基于改進型純追蹤模型的溫室AGV運輸平臺路徑追蹤
2019-05-27 08:56:20夏坡坡姚立健楊自棟張瑞峰趙辰彥
農機化研究 2019年11期
夏坡坡,姚立健,楊自棟,張瑞峰,趙辰彥
(浙江農林大學 工程學院,杭州 311300)
0 引言
自動引導車(Automated guided vehicle,AGV)是一種利用電磁或光學引導裝置,能夠按照預定的引導路徑完成指定運輸作業智能車輛[1-3]。隨著智能技術在各個領域的相互滲透,AGV技術正從工業領域逐步向農業自動化生產領域拓展[4]。位姿獲取和路徑追蹤一直是AGV研究的重點和熱點,AGV的定位精度是高質量路徑追蹤的前提。因為設施內很難接受高分辨率的GPS信號,因此許多學者選擇用無線傳感[5]、機器視覺[6-7]和紅外線[8]等來獲取移動車輛的位置信息。在導航控制系統研究方面,鄭炳坤等[9]采用模糊自整定 PD 調節器來保證磁導航的控制精度和適應性。Amit[10]等人提出動態系統全局漸進穩定定理,設計滑模控制器,實現了AGV的軌跡追蹤。Pratama[11]等人對多個定位傳感器進行數據融合,使用反向步法對預定軌道進行追蹤。在路徑追蹤策略上,純追蹤算法[12]因其簡單易用而在路徑追蹤控制領域獲得廣泛應用,其前視距離的整定對路徑追蹤效果影響較大。熊斌[13]等人將運動學模型和純追蹤模型相結合,根據經驗取不同前視距離,設計了一種直線跟蹤導航控制器。李逃昌[14]等人采用模糊自適應控制的方法,在線自適應地確定純追蹤模型中的前視距離。黃沛琛[15]等人采用BP神經網絡動態調節前視距離改進純追蹤算法,提高了路徑追蹤的精度。
