基于表皮損傷的黃瓜采摘臂結構參數優化
2019-05-27 08:56:14高國華鄭玉航
農機化研究 2019年11期
高國華,鄭玉航,馬 帥
(北京工業大學 機械工程與應用電子技術學院,北京 100124)
0 引言
我國是一個農業大國,農業生產作為關系到經濟社會發展的根本,近年來發展迅速。據保守估計,目前中國蔬菜總產值已超過1.2萬億元,占種植業總產值比例超過33% ,約占農民人均收入的14%[1-4]。在蔬菜生產中,黃瓜是作為重要蔬菜品種被大面積種植,且已成為主要的溫室農產品之一[5-8]。果實采摘作為黃瓜生產中最耗時、最費力的環節,長期以來都主要依靠工人完成。普通工人人均每小時可以采摘黃瓜30~35kg,勞動強度大、采摘效率低、成本高。因此,實現黃瓜的機械化采摘已成迫切需求。從20世紀起,以歐美、日本為代表的發達國家,如美國、日本、荷蘭、比利時、法國和英國等就在采摘機器人上開展了大量的研究工作。日本KNODO等人采用三菱RH-6SH5520型4自由度的工業機器臂,研制了只可以進行整串番茄采摘的番茄采摘機器人[9-11]。荷蘭農業環境工程研究所于1996年研制了多功能黃瓜采摘機器人[12-15]。日本澀谷精機株式會社研制了用于草莓收獲的采摘機器人,其采摘成功率較低,尚不能滿足使>用要求[16]。佛羅里達大學的Mehta等人研制了7自由度柑橘采摘機器[17-18]。我國對采摘機器人的研究始于20世紀90年代中期[19],中國農業大學的李偉等人研制了黃瓜采摘機器人具體結構[20-21];江蘇大學趙德安、趙慶波和楊文亮等人設計了一種具有整體升降和小臂伸縮功能的蘋果采摘機器人[22]。
目前,針對采摘機器人的機械結構及運動控制、位置識別都有了一定的研究,但還都處于樣機階段,采摘成功率、效率都有待于提高。因此,設計一種可靠的采摘機械極為重要。文章中涉及的是一種黃瓜采摘機械臂,對采摘機械臂的機構運動過程進行了理論與仿真分析,在證明方案可行的基礎上進行樣機制作,并通過樣機試驗結果確定采摘機械臂中存在的問題和缺陷。
1 采摘機械臂設計
1.1 設計目標
基于前期對采摘機器人的調研,黃瓜采摘機器人的設計目標:
1)為提高效率、降低成本,采摘機械臂應采用機構組合的方式,避免使用傳統的關節型機械臂;
2)為更加利于推廣、降低視覺識別等難度,盡量用機械特點來實現采摘定位功能。
1.2 采摘機械臂結構設計
基于以上目標,黃瓜采摘機械臂應集成手臂伸縮、黃瓜摘取和黃瓜運送幾個功能,主要由切刀、擺動氣缸、上層機械臂、滑道、護板、前連桿、軸、滾輪、直線滑臺、后連桿、滑軌,以及下層機械臂組成,如圖1所示。

1.切刀 2.擺動氣缸 3.上層機械臂 4.直線滑臺 5.下層機械臂 6.滑軌 7.滾輪 8.軸 9.后連桿 11.護板 10.前連桿 12.滑道圖1 黃瓜采摘機械臂Fig.1 The cucumber harvesting manipulator
工作過程中,當確定目標黃瓜位置后,上層機械臂伸出并用V形卡槽將瓜梗限制住,安裝于前端的擺動氣缸驅動切刀對瓜梗進行旋切,完成黃瓜的摘取。在上層機械臂伸出的過程中,護板連同固定于其上的滑道一起伸出;部分滑道凸出在機械臂前端,滑道首先與目標黃瓜接觸病將其推動至傾斜狀態(見圖1),當瓜梗被切斷后,黃瓜落入位于正下方的滑道中。當機械臂伸出時,滑道整體處于水平位置來承接黃瓜,當黃瓜落入滑道后手臂收回,帶動滾輪處于滑軌低水平面,使滑道處于傾斜狀態。滑道由多組輥子組成,由于重力作用,黃瓜會沿傾斜的滑道滑入后方進行收集。
1.3 問題現象描述
工作過程中,黃瓜采摘機械人機械臂需要對黃瓜進行預先作用,將黃瓜推動至傾斜狀態,然后擺動氣缸驅動切刀旋轉將瓜秧切斷,黃瓜自由落入下方的滑道上,機械臂收回黃瓜滑落至后方,如圖2所示。

