VR技術在農業機器人操作上的應用
2019-05-27 08:56:36張新昌
農機化研究 2019年11期
張新昌
(南京鐵道職業技術學院,南京 210031)
0 引言
近年來,我國對于農業領域智能控制的應用加大了研發力度,尤其在農業機器人的應用方面。同時,虛擬現實技術(簡稱VR技術)在國內外的機械、設計、影視、建筑等行業均得到了迅速的發展,如利用VR仿真技術對采摘機器人進行虛擬仿真,利用遠程監控方法對割草機器人進行實時監控,通過智能核心算法對圖像的識別與機器人準確定位,利用核心工作原理實現VR場景裝配可視化及生產遙控等。圖1為某試驗基地農業機器人作用場景,為了充分發揮當前計算機的虛擬技術水平,進一步提高農業機器人的應用廣泛性與便捷性,在當前研究理論的基礎上,將VR技術與農業機器人操作環節進行結合,展開深層次的探討。
1 機器人概述
農業機器人主要分為施肥機器人、除草機器人、采摘機器人及分揀果實機器人等,旨在提高農業生產收益率,降低人工勞動率。其通過氣動機構與電機旋轉機構、CCD攝像頭等設備實現在保證蘑菇完好性的狀態下完成采摘作業;在自然場景下通過R-G色差定位及約束算法實現蘋果目標匹配,通過測試所需作業空間,配備壓力傳感器、光電傳感器等實現蘋果高效率采摘。這其中大多數采用了以圖像信息處理為基礎的模式識別技術和以適合運動控制的智能算法為精準動作技術,關鍵核心技術集中在識別、定位、感應與控制方向。圖2為VR技術在農業機器人的核心應用構成,可表述為:通過用戶對農業機器人進行3D場景建模,建立與現實世界一致度為90%以上的虛擬作業環境,進而在中心控制模塊、傳感器模塊的作用下進行檢測與反饋動作,做出實時調整與同步控制。

