基于響應面和遺傳算法的尾座式無人機結構參數優化
2019-06-04 01:10:46劉文帥姚小敏李超群張夢飛淡煦珈韓文霆
農業機械學報 2019年5期
劉文帥 姚小敏 李超群 張夢飛 淡煦珈 韓文霆
(1.西北農林科技大學機械與電子工程學院, 陜西楊凌 712100; 2.西北農林科技大學旱區農業水土工程教育部重點實驗室, 陜西楊凌 712100; 3.南京禾譜航空科技有限公司, 南京 211300; 4.西北農林科技大學水土保持研究所, 陜西楊凌 712100)
0 引言
尾座式無人機是一種尾座坐地式垂直起降飛行器,融合了多旋翼的垂直起降特性和固定翼的高效巡航特性,有效解決了多旋翼航程短和飛行效率低,固定翼無人機起降難、部署時間長和輔助保障設備多等問題,可以滿足日益復雜的農業低空遙感作業要求[1-3]。相較于其他垂直起降無人機,尾座式無人機無需額外的轉動控制部件,具有結構簡單、質量輕、整機自然穩定性好和操作簡便等優點,近些年得到廣泛關注。
國內外學者常用計算流體動力學(Computational fluid dynamics,CFD)方法進行尾座式無人機的設計和氣動優化,通過CFD數值模擬方法能夠獲得無人機的升力、阻力和升阻比等氣動特性參數,通過氣動參數的分析,在機翼、螺旋槳、小翼和副翼等部件的結構參數優化、氣動布局優化和動力學建模等方面已取得了一定的研究成果[4-17]。由于CFD計算方法只能獲得離散的數據點,很難進行全局范圍內最優結構參數的求解,因此基于全局最優點求解的響應面和多目標遺傳算法(Multi-objective genetic algorithm,MOGA)受到越來越多的關注,并逐漸應用到結構設計中。在復合材料無人機的結構強度改進、機翼的減重、動力系統飛行效率的提高、換熱器結構參數優化和加工機床的結構設計等方面取得了很多研究成果[18-25]。
本文將響應面和多目標遺傳算法應用于尾座式無人機的優化設計,構建無人機的翼展長、后掠角、小翼高和小翼厚4個結構參數與升阻比和阻力的響應面模型,以升阻比最大、阻力最小為優化目標,采用多目標遺傳算法求解最優結構參數。
1 材料與方法
1.1 尾座式無人機結構與參數
1.1.1結構布局
設計的尾座式無人機采用飛翼雙動力前拉布局形式,如圖1所示,主要由左右對稱的機翼、小翼、電機座、正反轉電機和螺旋槳組成。碳桿貫穿機翼、電機座和小翼,起到機身加固和安裝定位的作用。機翼通過翼根膠粘的方式組成機身,小翼和電機座通過膠粘的方式固定在機身上,并且保持小翼和電機座軸線與機身軸線平行。電機和螺旋槳通過螺紋固定在電機座上。

