大數據關聯規則在農用挖掘機上的應用研究
2019-05-27 08:44:46張鵬宇
農機化研究 2019年8期
張鵬宇
(河南職業技術學院,鄭州 450000 )
0 引言
農用挖掘機是用來進行農田水利基礎建設及小型土方作業的挖掘機械。部分農用挖掘機是將挖掘裝置安裝在拖拉機上,以拖拉機為平臺和動力來源,其它的則具備專用動力、行走裝置和結構部件,屬于專用挖掘機組[1]。農用挖掘機根據行走裝置可以分為輪式和履帶式,根據鏟斗可以分為反斗和正斗。無論哪種類型,鏟斗容量、標定功率和整機質量都是3個重要的性能參數。農用挖掘機的靈活性強,適應性好,購買和使用成本較低,成為農業和農村建設不可或缺的機械。
近年來,我國農村發展加速,農業結構調整日益深化,工程作業和設施建設全面開展。同時,農村的人口大量轉移,造成了勞動力嚴重短缺的局面,也推動了農用挖掘機的需求增加。我國的農用挖掘機廠主要集中在天津和河北地區,目前已經形成生產規模的超過50家,每年的銷售量達到了30萬臺。但是,我國缺乏農用挖掘機的行業技術標準,相關的安全使用規范也沒有完善,導致各企業生產的農用挖掘機質量和技術水平參差不齊,作業效率和售后保障與工程挖掘機差距較大。農用挖掘機的生產廠家較多,各自的型號差異很大,技術參數的匹配雜亂。另外,由于經濟效益有限,企業的技術研發人員和投入都較少,產品發展的后勁不足[2]。因此,加強行業整合,制定和規范相應的技術標準并加大研發投入,是改善農用挖掘機當前所面臨困局的有效措施。
工作裝置是農用挖掘機性能的重要決定因素,人們對工作裝置的研究主要集中在虛擬仿真和力學分析上。樊建榮等對農用挖掘機鏟斗的動力學進行聯合仿真,得到動力參數曲線,可為優化設計和自動控制提供依據[3]。秦貞沛等建立了工作裝置的虛擬樣機,增強了建模能力并進行了運動學分析[4]。鄭東京等建立了工作裝置的三維模型和虛擬樣機,通過動力學分析得到了鉸接點受力的變化曲線[5]。李浩等在對典型工況分析的基礎上建立工作裝置的三維模型,并進行靜力學的強度和應變分析,有助于無損檢測和設計改良[6]。這些研究有助于改善農用挖掘機的結構設計,若要全面提升性能水平,還需要引入各種新型的技術方法。
農用挖掘機的三維建模和虛擬仿真過程中涉及到大量數據信息的處理,常規的分析方法難以實現,利用大數據技術則可以獲得良好的效果。大數據是指在一定時間內無法通過普通軟件來捕獲和管理的數據集合,其特點體現在規模性、多樣性和高速性上。大數據的規模非常龐大,能夠達到PB甚至EB的級別。大數據的類型多樣,包括結構化、半結構化和非結構化的數據形式。高速性是指數據處理速度快,可以實現對龐大數據量的實時分析。