農業生產的環境具有非結構性特征,即便是設施農業環境中,其生產對象、農藝流程、設施布置等均存在極大的易變性。因此,無線傳感、機器視覺等技術難以適應此類多變的復雜環境。在設施內的地面鋪設路徑引導線,使用紅外光電傳感器感知路徑信息,可極大提高生產路徑設置的靈活性。為此,采用雙排紅外反射式光電傳感器,精準獲取AGV平臺的位姿信息,并對純追蹤算法進行改進,根據位姿偏差程度動態確定前視距離,提高AGV導航的精度,最終在農業設施內獲得良好的路徑追蹤效果。
1 材料與方法
1.1 試驗平臺硬件
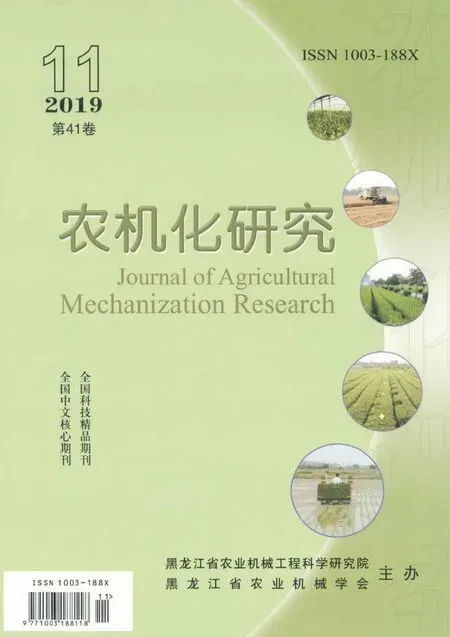
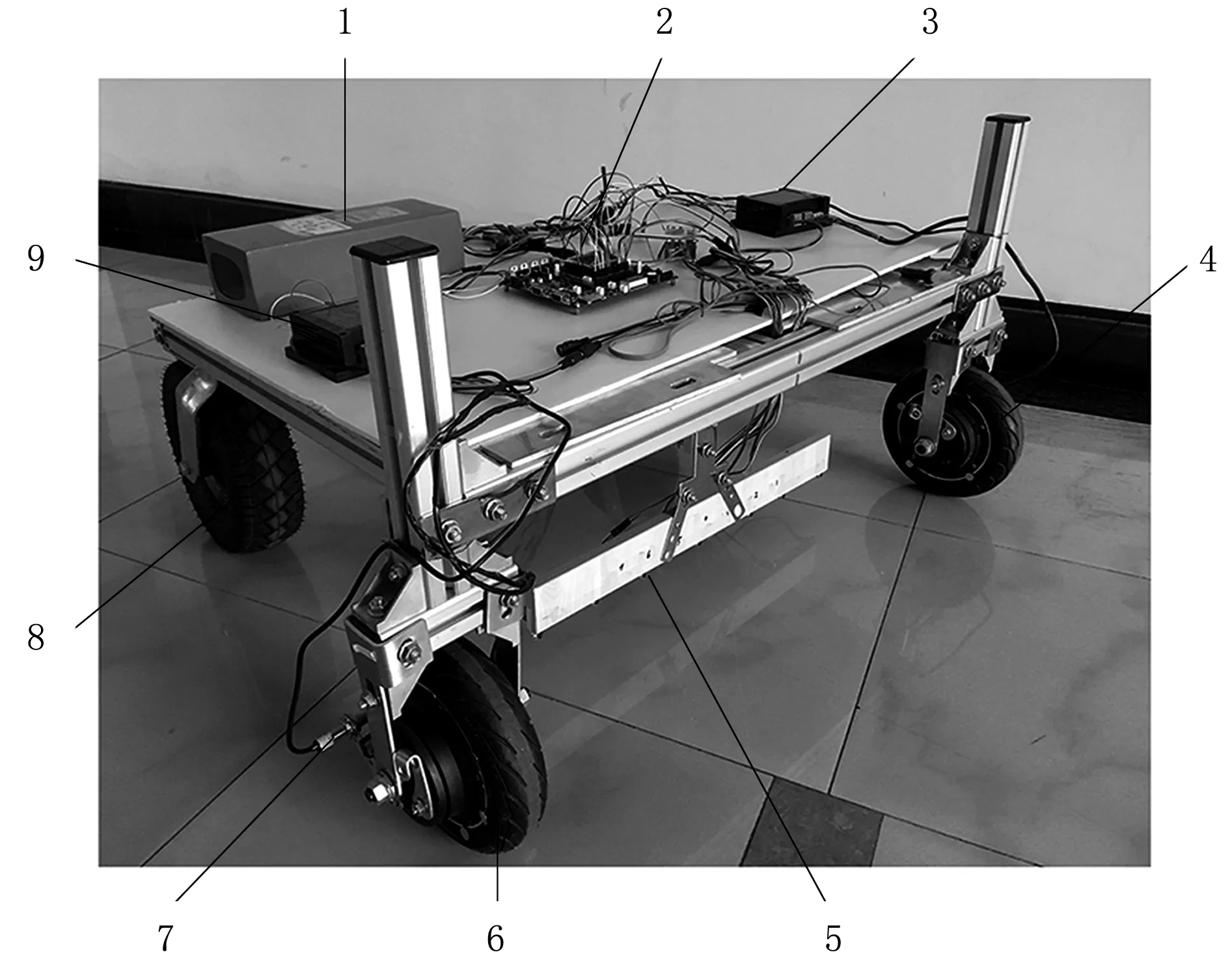
本文AGV試驗平臺采用前輪驅動的四輪機構,長×寬×高為970mm×800mm×500mm,前輪距840mm,軸距570mm,如圖1所示。考慮平臺的輕便性和靈活性需求,前驅動輪由左右兩個6寸輪轂電機組成,后從動輪由2個萬向輪組成。輪轂電機不但是AGV行駛的動力來源,同時又可以通過差速實現轉向。在試驗平臺前后方各安裝一排固定間隔的高精度紅外光電傳感器,型號為E18-D80NK,離地高度30~800mm可調。通過多路紅外光電傳感器組合使用,能獲得平臺與引導線之間的相對位置和姿態信息。選用NJK-5002C型霍爾傳感器對兩驅動輪轉速進行實時采樣。控制器采用主頻為40MHz飛思卡爾MC9S12XS128MAL芯片。