圖1 尾座式無人機結構示意圖Fig.1 Schematic of tail-sitter UAV1.機翼 2.小翼 3.舵面 4.電機座 5.電機 6.螺旋槳
尾座式無人機有多旋翼起降和固定翼巡航兩種飛行模式。多旋翼起降時,通過正反轉螺旋槳為無人機提供垂直上升的動力;并通過兩個反轉差速電機的轉速進行左右的姿態控制;通過舵面的俯仰運動進行無人機的俯仰姿態調節。當飛機達到一定高度時,切換為固定翼巡航模式,電機工作模式轉換為反轉同速電機,為固定翼巡航狀態提供前拉動力;舵面的工作模式轉換為固定翼混控模式,進行固定翼的俯仰和盤旋姿態的控制。
1.1.2結構參數范圍
尾座式無人機采用飛翼布局形式,根據文獻[4-5]可知,翼展長、后掠角、小翼高和小翼厚是影響尾座式無人機升阻比和阻力的主要因素,如圖2所示。
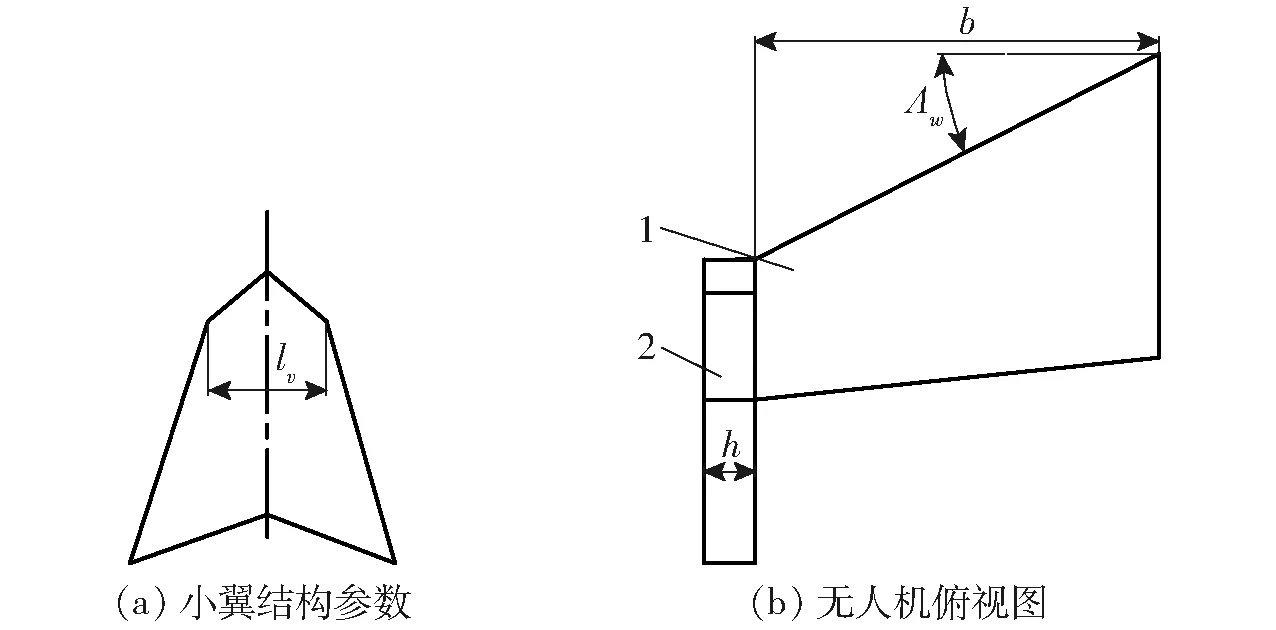
圖2 尾座式無人機的結構參數Fig.2 Structural parameters of tail-sitter UAV1.機翼 2.小翼
由文獻知現有的小型固定翼無人機的翼展長b的范圍為900~1 200 mm,后掠角Λw為15°~60°,小翼高lv為0.05b~0.3b,小翼厚h為3~7 mm,確定尾座式無人機結構參數范圍為:翼展長900~1 300 mm,后掠角為15°~35°,小翼高25~45 mm,小翼厚3~7 mm。本文以翼展長1 000 mm,后掠角20°、小翼高30 mm和小翼厚6 mm為原始樣機進行結構參數優化。
1.1.3結構參數優化流程
尾座式無人機結構參數優化流程如圖3所示。
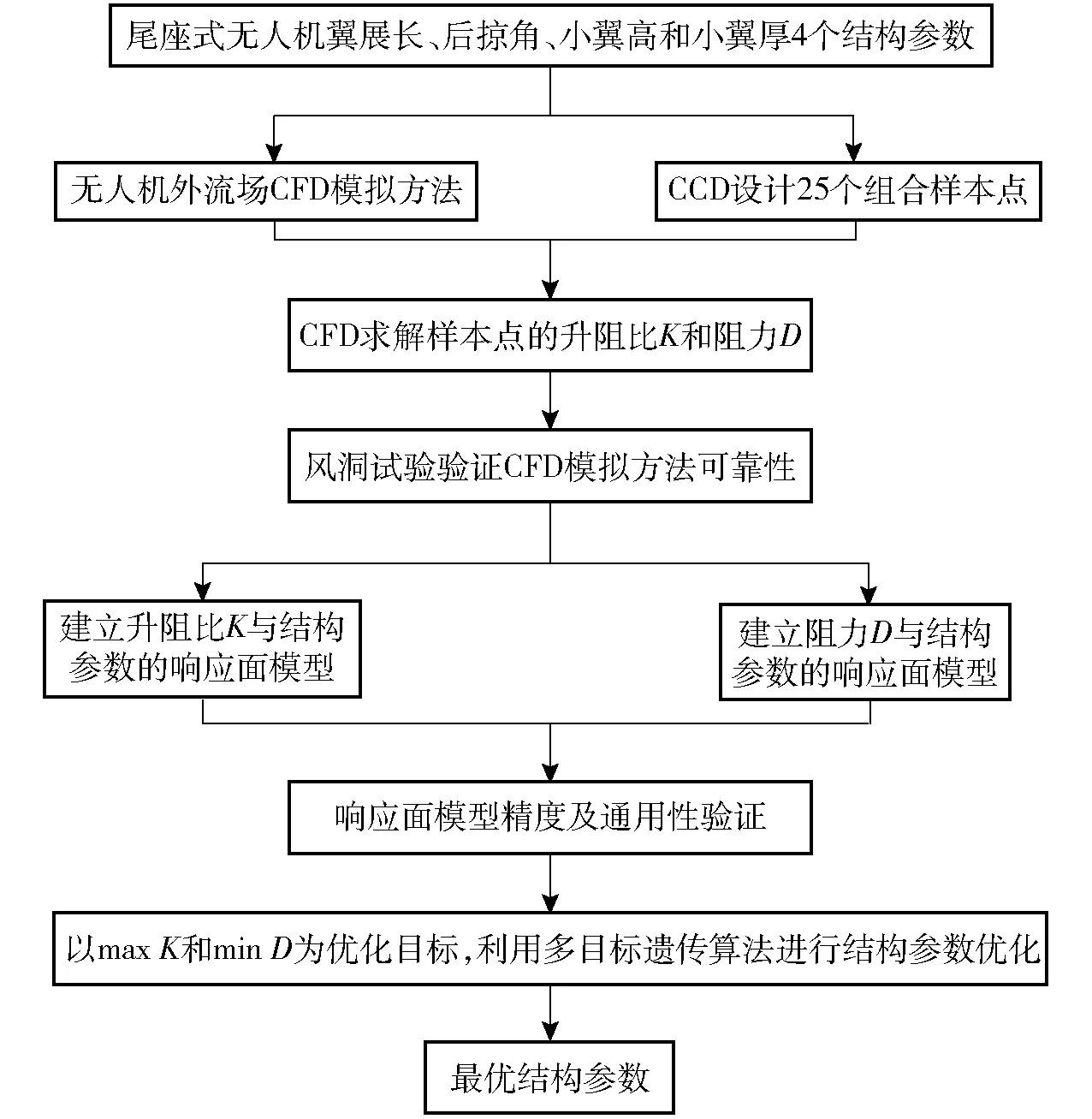
圖3 結構參數優化流程圖Fig.3 Flow chart of structural parameter optimization
本文對尾座式無人機的翼展長、后掠角、小翼高和小翼厚4個結構參數進行優化,通過CCD進行4個結構參數的組合設計得到25個組合樣本點和3個對照樣本點,在CFD中模擬計算得到各樣本點的升阻比和阻力,并通過風洞試驗驗證CFD數值模擬方法的可靠性。利用多項式回歸的方法分別建立了升阻比和阻力與結構參數的響應面模型,并由對照樣本點的CFD模擬值進行驗證,以升阻比最大和阻力最小為優化目標,利用多目標遺傳算法進行結構參數優化得到最優結構參數。
1.2 無人機外流場數值模擬方法
