基于UG與MatLab馬鈴薯挖掘機(jī)分離篩仿真與優(yōu)化
2019-05-27 08:56:18王春光謝勝仕鄧偉剛
農(nóng)機(jī)化研究 2019年11期
關(guān)鍵詞:方向
李 建,王春光,謝勝仕,鄧偉剛
(內(nèi)蒙古農(nóng)業(yè)大學(xué) 機(jī)電工程學(xué)院,呼和浩特 010018)
0 引言
隨著我國(guó)馬鈴薯主糧化戰(zhàn)略的提出,馬鈴薯的種植面積快速擴(kuò)大,但與快速膨脹的種植規(guī)模不相稱的是我國(guó)馬鈴薯收獲的機(jī)械化程度。近年來(lái),越來(lái)越多的科研單位對(duì)馬鈴薯挖掘機(jī)展開(kāi)研究,但現(xiàn)有的馬鈴薯挖掘機(jī)仍存在著薯土分離效果不佳和馬鈴薯破損率高的缺陷。目前,市場(chǎng)上使用較廣的中小型馬鈴薯挖掘機(jī)主要有升運(yùn)鏈?zhǔn)胶蜕\(yùn)鏈—分離篩式兩種機(jī)型。本文針對(duì)升運(yùn)鏈—分離篩式收獲機(jī)的參數(shù)進(jìn)行研究,明確制約篩分效果的主要因素,并進(jìn)行改進(jìn)。
國(guó)內(nèi)外馬鈴薯薯土分離技術(shù)的研究都是基于本國(guó)的國(guó)情展開(kāi)的。以美、俄(前蘇聯(lián))為代表的國(guó)家使用的多為大型聯(lián)合收獲機(jī),以英、德為代表的國(guó)家對(duì)分離技術(shù)的研究朝向高精尖的方向發(fā)展,對(duì)篩分技術(shù)的研究也融合到收獲機(jī)的整體中,已從最早的物理分離技術(shù)的研究過(guò)渡到了現(xiàn)在的光學(xué)分離技術(shù)的研究。國(guó)內(nèi)各大科研院校對(duì)馬鈴薯收獲機(jī)篩分技術(shù)的研究則是集中在中小型收獲機(jī)。
筆者以內(nèi)蒙古農(nóng)業(yè)大學(xué)機(jī)械廠研制的4SW-170型馬鈴薯挖掘機(jī)作為研究對(duì)象,針對(duì)馬鈴薯挖掘機(jī)薯土分離效果不佳和馬鈴薯破損率高的問(wèn)題,通過(guò)采用理論分析與虛擬技術(shù)融合的方式對(duì)分離篩運(yùn)動(dòng)規(guī)律進(jìn)行研究,旨在為馬鈴薯收獲機(jī)分離篩的優(yōu)化提供依據(jù)。
1 分離篩的功能分析