根據純追蹤算法計算平臺的轉向半徑,并通過平臺的運動學模型,將轉向半徑轉化為驅動輪的差速,從而實現路徑追蹤。控制器、驅動器、直流無刷輪轂電機和霍爾速度傳感器組成閉環控制系統,實現對左右輪速的精準控制。控制系統原理如圖2所示。
1.鋰電池 2.單片機 3.驅動器左 4.驅動輪左 5.紅外傳感器 6.驅動輪右 7.霍爾傳感器 8.萬向輪 9.驅動器右圖1 AGV自動導航控制實驗平臺Fig.1 Experiment platform of AGV automatic navigation control
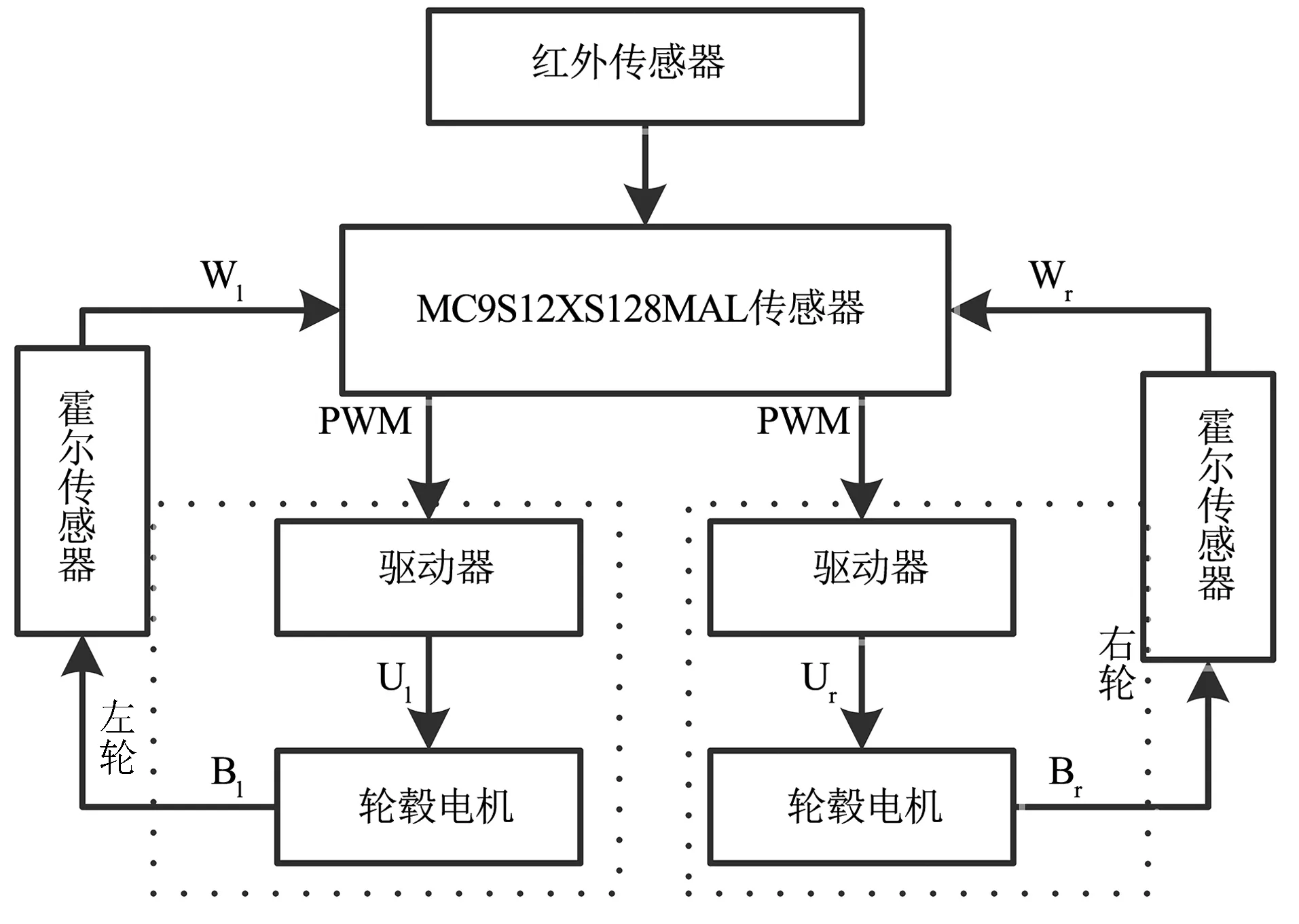
圖2 控制系統原理圖Fig. 2 Schematic diagram of control system
1.2 車體偏差計算方法
在導航過程中,需要實時掌握車體位姿信息,即車體相對于期望路徑(引導線)的偏差,如圖3所示。將偏差數據輸入控制器,通過控制策略得到最佳的差速。車體偏差包括橫向偏差d和航向偏差α。試驗平臺前后方各安裝7路紅外光電傳感器,相鄰傳感器間距e為100mm,離地高度為50mm。當車體前排Fl2傳感器感應到車前方距離引導線的偏差為2e,后排Rr1傳感器感應到車前方距離引導線的偏差為1e,則在此狀態下,平臺相對于導引線的航向偏差α和橫向偏差d可由如下公式計算,即
(1)
d=2e·cosα
(2)
其中,H為前后排傳感器的安裝距離,本文為400mm。