圖1 農業機器人作業場景外觀圖Fig.1 Appearance diagram of the operation scene of the agricultural robot
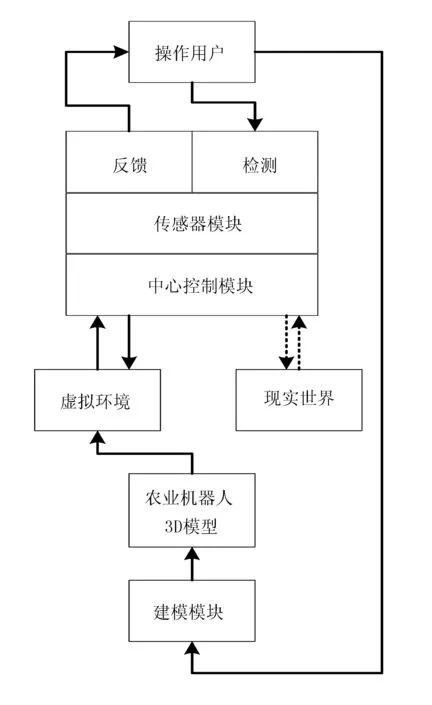
圖2 VR技術在農業機器人上的核心應用構成Fig.2 Core application composition of VR technology in agricultural robots
為實現VR技術與農業機器人操作可靠銜接,設定基于VR技術的農業機器人操作控制流程(見圖3),將這一應用過程依據實際工作需求劃分為任務層、狀態層與綜合控制層3個層次。任務層主要從VR視覺與定位、農業機器人靠近作物、進行作業操作和返回至指定位置4個動作環節展開,狀態層針對運動軌跡的生成與調節、算法與反應等操作起到良好銜接的效果,綜合控制體現了VR特征與操作決策、數據處理與行為控制等指令。
2 作業設計
2.1 數學模型建立
選定農業機器人運動的位姿,結合VR作業場景的特征,在農業機器人執行動作坐標系(見圖4)下,設(X,Y,P)為農業機器人運動坐標系,(x0,y0,o)為虛擬場景全局坐標系,對其操作執行核心環節建立運動模型。
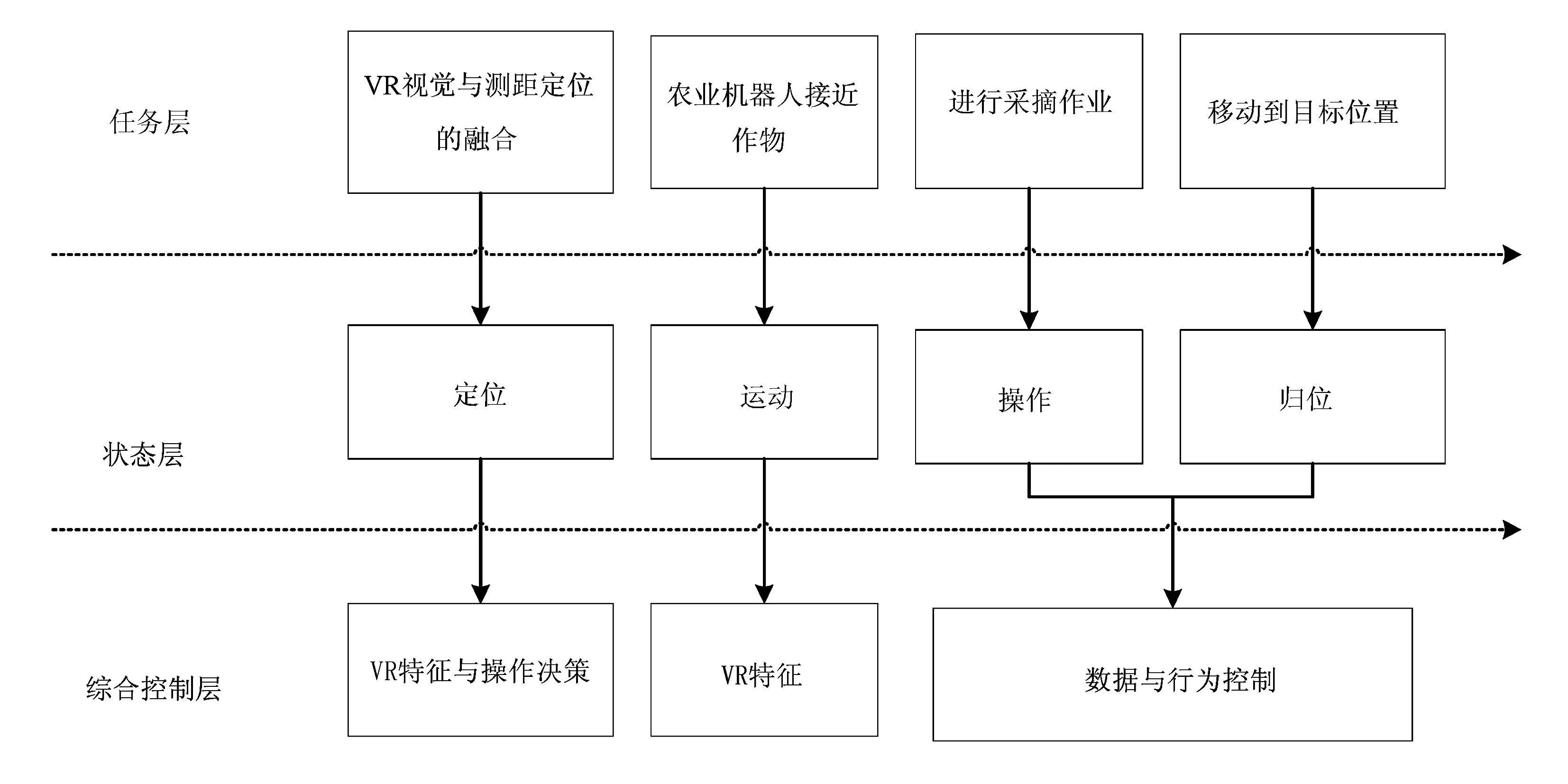
