懸軌式溫室綜合信息自動監測裝置的設計與實驗
2019-05-27 08:56:24張曉東毛罕平邱白晶左志宇高洪燕
農機化研究 2019年11期
張曉東,龔 鎮,毛罕平,邱白晶,左志宇,高洪燕
(江蘇大學 農業裝備與技術教育部重點實驗室,江蘇 鎮江 212013)
0 引言
目前,我國的溫室種植面積和產量位于全世界前列,但大多仍采用傳統的大水大肥的種植灌溉模式,因其具有盲目性,無法滿足作物需求,導致作物的產量和品質不高、資源浪費嚴重及經濟效益較差等問題。其主要原因之一是缺乏對設施生產的科學管理,難以實時在線獲取溫室作物和環境的綜合信息,實現基于作物真實需求的水肥和環境優化調控以及病蟲害預警[1]。以往對農作物的營養長勢和病蟲害侵害的識別檢測多采用人工以及化學方法,不僅檢測效率低下,而且會發生誤判,會對作物造成不可逆的損壞。
為了提高溫室作業的效率,目前國內外學者開發了許多結構各異、功能不同的設施平臺。徐瑞峰等根據溫室存在施藥裝備短缺、施藥勞動強度大等問題,設計開發了一種高效的風送施藥車,主要由軌道式移動平臺、電能輸送裝置、升降噴霧裝置和基于PLC的控制系統組成[2]。該裝置達成了在溫室壟行種植模式下,施藥車自動遠距離、大面積施藥的目標,既能提高溫室施藥效率,又避免了化學藥劑對溫室管理人員造成傷害。北京農業智能裝備技術中心的馬偉等人開發了一套溫室軌道式省力作業裝置[3]。該裝置能夠通過在溫室自身結構上連接安裝軌道,利用移動裝置可用手推靈活行走,懸掛平臺上可以搭載所有施藥加壓裝置,解決了溫室作物大面積施藥及搬運不方便和人工勞動強度大的問題;但其仍需一定的手動作業,自動化水平還不夠高。Subramanian設計了一種溫室噴霧六輪轉向車,由電源、噴霧罐、泵、直流電機和吊桿等組成,且使用雷達作為行走指向器,利用RMS和平均瞬時誤差法統計了雷達指向的行駛誤差,結果表明采用小車行走精度較高[4]。Sammons設計了一種溫室自主移動機器人,能在炎熱潮濕的玻璃溫室內噴灑農藥,減少了溫室密閉空間內噴灑有毒化學物質對人體的傷害,實現了害蟲控制和疾病預防[5]。