圖3 路徑偏差圖Fig.3 Path tracking deviation diagram graph
根據式(1)、式(2),可計算出平臺相對于引導線可能存在的所有位姿信息,如表1所示。
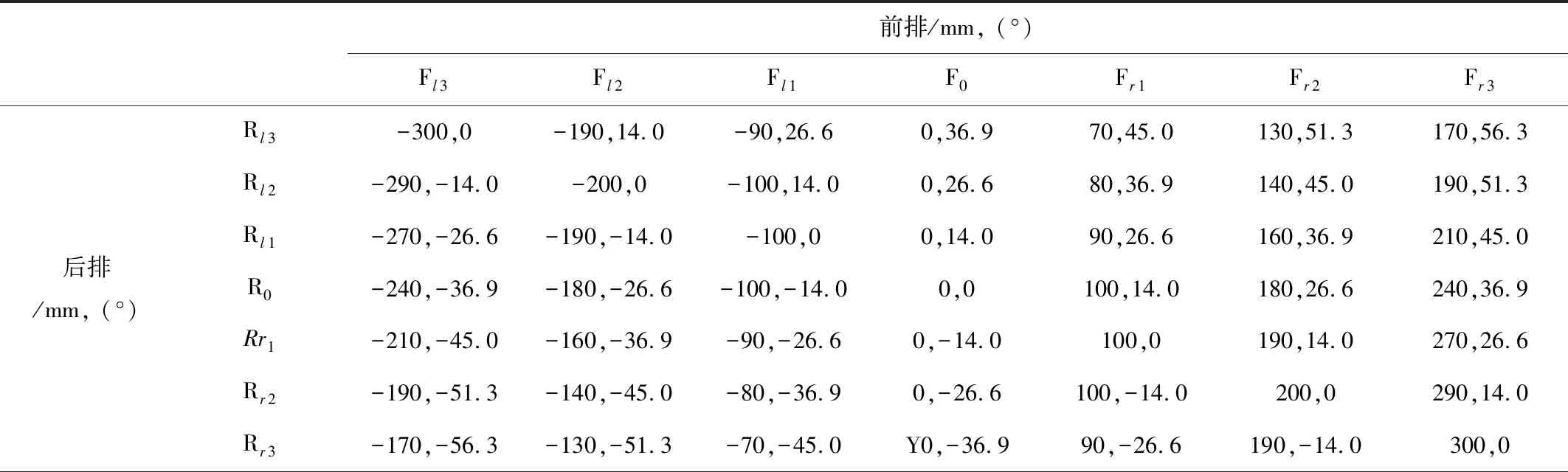
表1 試驗平臺位姿偏差全表Table 1 completeTable of position and posture deviation of test platform
因為前后排的傳感器數各為7個,因此共可得到小車49種姿態。
1.3 改進純追蹤算法
純追蹤算法[12,16]是一種直觀、簡單的純幾何算法,通過合適的前視距離(Look ahead distance, LD)確定車體到引導線上的目標點所經過的圓弧線,進行計算的過程中不需考慮車輛的動力學模型,如圖4所示。以試驗平臺前進的方向為X軸,以前輪車軸方向為Y軸構建車體坐標系OXY,點L為前視目標點,即預瞄點。L點到O點之間的距離即為前視距離LD,橫向偏差d和航向偏差α如圖4所示。本文設計的試驗平臺主要行駛在設施溫室等硬質路面,不考慮輪胎與地面的側向滑動,故采用Kelly等[17]提出的簡化二輪車模型,將輪胎看成剛性輪。根據純追蹤的思想,平臺將從O點出發,沿著圓心為O’、半徑為R的圓弧行駛到達預瞄點為L。則試驗平臺的轉向半徑R為
(3)
其中,(x,y)為期望路徑上的點;R為小車的瞬時轉彎半徑。
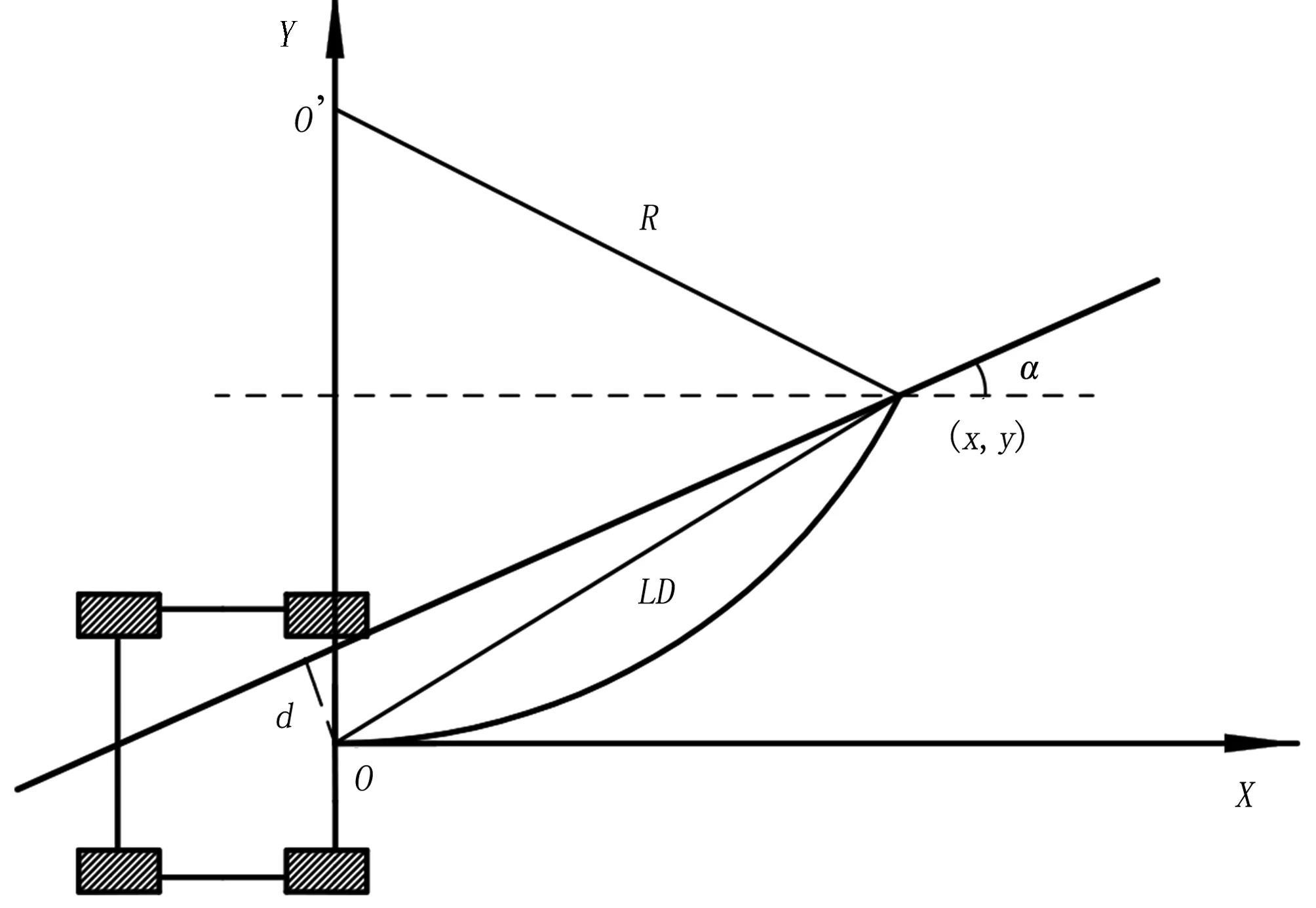
