基于自適應參數的非局部立體匹配算法*
2019-06-05 06:20:48敖小樂賀繼林李成雷
傳感器與微系統 2019年6期
關鍵詞:融合
敖小樂,賀繼林,鄧 宇,2, 李成雷
(1.中南大學 機電工程學院,湖南 長沙 410083;2.湖南山河科技股份有限公司, 湖南 株洲 412002)
0 引 言
立體匹配是機器視覺領域中的一個基礎問題,其核心是通過查找雙目或多目圖像的對應像素點來計算視差,進而獲得所拍攝場景的深度信息。目前在自動駕駛、虛擬現實、機器人導航等領域均有廣泛應用[1]。Scharstein D等人[2]對典型的立體匹配算法進行了深入研究,將立體匹配分為代價計算、代價聚合、視差選擇/優化、視差修正四個過程。根據視差優化方法的不同,立體匹配可分為全局算法和局部算法兩類。全局算法通過構造能量最小化函數求取視差,算法精度高,但計算量大、實時性差。局部算法利用窗口內鄰域信息來計算單像素視差,相比全局算法,具有計算復雜度低、效率高等優點,但存在窗口選擇難題,且其計算復雜度與所選窗口相關。
代價計算用來度量左右圖像對應像素的相似性,常見的有絕對亮度差(absolute brightness difference,AD)、梯度、Census變換等代價,Hirschmuller H等人[3,4]對這些匹配代價進行了詳細的評述。目前,多數立體匹配算法選擇融合多種匹配代價,Mei X等人[5]對AD和Census代價進行線性融合;Fan H R等人[6]對Census和梯度代價進行融合。結果表明對多種代價進行融合能夠兼顧不同匹配代價的優點,可以取得更高的精度以及更強的魯棒性。
為提高信噪比,局部算法假定同一窗口內像素具有相似的視差,用窗口內像素代替單個像素代價,也即代價聚合。常用方法有引導圖濾波[7]、十字交叉窗口聚合[8]等,但這些方法仍然受到支持窗口的限制,使得精度難以提升。Yang Q[9]提出非局部算法,通過構造圖像的最小生成樹(minimum spanning tree,MST),在圖像全局范圍內進行像素代價聚合,在時效性以及精確性上都取得了較好的結果。基于此,Mei等人[10]提出分割樹(segment tree,ST)算法,Yao P等人[11]提出MST-CD算法均表明,基于最小生成樹的代價聚合方法要優于其他局部算法。
本文提出一種融合多種代價的改進非局部立體匹配算法;增強了算法在低紋理區域表現,提高了視差精度。
1 算法描述
1.1 代價計算
傳統的非局部算法對RGB顏色代價和水平方向梯度代價進行線性融合
(1)

由于該匹配代價只利用了水平方向梯度,忽略了垂直方向梯度包含的豐富信息;此外由于兩截斷閾值τAD,τGRDX不一致,該融合代價無法直觀體現兩代價實際所占比重。針對這些問題,本文先融入垂直方向梯度,并對各代價做歸一化處理,再進行線性融合