圖3 基于VR技術的農業機器人操作控制流程簡圖Fig.3 Brief diagram of operation control process of the agricultural robot based on the VR technology
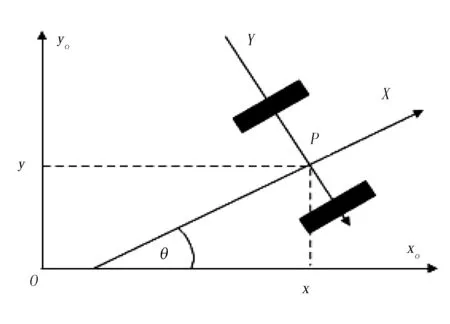
圖4 農業機器人執行動作坐標系Fig.4 Coordinate system of the operating actions of the agricultural robot
農業機器人運動臂沿直線運動時,有
(1)
農業機器人運動臂有彎度運動時,有
(2)
式中θ—農業機器人運動角度(rad);
vL—農業機器人運動線速度(m/s);
vR—農業機器人運動角速度(rad/s);
l—農業機器人運動輪距離(m);
t—農業機器人動作時間(s)。
利用圖像變換矩陣理論,得
(3)
(4)
(5)
(6)
式中ai—農業機器人運動臂長度(m);
di—農業機器人關節偏移量(m);
αi—農業機器人運動臂旋轉角度(rad);
θi—農業機器人關節彎曲角度(rad);
i—農業機器人運動臂編號;
C—余弦三角函數;
S—正弦三角函數。
2.2 VR建模設計
構建VR環境,主要從農業機器人本體和周圍場景兩大部分展開設計,首先通過三維繪圖軟件SolidWoks實現農業機器人核心部件尺寸的精確測量與配合測定,然后通過3DMAX完成作業場景的真實渲染。
建立如圖5所示的農業機器人在VR場景下的物理模型,并給出主要關鍵設計步驟,通過動作建模與場景設置實現VR作業平臺的合理搭建,進行應用探討。VR場景農業機器人操作建模設計如表1所示。
