顧及多因子的大壩變形預(yù)測模型對比分析
2019-05-25 02:42:32范城城施宇軍
桂林電子科技大學(xué)學(xué)報(bào) 2019年6期
范城城, 周 呂, 施宇軍, 劉 清, 李 彬
(1.中國科學(xué)院 微小衛(wèi)星創(chuàng)新研究院,上海 201210;2.桂林理工大學(xué) 測繪地理信息學(xué)院,廣西 桂林 541000;3.廣西壯族自治區(qū)自然資源遙感院,南寧 530023)
變形是指變形體受內(nèi)外影響因子的影響,其形狀、大小、位置在時(shí)間域和空間域中的變化[1]。變形是自然界普遍存在的一種現(xiàn)象,變形體包括人工建筑與自然物體等,當(dāng)變形體的形變超過一定的允許范圍,就可能引發(fā)自然災(zāi)害或工程災(zāi)害,如山體滑坡、地面塌陷、大壩垮塌、橋梁斷裂、建筑物倒塌等。變形分析與預(yù)報(bào)是對變形監(jiān)測數(shù)據(jù)進(jìn)行處理,對變形體在時(shí)間與空間域上的變形性態(tài)進(jìn)行描述,對變形的發(fā)展態(tài)勢進(jìn)行預(yù)測、預(yù)警與預(yù)報(bào)[2]。隨著國民經(jīng)濟(jì)的持續(xù)發(fā)展與穩(wěn)步增長,高層建筑物、特大橋梁、大型工業(yè)建筑物、特長隧道、大型水壩等大型工程建(構(gòu))筑物不斷涌現(xiàn)。對工程建筑物進(jìn)行變形監(jiān)測,并進(jìn)行變形分析與預(yù)測的目的就是為了及時(shí)掌握建筑物的工作狀態(tài),確保建筑物的安全。在施工或運(yùn)營期間,工程建筑物受各種荷載的影響會產(chǎn)生變形,當(dāng)變形量超過一定范圍,就可能會引發(fā)工程質(zhì)量事故或工程災(zāi)害。
20世紀(jì)80年代以來,對變形分析與預(yù)測的研究在我國得到了普遍推廣。隨著各類建筑物的結(jié)構(gòu)日益復(fù)雜,引發(fā)建筑物形變的因子多且隨機(jī)性強(qiáng),逐步回歸分析、灰色系統(tǒng)理論、Kalman濾波、小波分析、混沌理論以及BP神經(jīng)網(wǎng)絡(luò)等各種新理論與方法逐漸應(yīng)用于變形分析與預(yù)測建模中,并取得了一定研究成果。隨著科學(xué)技術(shù)的進(jìn)步與計(jì)算機(jī)技術(shù)的發(fā)展,越來越多的理論和技術(shù)方法應(yīng)用于變形分析與預(yù)測研究。由于各類建筑物變形的復(fù)雜化,單一理論與方法難以滿足精確的變形分析與預(yù)測,需要發(fā)揮各種方法的優(yōu)點(diǎn),將多種理論與方法有機(jī)結(jié)合,建立組合模型,提高變形分析與預(yù)測的精度與可靠性[3-4]。目前,各種變形分析與預(yù)測方法多針對單一監(jiān)測點(diǎn)或單一時(shí)間序列分析,綜合考慮多測點(diǎn)、多物理量,建立建筑物的整體變形分析與預(yù)測綜合評價(jià)模型是一個(gè)重要的發(fā)展方向[5]。