綜上所述,現有的智能移動平臺由于任務目標不同,其裝置和方法無法滿足溫室結構化環境下,溫室作物生長和環境信息檢測設備對平臺檢測精度及平穩性的要求,難以實現對不同生長期、不同種類和大中小不同株型作物的營養、長勢和病蟲害信息的自動巡航探測。目前,滿足實際生產需求的、先進適用的溫室環境和作物綜合信息自動化監測裝備和方法缺乏。本裝置采用懸軌式檢測平臺進行作物生長和環境信息的自動監測,主要由軌道梁總成、行走機構、滑動平臺、多傳感器系統、控制柜組成。該平臺能夠通過自主巡航的方式,采用多傳感器探測系統進行溫室作物營養、水分、長勢、病蟲害和環境綜合信息的采集,相較于傳統方法和分布式的檢測方法,提高了檢測和識別精度,降低了成本,提高了作業效率。
1 裝置的總體設計
1.1 裝置總體結構設計
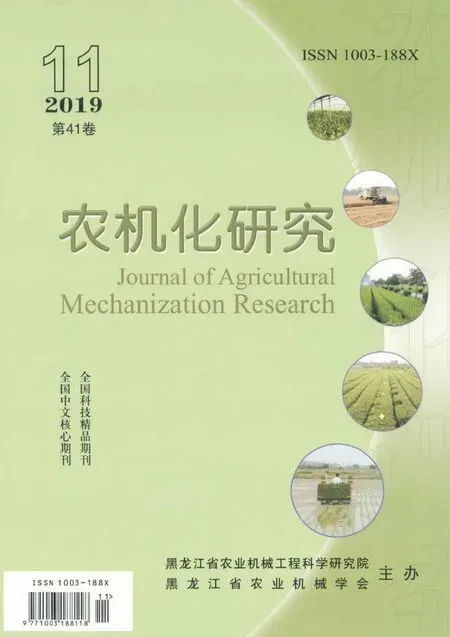
為了不影響作物的生長,本裝置采用懸軌式結構,將裝置布置于溫室作物生長土槽的正上方,使其既能準確地采集作物及溫室環境信息,又不影響作物的生長,如圖1所示。懸軌式溫室綜合信息自動巡航監測裝置包括軌道梁總成、行走機構、滑動平臺、多傳感器系統及控制柜總成。軌道梁總成由左中右3部分組成,左中右3部分分別有上下兩層結構組成,懸掛固定在溫室的橫跨結構梁上。行走機構與軌道部分的滑移軌道和齒條連接,包括一套齒輪齒條機構和一套滑輪滑軌機構。滑動平臺主體主要由升降剪叉和電控旋轉云臺組成,由行走機構帶動行走。多傳感器系統裝在電控旋轉云臺底部,用來檢測溫室環境和作物的綜合信息。控制柜部分獨立固定于溫室前端,通過485數據線分別和行走機構、滑動平臺及多傳感器系統相連,進行信息交互,且通過電源線為行走機構、滑動平臺及多傳感器系統提供電源。
1.橫撐 2.懸掛輔梁 3.齒條 4.懸掛主梁 5.滑移軌道 6.升降連接板 7.電源 8.DSP運動控制器 9.升降剪叉 10. 旋轉云臺 11. 光照強度傳感器 12.齒輪 13.減速電機圖1 監測裝置總體結構圖Fig.1 Overall structure map of the monitoring device