2.3 VR軟件控制
通過采用OpenGL實現硬件設置與軟件控制的準確銜接,軟件控制程序主要依據VC++編程理論展開。通過對農業機器人操作控制平臺進行合理劃分,分別形成虛擬場景、控制操作、路徑規劃、碰撞檢測與智能通訊5個核心控制執行程序,主要流程框圖如圖6所示。
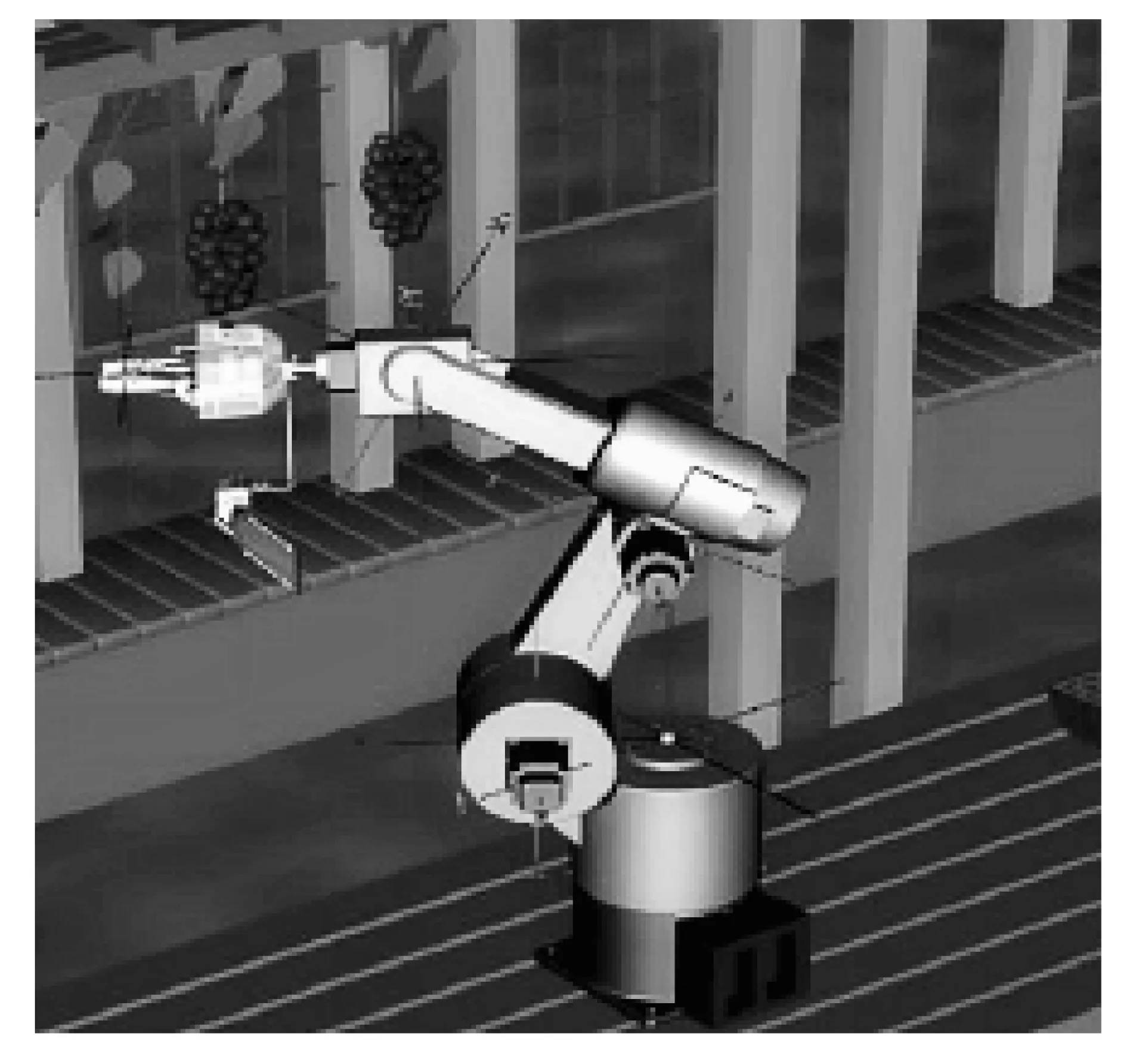
圖5 農業機器人在虛擬場景下的物理模型Fig.5 Physical model of the agricultural robot in virtual scene表1 VR場景農業機器人操作建模設計Table 1 Agricultural robot operation modeling design under the VR scene
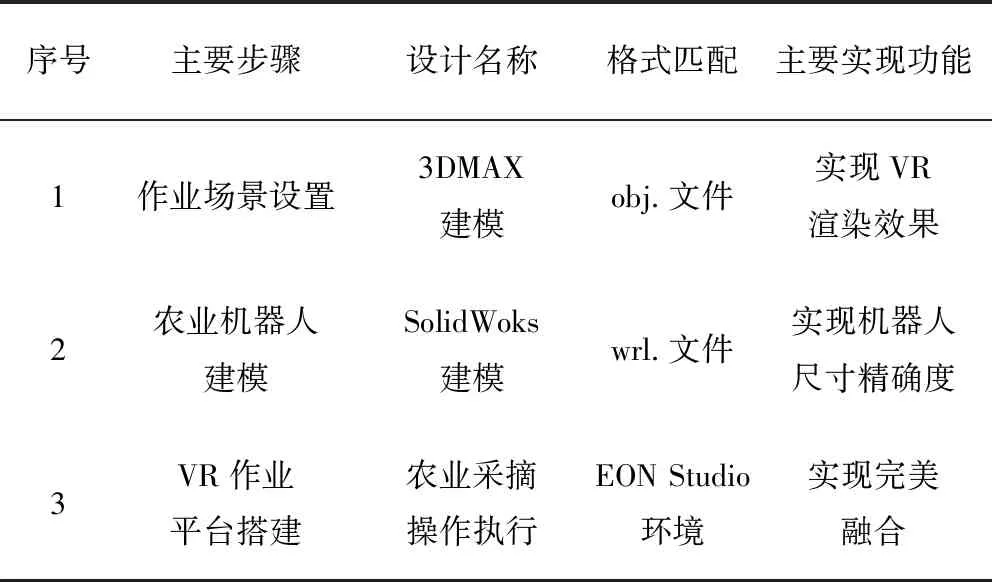
序號主要步驟設計名稱格式匹配主要實現功能1作業場景設置3DMAX建模obj.文件實現VR渲染效果2農業機器人建模SolidWoks建模wrl.文件實現機器人尺寸精確度3VR作業平臺搭建農業采摘操作執行EON Studio環境實現完美融合
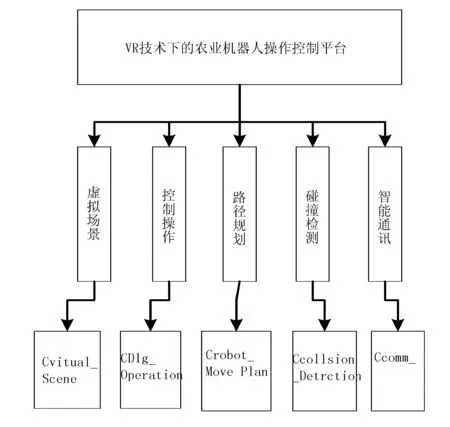
圖6 VR技術下的農業機器人操作軟件控制框圖Fig.6 Operating software control block diagram of the agricultural robot under VR technology