尾座式無人機的結構優化是反復權衡續航時間和姿態轉換穩定性的過程,其中較大的升阻比能夠提高無人機的氣動效率,延長續航時間;較小的阻力能夠降低無人機的側向滑移,提高轉換過程的穩定性。本文采用CFD數值模擬的方法對尾座式無人機的升阻比和阻力進行模擬計算。由于螺旋和電機布置在機翼的氣動弦長上,螺旋槳在機翼上作用力可視為0°攻角下的氣動力,相對較小可以忽略。并且由于無人機為左右對稱布局,利用CATIA軟件對機身左側建立三維模型,并去掉螺旋槳、電機和電機座等結構。將三維模型導入ANSYS的Geometry模塊構建外流場的三維實體模型,利用ICEM對外流場進行非結構體網格劃分,而且為了更好地捕捉無人機近壁面外流場區域的流動細節,對無人機周圍網格進行局部加密處理,如圖4a所示,最終生成的外流場網格數量為230萬個節點,無人機近壁面處的網格如圖4b所示。
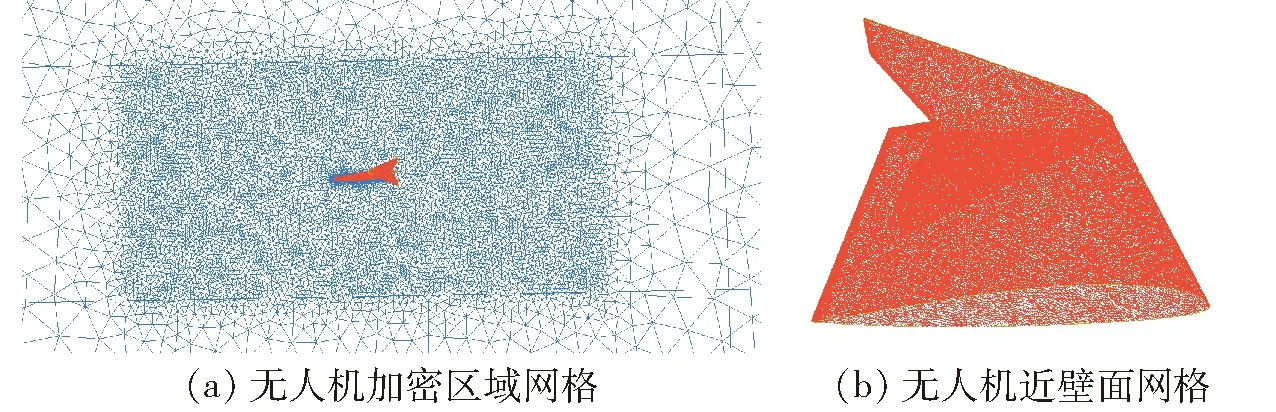
圖4 無人機外流場網格Fig.4 Grid of UAV outflow
尾座式無人機的姿態轉換過程是攻角逐漸增大的過程,當攻角超過18°時進入失速狀態,為非定常流動模式,現有的CFD軟件無法進行精準模擬,本文模擬不同結構的無人機在攻角為4°~12°時的升阻比和阻力。無人機的飛行速度為12 m/s、雷諾數為50 000時為湍流,選用SSTk-ω模型,入口速度為12 m/s,速度夾角為4°~12°,出口壓力為標準大氣壓,計算區域的邊界假定為無滑移條件,用標準的邊界方程進行近壁面處理,用SIMPLE算法進行方程求解。
1.3 組合樣本點設計及模型構建方法
1.3.1組合樣本點設計
CCD設計是在兩因子全水平試驗的基礎上增加了重復使用的中心點和軸向點,使得每個因子有5個變量水平(如圖5所示),以適應二次模型的擬合。利用CCD對翼展長、后掠角、小翼高和小翼厚4個結構參數進行設計得到16個立方點、8個軸向點和1個中心點,總計25個組合樣本點。在組合樣本點之外隨機抽取3個對照樣本點,用于驗證響應面模型的通用性。
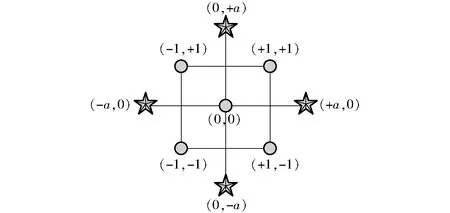
圖5 CCD樣本點設計Fig.5 Design of CCD sample points
1.3.2模型構建方法
利用CFD計算25個組合樣本點的升阻比和阻力,并采用二次多項式擬合的方法分別構建升阻比和阻力與4個結構參數的響應面模型。響應面模型表示為
yi=Cti+ε
(1)
其中
C=[C1C2C3C4]
式中yi——第i個點的響應面模型估算值
ti——第i個點的回歸系數
C——回歸參數矩陣
ε——相對誤差
1.4 多目標遺傳算法