然而對建筑物進(jìn)行變形分析與預(yù)測時(shí),只考慮單一因子影響,或主觀選定某些因子,許多情況下未能真正考慮多種有效因子對模型的客觀影響,從而影響模型的預(yù)測精度。針對這一問題,引入灰色關(guān)聯(lián)分析,通過計(jì)算多種影響因子的關(guān)聯(lián)度確定因子的取舍,將選入因子看作狀態(tài)輸入向量,納入模型中,建立顧及多因子的Kalman濾波模型,并與可顧及多因子影響的逐步回歸模型和BP神經(jīng)網(wǎng)絡(luò)模型進(jìn)行對比分析。通過分析對比新建模型與其他模型在建筑物變形預(yù)測上的精度與穩(wěn)定性,以便能應(yīng)用最有效的模型對建筑物變形進(jìn)行預(yù)測,減少災(zāi)害事故的發(fā)生。大壩變形也是工程變形當(dāng)中的常見形式[6-8],選用的工程變形案例為廣西某地的大壩變形案例。
1 變形監(jiān)測資料分析
實(shí)例分析數(shù)據(jù)來源于廣西某大壩的20期水平位移變形監(jiān)測數(shù)據(jù),并同步監(jiān)測了壩體溫度、水庫水位、水頭3個(gè)影響大壩水平位移變形的因子。
該監(jiān)測點(diǎn)的最大水平位移變形量為4.75 mm,最小水平位移變形量為0.36 mm,最大變形差為4.39 mm。隨著時(shí)間增長,變形量未呈遞增的變形趨勢,且變形趨勢具有一定周期性。為了分析時(shí)序、水庫水位、氣溫、水頭與變形量是否具有一定的相關(guān)性,根據(jù)數(shù)據(jù)生成變形量與各個(gè)影響因子的對比圖,如圖1所示。
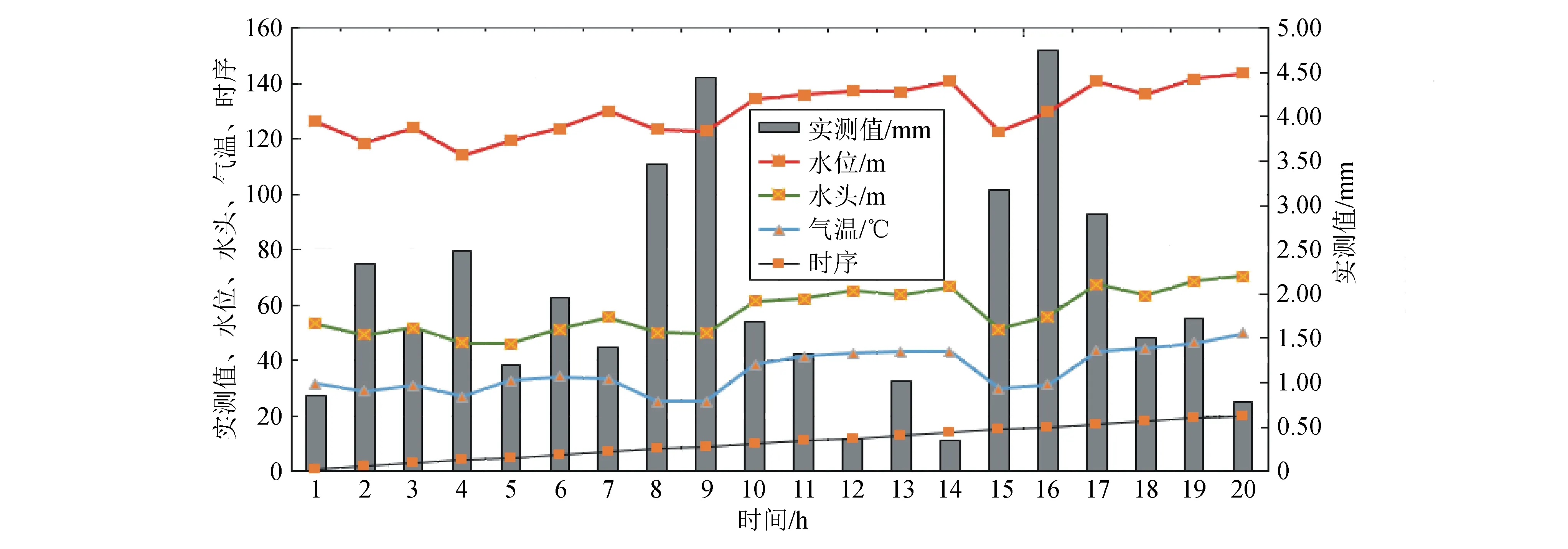
圖1 實(shí)測值與時(shí)序、氣溫、水庫水位和水頭對比分析圖
從圖1可看出,該監(jiān)測點(diǎn)的水平位移變形量與時(shí)序無明顯相關(guān)性,隨著時(shí)間的增長,變形曲線呈周期性變化;氣溫的變化與水平位移變形呈顯著的反相關(guān)關(guān)系,氣溫較低時(shí),水平變形量較大,氣溫較高時(shí),水平變形量較小;水頭與水平位移變形量之間的關(guān)系則相反,水頭較低時(shí),水平變形量較大;水庫水位與水平位移變形量之間呈一定的正比例關(guān)系。
在以下模型預(yù)測中,4種模型均采用前17期數(shù)據(jù)進(jìn)行擬合建模,后3期數(shù)據(jù)進(jìn)行預(yù)測。
2 顧及多因子的模型
2.1 顧及多因子的Kalman濾波模型建立
由以上變形資料分析可知,大壩的水平位移變形會受到多個(gè)不同因子的影響,在通過建立的模型進(jìn)行變形分析與預(yù)測時(shí),運(yùn)用標(biāo)準(zhǔn)Kalman濾波建立的僅考慮了某個(gè)因子的變形分析與預(yù)測模型,限制了模型的自適應(yīng)性,從而使得模型的擬合與預(yù)測誤差較大,難以獲得較好的預(yù)測效果。為了彌補(bǔ)這一缺陷,運(yùn)用灰色關(guān)聯(lián)分析對影響大壩水平位移變形的影響因子進(jìn)行關(guān)聯(lián)度分析,將對大壩水平變形影響較大的因子選出,并將其看作狀態(tài)向量,納入模型分析中,從而建立顧及多因子的Kalman濾波模型。