VR技術路徑的規劃利用農業機器人運動函數庫、采集信息分析與傳遞、中心控制綜合決策與智能通訊模塊等功能實現VR技術路徑的規劃,此次給出部分程序代碼如下:
Void Rotation::RMiddle(GLfloat array[ ])
{
for(int i = 0; i < MINSIZE; i++)
{
if(array[i]!= RMemberAngle[i])
{
RFreeN[i] = array[i] - RMemberAngle[i];
If(RFreeN[i] >= 0.0f && RFreeN[i] <0.1f‖
RFreeN[i] < 0.0f && RFreeN[i] > -0.1f)
{
RMemberAngle[i] = array[i];
if(if continue == 1)rcontinuous = 1;
}
RMemberAngle[i] += RFreeN[i] 160.0f;
}
}
}
3 應用試驗
3.1 場景設置
進行VR場景下的農業機器人操作試驗,該平臺包括硬件連線與軟件調控系統。通過一系列的條件變換,獲取VR試驗的目標參數,鑒于此,設置基礎條件為:
1)將攝像頭、壓力傳感器、超聲波傳感器、運動控制器及智能接口等調試好;
2)圖像識別、傳輸信息、動作監測等各環節的程序編制準確;
3)視頻捕捉與VR操作協調完整,整個VR作業場景連貫性好。