尾座式無人機以固定翼巡航模式進行目標區域的遙感圖像采集,在設計過程中應保證無人機獲得較大的升阻比。姿態轉換過程中俯仰角從0°逐漸增加到90°,在該過程中為保證姿態轉換過程的平穩性,無人機的阻力應盡量小,則無人機的多目標遺傳算法公式表示為
maxK(x)=[K1(x)K2(x) …KN(x)]
(2)
minD(x)=[D1(x)D2(x) …DN(x)]
(3)
其中
x=(x1,x2,x3,x4)
式中x——結構參數向量
xd——結構參數
MOGA的求解過程是一個種群構建、個體求解和個體尋優的循環過程,直至達到設定的目標函數。利用1.3.2節構建的響應面模型進行個體求解,并通過約束條件進行個體篩選,并重新構建種群,循環迭代直至尋找到升阻比最大且阻力最小的最優個體,即為最優結構參數。
1.5 數值模擬方法驗證
1.5.1試驗設備
基于升阻比和阻力的CFD模擬值建立響應面模型,采用風洞試驗進行CFD數值模擬方法的驗證。在25個CCD組合樣本中隨機選擇一個樣本點參數為:翼展長1 000 mm、后掠角27°、小翼高40 mm和小翼厚5 mm,并分別測定樣本在不同風速下的升阻比和阻力。由于風洞的風場直徑(800 mm)限制,根據風洞試驗的相似準則,將樣本按照1∶0.6的比例進行縮放,得到風洞模型尺寸為翼展長600 mm、后掠角27°、小翼高24 mm和小翼厚3 mm,采用3D打印技術進行風洞模型的加工,如圖6所示。
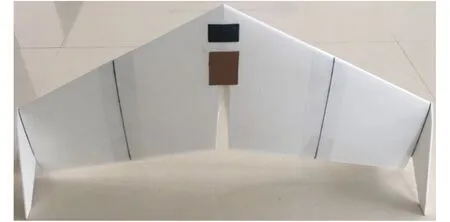
圖6 風洞試驗樣機Fig.6 Wind tunnel experimental prototype
1.5.2試驗條件與方案
風洞試驗系統包括無人機模型、飛機支架、六分量應變天平、風機、變頻器和數據采集控制系統等,如圖7所示。無人機模型加工過程中,為保證機翼的流線分布形式和表面光潔,采用展向掃描遞推的打印方式進行模型的加工,并對凹槽和縫隙進行蒙皮處理。為降低支架對無人機尾部氣流的干擾,采用天平內嵌機身和支桿延伸的安裝方式進行樣機的固定。為保證模型在風場中數據的準確性,試驗過程中無人機保持在風場的中心位置(離地1.4 m)。試驗過程中變頻器控制風機轉速待風速平穩后,由六分量應變天平進行升力和阻力的采集,并由數據分析系統對采集到的1 000組數據進行處理,最終得到無人機的升阻比和阻力。
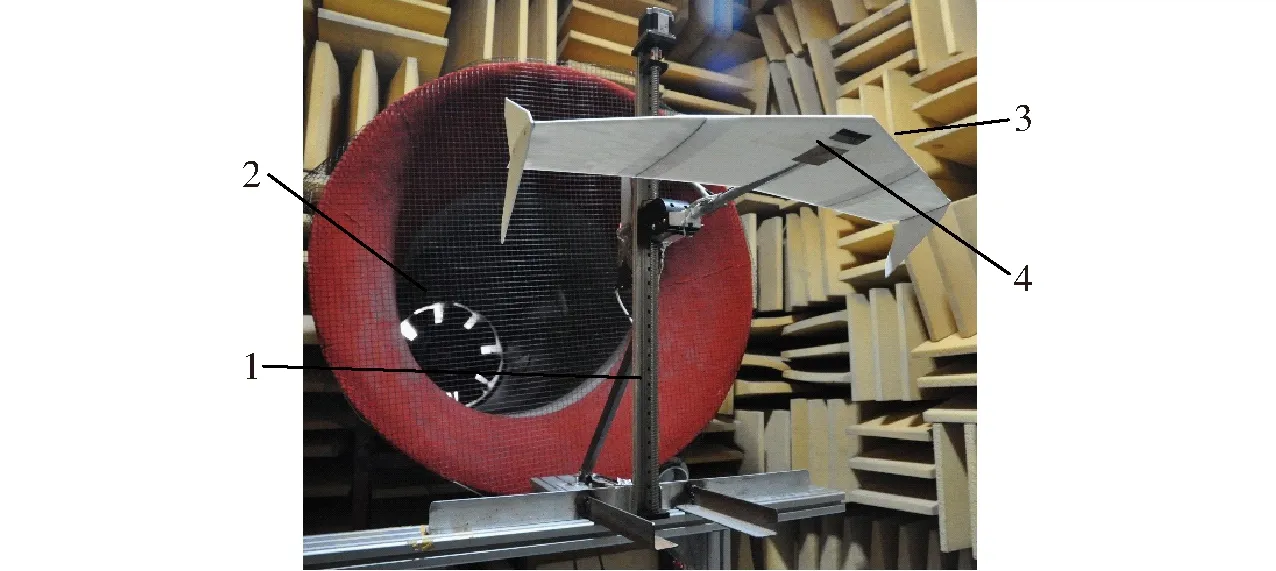
圖7 風洞試驗系統Fig.7 Wind tunnel experiment system1.天平支架 2.風機 3.試驗樣機 4.六分量應變天平