圖2 機械臂采摘黃瓜作業流程Fig.2 The working procedure of picking cucumber by robotic manipulator
按照設計思路,黃瓜被切下后會落到滑道中,完成采摘。但在對采摘機械臂樣機進行實際測試過程中,發現存在如下問題:瓜秧被切斷后,黃瓜雖能夠按照預期落入下方的滑道,會與滑道接觸產生一定程度的碰撞,造成黃瓜表皮的損傷,如圖3所示。

圖3 黃瓜表皮損傷Fig.3 Epidermal injury of cucumber
基于樣機實際測試發現的以上問題和缺陷,對采摘成功率和采摘效果影響較大。因此,擬通過對采摘過程中黃瓜與機構的作用關系進行受力分析和參數模型建立,提出優化約束條件,完成對采摘機械臂的結構參數優化,最終解決以上問題。
2 采摘機械臂與黃瓜作用關系研究及結構參數優化
2.1 黃瓜物理性能參數測定
經過以上分析可以發現,目前采摘機械臂存在的主要問題都發生在機構與黃瓜相互作用過程中。為了對此進行研究,需要對采摘對象黃瓜進行物理及力學性能參數測定,為參數建模和優化工作做好準備。
2.1.1 外形參數測量
如圖4所示:利用游標卡尺對黃瓜外形尺寸進行測量,測量結果如表1所示。

圖4 黃瓜樣本Fig.1 The sample of cucumber表1 黃瓜外形測量結果統計Table1 Statistical results of cucumber shape measurement

參數瓜長L/mm瓜重m/g直徑d/mm平均值341.9192.234.895標準差28.5853.492.138變化范圍(313.317,370.483)(138.7,245.69)(33.755,37.0342)
2.1.2 密度的測量
黃瓜的密度是黃瓜單位體積的質量,是其重要的基本物理指標之一。依據質量式(1)得
m=ρ·v
(1)
其中,m為質量;v為體積;ρ為密度。
利用燒杯對黃瓜體積進行測量。事先將燒杯中放入定量水后,將黃瓜放入燒杯,并記錄放入黃瓜前后燒杯內液面變化情況,則可以得到黃瓜的體積大小,進而利用公式計算出黃瓜的密度ρ=356kg/m3[23]。
2.2 黃瓜力學性能參數測定
2.2.1 黃瓜彈性模量及泊松比測定試驗
試驗中將黃瓜切成黃瓜段,通過測量黃瓜段原長、壓縮長度變化量、擠壓力和黃瓜段橫截面積,可以按式(2)計算出彈性模量的值[24],即
(2)
其中,E為彈性模量;σ為應力;ε為應變;F為正壓力;A為初始橫截面積;l為原始長度;Δl為長度變化值。
(3)
其中,K為體積模量;σ為應力;Δv為體積變化量;v為原始體積;S為原始橫截面面積;S′ 為壓縮后橫截面面積;d為初始直徑;d′為壓縮后直徑。
(4)
其中,μ為泊松比;K為體積模量;E為彈性量。
本試驗使用的是MWD-10B手動電子式人造板萬能試驗機。對于黃瓜彈性模量的測量,本文基于MWD-10B手動電子式人造板萬能試驗機,利用百分表、游標卡尺、薄鋼板來進行試驗,原理如圖5所示。