大數據自誕生起便引起了人們的關注,開始僅為商業和金融服務,隨后應用范圍迅速擴展到地球空間信息學[7]、物流服務[8]、經濟發展狀況[9]和智能電網[10]等領域。作為一種新型信息技術,大數據不僅促進了社會變革,還推動了科學研究層次的深入,具有極大的發展空間和應用潛力。
大數據的應用價值取決于對數據中所隱含信息規律的挖掘能力,關聯規則算法可以從大量信息中找出頻繁項集和關聯知識,是大數據挖掘的主要方法[11]。關聯規則研究的核心在于提高規則挖掘效率的同時,盡可能地減少計算量,并加快算法的運行速度。大數據的關聯規則挖掘流程包括原始數據收集、數據分析、模式建立和信息提取,已經應用在電商、醫療、市場營銷和金融等領域[12-13]。在具體算法上,張忠林等提出了一種關聯規則并行分層挖掘算法,建立的模型證明其具有高效性[14]。周輝宇針對交通擁堵的問題,從大數據角度建立模型,利用時間序列規則挖掘其中的規律,研究結果可以為交通擁堵治理提供參考[15]。
目前,大數據已經開始與農業機械結合,各種農機的應用和服務大數據平臺也逐步建成,開啟了農業機械發展的新局面。本文將大數據的關聯規則算法應用在農用挖掘機上,對工作裝置作業過程中各部件應力和運動的關聯規則進行挖掘,以便為工作裝置的優化設計和挖掘機自動控制提供依據。
1 機械設備和模型
1.1 機械設備
本研究采用的機械設備為XN977-2L型輪式農用挖掘機,整車質量7 000kg,發動機功率51kW。鏟斗容量0.3m2,最大挖掘半徑6 000mm,挖掘高度5 919mm,挖掘深度3 400mm。挖掘機的工作裝置為反鏟斗式,各部位的應力通過濟南博納的BN-SM200型應力應變檢測系統進行測量。同時,還在工作裝置的多個部位安裝光學檢測標識,用于檢測各個部件在作業過程中的位移和變形情況。
1.2 工作裝置模型
挖掘機工作裝置的主要構件為動臂、斗桿、鏟斗、動臂油缸、斗桿油缸和鏟斗油缸,還有附屬結構搖臂、連桿和銷軸等。工作裝置的三維模型通過Pro/E軟件建立,以實際尺寸為依據,根據分析要求進行旋轉和拉伸成為CAD實體模型,如圖1所示。為了簡化分析過程,將各驅動油缸、搖臂和連桿通過布爾運算合并為一個部件,并且不考慮銷軸的摩擦力。