C′(p,p′)=α·ρ[CAD(p,p′),τAD]+β·ρ[CGRDX(p,p′),τGRDX]+(1-α-β)·ρ[CGRDY(p,p′),τGRDY]
(2)
式中α,β∈(0,1)用來平衡各代價比重;CGRDY(p,p′)為垂直方向梯度代價;各匹配代價歸一化計算公式為
ρ(C,τ)=1-e(-C/τ)
(3)
經過以上歸一化處理并線性融合后,匹配代價被映射到(0,1)區間。為進一步增強算法在低紋理區域表現,對融合后代價進行對數變換
C(p,p′)=ln(1+eC′(p,p′))
(4)
C(p,p′)即為最終匹配代價。上式中,當代價趨于0時,該變換函數能夠將值為零的代價轉換為非零代價ln 2,從而提高低紋理區域像素對代價聚合的貢獻;而當代價逐漸增大時,該函數則愈趨近于C′(p,p′),這樣便能保持高紋理區域代價的區分性。
1.2 代價聚合
文獻[9]中,圖像被看作是一幅四連通或八連通的無向圖G=(V,E),V為無向圖頂點,為圖像像素點集合;E為無向圖的邊,連接四鄰域或八鄰域像素對。根據該無向圖便可構建一顆最小生成樹,其中邊權為相鄰像素顏色(R,G,B)的最大絕對差
(5)
式中Ij(p)為像素p在j通道的值。然后采用kruskal算法構建最小生成樹。
對于該最小生成樹中任意兩點p,q,其路徑是唯一的,因此,該路徑長度也必然唯一,記為D(p,q),其值為路徑上各邊權重之和。基于此,可定義圖像中任意兩像素p和q的相似性
S(p,q)=S(q,p)=e-D(p,q)/σ
(6)
式中σ為參數用來調節該相似性。最終聚合代價為
(7)

1.3 自適應選取參數
根據1.2節描述,非局部算法采用式(6)描述相鄰兩像素相似度,通過調節參數σ來權衡鄰近像素對聚合代價的貢獻大小:σ越大,S(p,q)則越小,聚合代價主要由最小生成樹上鄰近像素貢獻,即聚合代價由少部分像素主導,導致算法在低紋理區域易出現錯誤匹配;反之,σ越小,將有更多的像素貢獻代價,導致在高紋理區域誤匹配率較高。
可以看出,σ的選擇對最終視差精度會產生較大影響,目前的非局部立體匹配算法[10~12]多著重于最小生成樹的構造,以期得到最符合圖像結構的最小生成樹,而對于σ多采用經驗值。本文算法對參考圖進行分析,自適應的選擇合適的σ值。
首先將圖像轉至HSV顏色空間。在HSV空間中,像素的色度和亮度被分開,計算相鄰像素的色度差為
(8)
式中h(p),s(p)分別為像素p的色相值及飽和度值,其中,色相和飽和度都經過了歸一化處理。統計所有相鄰像素色度差,便可求得圖像平均色度差η
(9)
式中E為連接任意兩相鄰像素的邊集。