圖4 純追蹤幾何解析示意圖Fig.4 Geometric analysis of pure pursuit model
目前沒有明確的公式確定前視距離,一般根據經驗取車體輪距作為前視距離[18],也可以通過計算機仿真來獲得。前視距離即為駕駛員在駕駛車輛時預設目標點與車體當前位置的距離,根據駕駛員的視覺特點和駕駛習慣,當與期望路線偏差較大時,駕駛員往往以較短的前視距離駕駛,這樣駕駛員會在較短的時間內快速調整車體姿態,使偏差迅速減小;反之,當偏差較小時,駕駛員則會以較大的前視距離駕駛,以減少車體震蕩,提高駕駛的平順性。這里通過MatLab 2010b仿真,尋求在不同偏差狀態下的最佳前視距離LD。由于AGV的橫向和航向偏差為對稱分布,所以此處只選用d和α≥0的偏差狀態進行仿真。
根據表1分別取5組代表性的初始偏差狀態,以控制工程理論中的仿真時間內的平均誤差、最大誤差、穩定距離和調整時間等指標綜合衡量路徑追蹤的質量。穩定距離是指移動平臺從初始狀態第一次收斂到最大偏差的10%所走過的水平距離。調整時間是指從初始狀態行駛到穩定距離所需的時間。穩定偏差是指移動平臺進入穩定狀態后車體與導引線的偏差。仿真環境如表2所示。
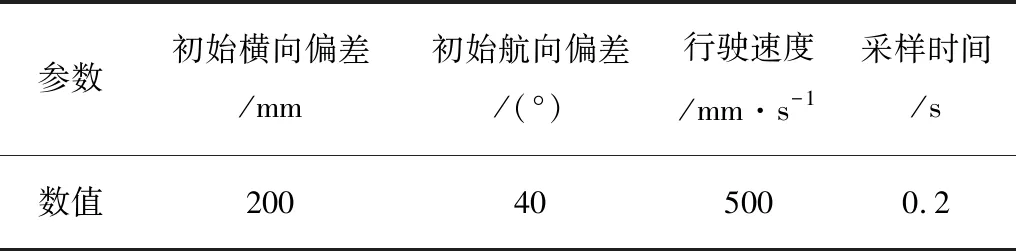
表2 初始狀態及仿真參數Table 2 Initial state and simulation parameters

(4)
圖5、
圖6中列出前視距離恒定不變和動態變化時的仿真結果對比,可以看出:動態LD在規定步數的平均誤差和調整時間略劣于恒值LD,但在穩定距離上有明顯優勢,如表3所示。