圖5 黃瓜參數測定試驗Fig.5 Cucumber parameter test
本文共進行14組測定試驗,試驗記錄和結果如表2所示。基于以上試驗原理與式(2),便可以計算出黃瓜的彈性模量E。同時,利用式(3)可以計算出黃瓜的體積模量[25],并通過式(4)得到黃瓜的泊松比。
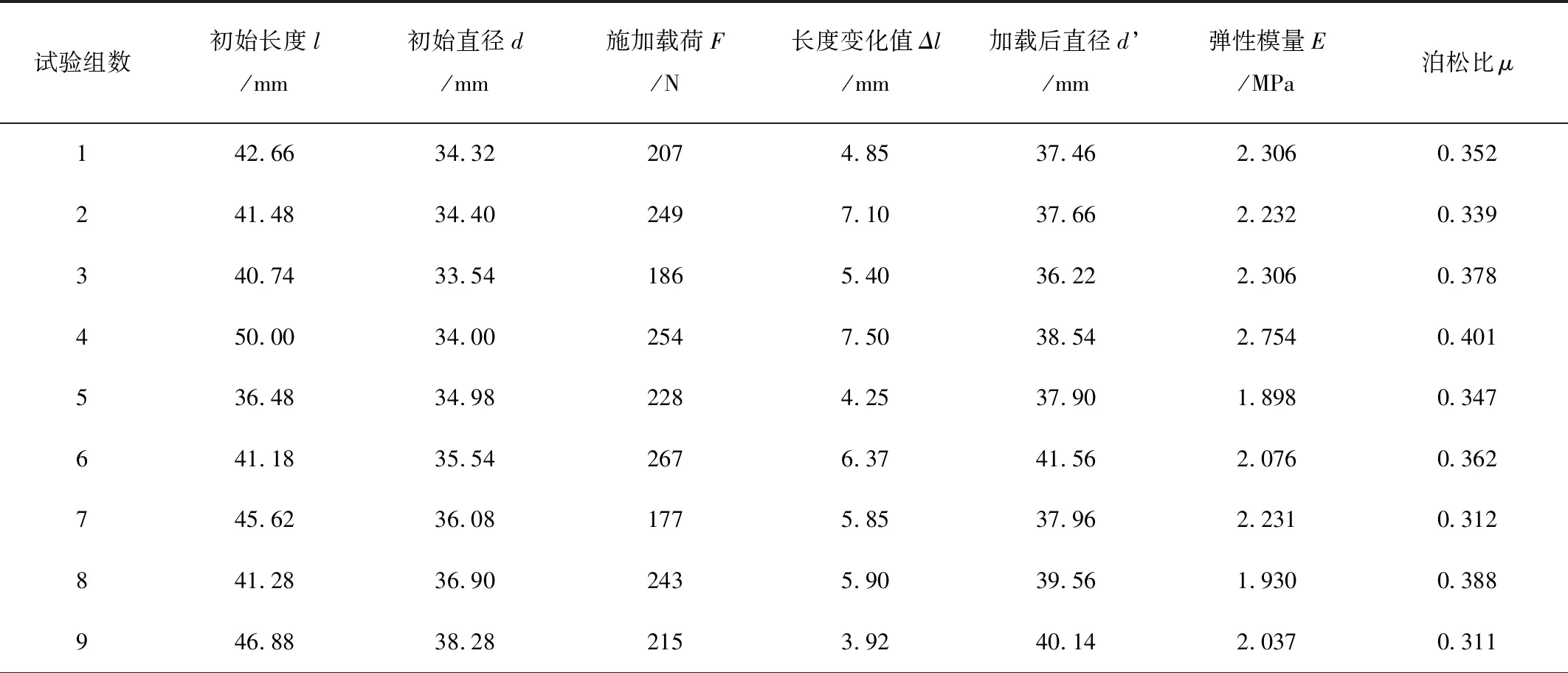
表2 黃瓜彈性模量及泊松比測定試驗結果統計Table 2 Statistical test results for modulus of elasticity and poisson's ratio of cucumber