圖7為VR場景下農業機器人操作實現過程。將行為建模與運動軌跡規劃同步輸入,在核心控制算法和指令動作反應算法的信息融合之下,進行機器人的運動避障、移動、采摘、回歸原位等系列具體操作。
3.2 試驗分析
進行試驗,針對農業機器人從移動-定位-抓取-歸位一整套操作流程進行監測并記錄數據,共6次,如表2所示。由表2可知:基于此操作系統進行的試驗,動作路徑長度控制在200~300cm范圍內,其間選取的監測關鍵控制點數為35~45個范圍內,路徑的避障率可達83%以上,農業機器人的動作執行效果良好。
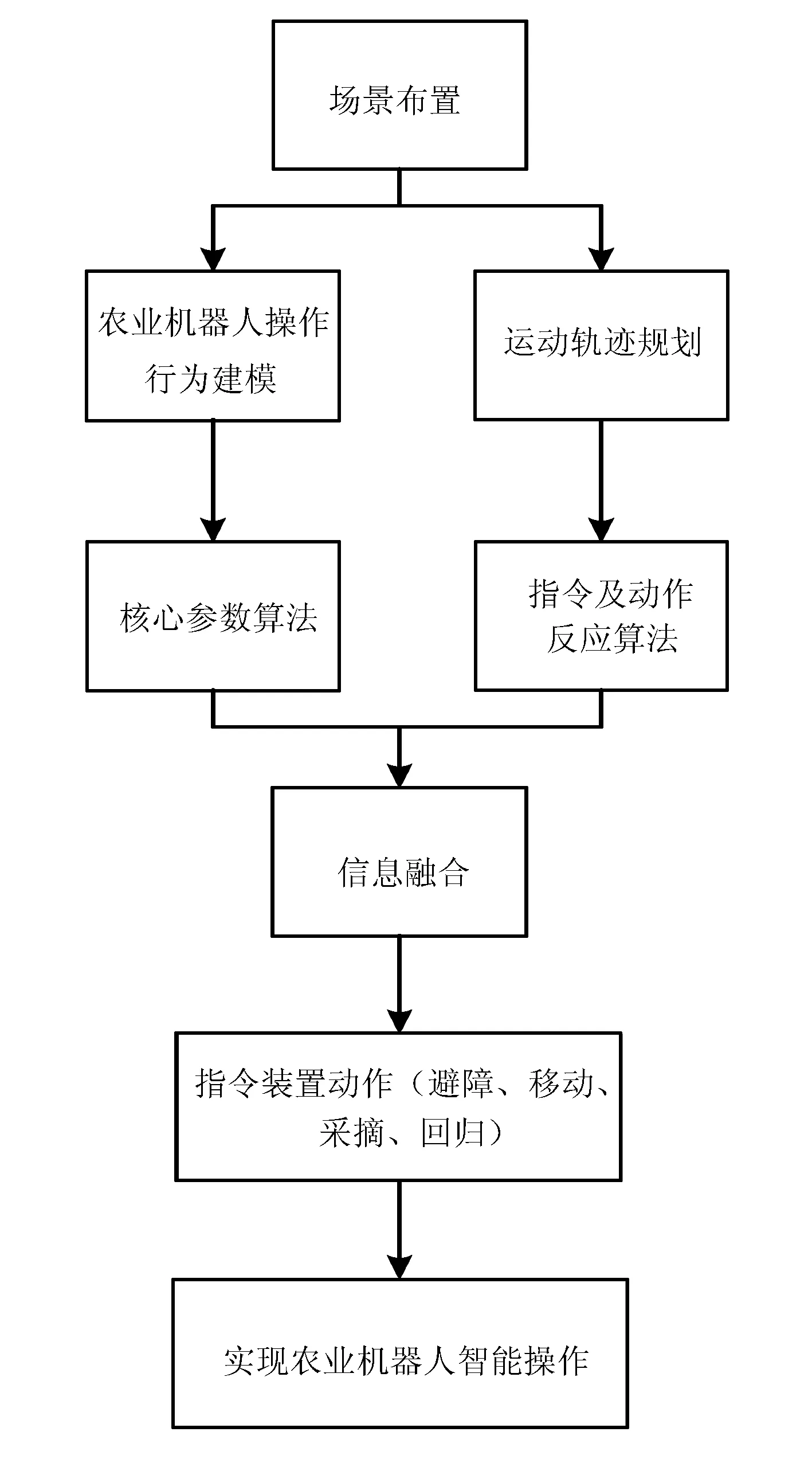
圖7 VR場景下農業機器人操作試驗Fig.7 Operation test of the agricultural robot under the VR scene表2 VR場景下農業機器人操作數據統計Table 2 Operation data statistics of agricultural robots in VR scene
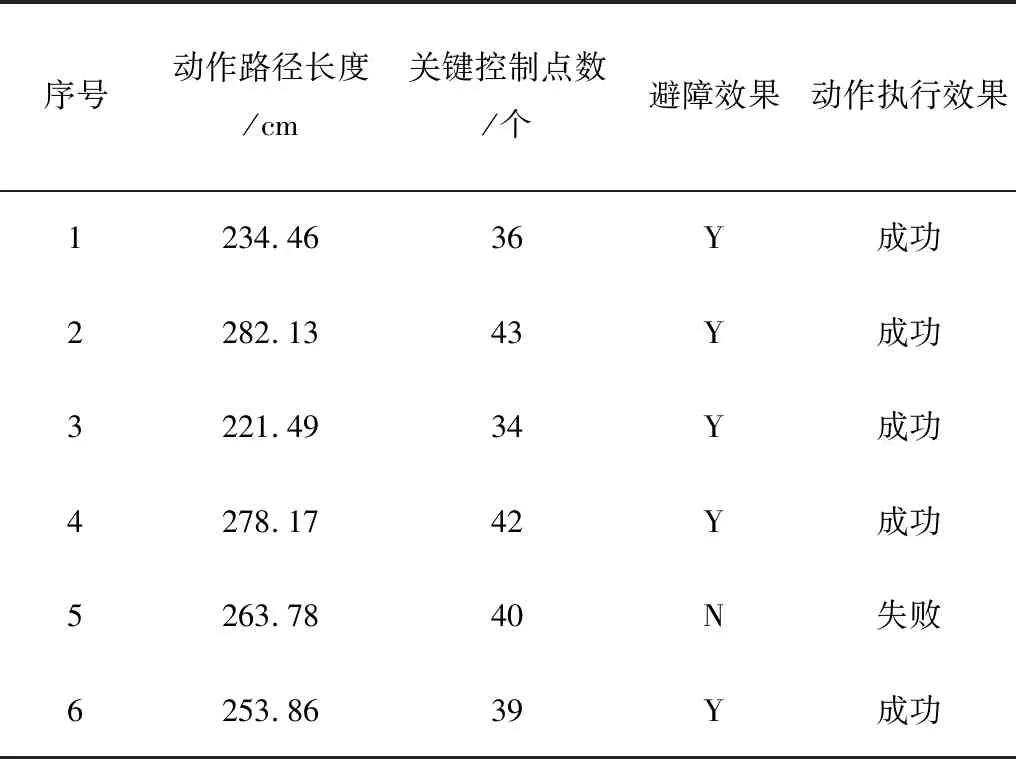
序號動作路徑長度/cm關鍵控制點數/個避障效果動作執行效果1234.4636Y成功2282.1343Y成功3221.4934Y成功4278.1742Y成功5263.7840N失敗6253.8639Y成功
試驗過程選取關鍵參數進行效果分析,形成如表3所示的農業機器人VR試驗效果表。