1.2 裝置工作流程
裝置系統初始化并設置系統參數之后,系統DSP控制器根據工控機發來的位置指令,首先發送信號給減速電機;減速電機帶動齒輪軸和齒輪一起轉動,齒輪和齒條嚙合,帶動整個滑動平臺通過滑輪在滑軌上移動順序到達作物的上方,并根據預設的地標傳感器位置和序號,采用逐點探測的方式進行作物多傳感信息的探測;將信息由信息采集模塊作為輸入參數,導入工控機的處理程序,并實時顯示在觸摸屏上。
2 關鍵部件設計
2.1 軌道梁總成總體設計
結合溫室的結構特點及裝置的經濟性要求,軌道梁總成由左中右3部分鋁型材組成。
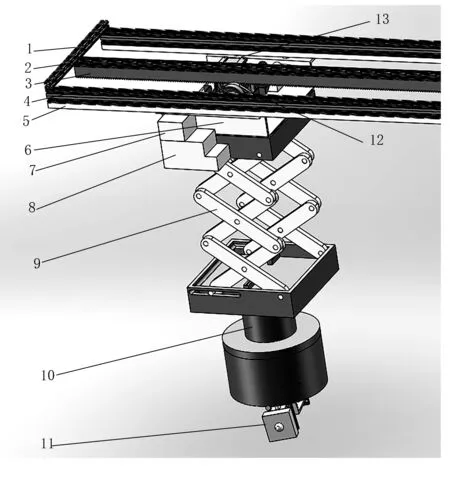
左右兩部分由相互平行的懸掛主梁和滑移軌道組成,懸掛主梁為平行結構,左右各1根,間距700mm,左右主梁長度均為18m,分別由3根6m長的30mm×60mm鋁型材組成。懸掛主梁下方固定有滑移軌道,為滑動平臺和行走機構的滑動軌道,左右滑移軌道同樣長度為18m,分別由長6m的3根不銹鋼軌道組成,滑移軌道長度方向每隔500mm通過T型螺栓螺母與懸掛主梁緊固連接。
在與懸掛主梁的平行中線上,安裝有懸掛輔梁,懸掛輔梁由長6m的3根30mm×30mm鋁型材構成,其下方通過T型螺釘固定有齒條,齒條長18m,由6根3m長的齒條固定連接組合而成。
懸掛主梁和懸掛輔梁之間,為了保持直線度和結構的剛度,在軌道長度方向上,使用橫撐通過T型螺栓螺母對懸掛主梁和懸掛輔梁進行緊固連接,使懸掛主梁和懸掛輔梁成為一體,保證其結構剛度;在懸掛主梁和懸掛輔梁所使用的6m型材連接的接縫處,采用連接板通過T型螺栓螺母對懸掛主梁和懸掛輔梁進行緊固連接,以保證滑動平臺沿滑移軌道運行時,在接縫處能夠平滑過渡。 軌道梁總成結構如圖2所示。
1.滑移軌道 2.懸掛主梁 3.橫撐 4.懸掛輔梁 5.齒條 6.連接板圖2 軌道梁總成Fig.2 Rail beam assembly
2.2 行走機構的設計
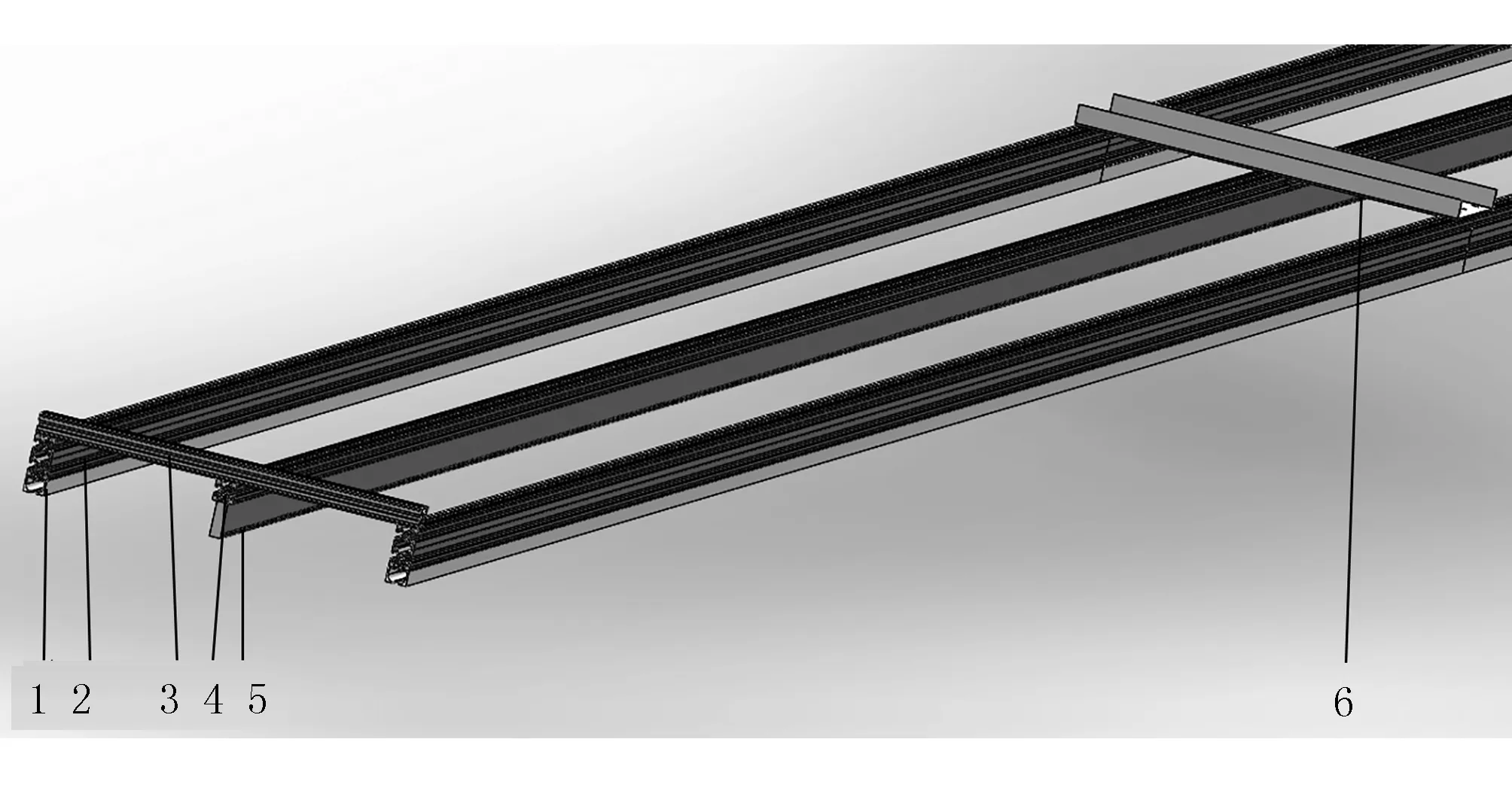