風洞試驗在西北工業大學翼型葉柵空氣動力學重點實驗室內進行,試驗中測定無人機俯仰角為8°,通過變頻器將風速穩定在12~20 m/s之間,間隔2 m/s,測定樣機在不同風速下的升阻比和阻力,并將CFD的模擬值與風洞試驗測量值進行對比。
1.5.3數值模擬結果驗證
無人機工況的改變,實際上是雷諾數的變化。依據雷諾數相似理論,幾何相似的前提下,相同的雷諾數具有相似的氣動特性[26]。繪制樣本和風洞模型在不同雷諾數下的升阻比和阻力散點圖,并與風洞數據進行對比,如圖8所示。
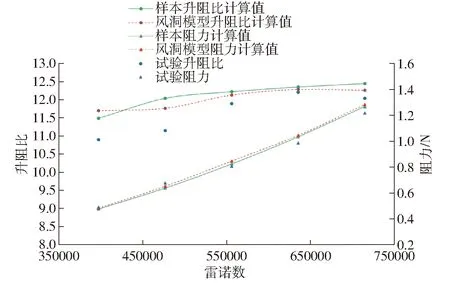
圖8 風洞試驗驗證結果Fig.8 Wind tunnel test results
風洞模型與樣本的升阻比相對誤差小于2.3%,阻力相對誤差小于2.7%,表明基于等比縮放的方法進行數值模擬具有較高的可信度;風洞模型的仿真數據與試驗的升阻比相對誤差小于7.3%,阻力相對誤差小于5.8%;樣本的仿真數據與試驗的升阻比相對誤差小于8.0%,阻力的平均相對誤差為5.7%,在允許的誤差范圍內。風洞模型與樣本的誤差原因是縮放帶來的原理誤差;風洞模型仿真數據與試驗數據的誤差原因是風洞模型采用三維打印加工,模型的表面粗糙度會影響機翼近壁面的流場分布,風洞模型阻力較小,試驗過程中模型的抖動和信號干擾等因素均會影響阻力的測量精度;樣本仿真數據與試驗的誤差原因是由縮放原理和試驗環境共同導致,但試驗結果誤差小于8%,在允許范圍內,表明CFD數值模擬方法可靠,可以用于尾座式無人機的外流場模擬。
2 結果與分析
2.1 結構參數對升阻比和阻力的影響
2.1.1結構參數對升阻比的影響
無人機的升阻比主要與翼展長b、后掠角Λw、小翼厚h和小翼高lv等結構參數有關,建立各結構參數在不同攻角α下的升阻比變化曲線,如圖9~12所示。
由圖9可知,翼展長從900 mm增加到1 300 mm的過程中無人機的升阻比呈線性增加。因為無人機的升阻比與展弦比有關,展弦比越大升阻比越大。當其它結構參數確定時,展弦比與翼展長呈線性關系,即翼展長與升阻比線性相關。
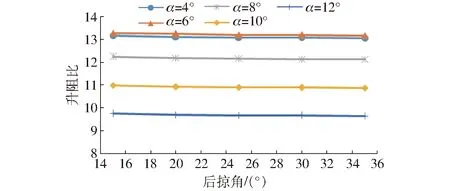
圖10 后掠角與升阻比的關系曲線Fig.10 Relationship curves between sweep angle and lift drag ratio
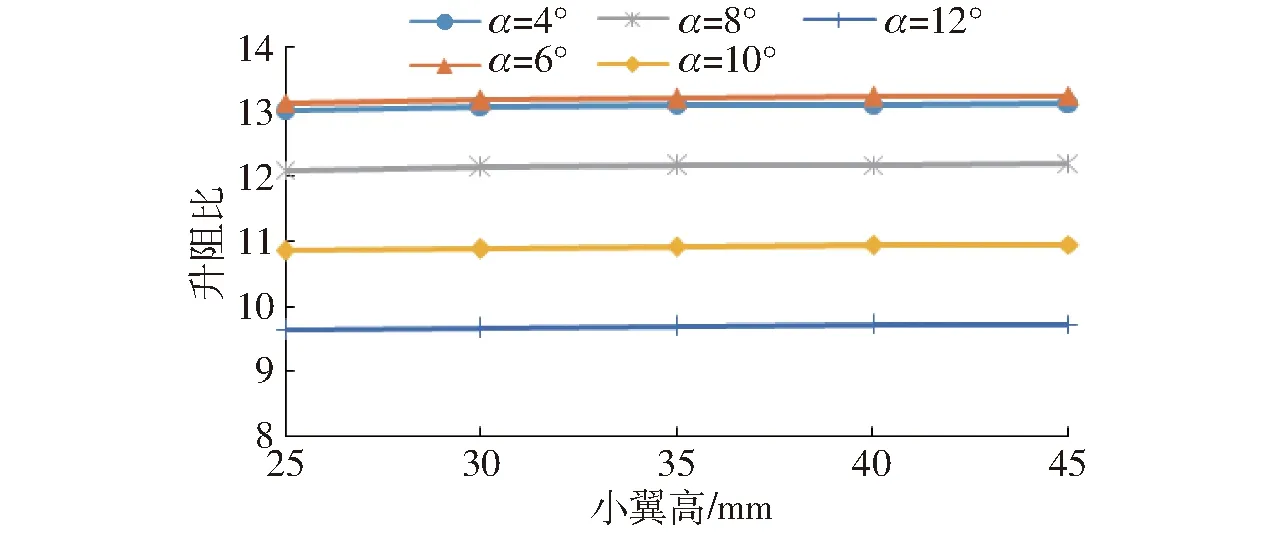