根據平均色度差定義可知:η越大,圖像顏色紋理則越豐富,為了降低誤匹配率,在代價聚合時,鄰近像素應做主要貢獻,即σ越大;反之,圖像紋理越單一,則需要更多像素參與主要貢獻。可建立η與σ關系
σ=kη
(10)
式中k為比例系數。依據原圖平均色度差η為不同紋理圖像自適應地選擇合適的σ。
1.4 視差選擇及修正
視差選擇采用WTA(Winner-Takes-ALL)策略
(11)


(12)
重新計算匹配代價
(13)
2 實驗結果與分析
本文算法使用Middlebury2.0立體匹配評測平臺提供的31組圖像對進行實驗。實驗環境為:Visual Studio 2013下C/C++編譯環境,Win10 x64系統,Intel Core i7—6700 CPU—3.4G Hz,16 G內存。
為驗證算法實際性能,除非特別說明,否則本文中涉及到的視差圖都未經過任何視差修正或后處理操作;實驗中誤差限為1像素。
2.1 匹配代價驗證
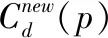
為驗證改進后代價的有效性,對代價改進前后非局部算法得到的視差圖進行對比。圖1(a)和(e)為原圖;(b)和(f)改進前;(c)和(g)經過代價融合后;(d)和(h)經過對數變換后,改進后視差圖中誤匹配標記點明顯少于改進前,尤其是低紋理區域。對比圖(b),(c)以及圖(f),(g)可看出,融入垂直方向梯度代價后,算法在低紋理區域表現得到很大提升;對比(c),(d)以及(g),(h)發現,通過對融合代價作對數變換,能夠進一步增強算法在低紋理區域表現。
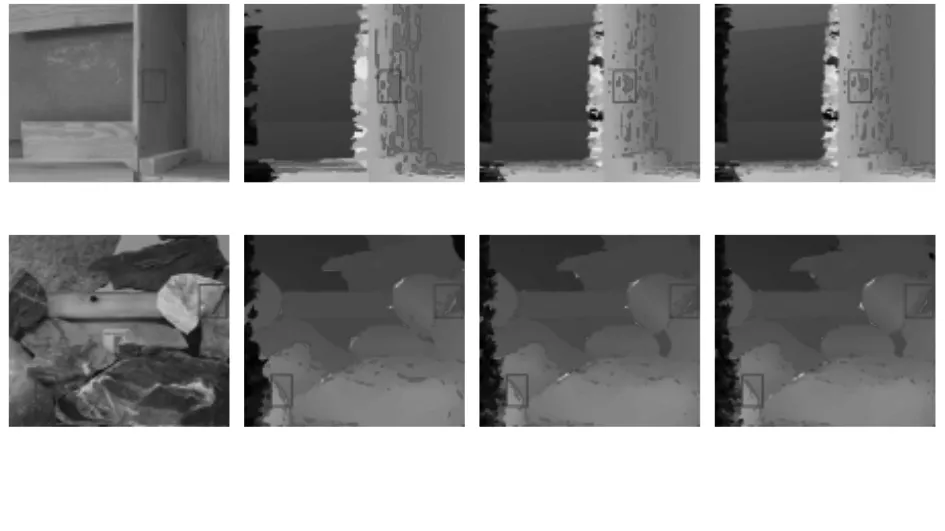
圖1 代價改進前后非局部算法對Wood1和對Rocks1圖像處理獲得的視差
如圖2,通過比較代價改進前后非局部算法在Middlebury平臺上31組圖像對的平均誤匹配率可知,融入垂直方向梯度代價后,算法的誤匹配率大幅降低,再對融合代價作對數變換,可進一步降低算法誤匹配率。
圖2 代價改進前后非局部算法在非遮擋區域誤匹配率
2.2 自適應參數分析
為驗證平均色度差η與參數σ之間比例關系,分別計算不同紋理圖像平均色度差,并運行改進代價后的非局部算法,得到各圖像最佳σ值。
如圖3所示,不同參考圖具有不同的最佳σ值,且其變化趨勢與平均色度差的變化基本一致;對比圖3(a)和圖3(b)可知,低紋理圖像具有更小的η以及σ,這是因為在以式(5)為邊權建立的最小生成樹上,相鄰像素點此時具有相似的視差值,較小的σ能夠促使更多的像素參與聚合,提高匹配精度。可以看出,平均色度差確實能夠反映圖像紋理信息。
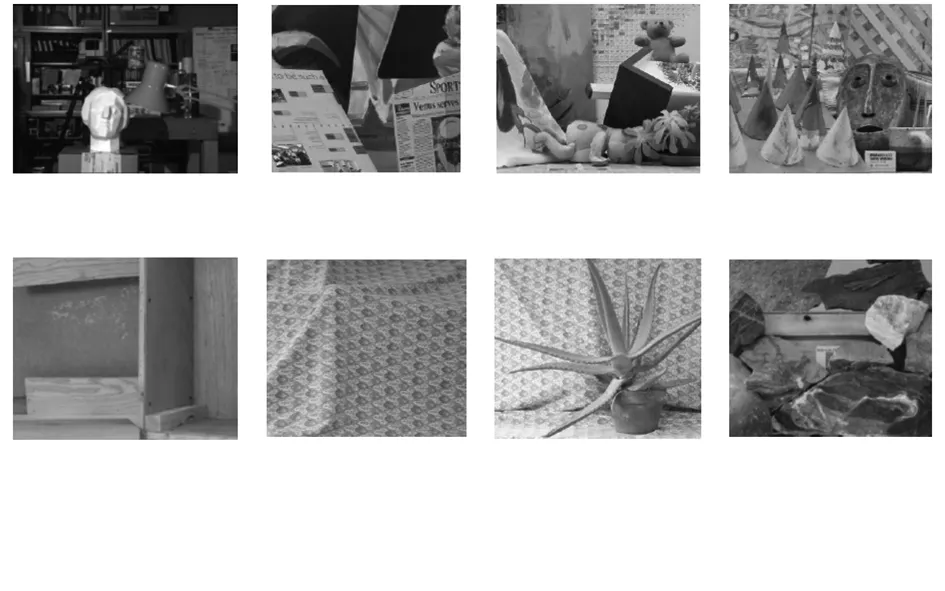