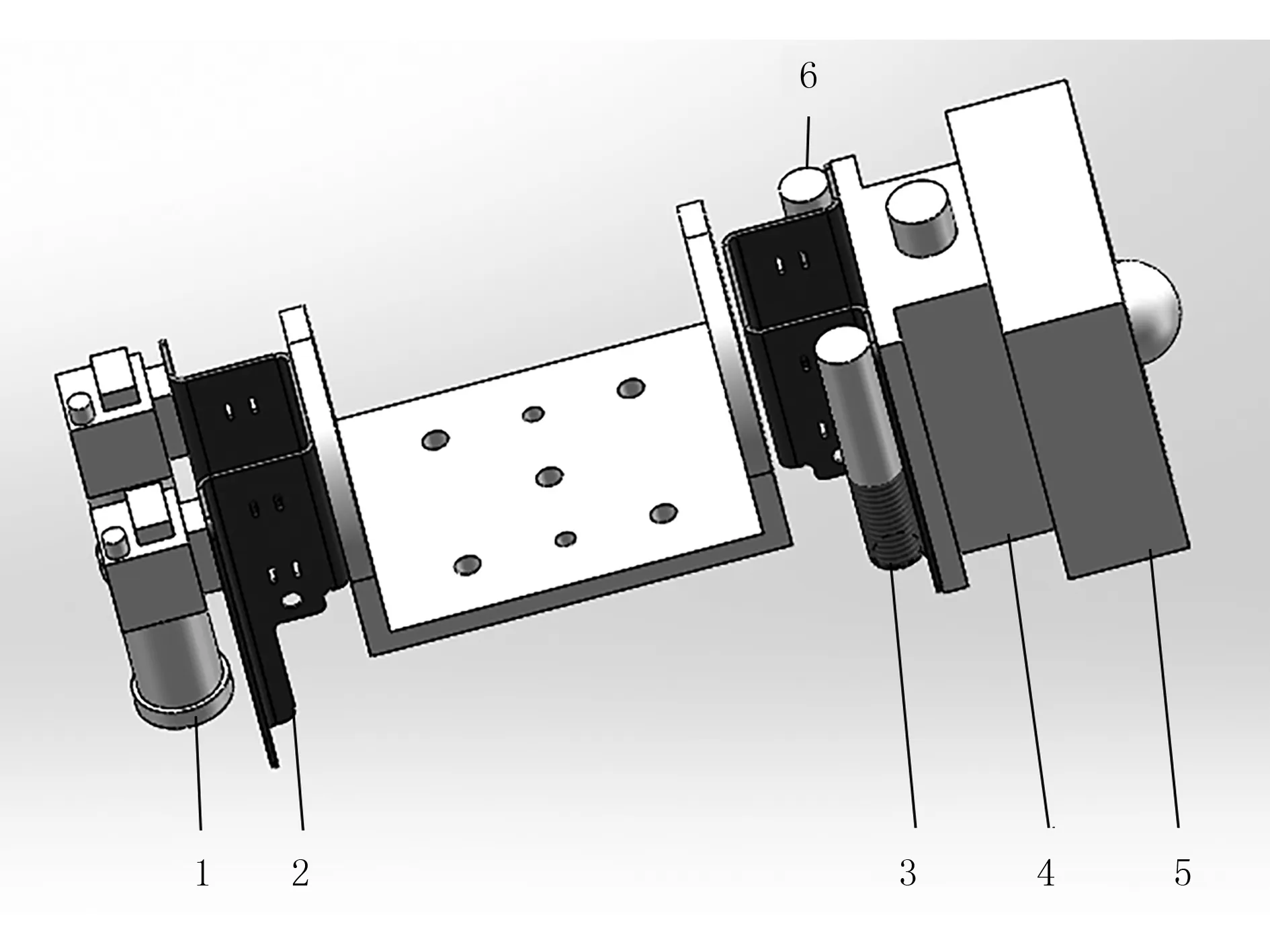
行走機構由齒條、齒輪架、減速電機、齒輪軸、齒輪、軸承及光電編碼器組成,如圖3所示。減速電機與齒輪軸通過軸上的花鍵相連;軸承通過螺栓螺母與支架連接;光電編碼器通過軸上的頂絲與齒輪軸相連,以實現行走距離和位置的計算和檢測。
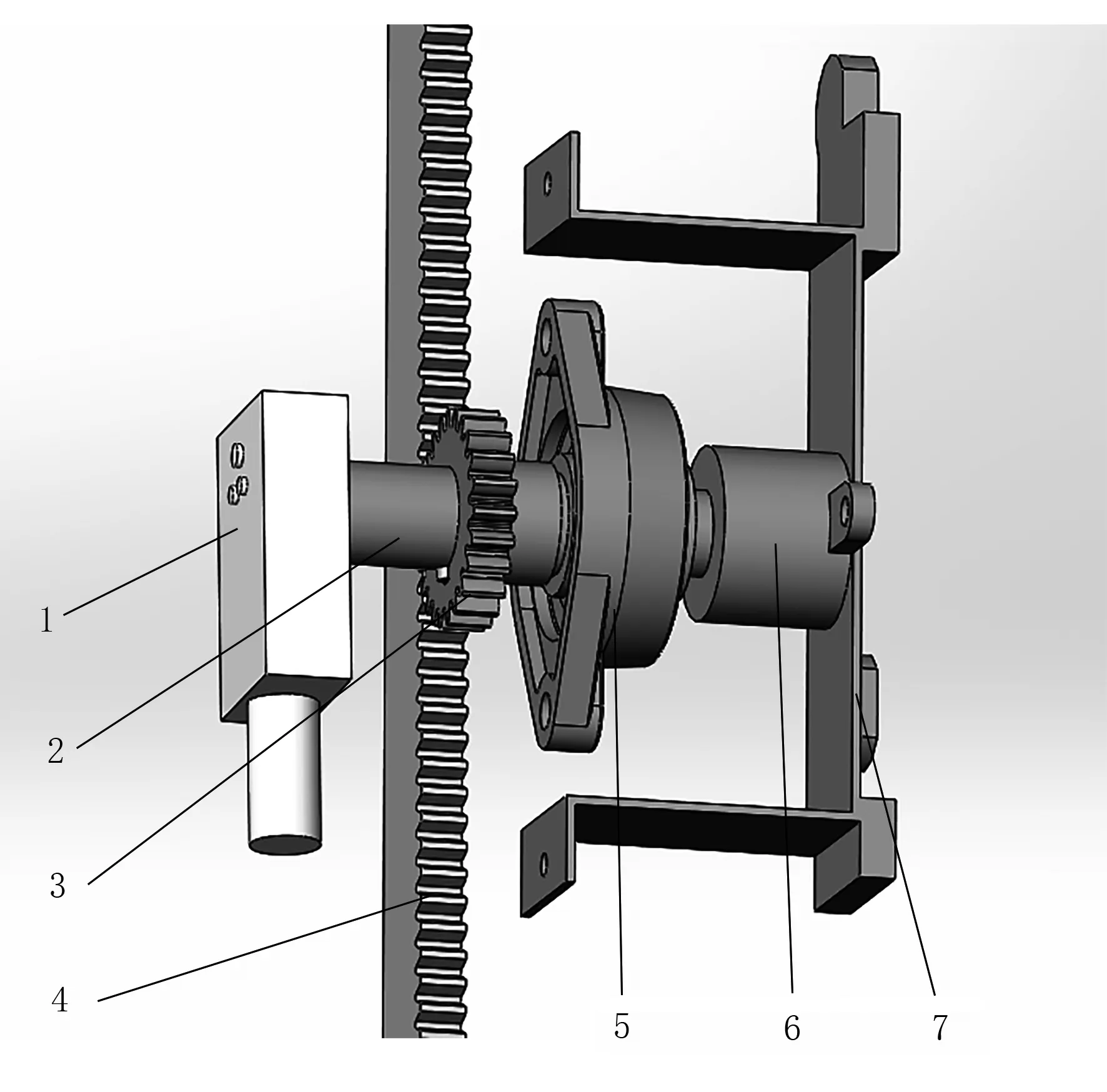
1.減速電機 2.齒輪軸 3.齒輪 4.齒條 5.軸承 6.光電編碼器 7.支架圖3 行走機構三維圖Fig.3 Walking mechanism 3d drawing
電機主要是由功率和轉速兩個標準來選取[6],所選電動機的容量應大于工作要求容量,即額定功率略大于工作機所需功率,即
Ped≥Pd
(1)
式中Ped—額定功率(kW);
Pd—工作機所需功率(kW)。
Pd的計算公式為
(2)
式中Pw—工作時所需功率(kW);
η—傳動各部分傳動效率的連乘積。
由于整套裝置是通過滑輪在滑軌上滑動所受的阻力只有滾動摩擦力f(N),所以工作機所需的牽引力F(N)等于為裝置移動時受到的滾動摩擦力f(N),即
F=f=μ·N=μ·mg
(3)
整套裝置的質量m=40kg,查閱機械設計手冊摩擦因數μ≈0.007,則牽引力F=2.8N,預想懸軌裝置的行走速度v=0.5m/s,計算得工作時所需功率為Pw=0.001 4kW,有
η=η1·η2·η3
(4)
式中η—傳動各部分傳動效率的連乘積;
η1—蝸輪蝸桿減速器的傳動效率;
η2—帶座軸承的傳動效率;
η3—直齒輪的傳動效率。
查閱機械設計手冊,η1≈0.4,η2≈0.98,η3≈0.97,則η=0.380 24,根據式(4)和式(2)計算得到Pd=3.68W[7]。
工作機軸轉速nw(r/min)為
(5)
式中v—裝置的行走速度(m/s);
d—直齒輪的直徑(mm)。
d=mz
(6)
式中m—直齒輪的模數(mm),設計m=1.5;
z—齒數,z=33。