擺動(dòng)分離篩作為馬鈴薯挖掘機(jī)實(shí)現(xiàn)篩分功能的核心部件,分離篩的結(jié)構(gòu)示意圖如圖1所示。設(shè)篩面傾角為ε,擺動(dòng)方向角為α,擺桿傾角為β。機(jī)構(gòu)的運(yùn)動(dòng)方式為偏心輪裝置簡(jiǎn)化成的曲柄機(jī)構(gòu),通過(guò)旋轉(zhuǎn)提供動(dòng)力,曲柄每轉(zhuǎn)1周分離篩前擺桿的擺動(dòng)18°,由曲柄、前擺桿以及連桿構(gòu)成的曲柄搖桿機(jī)構(gòu)帶動(dòng)整套機(jī)構(gòu)進(jìn)行運(yùn)動(dòng),由前擺桿和后擺桿以及篩架構(gòu)成另一組曲柄搖桿機(jī)構(gòu)帶動(dòng)篩條組合成的篩面沿振動(dòng)方向的往復(fù)擺動(dòng);篩條的擺動(dòng)可以分解為沿垂直方向的振動(dòng)和沿水平方向的平動(dòng),實(shí)現(xiàn)篩分功能。

1.曲柄 2.連桿 3.前擺桿 4.一級(jí)分離篩 5.后擺桿 6.二級(jí)分離篩圖1 馬鈴薯收獲機(jī)分離篩結(jié)構(gòu)示意圖Fig.1 A schematic diagram of the separation and sieve structure of a potato harvester
為了研究馬鈴薯分離篩功能,使用UG NX8.0對(duì)分離篩的核心部件進(jìn)行建模,如圖2所示。建模后在運(yùn)動(dòng)仿真模塊中選擇ADAMS求解器進(jìn)行求解。UG ADAMS求解器由UG的開(kāi)發(fā)公司EDS公司和ADAMS開(kāi)發(fā)公司MSC聯(lián)合研制,目的是進(jìn)行產(chǎn)品的強(qiáng)強(qiáng)聯(lián)合,解決軟件互導(dǎo)帶來(lái)的問(wèn)題。由馬鈴薯在分離篩上的運(yùn)動(dòng)規(guī)律可知,每級(jí)分離篩的末端為分離篩加速度的極值點(diǎn),因此在馬鈴薯收獲機(jī)兩級(jí)分離篩篩條末端取標(biāo)記點(diǎn)A1、A2作為加速度的測(cè)試點(diǎn),獲取分離篩末端垂直方向加速度與水平方向加速度變化,如圖3所示。

圖2 馬鈴薯收獲機(jī)分離篩三維模型圖
Fig.2 Three dimensional model diagram of potato harvester separation screen


圖3 分離篩測(cè)試點(diǎn)加速度圖Fig.3 Test point acceleration map of separation screen
2 分離篩擺桿及篩條運(yùn)動(dòng)規(guī)律分析