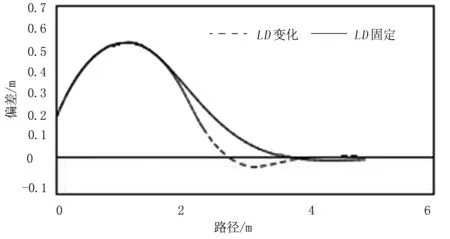
圖5 不同前視距離的路徑跟蹤仿真對比Fig.5 Simulation and comparison of path tracking with different look ahead distance
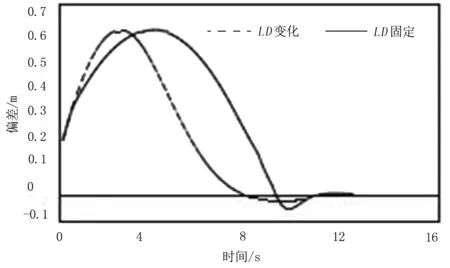
圖6 不同前視距離的偏差與時間仿真對比Fig. 6 Comparison of deviation and time simulation of different look ahead distance表3 仿真結果統計Table 3 Simulation results statistics
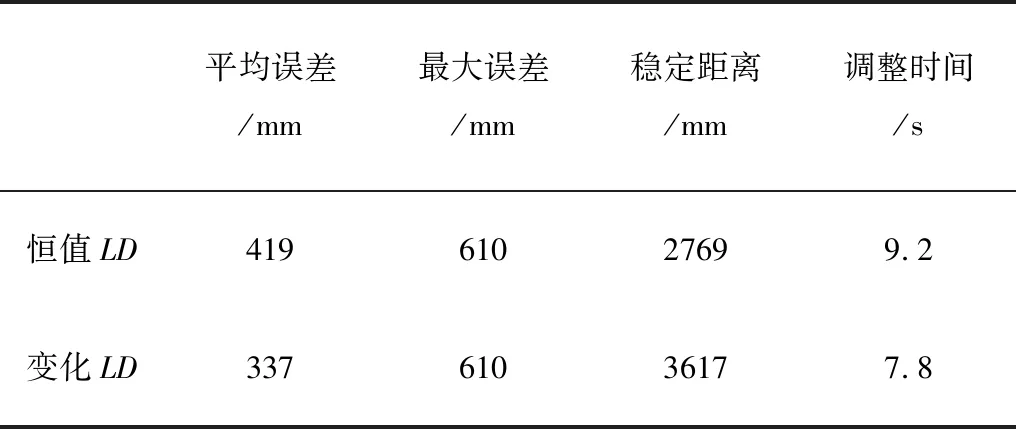
平均誤差/mm最大誤差/mm穩定距離/mm調整時間/s恒值LD41961027699.2變化LD33761036177.8
在溫室狹小的生產環節中,穩定距離越小,說明移動平臺調整位姿所需的空間越小,因此從仿真結果綜合分析來看,動態變化前視距離的綜合路徑追蹤質量要優于恒值前視距離的效果。
1.4 AGV小車運動學模型
純追蹤模型求出的是平臺的轉向半徑R。只有通過建立AGV試驗平臺的運動學模型,搭建試驗平臺位姿信息與左右驅動輪轂電機速度的橋梁,才能將由純追蹤算法得到的轉向半徑R值轉化為左右輪速。試驗平臺的行駛速度V定義為平臺移動時前輪軸中心的線速度,則