續表2
根據表2的試驗結果,取多次測定結果的平均值作為最后的試驗結果,黃瓜的彈性模量為1.886MPa,泊松比為0.646。
2.2.2 黃瓜恢復系數測定試驗
物體碰撞過程研究中,恢復系數是一個重要的力學參數,且只與碰撞物體的材料有關。因此,恢復系數的測定對黃瓜與機構碰撞作用的研究十分必要。
如圖6所示,進行黃瓜恢復系數的測定試驗[26]。

圖6 黃瓜恢復系數測定原理Fig.6 The text principle of cucumber recovery coefficient
基于式(5)求得黃瓜與PC塑料碰撞的恢復數為
(5)
其中,e為恢復系數;α為自由下擺的擺動始角;β為回彈角。
初始角度和回彈角這2個參數用高速相機測量,試驗中選定的拍攝幀率為2 000幀/s。通過多次試驗的測定,根據表3的試驗結果統計,得到黃瓜與PC塑料碰撞的恢復系數為0.391 2。
2.3 黃瓜碰撞損傷問題研究
2.3.1 問題分析
如圖7所示:在黃瓜所受重力G和支持力N的作用點不同且大小不等的情況下,會產生力矩ΣM。因此,斷秧后的黃瓜會以黃瓜與滑道接觸點為支點的進行順時針轉動,進而落至下方的滑道上。在這個過程中,黃瓜會與滑道產生碰撞,從而導致黃瓜表皮的損傷。

表3 黃瓜恢復系數測定試驗結果統計Table 3 Statistical test results for recovery coefficient of cucumber