由表3可知:在X向定位精度和Y向定位精度同時設定目標值為95%的基礎上,經換算處理的VR環境下指標分別為97.25%和96.75%,滿足設計要求;選定農業機器人的準確避障率和路徑執行準確率均符合96%的設計要求;經換算處理的VR環境下指標分別為96.95%和97.05%,整體應用效果滿足設計目標,表明對農業機器人操作應用VR技術的做法可行。
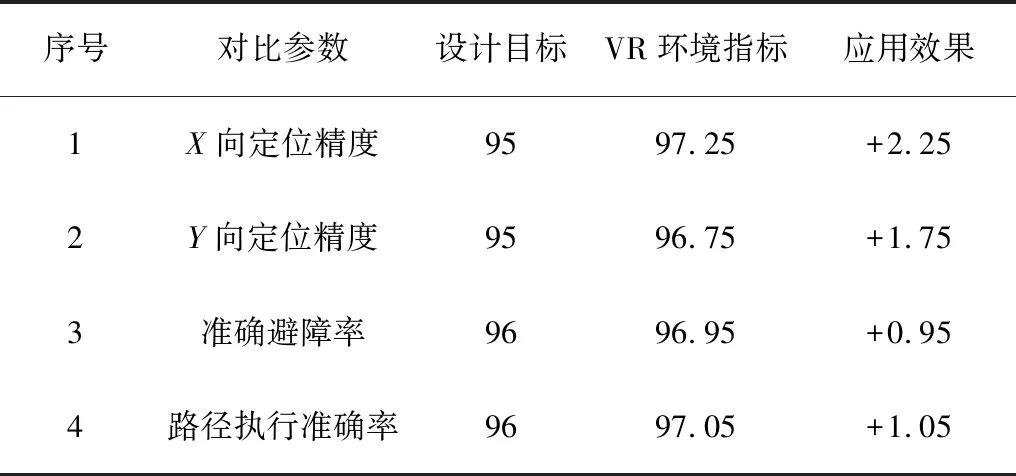
表3 農業機器人VR試驗效果Table 3 Test results of the agricultural robot in VR scene %
4 結論
1)通過將VR技術與農業機器人作業原理有效結合,對機器人操作場景進行模擬,創造一個接近現實的逼真作業環境。
2)根據農業機器人操作機理,建立運動部件的數學模型,通過SolidWorks形成三維建模并優化處理后導入3DMax進行場景加載與虛化,參數與核心算法進行后臺控制,實現VR試驗仿真。
3)基于VR技術的農業機器人操作過程平臺搭建,實現了機器人操作的可視化與準確化,VR試驗下的機器人避障率和路徑執行準確率均可達到95%以上。該應用研究可為基于VR技術的其他智能設備改進提供一定思路。
猜你喜歡
今日農業(2022年1期)2022-11-16 21:20:05
今日農業(2022年3期)2022-11-16 13:13:50
今日農業(2022年2期)2022-11-16 12:29:47
今日農業(2021年14期)2021-11-25 23:57:29
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37