(5)
其中,VL和VR分別為輪轂驅動電機的左右輪速。根據車體機械結構尺寸、左右輪速可得平臺的轉向半徑和輪速的關系為
(6)
其中,D為平臺的驅動輪輪距,D=840mm。由式(3)~式(6)可得:左右輪的速度VL、VR與車體位姿d、α及前視距離LD、車體速度V之間的關系為
(7)
(8)
AGV試驗平臺就是通過調整左右輪速VL和VR來修正航向偏差α和橫向偏差d,最終實現平臺的路徑跟蹤目的。
2 試驗與分析
為檢驗上述算法的正確性,設計4種初始狀態來考察上文試驗平臺的偏差收斂效果。平臺前進速度設定為0.5m/s,前視距離按式(4)的方式動態調整。為更高效地利用單片機資源,編程時采用查表的方式,即由不同的位姿情況檢索相應的驅動輪轉速,通過霍爾傳感器形成閉環實時控制系統,實現對驅動輪轉速的實時調整。
在平鋪于實驗室地面的白紙上粘貼寬為30mm黑色膠帶作為路徑追蹤的引導線,線長為10m。按照類似文獻[13]的方法,試驗中AGV小車驅動輪軸中心點作為小車行駛軌跡的記錄點,在記錄點正下方懸掛一直鉛筆,使用卷尺測量并記錄畫痕到期望路徑線的距離。每種初始狀態做4次試驗,求偏差的平均值,實際跟蹤效果如圖7和表4所示。

圖7 不同初始狀態下AGV路徑追蹤軌跡Fig.7 Path tracking trajectory of AGV under different initial states
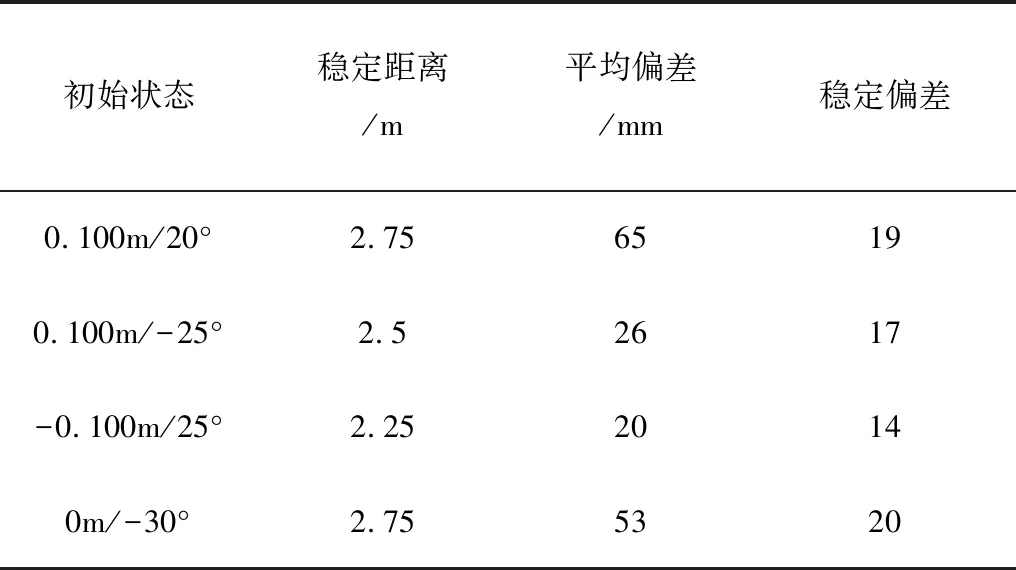
