一種Buck變換器并聯均流系統的設計
2019-06-05 08:04:04李昊遠張元科徐浩東
通信電源技術 2019年5期
宋 偉,李昊遠,張元科,徐浩東,韓 猛
(黑龍江科技大學 電氣與控制工程學院,黑龍江 哈爾濱 150000)
0 引 言
Buck變換器是一種降壓型開關控制器,以高輸入、低輸出、效率優良和響應速度快等特點,可適用于當前許多應用場景[1]。為了滿足開關電源系統的容量、減少元器件所承擔的電壓與電流應力,模塊化串并聯Buck變換器應運而生。但是,模塊化技術的引入會帶給各個模塊間不均衡的問題,直接影響Buck變換器的動態性能和可靠性。因此,分析Buck變換器的工作原理,進一步研究并聯均流的方法,對研究Buck變換器的動態性能和提高其可靠性具有重要作用。
1 均流方法
設計采用一種數字邏輯控制均流方式,電路原理如圖1所示。將各塊Buck裝置并聯,通過采集參數t1、t2、…、tn各分模塊的電流,將各模塊的電流和負載總電流經過A/D裝換模塊輸送到可編程邏輯器件。對比各模塊電流和總負載電流,通過分析電流的大小輸出不同占空比的PWM波調制各模塊,從而使各模塊電流得到均衡。數字邏輯控制均流方式具有均流精度高、反應速度快等優點[2],特別是在航天等具有較高均流精度要求的場合下具有重要的實際應用意義。
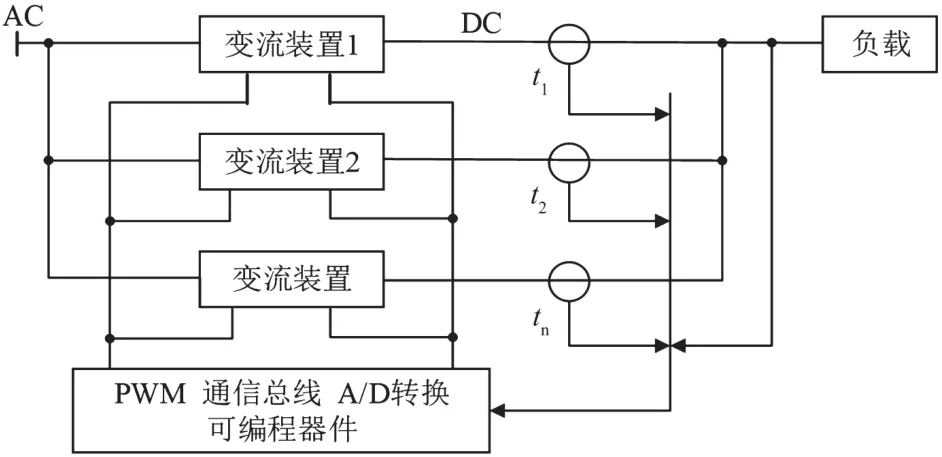
圖1 數字邏輯控制均流法電路原理圖
2 硬件電路設計
以2路Buck變換器為例,對Buck變換器模塊系統進行均流設計,系統控制原理如圖2所示。對系統進行電壓和電流檢測,以2個Buck模塊的電流為內環,采用PID模糊控制方式對2個Buck模塊進行控制,使2個Buck模塊的電流能夠通過PID模糊控制方式按照定比進行均流[3]。通過采集模塊總的輸出電壓,將輸出電壓與基準電壓進行比較,使整個系統的輸出電壓穩定在一個恒定值,從而保證均流系統的穩定。