Pro/E軟件建立的CAD模型導入ADAMS軟件中,設置各部件的質量和屬性,然后修改顏色以便區分。各部件之間的鉸接點用空心圓表示,共有11個。其中,8個為旋轉副,約束部件的5個自由度,另外3個為點線副。應力的測量點包括鏟斗齒尖、鏟斗底部、動臂油缸鉸接點、斗桿油缸鉸接點及斗桿與動臂連接銷軸等位置,光學檢測標識則安裝在11個鉸接點上。檢測系統采集數據信息組成工作裝置作業的大數據,并形成應力云圖、位移云圖和變形云圖,用于后續的關聯規則挖掘。
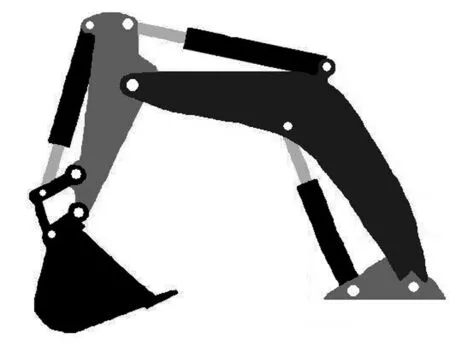
圖1 挖掘機工作裝置的實體模型
2 大數據的關聯規則挖掘
關聯規則的挖掘是對工作裝置運行的大數據進行分析,發現其中的關聯并揭示各部件之間的應力、位移和變形規律。首先找出所有的頻繁項集(即反復出現的工作裝置各部件的應力、位移和變形數據),其出現的頻率大于預設的最小支持度計數;然后尋找應力、位移和變形數據在相同部件上或不同部件之間的強關聯規則,這些規則必須同時達到最小支持度和置信度的要求。尋找強關聯規則是通過劃分方法來實現的,即對工作裝置的大數據進行兩次掃描:第1次掃描把大數據劃分為多個相互之間沒有重疊的部分,各部分的最小支持度計數為大數據的閾值與該部分事件數的乘積;第2次掃描則估算各個關聯規則的支持度,獲得大數據頻繁項集之間的關聯。
根據農用挖掘機大數據的產生方式和結構特點,采用并行分層算法進行關聯規則的挖掘。在預處理階段,將整個大數據按照部件和參數類型分割成24個相互之間不重疊的區域,各區域的數據規模大致相當。區域之間沒有重疊,可以保證所有事件數據的重要性相同,被挖掘的概率一樣。因此,重復挖掘出現的頻率很低,提高了挖掘的效率和可靠性。作為工作裝置整體的一部分,各個部件的數據集合,以及應力、位移和變形的數據集合之間都存在緊密的聯系,表現為大數據分區中的并行部分,也是關聯規則出現頻率最高的區域。經過預處理,再并行挖掘各區域的頻繁項集,以局部頻繁項集作為候選項集,評估支持度和置信度,從而確定全局的頻繁項集,流程如圖2所示。每個區域都可以作為一個局部的大數據庫,并能進一步分為更小的區域,體現出分層挖掘的特性。
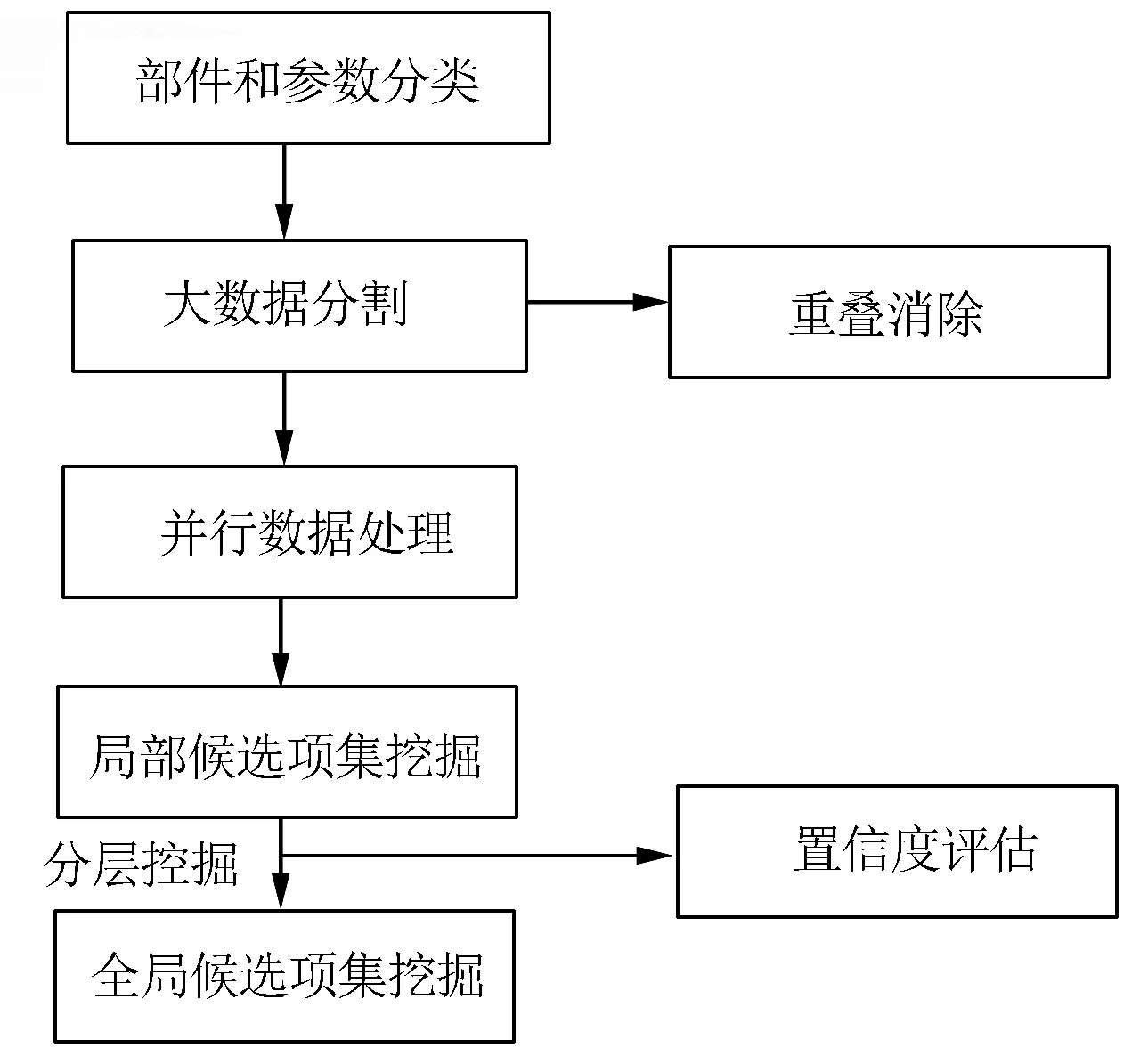
圖2 并行分層挖掘算法的流程
3 仿真分析
挖掘機工作裝置的仿真采用ADAMS軟件,靜力學仿真用于分析應力和變形。采集不同狀態下動臂、斗桿和鏟斗的位置信息,以及關鍵部位的應力大小,部分受力數值通過計算獲得,同時考慮重力加速度和邊界條件。