馬鈴薯挖掘機(jī)分離篩兼具篩分與輸送功能,通過(guò)試驗(yàn)的探究得知:馬鈴薯?yè)p傷主要由馬鈴薯與分離篩的接觸碰撞及篩分時(shí)馬鈴薯之間相互的碰撞造成的,且馬鈴薯與分離篩的碰撞是損傷的主要原因。經(jīng)試驗(yàn)研究發(fā)現(xiàn):馬鈴薯在分離篩上的碰撞隨著時(shí)間的增加而逐步增強(qiáng),產(chǎn)生這種現(xiàn)象的主要原因是第二級(jí)分離篩振動(dòng)增強(qiáng)和馬鈴薯在無(wú)土篩面上的接觸時(shí)間過(guò)長(zhǎng)。因此,如果能降低第二級(jí)分離篩的振動(dòng),將分離功能向第一級(jí)分離篩集中,并且減少馬鈴薯在分離篩上的接觸時(shí)間,將會(huì)獲得理想的薯土分離效果。根據(jù)分離篩的結(jié)構(gòu)可知,直接影響馬鈴薯挖掘機(jī)第二級(jí)分離篩振動(dòng)和接觸時(shí)間的因素有擺桿的長(zhǎng)度和篩條的長(zhǎng)度,本文將針對(duì)這兩個(gè)因素進(jìn)行研究。
2.1 分離篩擺桿長(zhǎng)度對(duì)第二級(jí)分離篩加速度影響
2.1.1 理論分析
由于為馬鈴薯挖掘機(jī)分離篩提供直接動(dòng)力的部件是懸掛在兩級(jí)分離篩上的4根擺桿,為了研究改變擺桿長(zhǎng)度對(duì)第二級(jí)分離篩的篩分加速度的影響,本文將采用速度瞬心的方法進(jìn)行理論推導(dǎo)。
由于分離篩的后擺桿直接作用于二級(jí)分離篩,因此通過(guò)改變后擺桿的相關(guān)參數(shù)來(lái)改變二級(jí)分離篩垂直方向加速度是本節(jié)研究的目標(biāo)。為了探究其具體規(guī)律,設(shè)計(jì)了加長(zhǎng)擺桿與縮短擺桿兩種方案。
方案一:縮短桿長(zhǎng),將后擺桿縮短為前擺桿長(zhǎng)度的1/2進(jìn)行分析,如圖4所示。

圖4 分離篩前擺桿加長(zhǎng)Fig.4 The lengthening of the front swing bar of the separation screen
設(shè)前擺桿受到的驅(qū)動(dòng)角速度為ω1,前擺桿AB長(zhǎng)度為L(zhǎng),為便于研究將后擺桿CD長(zhǎng)度設(shè)為L(zhǎng)/2,速度順心為O點(diǎn)。根據(jù)以上條件得
ω1·OA=ω3·OC
ω3=ω1·(OA/OC)=2ω1
前擺桿AB和后擺桿CD的向心加速度分別為
anCD/anAB=2
前擺桿AB和后擺桿CD的切向加速度分別為
aτCD/aτAB=1
由上述推論可知:縮短二級(jí)分離篩擺桿長(zhǎng)度,兩級(jí)分離篩水平方向加速度相同,第二級(jí)分離篩垂直方向加速度是第一級(jí)的兩倍。