圖11 小翼高與升阻比的關系曲線Fig.11 Relationship curves between wing height and lift drag ratio
在攻角不同的情況下,升阻比隨后掠角和小翼高的變化如圖10、11所示。在相同的攻角下升阻比隨后掠角的增大而略有減小,隨小翼高的增加而略有增大。當攻角為12°時,后掠角為35°的升阻比比后掠角為15°的降低了1%;小翼高為25 mm的升阻比比小翼高為45 mm的升阻比下降了1%,表明后掠角和小翼高對升阻比的影響較小。因為升阻比主要與展弦比相關,展弦比主要與翼展長和氣動弦長相關,在梯形翼中隨著后掠角和小翼高的增加氣動弦長的變化較小,因此后掠角對升阻比K影響較小。
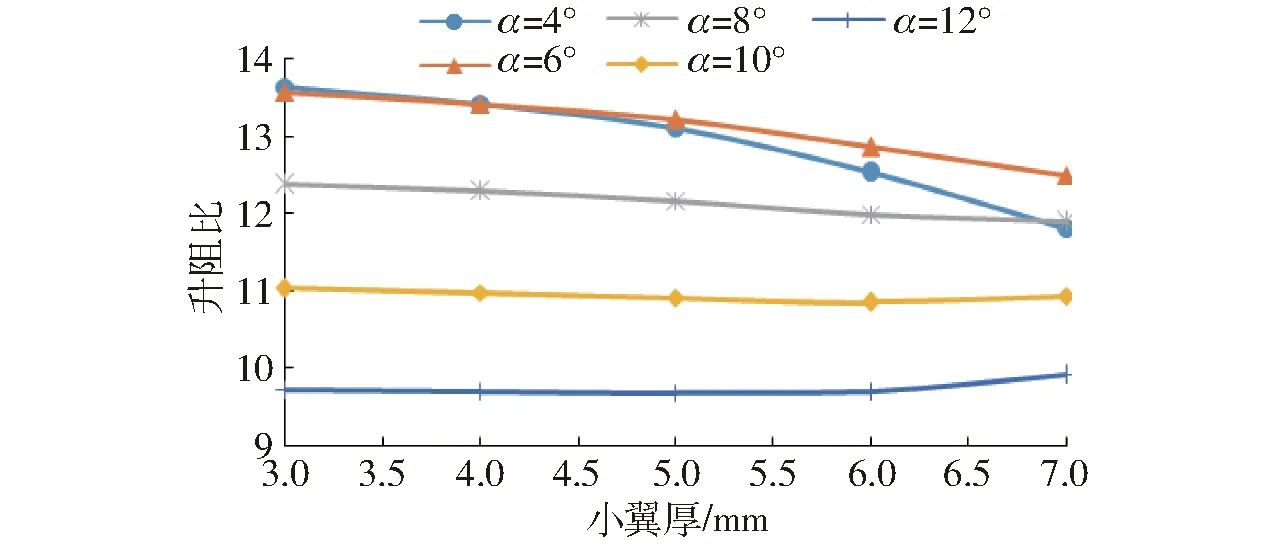
圖12 小翼厚與升阻比的關系曲線Fig.12 Relationship curves between wing thickness and lift drag ratio
由圖12可知,在小攻角4°~8°時,升阻比隨小翼厚的增加而逐漸減小,并且4°攻角時升阻比的下降速率最大;在大攻角10°~12°時,隨著小翼厚的增加,升阻比先減小后增大。因為在小攻角時,小翼主要用于降低翼尖擾流,減小誘導阻力提高升阻比,并且隨著小翼厚的增加,小翼表面的擾流情況加劇,反而會增加誘導阻力降低升阻比;在大攻角的情況下,小翼表面會出現渦的脫落,進而影響機翼表面的氣流分布。
2.1.2結構參數對阻力的影響
在不同翼展長的情況下阻力隨攻角的變化曲線如圖13所示。計算結果表明,在相同的攻角下,阻力隨翼展長的增加而增大。此外,在其它幾何參數確定時,隨著翼展長的增加,阻力的增加速率變大。因為機翼上下表面的壓強差產生了升力,并且由于氣流壓差的作用在翼尖附近會產生一個由下向上繞的誘導阻力,隨著翼展長的增加,誘導阻力增大,因此增加了無人機的阻力。
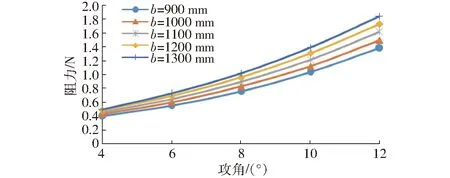
圖13 攻角與阻力的變化曲線Fig.13 Relationship curves between attack angle and drag
圖14顯示了在不同的小翼厚時,阻力隨后掠角的變化關系。結果表明隨著后掠角的增大,阻力先增大后減小。在指定小翼厚的情況下存在阻力的最大值。因為在后掠角為15°~20°的變化過程中,機翼的后緣逐漸由后掠變為水平,由于后緣氣流附著面積增加,導致阻力增加;在后掠角在20°~35°的變化過程中,隨著前緣后掠角的增加導致機翼壁面附近氣流的提前分離,無人機的阻力逐漸減小。此外,在較小的小翼厚時,阻力的增加速率較慢。它可以解釋為當小翼厚小于4 mm時,小翼可以視作為薄片用于降低翼尖擾流,進而減小誘導阻力;當小翼厚大于4 mm時,小翼可以視作翼展的延伸,并且在小翼厚方向上會生成新的誘導阻力,并且隨著小翼厚的增加,誘導阻力變大。結果表明,當后掠角增加時,阻力先增大后減小;當小翼厚增加時,阻力逐漸增加。