圖7 機械臂采摘作業參數示意圖Fig.7 Schematic diagram of manipulator picking parameters
鑒于如上分析,黃瓜墜落并落至滑道的過程可以分為如下兩個過程:
1)黃瓜瓜秧被切斷到黃瓜落至滑道之前,即黃瓜擺動下落過程;
2)黃瓜與滑道碰撞接觸,即碰撞過程。
2.3.2 黃瓜受力及運動分析
2.3.2.1 基于動能定理的黃瓜擺動過程分析
動能定理應用過程只涉及物體運動的始末狀態。在瓜秧被切斷的瞬間,黃瓜是靜止的,此刻黃瓜動能為零;而在黃瓜擺動過程中,只有重力G做功,并完全轉化為黃瓜擺動的動能。
基于統計結果,黃瓜橫截面的直徑d標準差僅為2.138mm,波動范圍很小,橫截面可以近似為圓形。由此,根據式(6)、式(7)可以得到黃瓜質量表達式。
已知黃瓜質量與黃瓜長度成正比關系,比例系數k為34.08。
m=kL
(6)
其中,m為黃瓜質量;k為比例系數;L為黃瓜長度。
(7)
其中,d為黃瓜直徑平均值;ρ為黃瓜密度。
Δm=ρS(dL0)
(8)
h=Lsinα
(9)
其中,h為采摘切刀斷到滾輪垂直距。
(10)
其中,W為黃瓜擺落過程做的功。
黃瓜重力做功全部轉化為動能。與重力做功計算相同,如式(11)所示,即
(11)
其中,ΔE為動能變化量;ω為黃瓜擺動角速度;J為轉動慣量。
最終,根據動能定理,動能變化量等于總做功,則可以得到黃瓜擺落至滑道的瞬時角速度ω表達式,如式(12)、式(13)所示,即
ΔE=W
(12)
(13)
2.3.2.2 基于動量定理的黃瓜碰撞過程分析
由式(14)可知:要想利用動量定理對得到黃瓜碰撞力與參數之間的關系,就必須求得動量變化量ΔP和碰撞時間Δt,有
ΔP=FΔt
(14)
其中,ΔP為動量變化量;Δt為黃瓜與滑道碰撞時間;F為碰撞力。
基于上述對黃瓜擺落過程的分析,將擺動角速度ω表達式帶入式(15),便可以求得黃瓜與滑道碰撞過程中動量變化ΔP,即
(15)
其中,J為轉動慣量。
由彈性力學原理及文獻[27]可知,兩球(m1,m2)相撞時,撞擊時間計算公式為
(16)
其中,M為兩球的折合質量;n為與兩球性質有關的常數;en為兩球碰撞恢復系數;vn0為兩球碰撞瞬時速度。
M和n可按式(17)和式(18)進行計算,即
(17)
(18)
其中,E1、E2為兩球的彈性模量;μ1、μ2為兩球的泊松比;R1、R2為兩球的半徑。
滑道輥子材料為PE塑料,通過查找文獻,可知輥子的參數如下:彈性模量為1 070MPa;泊松比為0.410 1;滾輪質量5g;滾輪直徑為7.5mm。將前期測定的黃瓜參數與滑道輥子參數帶入式(16),求得黃瓜與滑道碰撞時間表達式為
(19)
黃瓜運動狀態為擺動,在擺動角速度一定的情況下,不同碰撞接觸點的碰撞速度vmax也有所不同。因此,為保證后期優化過程中黃瓜與滑道碰撞力在破壞范圍內,所以取碰撞速度最大值帶入式(19)。其中,最大碰撞速度出現在黃瓜瓜秧切斷處,即最大速度vmax表達式為
(20)
綜合上述分析與計算,應用動量定理對黃瓜與滑道碰撞力的采摘參數表達式進行求解,則有
(21)
2.3.3 黃瓜碰撞損傷問題參數優化
2.3.3.1 構建優化關系模型
基于碰撞力表達式,可知黃瓜與滑道碰撞過程中碰撞力F只與黃瓜長度L、滑道接觸點之上部分的黃瓜長度a及切斷時黃瓜與水平方向夾角α有關3個參數有關。碰撞力是這3個參數的函數,即優化關系模型,則有
F=f(a,α,L)
(22)
而通過查閱文獻[28]可知:黃瓜表皮破損受力邊界值為13.56N。但考慮到優化結果的可靠性,設定碰撞力的安全系數為1.2,則根據式(23),黃瓜與滑道輥子碰撞的許用碰撞力為11.3N。
(23)
其中,[F] 為許用碰撞力;F為碰撞力邊界值;σ為安全系數。因此,碰撞力小于或等于11.3N,得到如參數關系模型為
(24)
2.3.3.2 確定優化參數取值范圍
根據碰撞力所涉及的3個參數,對其合理取值范圍進行確定。按照之前統計結果,黃瓜長度取值L∈(313.317,370.483)mm。對于切斷時黃瓜與水平方向夾角α,根據文獻[29]可知,α∈(0°,51.496°)。對于滑道接觸點之上部分的黃瓜長度a,按照切斷瓜秧瞬時黃瓜擺動方向的要求,力矩之和應大于零,則a∈(0.5L,L)。具體取值范圍如下:黃瓜長度L∈(313.317,370.483)mm;黃瓜與水平方向夾角α∈(0°,51.496°);接觸點以上部分的黃瓜長度∈(0.5L,L);碰撞力F∈(0,11.3)N。
2.3.3.3 基于碰撞力的采摘參數優化
1)參數a(黃瓜與滑道接觸點之上部分的黃瓜長度)優選。由圖7可知:參數α與a本質都是采摘機械臂的結構參數,通過調整這兩個參數,便可以改變碰撞力F的大小,最終避免碰撞黃瓜表皮損傷。本文基于碰撞力優化關系模型,首先根據黃瓜長度的L變化范圍,分別選取黃瓜長度L為313mm和370mm,利用MatLab軟件對參數α、a與碰撞力F在參數取值范圍內的關系圖進行繪制,如圖8所示。