方案二:加長(zhǎng)擺桿的長(zhǎng)度,其結(jié)構(gòu)如圖5所示。
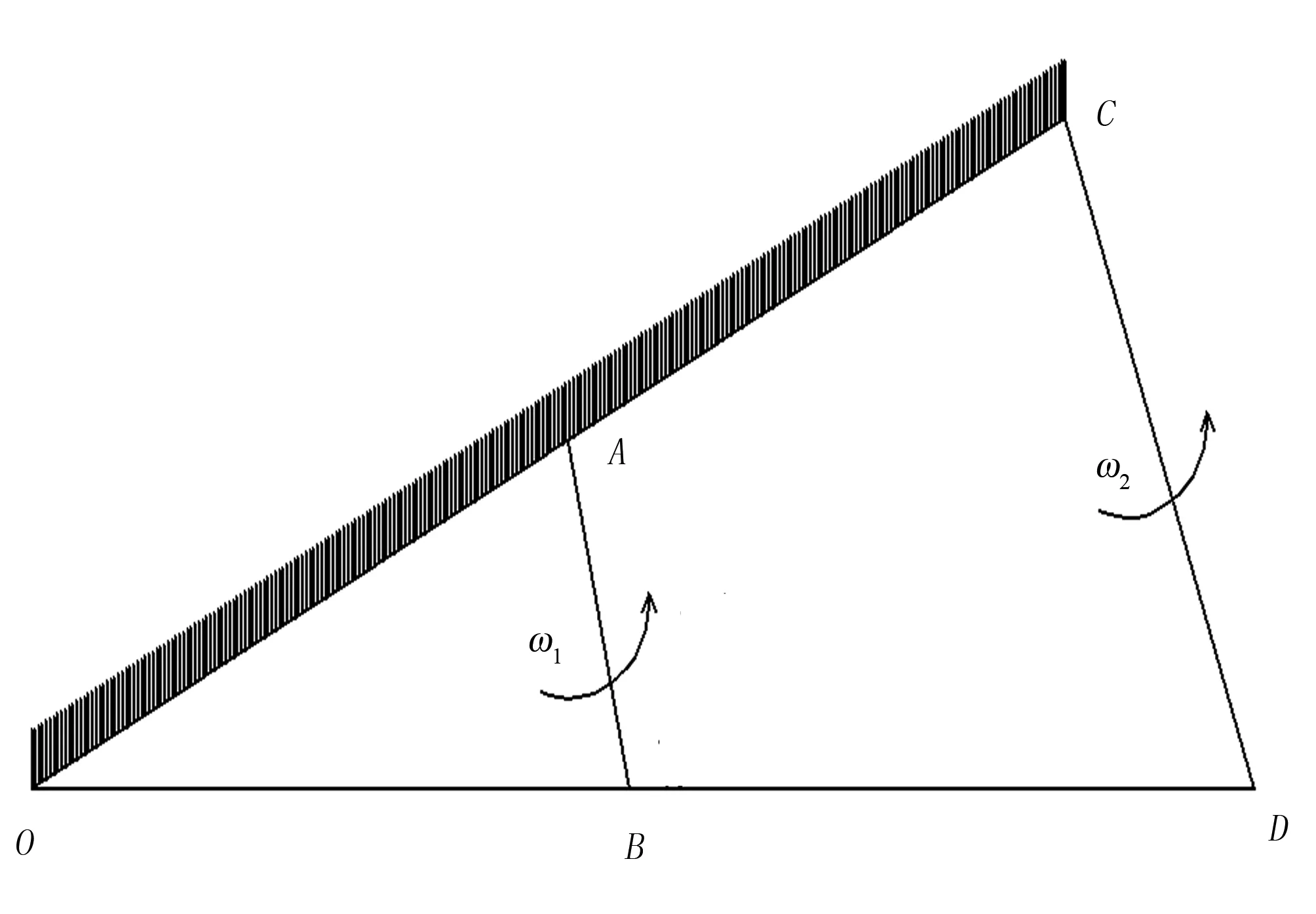
圖5 分離篩后擺桿加長(zhǎng)Fig.5 The lengthening of the rear swing bar of the separation screen
設(shè)前擺桿受到的驅(qū)動(dòng)角速度為ω1,前后桿AB長(zhǎng)度為L(zhǎng),則后擺桿CD長(zhǎng)度為2L,速度順心為O點(diǎn)。根據(jù)結(jié)構(gòu)可得
ω1·OA=ω3·OC
前擺桿AB和后擺桿CD的向心加速度分別為
前擺桿AB和后擺桿CD的切向加速度分別為
aτCD/aτAB=1
根據(jù)以上推論得:二級(jí)分離篩垂直方向加速度是第一級(jí)向心分離加速度1/2,通過(guò)對(duì)兩個(gè)方案的比較,方案二符合第二級(jí)分離篩垂直方向加速度低于第一級(jí)的設(shè)想。
2.1.2 分離規(guī)律
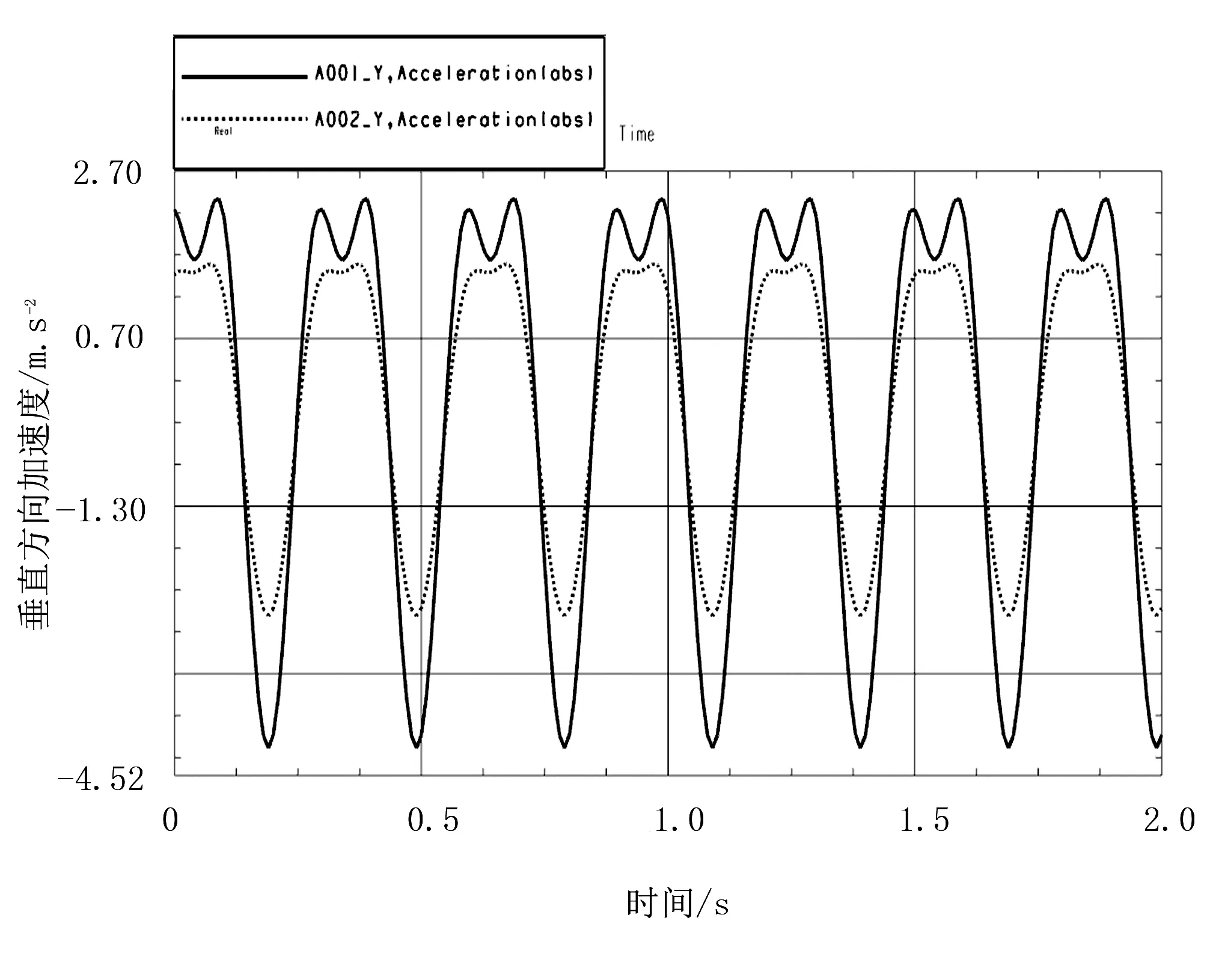
前文通過(guò)理論分析對(duì)分離篩影響做出分析,提出縮短收獲機(jī)分離篩篩條長(zhǎng)度將使得馬鈴薯減少在篩條上的碰撞,但縮短篩條的長(zhǎng)度將使得分離篩分離加速度增大。為了尋求最佳的分離結(jié)果,本節(jié)將對(duì)具體的分離規(guī)律進(jìn)行探索。從前文可知:通過(guò)加長(zhǎng)分離篩擺桿的長(zhǎng)度將減少分離篩垂直方向的加速度,因此現(xiàn)將擺桿的長(zhǎng)度加長(zhǎng)至350、400、450mm,兩級(jí)分離篩篩條末端取標(biāo)記點(diǎn)A1、A2作為加速度的測(cè)試點(diǎn),其仿真效果如圖6所示。
為獲取擺桿長(zhǎng)度與垂直方向加速度的具體函數(shù)關(guān)系,對(duì)圖6所示兩點(diǎn)A001與A002的垂直方向加速度的極值點(diǎn)進(jìn)行標(biāo)記,獲取極值點(diǎn)的數(shù)據(jù)如表1所示。
(a) 350mm

(b) 400mm

(c) 450mm圖6 擺桿長(zhǎng)度對(duì)垂直方向加速度影響Fig.6 Influence of pendulum length on vertical acceleration表1 擺桿長(zhǎng)度改變后垂直方向加速度Table 1 Vertical direction acceleration after changing the length of the pendulum