動力學仿真主要分析工作裝置的位移和所受的外力,形成不同作業環節中的大數據。挖掘過程中所受的土壤推力和摩擦阻力忽略不計,工作裝置的受力主要集中在鏟斗上,并依次向斗桿和動臂傳遞。外力的類型包括切向挖掘阻力、法向挖掘阻力和物料的重力:挖掘阻力為鏟斗齒尖中心處所受的集中力,法向挖掘阻力的方向與齒尖運動軌跡垂直。ADAMS軟件用STEP階躍函數來模擬挖掘阻力的變化過程,在挖掘的初期逐漸上升到最大值,然后迅速減小。在挖掘阻力變化的同時,物料重力從零逐漸增加到最大值。物料重力的方向始終豎直向下,可以模擬為單個質點作用在鏟斗的中心,產生的數據較為簡單。
4 結果分析
以對土壤的作業為例,通過應力、位移和變形的大數據挖掘發現,正常工作時工作裝置的斗桿油缸銷軸、斗桿和動臂連接處的應力最大。此外,動臂油缸的銷軸和斗桿的內側部分也有較大的應力。鏟斗底部在水平方向上具有最大的位移和變形,在沿著斗桿向動臂傳遞的過程中逐漸較弱。當斗桿油缸的兩個絞接點與斗桿動臂絞接點共同組成直角三角形時,挖掘的阻力值最大。動臂車架和動臂油缸兩個絞接點的受力變化規律相似,而斗桿動臂和斗桿油缸兩個絞接點的受力變化則沒有出現一致的規律。
5 結論
以XN977-2L型輪式農用挖掘機為平臺,利用Pro/E軟件建立工作裝置的CAD模型并導入ADAMS軟件中,采集應力、位移和變形的大數據。通過并行分層算法進行大數據的關聯規則挖掘,并且應用到ADAMS軟件的仿真分析上。最后,根據挖掘工作裝置在實際作業中的大數據信息,獲得了各部件的應力、位移和變形的關聯規則,可以為工作裝置的優化設計和農用挖掘機自動控制提供依據。
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:30
當代陜西(2021年17期)2021-11-06 03:21:36
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
當代陜西(2019年15期)2019-09-02 01:52:00
幸福(2018年33期)2018-12-05 05:22:42
學苑創造·A版(2018年11期)2018-02-01 06:29:20
Coco薇(2017年11期)2018-01-03 20:59:57
讀者(2017年5期)2017-02-15 18:04:18
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