圖8 不同L取值時α、a與F關系圖Fig.8 The relationship between α, a and F in different values of L
由圖8可知:當黃瓜長度L取兩極值時,兩曲面出現相交的情況;當參數a取值大于a0時,碰撞力F隨黃瓜長度L增加而增大;當參數a取值小于a0時,碰撞力F隨黃瓜長度L增加而減小。由此可以得出:雖然黃瓜長度L會在不同參數取值的情況下影響碰撞力F大小,但卻存在一個a0值,使得不同黃瓜長度L對碰撞力F大小的影響程度最小。此時,a0則為黃瓜與滑道接觸點之上部分的黃瓜長度a的取優取值。
為驗證以上猜想,本文又在α取值為25°、a分別取值0.185、0.25、0.293、0.31、0.37m的情況下,利用MatLab軟件繪制碰撞力F與黃瓜長度L的關系圖,如圖9所示。

圖9 黃瓜長度L與碰撞力F關系圖Fig.9 The relationship between L and F
基于以上分析,通過統計一組黃瓜長度L所對應的一組碰撞力F取值變化的標準差,得到適用于所有尺寸范圍內黃瓜長度的前提下,不同a取值下黃瓜長度L對碰撞力F影響程度的大小。最終,基于碰撞力F取值變化標準差,選取出使得對于所有黃瓜長度下對應碰撞力標準差最小的a的取值。
利用MatLab軟件,得到碰撞力標準差σ與參數a的關系圖,如圖10所示。