XL/mmYA/m·s-2X0350Y02.606X1400Y12.051X2450Y21.618
利用拉格朗日插值多項(xiàng)式將獲得插值參數(shù)帶入得擺桿—加速度函數(shù),可獲得分離函數(shù)為
按照相同的方法可以求得擺桿長(zhǎng)與水平方向加速度的關(guān)系為
2.2 分離篩篩條長(zhǎng)度對(duì)第二級(jí)分離篩加速度影響
2.2.1 理論分析
為了解決馬鈴薯在分離篩無(wú)土覆蓋區(qū)接觸時(shí)間過(guò)長(zhǎng)的問(wèn)題,將二級(jí)分離篩的篩條長(zhǎng)度縮短(見(jiàn)圖7),并通過(guò)理論分析對(duì)縮短后的分離性能做出分析。
由圖7可知:分離篩篩條上的各點(diǎn)在垂直方向的運(yùn)動(dòng)可以視為各點(diǎn)繞與擺桿AB平行處擺動(dòng),當(dāng)篩條的長(zhǎng)度由D處縮短至C處時(shí),其旋轉(zhuǎn)半徑縮短。由轉(zhuǎn)動(dòng)剛體加速度公式an=v2/R可知同一篩條上各點(diǎn)速度相同,當(dāng)半徑減小時(shí),篩條垂直方向加速度增大。

圖7 第二級(jí)分離篩機(jī)構(gòu)簡(jiǎn)圖Fig.7 Simple diagram of second stage separation sieve mechanism
2.2.2 分離規(guī)律
為了探究篩條長(zhǎng)度對(duì)垂直方向加速度的影響,將擺桿長(zhǎng)作為定量,改變篩條的長(zhǎng)度分析其對(duì)分離加速度的影響,并仍采用插值的方式來(lái)求取函數(shù),但與擺桿同時(shí)影響前后兩級(jí)篩子不同的是改變篩條的長(zhǎng)度將只對(duì)二級(jí)分離篩產(chǎn)生影響。將篩條的長(zhǎng)度分別縮短至距二級(jí)分離篩起始處100、200、300mm,兩級(jí)分離篩篩條末端取標(biāo)記點(diǎn)A1、A2作為加速度的測(cè)試點(diǎn),其仿真效果如圖8所示。

(a) 100mm

(b) 200m
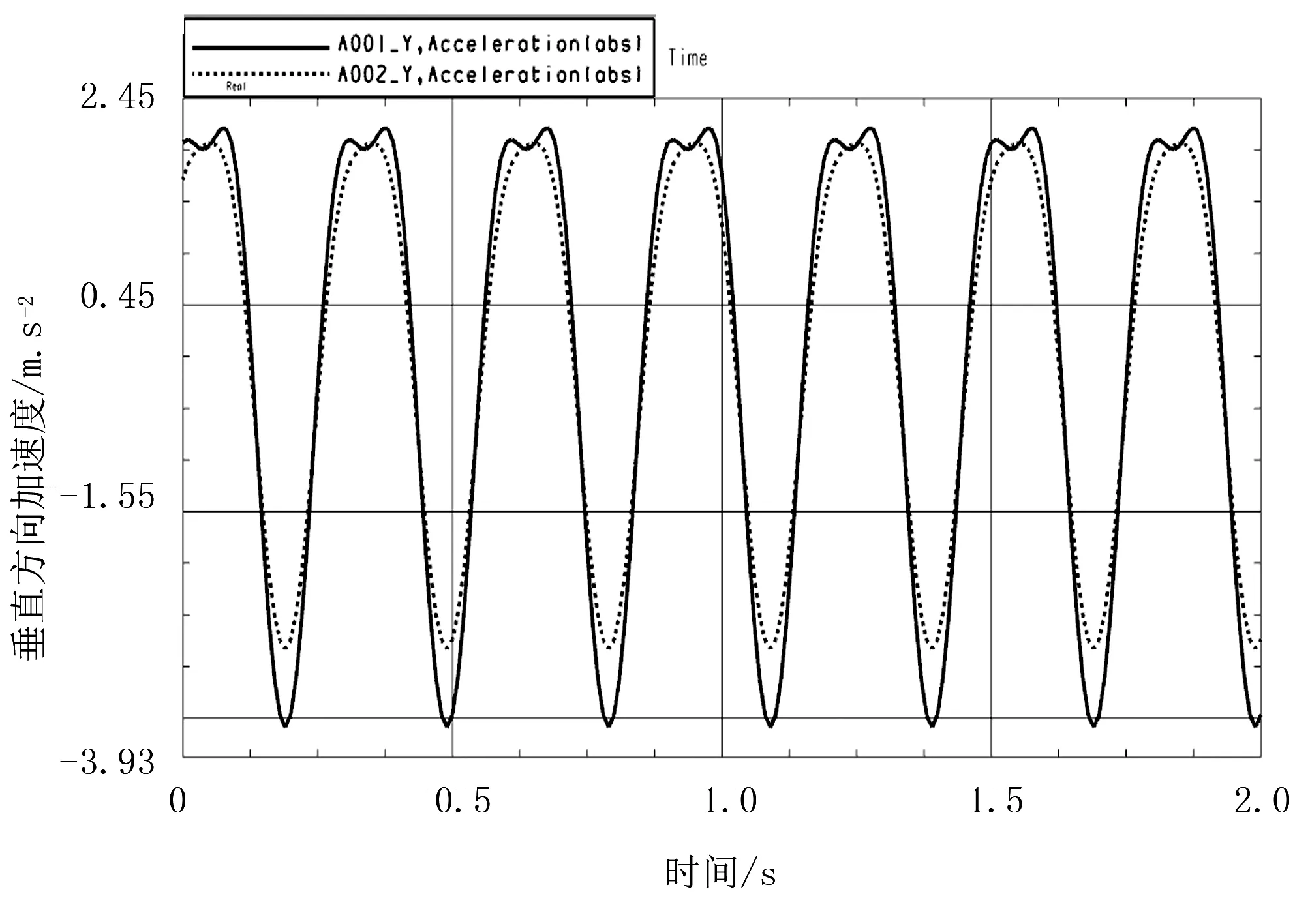
(c) 300mm圖8 篩條長(zhǎng)度改變后垂直方向加速度Fig.8 Vertical direction acceleration after the length of the screen is changed
為獲取篩條長(zhǎng)度與垂直方向加速度的具體函數(shù)關(guān)系,對(duì)圖6所示兩點(diǎn)A001與A002的垂直方向加速度的極值點(diǎn)進(jìn)行標(biāo)記,獲取極值點(diǎn)的數(shù)據(jù)如表2所示。