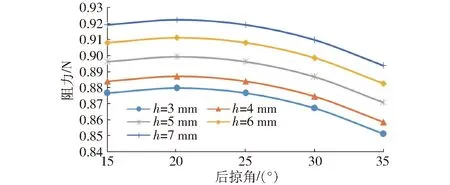
圖14 后掠角與阻力的變化曲線Fig.14 Relationship curves between sweep angle and drag
2.2 響應面模型建立與精度驗證
2.2.1響應面模型建立
利用Design-Expert軟件,采用逐步回歸的方法構建了翼展長、后掠角、小翼高和小翼厚4個結構參數與升阻比和阻力的二次響應面方程

(4)

(5)
根據響應面方程對結構參數進行了敏感性分析,靈敏度越高,表明該結構參數對性能的影響越顯著,結果如圖15所示。
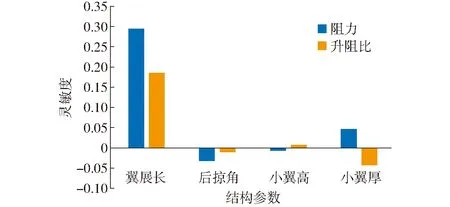
圖15 結構參數敏感性分析結果Fig.15 Sensitivity of structural parameters
在阻力方面翼展長和小翼厚為正效應,后掠角和小翼高為負效應,并且在靈敏度上b>Λw≈h>lv。在升阻比方面,翼展長和小翼高為正效應,后掠角和小翼厚為負效應;并且在靈敏度上b>h>Λw>lv。
2.2.2響應面模型精度評價及驗證
利用構建的升阻比和阻力響應面模型進行了MOGA中個體的求解,因此需要對響應面模型的精度和通用性進行驗證。用3個對照樣本點的CFD模擬值作為真值,并與響應面預測值進行對比,結果如表1所示。
阻力的相對誤差隨著翼展長的增加逐漸減小,升阻比的相對誤差隨著翼展長的增加先減小后增大,3個對照點的相對誤差小于3%,表明響應面模型具有較高的精度和良好的通用性,可用于尾座式無人機升阻比和阻力的預測。
2.3 最優結構參數
以升阻比取得最大值、阻力取得最小值為目標函數,利用MOGA在全局范圍內尋找最優結構參數。采用篩選法構建初始種群,利用響應面模型進行升阻比和阻力的計算,如圖16所示,得到了3組最優的結構參數如表2所示。其中最優點1的升阻比提高了16.3%,阻力降低了4.1%。3個優化模型的升阻比平均提高了14.2%,阻力降低了4.8%,均優于原始樣機。對比3架樣機的面積可知,3號樣機機翼面積最小,在姿態轉換過程中能減小側向偏移量,因此本文選定最優點3為最終模型。則尾座式無人機的結構參數為:翼展長1 123 mm、后掠角34°、小翼高39 mm、小翼厚3 mm。
