船舶起重臂自動預警裝置技術研究
2019-06-03 06:04:30陳振鋒孟偉玉敬洋蔣忠全彭勇輝
中國設備工程 2019年9期
陳振鋒,孟偉玉,敬洋,蔣忠全,彭勇輝
(中鐵隧道集團三處有限公司,廣東 深圳 518048)
1 工程概況
深中跨江通道全長24.03km,北距虎門大橋約30km,南距港珠澳大橋約38km,起于深圳市寶安機場南,與廣深沿江高速相接,設機場樞紐互通立交,終于中山市翠亨新區(qū)馬鞍島,與擬建中開高速及規(guī)劃東部外環(huán)高速相接,設橫門樞紐互通立交。總體為東隧西橋,設計時速100km/h、雙向八車道。跨海段長22.390km,陸地段長1.64km。主線橋梁總長16985m,隧道長6870m,海中設置東、西兩處人工島。標段工程由東人工島、島上主線隧道與堰筑段隧道、機場互通匝道隧道、救援碼頭、島上建筑及島內(nèi)道路、市政、園林綠化和中山馬鞍島營地工程等組成,東人工島范圍內(nèi)沿江高速長約1.2km,橋下凈空約15.18m,共有40跨橋墩承臺受其填島影響。
在東人工島施工之前,對沿江高速下的40跨橋墩承臺進行鋼圍堰采用鋼管樁和鋼板樁保護。施工采用船舶+履帶式汽車吊+靜壓植樁機機/機械手打樁機,在橋下凈高15.4~18.5m,海上起重吊裝高度受到嚴重限制,以及施工區(qū)域的局限性,起重作業(yè)人員操作難度相當大,對于吊車大臂頂部與橋面之間的距離憑借肉眼觀察,難以保證觀測數(shù)據(jù)的準確性,多次出現(xiàn)吊臂碰撞橋面的擦傷。為了使橋樁保護施工安全可靠的運行,特設計一種起重吊裝自動預警裝置,用于起重吊裝的安全輔助。以聲音或屏幕顯示,直觀地告知操作司機吊車大臂頂部與橋面之間的距離,解除了操作司機及起重指揮人員肉眼觀測吊車大臂頂部與橋面之間距離的誤差,大幅度降低了吊車大臂頂部與橋面接觸的可能性,確保橋樁保護安全施工。
2 起重吊裝自動預警裝置
2.1 起重吊裝自動預警裝置設計方案
本設計主要采用自動控制系統(tǒng)和超聲波探測技術,履帶式起重機在進行起重吊裝作業(yè)時,超聲波探頭發(fā)送超聲波,遇到障礙物,產(chǎn)生回波信號,傳感器接收到回波信號后經(jīng)控制器進行數(shù)據(jù)處理,從而計算出吊車大臂與橋面之間的距離,再由顯示屏和蜂鳴器發(fā)出警示信號,提醒操作司機注意吊車大臂與橋面之間的距離,避免吊車大臂與橋面發(fā)生碰撞,見圖1。
2.2 起重吊裝自動預警裝置設計基本參數(shù)要求(表1)
2.3 起重吊裝自動預警裝置技術參數(shù)