表2 篩條長(zhǎng)度改變后垂直方向加速度Table 2 Vertical direction acceleration after the length of the screen is changed
經(jīng)過(guò)計(jì)算得到如下函數(shù)式子,即
a2y=4.195x2+1.6175,x∈(x0,x2)
按照相同的方法可以求得篩條的長(zhǎng)度與水平方向加速度的關(guān)系,根據(jù)模擬的效果可知改變篩條的長(zhǎng)度不會(huì)對(duì)水平方向加速度產(chǎn)生影響,可得
a2z=14.51m/s2,x∈(x0,x2)
3 確定目標(biāo)函數(shù)與邊界條件
3.1 目標(biāo)函數(shù)的確定
根據(jù)前文的論述獲得了分離篩擺桿與一級(jí)分離篩垂直與水平方向的規(guī)律及分離篩篩條與二級(jí)分離篩垂直于水平方向加速度的規(guī)律,根據(jù)規(guī)律可得兩個(gè)目標(biāo)不具可度性。為獲取統(tǒng)一的目標(biāo)函數(shù),對(duì)兩個(gè)子目標(biāo)函數(shù)分別賦權(quán),獲取目標(biāo)的函數(shù)模型為
aymax=ψa1y+ξa2y
對(duì)于多目標(biāo)函數(shù)加權(quán)因子的確定主要考慮兩個(gè)目標(biāo)函數(shù)的重要性和兩個(gè)函數(shù)數(shù)量級(jí)的差別,由于本函數(shù)的兩個(gè)分函數(shù)的本征權(quán)相同,可取對(duì)等數(shù)。因此,加權(quán)因子的確定,主要由校正權(quán)來(lái)確定,即需要確定數(shù)量級(jí)差異。由表1、表2可知:擺桿每改變一個(gè)數(shù)量級(jí)垂直方向的加速度將改變8個(gè)數(shù)量級(jí),而篩子篩條長(zhǎng)度每改變一個(gè)數(shù)量級(jí)垂直方向加速度將改變3.4個(gè)數(shù)量級(jí),按此配比可得到賦權(quán)數(shù)ψ為7.02,賦權(quán)數(shù)ζ為2.98,因此目標(biāo)函數(shù)為
aymax=7.02a1y+2.98a2y
篩條縮短長(zhǎng)度和擺桿長(zhǎng)度的交互作用對(duì)馬鈴薯收獲機(jī)分離篩垂直方向加速度的影響如圖9所示。由圖9可知:擺桿的長(zhǎng)度越長(zhǎng),篩條縮短的長(zhǎng)度越短擺動(dòng)分離篩垂直方向加速度越小。當(dāng)擺桿長(zhǎng)度為400~450mm、篩條長(zhǎng)度縮短100~150mm時(shí),加速度符合預(yù)期效果。