表4 不同初始狀態下AGV路徑追蹤試驗數據統計Table 4 Statistics of AGV path tracking test data under different initial conditions
由圖7和表4可得:
1)只要是在移動平臺位姿偏差可測范圍之內,移動平臺輪轂電機在純追蹤算法的控制下,均能從初始狀態經過差速調整,逐步收斂到引導線,收斂的快慢及平均偏差由初始狀態的偏差程度決定。
2)動態前視距離在偏差較大時視距較短,平臺獲得較小的轉向半徑,可提高平臺的收斂速度,反之,當偏差較小時視距變大,此時平臺的轉向半徑較大,增加了行駛的平順性。
3)當平臺駛過穩定距離后,其偏差在±20mm以內,說明本算法具有很好的路徑追蹤性能。該系統能在無劇烈轉向的前提下以較高的精度循跡,滿足溫室運輸要求。
4)圖7中對稱的初始狀態但呈現不一樣的行駛軌跡,是因為平臺的硬件誤差造成。另外,系統的相應的滯后和差速控制時的輕微側滑也會造成軌跡并不像仿真圖像那么平滑。
3 結論與展望
1)采用雙排紅外線傳感器精準獲取移動平臺的位姿偏差信息,對純追蹤算法進行改進,根據平臺相對于引導線的偏差程度來動態修正前視距離,從而實現精準的路徑追蹤控制。
2)仿真和實車試驗表明:該方法能夠解決一定范圍內不同初始狀態的車體路徑追蹤問題,在穩定狀態下,其偏差在±20mm之間,滿足溫室內狹窄空間的循跡運輸需求。
3)受紅外傳感器尺寸限制,研究平臺的姿態的適應性也受到一定限制,在后續的研究中,可考慮其他位姿獲取方式,使平臺的適應性進一步提高。