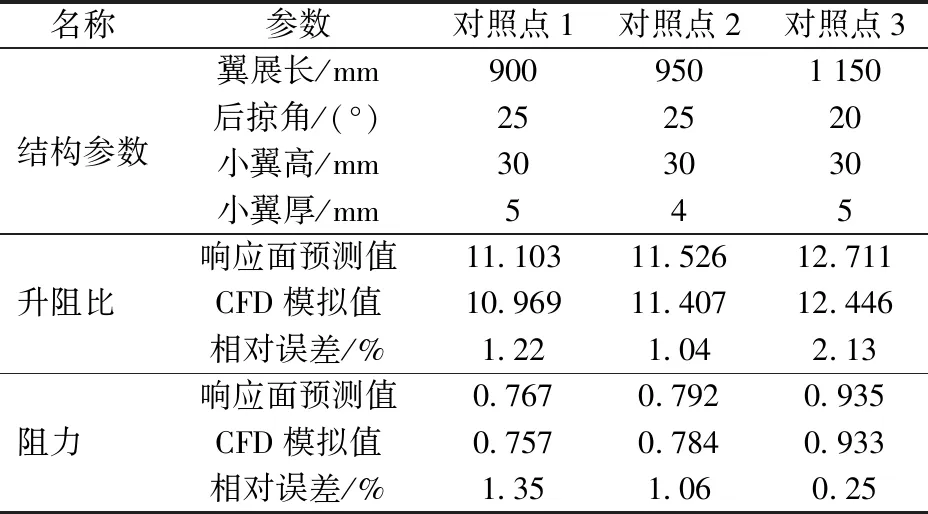
表1 響應面模型精度驗證Tab.1 Accuracy verification of response surface model
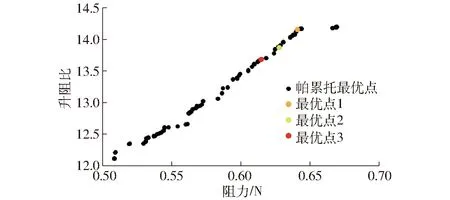
圖16 多目標遺傳算法尋優結果Fig.16 MOGA optimization result
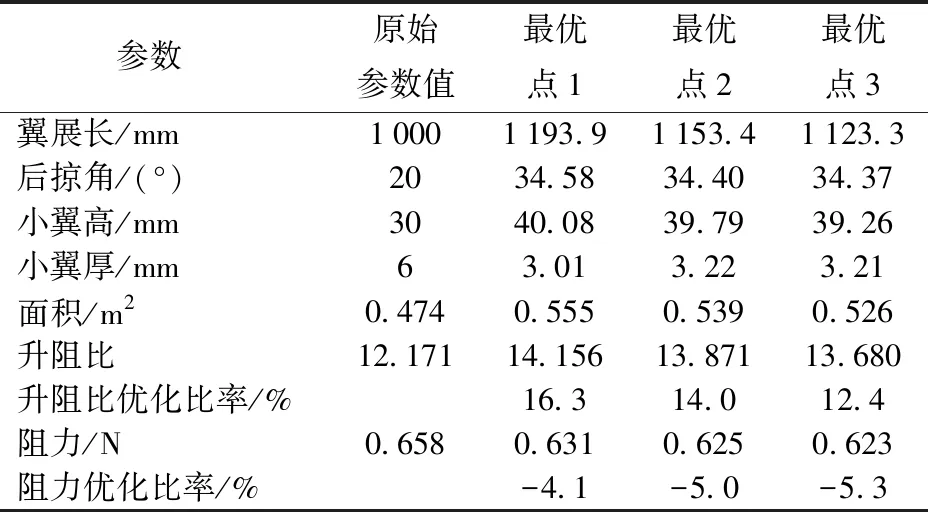
參數原始參數值最優點1最優點2最優點3翼展長/mm10001193.91153.41123.3后掠角/(°)2034.5834.4034.37小翼高/mm3040.0839.7939.26小翼厚/mm63.013.223.21面積/m20.4740.5550.5390.526升阻比12.17114.15613.87113.680升阻比優化比率/%16.314.012.4阻力/N0.6580.6310.6250.623阻力優化比率/%-4.1-5.0-5.3
3 結論
(1)利用CFD對25組樣本點的升阻比和阻力進行了數值模擬,樣本模擬數據、風洞模型模擬數據和試驗數據的對比分析表明,樣本與風洞模型的相對誤差小于2.7%,風洞模型與試驗的相對誤差小于7.3%,樣本與試驗的相對誤差小于8.0%,說明數值模擬方法可靠,可以用于尾座式無人機的外流場模擬。
(2)構建了結構參數與升阻比和阻力的響應面模型,模型相對誤差小于3%;基于響應面模型的敏感性分析結果表明,在阻力方面翼展長和小翼厚為正效應,后掠角和小翼高為負效應,其中翼展長為主要影響因素;在升阻比方面,翼展長和小翼高為正效應,后掠角和小翼厚為負效應,其中翼展長和小翼厚為主要影響因素。
(3)升阻比隨著翼展長和小翼高的增加而增大,后掠角和小翼高對升阻比的影響較小,當攻角為4°~8°時,升阻比隨小翼厚的增加而減小,當攻角為10°~12°時,升阻比隨小翼厚的增加而增大;阻力隨著翼展長和小翼厚的增加而增大,隨小翼高的增加而減小,隨后掠角的增加先增大后減小。
(4)利用多目標遺傳算法確定了尾座式無人機的最優結構參數為:翼展長1 123 mm、后掠角34°、小翼高39 mm、小翼厚3 mm。與原始樣機相比升阻比提高了12.4%,阻力降低了5.3%。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
現代企業(2015年9期)2015-02-28 18:56:50