圖10 參數a與碰撞力標準差F關系圖Fig.10 The relationship between the parameter a and the standard deviation of impact force F
通過統計得到當a取0.293m時,碰撞力F的標準差σ最小,即黃瓜長度L對碰撞力F影響最小。因此,a最優取值為0.293m。
2)參數α(切斷時黃瓜與水平方向夾角)優選。在a取值為0.293m時,若α取值一定,則對于所有尺寸范圍內的長度L,對應一個最大碰撞力Fmax,如圖11所示。若要確保參數優化后的碰撞力F絕對小于黃瓜表皮破損的碰撞力,則需要選取最大的Fmax取值所對應的L值,將碰撞力極限值11.3N帶入優化關系模型后求出α值。
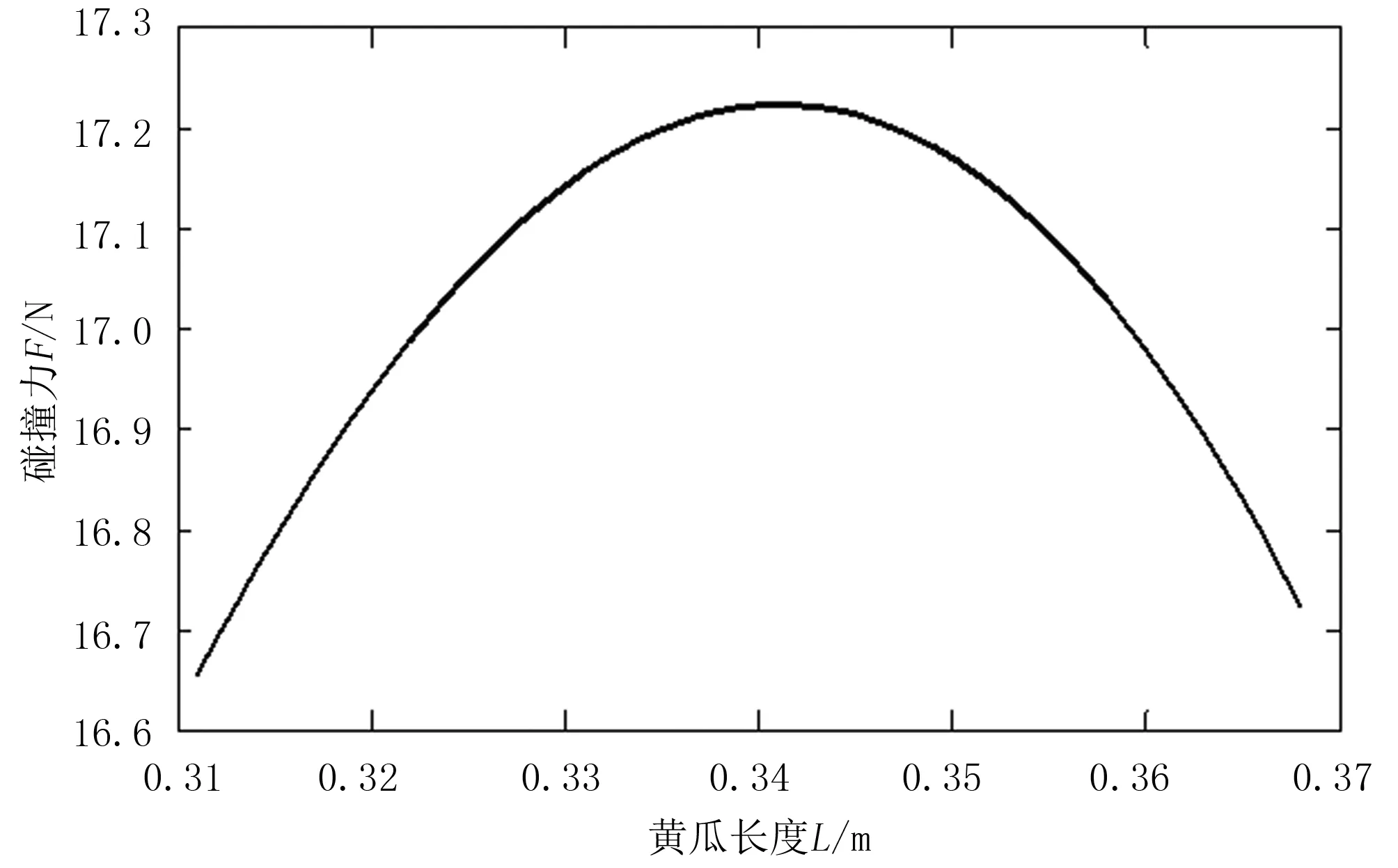
圖11 黃瓜長度L與碰撞力F關系圖Fig.11 The relationship between the parameter L and F
在以上分析的基礎上,本文利用MatLab軟件繪制切斷時黃瓜與水平方向夾角α與碰撞力最大值Fmax的關系圖,如圖12所示。當α取值為0.898rad時,對應Fmax最大值。因此,需對當α取值為0.898rad、a取值為0.293m時,滿足碰撞力F最大值所對應的黃瓜長度瓜長度L取值進行求解。