圖1 系統(tǒng)總體結(jié)構(gòu)框圖
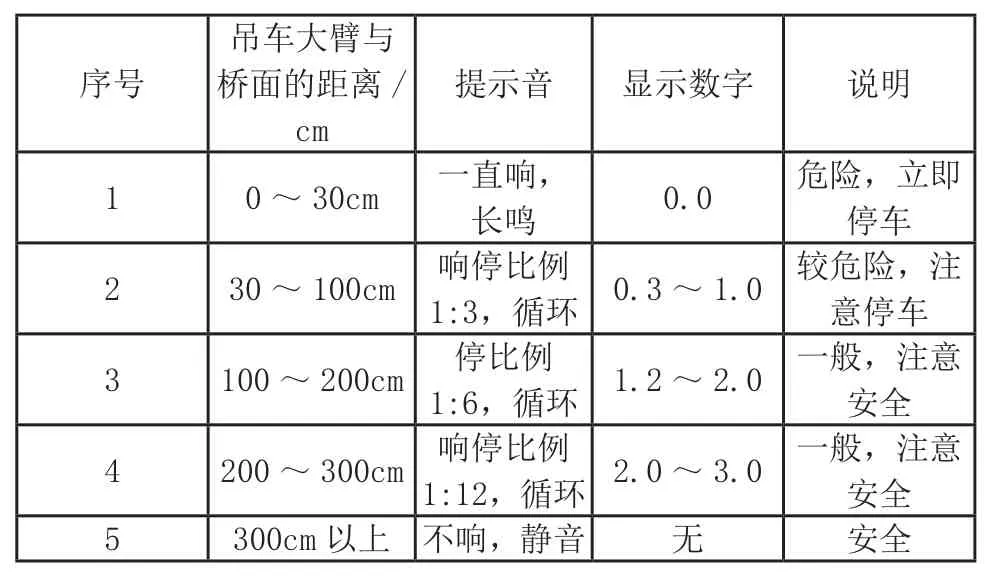
表1 設計基本參數(shù)要求
額定電壓:直流12V/24V;工作溫度:-30~+70℃;反映時間:0.05秒/探頭;探測距離:0~3m;探測角度:XY=60~80°。
2.4 起重吊裝自動預警裝置所需配件
主機控制盒1個;顯示器1個;攝像頭1個;蜂鳴器1個;超聲波探頭8個;24V直流電源1個;電源線1條;四芯延長線2條;攝像頭延長線1條。
3 主機控制盒的設計原理
主機控制盒是整個起重吊裝自動預警裝置的核心,整個主機盒由微處理器、超聲波發(fā)射器、超聲波接收器、顯示電路等組成,微處理器向超聲波發(fā)射器發(fā)出信號,超聲波發(fā)生器發(fā)出電磁波,超聲波發(fā)出后遇到障礙物反射回來,被超聲波接收器接受,超聲波接收器將接受到的回波信息反饋到微處理器,微處理器根據(jù)測距公式對所接收到的信息進行處理,并將測距數(shù)據(jù)發(fā)送到顯示電路,顯示線路將測距結(jié)果顯示出來。
4 起重吊裝自動預警裝置的安裝
(1)起重吊裝自動預警裝置安裝原理(圖2)。
(2)在起重機大臂4個角頂端5~6cm處安裝8個超聲波探頭(避免因探頭數(shù)量過少,存在探測盲區(qū)),安裝超聲波探頭的周圍應無障礙物,超聲波探頭發(fā)射的超聲波能夠順利到達橋面。探頭、主機盒安裝位置示意圖如圖3、圖4所示。
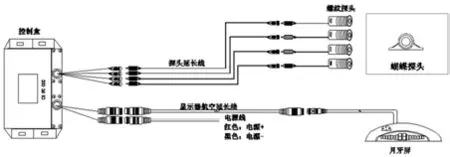
圖2 起重吊裝自動預警裝置安裝原理

圖3 超聲波探頭、主機控制盒安裝位置示意圖

圖4 超聲波探頭安裝示意圖
(3)在距離起重機吊臂頂部5m左右,安裝起重吊裝自動預警裝置——主機控制盒(圖5)。
在沿江高速橋墩保護施工過程中,起重機除了吊裝鋼板樁、鋼管樁之外,還需要吊裝液壓振動錘施打鋼板樁和鋼管樁,因此主機控制盒應該裝置在震動較小的位置,避免因震動對主機控制盒造成太大影響,進而對整個起重吊裝自動預警裝置造成影響;另外,主機控制盒的安裝位置應做好防雨淋措施,避免雨水進入主機控制盒,對主機控制盒的電路造成影響。