3 軟件部分
系統中,軟件的主要作用是完成命令輸入、輸出采樣、軟件過流保護和結果顯示等功能,主程序流程如圖3所示。
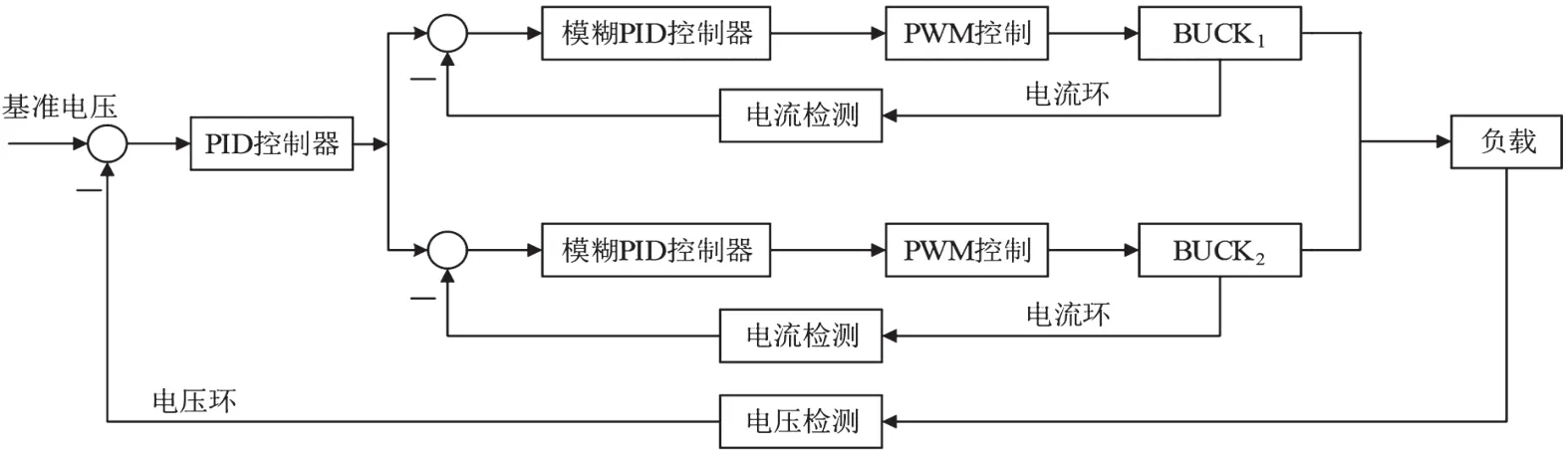
圖2 系統控制原理圖
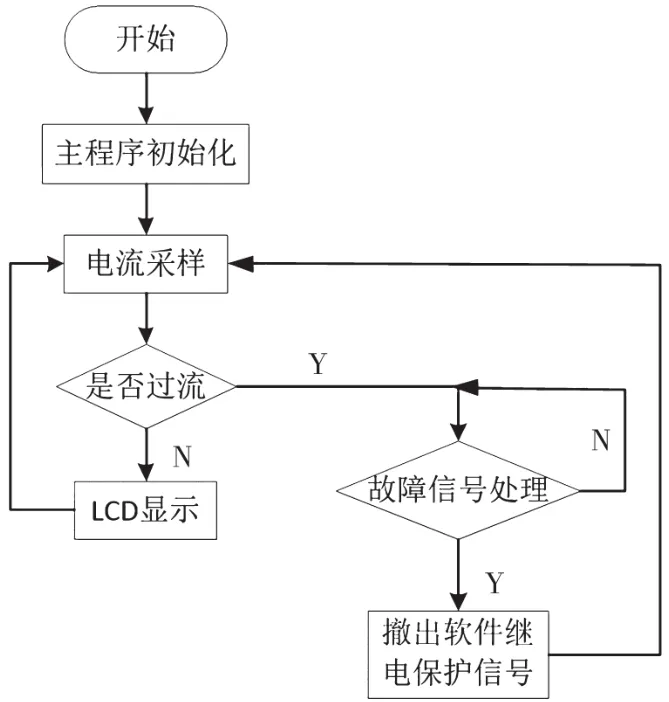
圖3 主程序流程圖
圖4 為監控模塊的軟件控制流程。為保護系統的正常運行,對整個并聯均流系統進行監控處理。當出現故障時,整個控制單元會自動中斷,以達到保護設備的目的[4]。
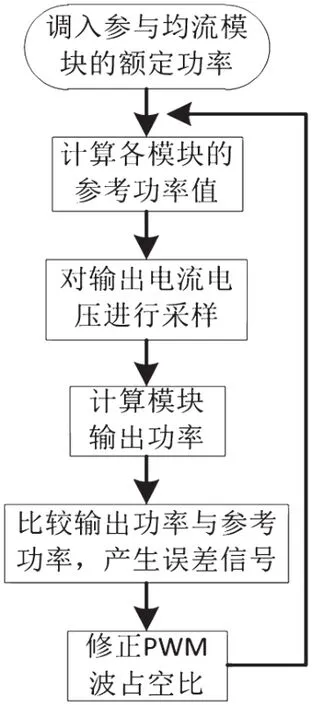
圖4 監控模塊的軟件控制流程圖
4 實驗測試
利用仿真軟件仿真測試電路的各個模塊,對輸入電壓進行擾動測試,突增輸入電壓設為2~34 V,突減輸入電壓設為2~14 V。測得相同輸入電壓擾動下,4種不同均流方法下的輸出電壓的變化和恢復到穩定所需的時間。系統的擾動性能指標數據如表1所示。

表1 4種不同均流方法下的擾動性能指標數據表
由表1可知,在輸入電壓擾動的情況下,4種不同均流方法下,系統所具有的動態性能是不同的。在雙環模糊PID方法控制下,系統電壓波動的幅度最小,且恢復到穩定所需的時間最短。實驗數據說明,PID數字控制均流系統具備輸出電壓穩定、恢復速度快和均流精度高的優點,能進一步提高并聯均流系統的動態性能和可靠性。
5 結 論
通過對Buck變換器并聯均流系統的研究,分析數字均流方式和雙閉環控制系統,并進行了實驗測試。實驗結果證明:數字控制均流方法可以達到很好的均流效果;當參數攝動或負載擾動時,設計的系統能保持良好的動態和穩態特性,具有控制靈活、響應快和適應性強的優點,實現了高精度和高魯棒性控制,具有一定的自適應能力和智能水平。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12