計算得nw=193r/min。由于動力傳遞路線為電動機→蝸輪蝸桿減速器→軸→軸套→齒輪→齒條,則有
nd=nw·i
(7)
式中nd—電動機轉速(r/min);
i—總傳動比。
i=i1·i2
(8)
式中i1—蝸輪蝸桿減速器的傳動比,查表為10~40;
i2—直齒輪的傳動比,查表為2~5;
i—總傳動比,計算得20~200。
帶入式(8)得電動機轉速nd為3 860~38 600rad/min。最終確定的電機為香港奧隆科技有限公司生產的ASLONG A5855型直流減速電機,電機的最大扭矩為6.8kg·cm。
2.3 升降剪叉的設計
滑動平臺由4組滑輪、終端限位開關、懸架、剪叉機構、電控旋轉云臺、云臺電源和DSP運動控制器組成。升降剪叉實現滑動平臺的升降操作,以便于多傳感器系統進行最佳高度檢測位的上下調整[8-9]。
2.3.1 剪叉機構總體受力分析
設計剪叉機構的上下端平臺尺寸為440mm×440mm×150mm,剪叉臂的長度為400mm,剪叉臂與水平的最大允許角度為45°[10]。軌道梁總成與土槽的高度為2.8m,而溫室大型作物番茄植株株高一般為1.5m,每一層剪叉升降的最大高度為400mm,要使機構能夠下降到足夠的高度采集數據,至少需要3層剪叉臂。在此結構基礎上,對機構進行受力分析,以確定其結構參數。圖4(a)為剪叉機構未工作狀態,圖4(b)為剪叉機構最大作業尺寸狀態。
圖5是3層剪叉機構的總體受力圖。其中,對下端的拉力可以視為對上端的壓力,從總體結構受力分析可得支點G、H的受力為
(9)
式中FGy—G點y方向力(N);
FHy—H點y方向力(N);
W—載荷(N)。
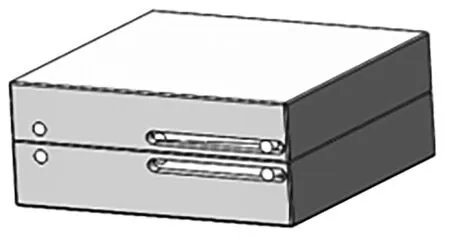
(a)
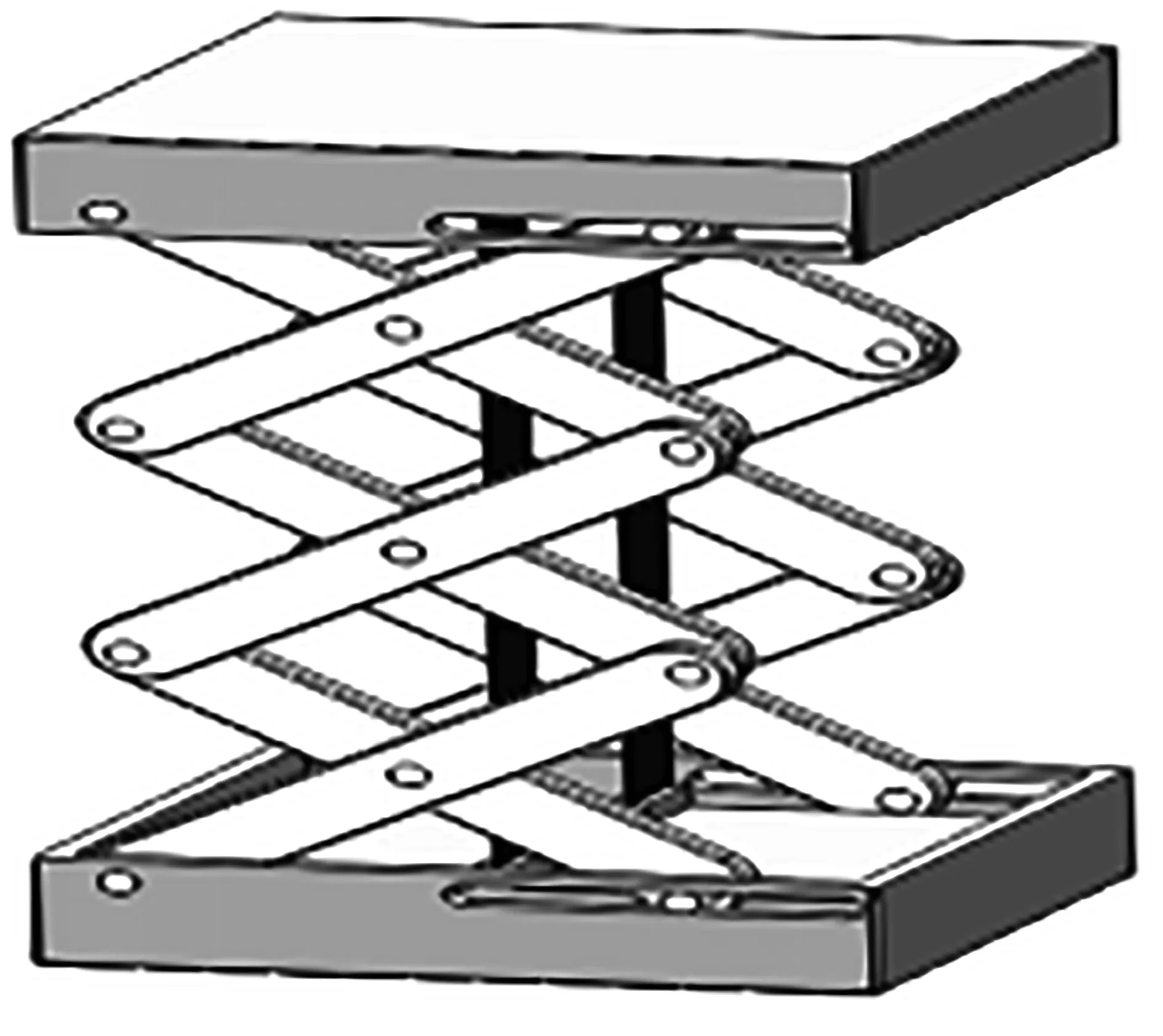
(b)圖4 剪叉作業狀態Fig.4 Working condition of the cutting fork
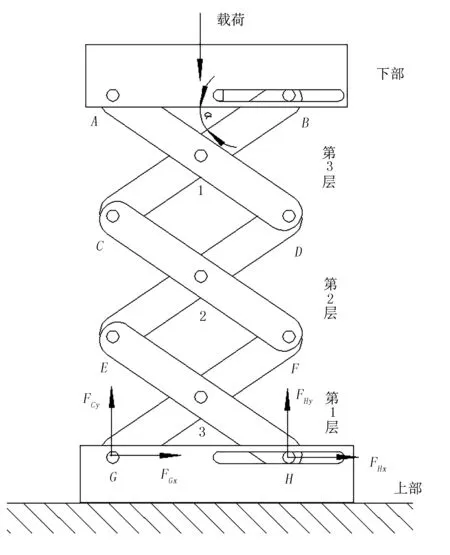