圖9 擺桿與篩條的長(zhǎng)度對(duì)垂直方向加速度影響Fig.9 Effect of length of swing bar and screen strip on acceleration in vertical direction
3.2 尋找邊界要素
進(jìn)行結(jié)構(gòu)優(yōu)化除了確立目標(biāo)函數(shù),還需要尋找邊界約束條件,依據(jù)以上研究結(jié)果及相關(guān)因素,現(xiàn)提出如下的約束邊界條件:
1)第一級(jí)分離篩垂直方向的分離能力大于第二級(jí)分離篩垂直方向的分離能力即a1y>a2y,帶入函數(shù)式子可得約束條件為
2)第一級(jí)分離篩水平方向的輸送能力不超過(guò)第二級(jí)分離篩水平方向的輸送能力,即a1z≤a2z,帶入函數(shù)式子可得約束條件為
3)第一級(jí)分離篩篩條長(zhǎng)度與第二級(jí)分離篩篩條長(zhǎng)度疊加應(yīng)在無(wú)土范圍之內(nèi),即
100mm 4)為確保改進(jìn)后收獲機(jī)不發(fā)生干涉,分離篩擺桿不能超過(guò)懸掛的極限位置,即 x1≤428mm 5)曲柄轉(zhuǎn)速在合理的范圍之內(nèi),即 180r/min 按照約束條件得重要性,約束邊界的優(yōu)先級(jí)為:1)>2)>3)=4)>5)。 綜上所述,在不改變其他因素的情況下確定最終的優(yōu)化模型為 由于本優(yōu)化中的兩個(gè)子目標(biāo)函數(shù)性質(zhì)相同所以不能采用乘除法,且目標(biāo)函數(shù)的子函數(shù)之間也無(wú)法按照預(yù)先確定的方式進(jìn)行讓步,構(gòu)建統(tǒng)一目標(biāo)也不能采用統(tǒng)一目標(biāo)函數(shù)法。因此,本文將采用協(xié)調(diào)曲線(TQSP)法進(jìn)行優(yōu)化。 前文在確定加權(quán)因子時(shí)已對(duì)目標(biāo)函數(shù)之間的讓步做出了分析,確定了最終的目標(biāo)曲線及滿意曲線,按照此匹配關(guān)系轉(zhuǎn)化為單目標(biāo)函數(shù),此時(shí)再按照單純型法并借助MatLab進(jìn)行編程,計(jì)算得到最優(yōu)結(jié)果。根據(jù)在MatLab中優(yōu)化可得參數(shù)的最優(yōu)結(jié)果如表3所示。 