圖12 不同α與碰撞力最大值Fmax關系圖Fig.12 The relationship between the maximum value of collision force Fmax and α
如圖13所示:基于上述分析,黃瓜長度L的取值為0.342m,便可以將a=0.293m、L=0.342m和F=11.3N帶入到碰撞力優化關系模型,進而得到最優夾角α=0.638 1rad。
由此,根據圖7中機構的幾何關系,得到最終的參數優化結果,即對于所有尺寸范圍內不同長度的黃瓜,當滑道接觸點之上部分的黃瓜長度a=0.293、切斷時黃瓜與水平方向夾角α=0.638 1rad,即采摘切刀段到滾輪垂直距離h=0.174 5m、采摘伸出端長度d=0.235 3m時,黃瓜與滑道碰撞時的碰撞力小于11.3N,黃瓜表皮不會被損傷。

圖13 α=0.898rad、a=0.293m時的F與L關系圖Fig.13 The relationship between F and L when α equals to 0.898rad and a equals to 0.293m
3 采摘機械臂優化結果試驗驗證
在完成方案設計的基礎上,針對黃瓜采摘機械臂存在的缺陷,已通過理論、仿真、試驗的方法對機械臂進行了優化,并得到最優參數組合。本文基于優化結果,對改進后采摘機械臂樣機進行制作,設計試驗對采摘優化效果進行驗證。
3.1 優化樣機制作
基于采摘機械臂設計方案與第一代機械臂樣機,針對其存在的黃瓜表皮損傷的問題進行優化,并得到了最優參數組合,并完成樣機制作。具體參數調整取值如表4所示。
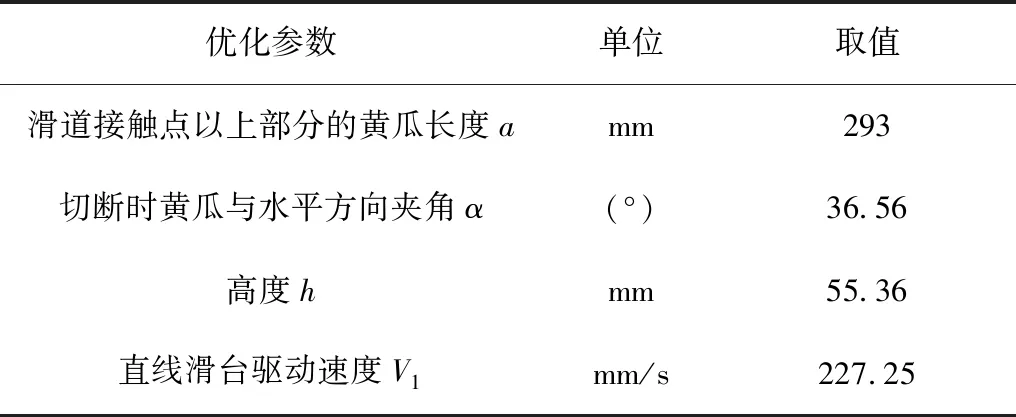
表4 改進樣機優化參數取值Table4 Optimizing parameters of improved prototype
完成優化改進后黃瓜采摘機械臂二代樣機的制作,如圖14所示。

圖14 改進后黃瓜采摘機械臂樣機Fig.14 Improved cucumber picking machine arm prototype
3.2 黃瓜采摘驗證試驗
3.2.1 試驗目的
驗證試驗的目的是為了檢驗黃瓜采摘機械臂進行采摘作業完成情況,其主要測試內容為黃瓜表皮損傷。通過對試驗過程中所測得的試驗數據進行統計分析,將其與預期優化結果進行比較,對優化效果進行驗證。
3.2.2 試驗設計
本次試驗基于改進后的黃瓜采摘機械臂樣機,進行50次黃瓜采摘作業。將黃瓜果實用細線繩固定于橫梁支架上,模擬出橫向黃瓜種植模式中黃瓜的生長狀態。在每次采摘作業過程中,對采摘完成后黃瓜表皮損傷情況進行檢查,最終對50次作業的情況進行統計,完成黃瓜采摘機械臂優化效果的評價。
3.2.3 試驗結果與分析
本次采摘試驗共進行50次,通過對樣機采摘情況的記錄與統計,得到驗證試驗結果如表5所示。試驗中,表皮損傷情況出現1次,相比一代樣機的采摘效果明顯提升,證明優化結果有效。

表5 采摘失敗現象統計Table 5 Picking failure statistics
4 結論
1)基于機械臂樣機采摘試驗中發現的問題,對黃瓜與采摘機械臂中機構的作用過程進行了分析。即分析總結樣機缺陷,對黃瓜表皮破損的問題進行研究,對黃瓜物理力學性能參數進行測定,得到采摘作業過程中作用對象黃瓜與執行機構之間的作用關系模型,完成關鍵結構參數的選取,最終得到關鍵結構參數的最優取值。
2)進行黃瓜基本物理性能參數的測量試驗,利用萬能試驗機和百分表完成了黃瓜的壓縮試驗,得到黃瓜彈性模量、泊松比的取值。同時,應用高速攝像技術對黃瓜的恢復系數進行測定,為作用對象黃瓜與執行機構之間參數關系模型的建立和優化提供基礎。
3)針對黃瓜表皮損傷問題,將碰撞過程分為黃瓜旋轉擺動和黃瓜與滑道碰撞兩個過程。將碰撞力極限值11.3N、黃瓜長度 0.342m和滑道接觸點以上部分的黃瓜長度0.293m帶入建立的關系模型中,得到切斷時黃瓜與水平方向夾角α的最優取值為0.638 1rad。最后,根據優化結果進行樣機檢測試驗,證明優化結果有效。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09