圖5 主機控制盒安裝示意圖
(4)在起重機駕駛室的右上方安裝起重吊裝的預警裝置,本預警裝置有數(shù)字顯示屏和蜂鳴器組成,數(shù)字顯示屏顯示吊車大臂頂部距橋面的距離,蜂鳴器由主機控制盒控制,主機控制盒根據(jù)吊車大臂距離橋面頂部的距離向蜂鳴器發(fā)出不同的控制信號,控制蜂鳴器的聲響。
(5)整個起重吊裝自動預警裝置所需的電源為直流12V/24V,通過電源線將起重吊裝自動預警裝置與起重機的電瓶電源相接。
5 起重吊裝自動預警裝置的調(diào)試
為了確保起重吊裝自動預警裝置靈敏、有效、可靠,在沿江高速橋墩保護施工過程中,能夠真的起到自動預警的作用,需對起重吊裝自動預警裝置進行調(diào)試,調(diào)試方法為:利用測量組的專業(yè)測量儀器——全站儀,對起重吊裝自動預警裝置顯示的數(shù)據(jù)進行復核,通過對兩個數(shù)據(jù)的對比,分析起重吊裝自動預警裝置的可靠性。
測試過程:起升汽車起重機的大臂,當顯示屏顯示的數(shù)據(jù)為2.9時,停止起升;然后,用全站儀測量吊車大臂頂部距橋面底部的距離,并記錄兩個數(shù)據(jù);繼續(xù)起升汽車起重機的大臂,當顯示屏顯示的數(shù)據(jù)為1.9時,用全站儀測量吊車大臂頂部距橋面底部的距離,并記錄兩個數(shù)據(jù);繼續(xù)起升汽車起重機的大臂,當顯示屏顯示的數(shù)據(jù)為1.1時,用全站儀測量吊車大臂頂部距橋面底部的距離,并記錄兩個數(shù)據(jù);繼續(xù)起升汽車起重機的大臂,當顯示屏顯示的數(shù)據(jù)為0.9時,用全站儀測量吊車大臂頂部距橋面底部的距離,并記錄兩個數(shù)據(jù);繼續(xù)起升汽車起重機的大臂,當顯示屏顯示的數(shù)據(jù)為0.28時,用全站儀測量吊車大臂頂部距橋面底部的距離,并記錄兩個數(shù)據(jù)。
測試數(shù)據(jù)記錄如表2。

表2
測試數(shù)據(jù)分析:隨著吊車大臂的提升,起重吊裝自動預警裝置顯示屏的數(shù)據(jù)與全站儀測量的數(shù)據(jù)偏差越來越大,造成的原因是由于超聲波探頭安裝的位置距離吊車大臂頂端相距5cm,假設超聲波探頭安裝位置的水平方向與吊車大臂之間的夾角為θ,超聲波探頭的位置距吊車大臂頂端的垂直距離為h,則h與θ之間的關系為:
由h和θ的關系式可以看出:0°≤θ≤90°之間,h隨之θ的增大而增大。在吊車大臂起升過程中,θ的角度會逐漸增大,進而導致超聲波探頭的位置距離吊車大臂頂部的距離也相應增大,所以:隨著吊車大臂的提升,起重吊裝自動預警裝置顯示屏的數(shù)據(jù)與全站儀測量的數(shù)據(jù)偏差越來越大。
由上述的理論分析可以得出,顯示屏顯示的數(shù)據(jù)絕對不能少于0.05,另外,考慮到8個超聲波探頭安裝的位置距離吊車大臂頂端的距離不可能是絕對的5cm;海水波動導致船舶和履帶式汽車吊的波動;吊車大臂起升的速度等多方面原因,要求顯示屏顯示的數(shù)據(jù)低于0.3時,吊車大臂應嚴禁起升。
6 結(jié)語
深中通道S03標沿江高速鋼圍堰施工過程中,在役橋梁低凈空條件下,進行起重吊裝作業(yè),采用起重吊裝自動預警裝置,能夠直觀地顯示履帶式汽車吊大臂頂部與沿江高速橋面之間的距離,避免了傳統(tǒng)人眼觀測的盲區(qū)和不準確性,方便操作司機更安全地進行起重吊裝作業(yè),為沿江高速鋼圍堰施工提供了一定的安全保證。起重吊裝自動預警裝置為以后類似的低凈空條件下進行起重吊裝作業(yè)提供了很好的借鑒。