圖5 剪叉總體受力圖Fig.5 Force diagram of the cutting fork
2.3.2 第3層剪叉臂受力分析
剪叉臂機構第3層剪叉臂的總體受力情況如圖6所示。
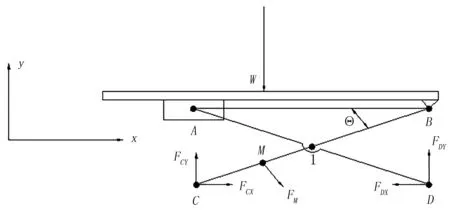
(a) 機構第3層總體受力情況
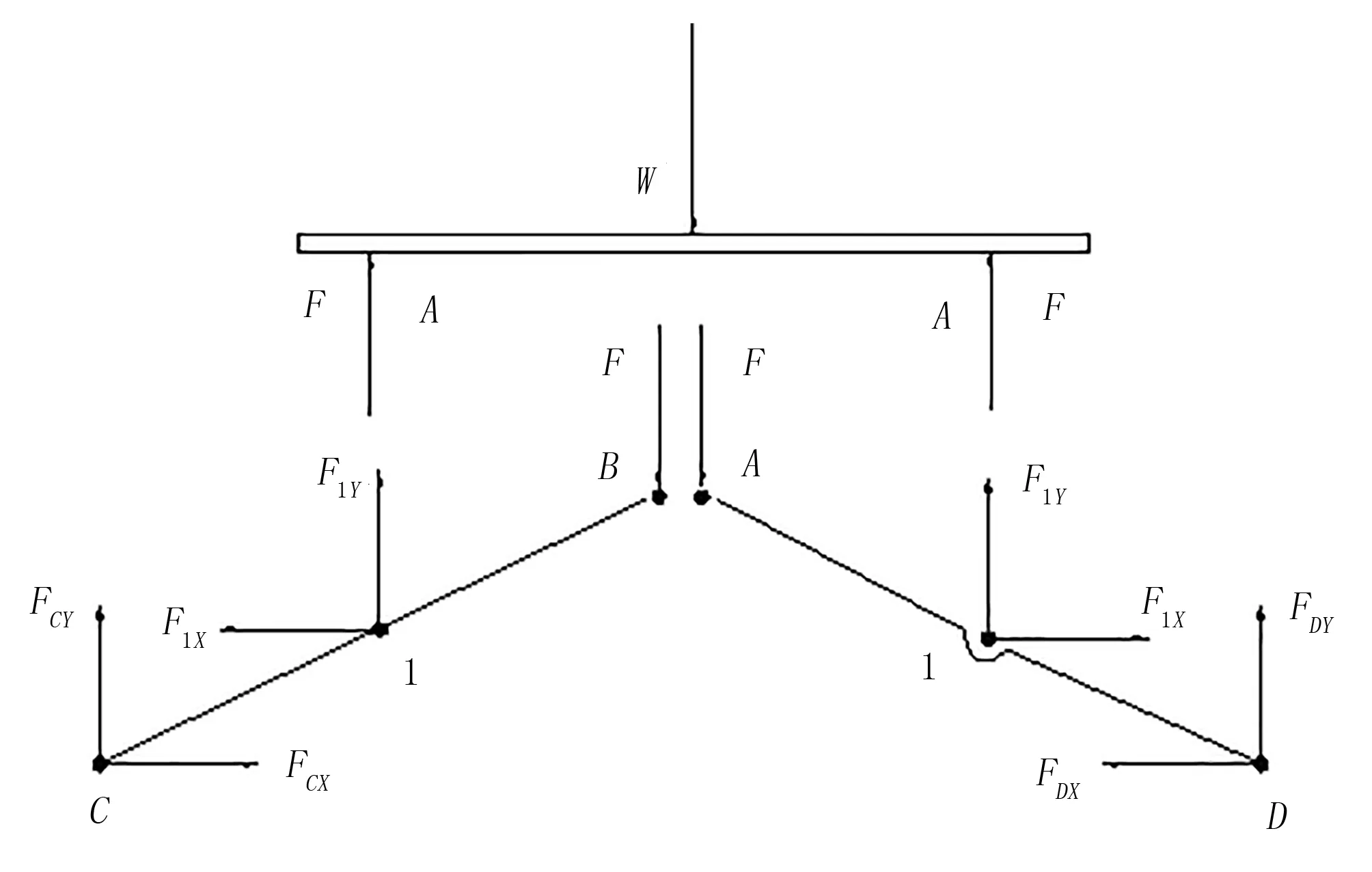
(b) 機構第3層結構工作平臺、AD及BC桿受力分析圖6 剪叉機構第3層總體受力分析Fig.6 Force diagram of the third lay of the cutting fork
由圖6可知:工作平臺上承受的載荷將轉化至A、B鉸點處。第3層剪叉臂中工作平臺、BC桿及AD的受力狀態如圖6(b)所示。根據力的平衡原理可得
(10)
FCx=FDx=FGx
(11)
FGy=0
(12)
其中,FCy為C點y方向力(N);FCx為C點x方向力(N);FDy為D點y方向力(N);FDx為D點x方向力(N);FGx為G點x方向力(N);F為雙剪叉臂所受力(N)。對C點做力矩平衡分析可得
(13)
FGx=2F·cotα
(14)
其中,L為單幅單層剪叉臂的長度(mm);α為剪叉臂與升降級平臺的極限夾角(°)。由于機構所承受的最大拉力為15kg。根據實際情況、工作臺和剪叉臂自重及基于安全考慮,在本設計中最大載荷為30kg,即W=300N,并考慮一副剪叉臂支撐所有重量的情況,即F=W/2=150N,同時借助三維軟件SolidWorks2017仿真機構的極限狀態,測得剪叉臂與升降級平臺的極限夾角α為6°。基于以上兩個基本參數,根據上面各式可計算獲得第3層剪叉臂桿的受力大小(見圖6),其結果為
FCy=FDy=F=150N
(15)
FCx=FDx=FGx≈2857N
(16)
(17)
其中,FM為第3層剪叉臂桿上M點的所受力(N),帶入式(17)計算得FM的最大值為2 870N。
2.4 傳感器系統的設計
多傳感器系統由光照強度傳感器、激光測距傳感器、紅外測溫傳感器、溫濕度傳感器、傳感器支架,以及雙目多功能成像系統組成。通過這些傳感器能直接得到溫室的光照強度、溫濕度等環境綜合信息。