圖3 不同參考圖的平均色度差η及最佳σ值
通過改變k,可以改變η和σ的比例關系:
如圖4所示,隨著k值的增加,所提算法在非遮擋區域對Middlebury測試平臺31組圖像對的誤匹配率有一先減再增的過程,并在k為1.0時取得最小值。
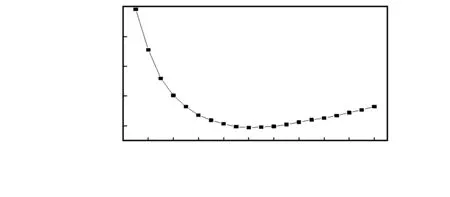
圖4 不同k取值下的誤匹配率
2.3 算法對比
為測試所提算法的總體性能,本文選取MST[9],ST[10],CS-GF[13]作為對照算法。實驗中,涉及到的參數設置:α為0.15,β為0.48,τAD為9,τGRDX為0.5,τGRDY為0.5,k為1.0。
所提算法在Middlebury上31組立體圖像對性能評估(無視差修正,誤差限為1像素)的平均誤匹配率最低,僅為7.86 %,精度最高;平均排名為1.61,其中在18組圖像對中取得最好結果,在10組圖像對中取得第二好結果,表明所提算法具有更好的泛化能力;本文算法運行時間為1.2 s,這是因為引入了垂直方向梯度以及對數變換,增加了計算量,導致處理時間增加。然而所提算法在小幅增加運行時間基礎上,在精度及泛化性上有很大的提升。
表1為經過視差修正后,4種算法在本文實驗環境中對Middlebury 2.0上31組立體圖像對的評測結果。可以看出,經視差修正處理,所有算法精度均有不同幅度提升,同時運行時間也相應增加;而本文所提算法無論在非遮擋區域誤差還是全像素誤差方面仍舊取得最好的結果。

表1 不同立體匹配算法在Middlebury上31組立體圖像對性能評估(經視差修正,誤差限為1像素)
圖5為各算法對Tsukuba,Teddy,Flowerpots,Monopoly圖像對處理后得到視差。
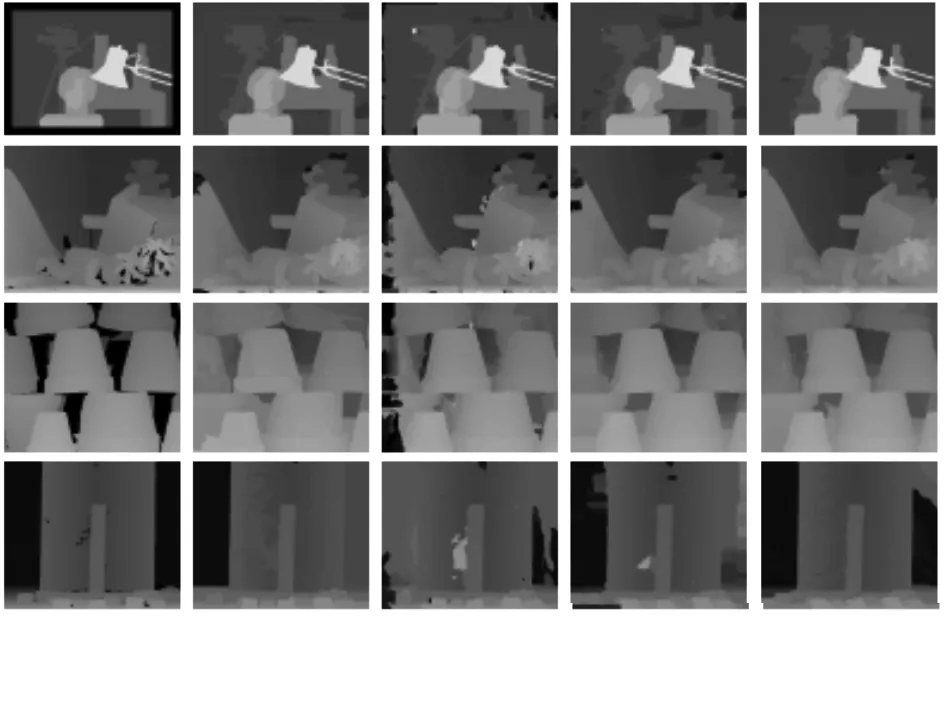
圖5 不同立體匹配算法在Tsukuba、Teddy、Flowerpots和Monopoly圖像對上的測試結果
3 結 論
實驗結果表明,所提算法在Middlebury測試平臺上平均誤匹配率為7.86 %,經視差修正后平均誤匹配率為6.62%,匹配精度優于當前優秀的局部和非局部算法。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
數學年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(2021年4期)2021-07-13 08:58:28
無線電通信技術(2021年3期)2021-06-08 03:33:48
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38