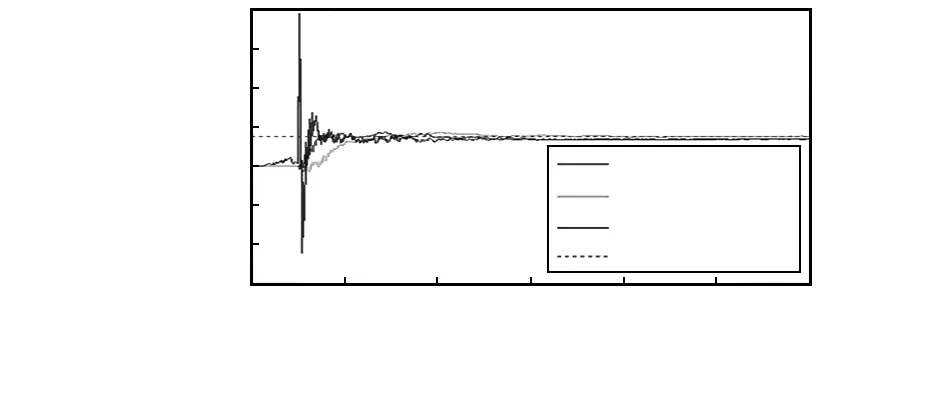
圖6 濾波參數(shù)優(yōu)化前后的方位角誤差估計(jì)
3 結(jié) 論
慣導(dǎo)誤差修正效果如何涉及多方面的因素,其中濾波參數(shù)的設(shè)置是重要因素之一。慣導(dǎo)濾波參數(shù)優(yōu)化方法研究為初始濾波參數(shù)的設(shè)置提供了參考依據(jù),有助于通過(guò)初始濾波參數(shù)的設(shè)置提高濾波估計(jì)性能,進(jìn)而提高慣導(dǎo)誤差修正效果。結(jié)合工程實(shí)驗(yàn)效果和仿真變化規(guī)律,可為實(shí)際應(yīng)用中初始濾波參數(shù)的設(shè)置提供經(jīng)驗(yàn)依據(jù)。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45