多功能成像系統包括可見光多功能成像系統和近紅外多功能成像系統。其中,可見光成像系統前端裝有前置可見光濾光片和近紅外濾光片組可實現作物營養水分脅迫的特征圖像信息的采集。特征圖像經過處理可以得到作物營養水分信息。
另一方面,多功能成像系統作為復用相機,可以拍攝作物的長勢和病蟲害圖像。經過圖像處理,并結合激光測距傳感器可以得到作物的長勢和病蟲害信息。傳感器系統結構如圖7所示。
1.多功能成像系統 2.傳感器支架 3.溫濕度傳感器 4.激光測距傳感器 5.光照強度傳感器 6.紅外測溫傳感器圖7 傳感器系統三維圖Fig.7 Sensor system 3d map
3 驗證實驗與結果
3.1 直線位移精度實驗
檢測裝置的預想工作過程:裝置接收信號移動并停止在土槽中作物的正上方,然后進行圖像采集。如果直線位移誤差過大,裝置沒有精確地停在預定的位置會導致相機拍攝時的視野無法采集完整的作物圖像,進而無法處理信息準確獲得作物的長勢信息。因此,進行裝置的位移精度實驗是很有必要的。
3.1.1 實驗過程
首先于培養土槽內的1、2、3、4、5m處(以軌道梁一端為零點位置)分別放置甜椒作物用于實驗,以作物栽培盆的幾何中心和旋轉云臺的中心為實驗誤差測量基準點。
將裝置設置為零點位置,打開檢測裝置軟件之后,通過觸摸顯示屏在吊柜位置一欄輸入計劃測量的幾個點位置,并更新位置。指令從工控機通過數據線發送給DSP模塊,控制電機轉動帶動齒輪轉動,與齒條嚙合,帶動懸軌平臺移動到達5個預計點處,以相同恒定的平臺運動速度分別測量在5個點位置的誤差,共進行5次。實驗過程如圖8所示。以旋轉云臺的中心所在豎直線為測量基準線,利用激光測距儀測量與栽培盆幾何中心的豎直方向距離差距。

圖8 移動精度實驗Fig.8 Mobile precision experiment
3.1.2 實驗數據及分析
將5個點位置5次的平均測量誤差列出,如表1所示。
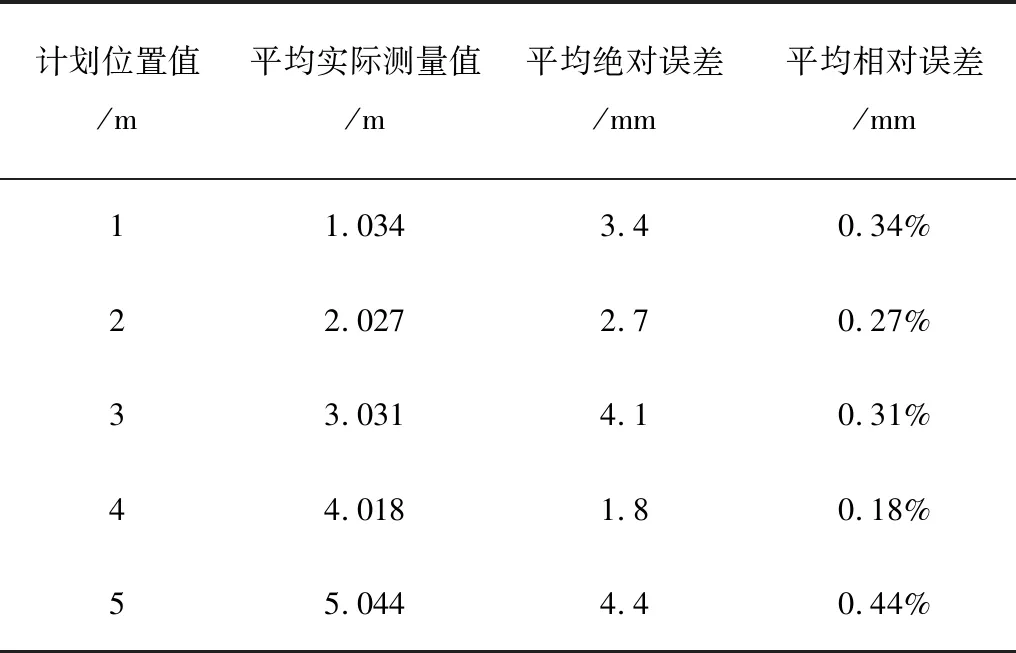