表3 分離篩結(jié)構(gòu)優(yōu)化結(jié)果Table 3 Optimization results of separation sieve structure 通過(guò)對(duì)擺桿和篩條長(zhǎng)度的修改,使得第一級(jí)分離篩在垂直方向上的加速度提高且超過(guò)第二級(jí)分離篩垂直方向的加速度,改變了以往馬鈴薯在分離篩上振動(dòng)遞增的篩分方式,修改分離篩篩條的長(zhǎng)度后使得馬鈴薯減少了在無(wú)土篩面上的碰撞。通過(guò)前期的試驗(yàn)可知:馬鈴薯挖掘機(jī)在曲柄轉(zhuǎn)速230r/min、前進(jìn)速度為2.03km/h時(shí),明薯率可達(dá)98.94%,破皮率為0.21%。經(jīng)過(guò)優(yōu)化后;擺桿的長(zhǎng)度增加到420mm,將進(jìn)一步降低馬鈴薯的破損,提高生產(chǎn)率。 采用虛擬仿真技術(shù),獲取馬鈴薯挖掘機(jī)分離篩在不同方向上的運(yùn)動(dòng)規(guī)律,并按照理論分析提出的思路,對(duì)分離篩的結(jié)構(gòu)做出改進(jìn)。改進(jìn)后的分離篩將分離功能向第一級(jí)分離篩集中,將輸送功能向第二級(jí)分離篩集中,并減少馬鈴薯在二級(jí)分離篩上的接觸時(shí)間,實(shí)現(xiàn)兩級(jí)篩子功能分離。運(yùn)用優(yōu)化設(shè)計(jì)的方法,輔助使用MatLab軟件獲取最終的優(yōu)化方案,得出實(shí)現(xiàn)功能所需的擺桿長(zhǎng)度為420mm,篩條的長(zhǎng)度是595mm。通過(guò)本文的優(yōu)化,使分離篩增大了薯土分離能力,減少了馬鈴薯的損傷。3.3 目標(biāo)函數(shù)的優(yōu)化

4 結(jié)論
猜你喜歡
計(jì)算機(jī)應(yīng)用(2023年1期)2023-02-03 03:09:28音樂(lè)天地(音樂(lè)創(chuàng)作版)(2022年10期)2023-01-13 05:47:42湘潮(上半月)(2022年5期)2022-12-06 03:02:28計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36數(shù)學(xué)小靈通(1-2年級(jí))(2021年3期)2021-04-13 01:01:58計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38數(shù)學(xué)小靈通·3-4年級(jí)(2017年11期)2017-11-29 01:35:50