表1 移動精度誤差表Table 1 Movement accuracy error
從表1可以看出:測量的實際測量位置值與計劃位置的值絕對誤差值最大為4.4mm,相對誤差為0.34%。分析數據結果,考慮到測量時定位存在著一些誤差,以及滑輪軌道間存在著摩擦阻力的影響,相比于當初設計時要求的誤差小于5%,可以認為裝置的移動精度較高,誤差較小,不會影響圖像數據的采集。
3.2 空間定位精度實驗
3.2.1 實驗過程
在懸軌平臺到達作物上方后進行空間定位精度實驗。選擇升降剪叉下端平整面與地面的高度為測量值,測得升降剪叉在未工作下降時,下端平整面與土槽的高度為1 410mm,在觸摸顯示屏上的高度一欄,選擇下降5個計劃的高度,用1 410減去計劃降下的高度即可得到平臺下端理論高度值,實驗過程如圖9所示。同時,測得平臺下降后與地面的實際高度,每個高度測量5次,實驗誤差如表2所示。
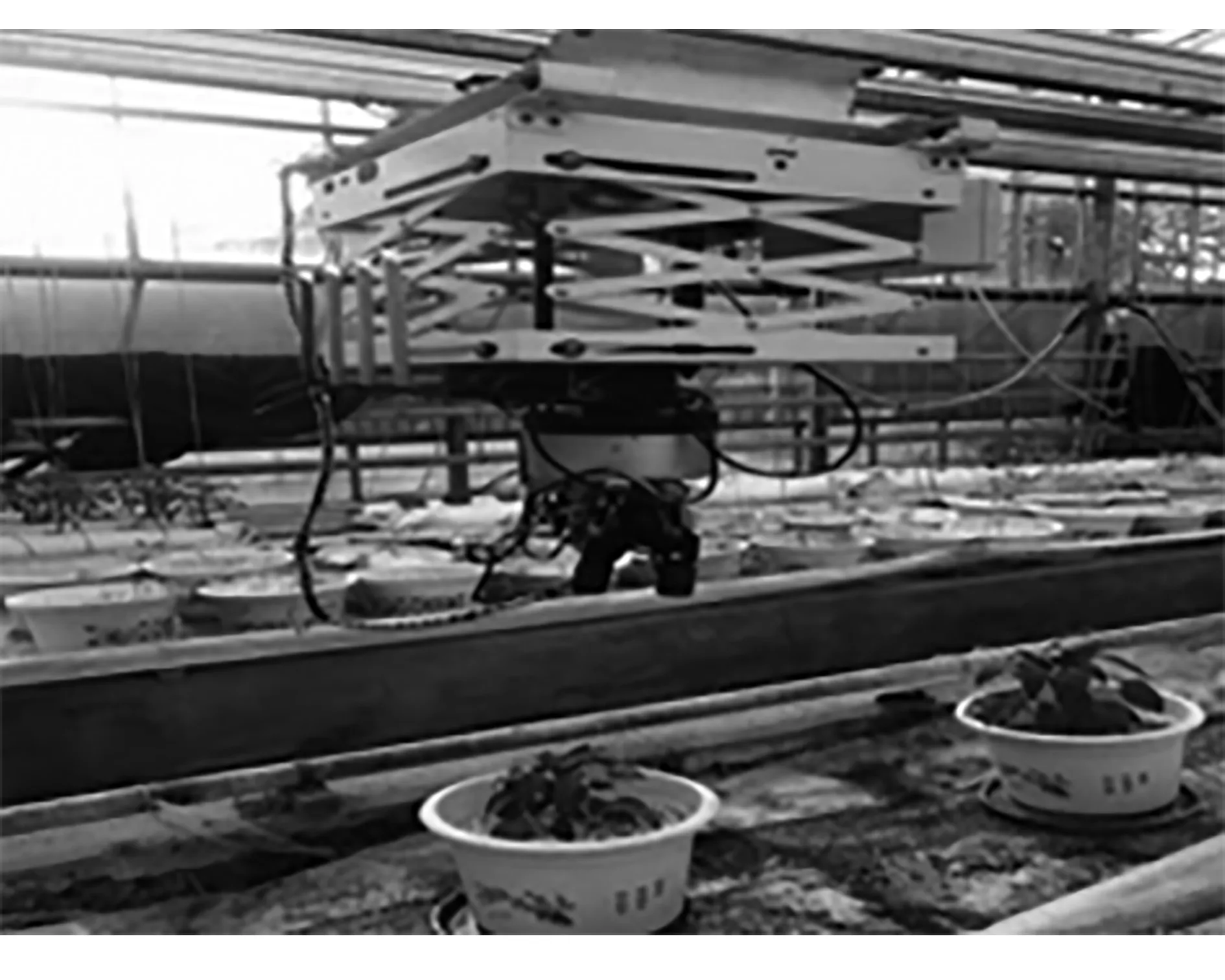
圖9 空間定位精度實驗Fig.9 Space orientation precision experiment表2 空間定位精度誤差表Table 2 Space orientation accuracy error mm
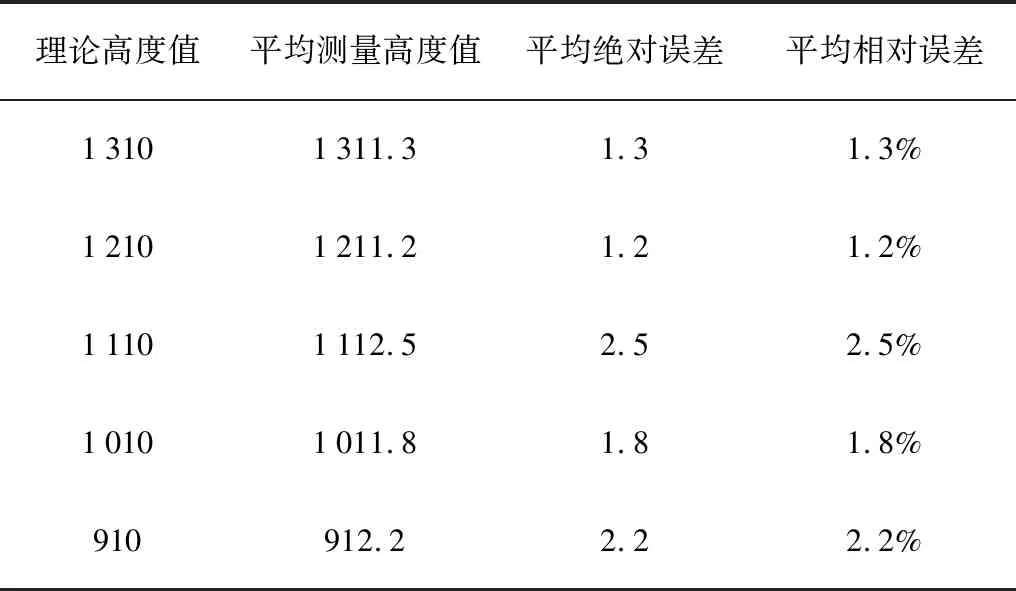
3.2.2 實驗數據及分析
從表2可以看出:5個高度位置5次測量的平均實際測量位置值與計劃位置的值絕對誤差值最大為2.5mm,相對誤差為2.5%。分析數據結果,考慮到測量存在著一些誤差,以及升降臂間存在著摩擦阻力的影響,相比于當初設計時要求的誤差小于5%,可以認為裝置的移動精度較高,誤差較小。
4 結論
結合理論分析并綜合考慮溫室和作物的實際情況,設計了懸軌式溫室綜合信息自動監測裝置,包括軌道梁總成、行走機構、滑動平臺、多傳感器系統、控制柜總成等部分。通過實驗驗證了裝置的直線位移和空間定位精度,實驗結果表明:該平臺運動誤差小,精度較高,能達到精確地采集溫室和作物的生長信息的目標。