該大壩的變形監(jiān)測數(shù)據(jù)為離散數(shù)據(jù),故采用離散隨機(jī)線性系統(tǒng)的Kalman濾波,其數(shù)學(xué)模型為:
Xk=Fk/k-1Xk-1+Gk-1Wk-1,
(1)
Lk=HkXk+Vk。
(2)
其中:Xk、Lk為k時(shí)刻的狀態(tài)向量、觀測向量;Fk/k-1為k-1時(shí)刻到k時(shí)刻的狀態(tài)轉(zhuǎn)移矩陣;Gk-1為k-1時(shí)刻的動態(tài)噪聲矩陣;Wk-1為k-1時(shí)刻的動態(tài)噪聲;Vk為k時(shí)刻的觀測噪聲;Hk為k時(shí)刻的觀測矩陣。
根據(jù)最小二乘原理,可推得Kalman濾波遞推公式。
狀態(tài)向量的一步預(yù)測
(3)
狀態(tài)向量一步預(yù)測的方差矩陣
(4)
其中Qk為系統(tǒng)動態(tài)噪聲方差陣。
狀態(tài)向量估計(jì)值
(5)
狀態(tài)向量估計(jì)值的方差矩陣
Pk=(I-JkKk)Pk/k-1,
(6)
其中Jk為濾波增益矩陣,
(7)
Rk為系統(tǒng)觀測噪聲方差陣。
確定濾波初始值后,便可通過Kalman濾波遞推算法完成濾波與預(yù)測。
大壩的水平位移變形量受水庫水位、氣溫、水頭等多個(gè)影響因子的影響。為了充分考慮各影響因子對大壩水平位移變形的影響,通過灰色關(guān)聯(lián)度分析確定主要影響因子,并將其看作狀態(tài)向量,建立顧及多因子的Kalman濾波模型。
以該大壩的水平位移變形監(jiān)測數(shù)據(jù)為例,通過灰色關(guān)聯(lián)分析,計(jì)算水庫水位、氣溫、水頭、時(shí)間與變形量之間的關(guān)聯(lián)度,得到的結(jié)果為變形量受水庫水位、氣溫、水頭的影響較大。故將水庫水位、氣溫、水頭作為狀態(tài)向量引入模型中,則觀測方程為
(8)
將連續(xù)2期的觀測方程相減,得

γ?k-1ΔS+vk-1Δt+ΔV,
(9)

Lk=Hk-1Xk-1+Vk-1。
(10)
在該大壩動態(tài)變形系統(tǒng)中,大壩的動態(tài)性不強(qiáng),變化緩慢,故在初值確定時(shí),將變形加速率作為隨機(jī)干擾,并視為白噪聲,進(jìn)而可得出狀態(tài)方程與觀測方程的各個(gè)系數(shù)矩陣:
將上述系數(shù)矩陣代入式(1)、(2),可得系統(tǒng)的狀態(tài)方程與觀測方程,依據(jù)式(3)~(7),可實(shí)現(xiàn)濾波的推算過程,從而完成該大壩監(jiān)測點(diǎn)的水平變形分析與預(yù)測。
2.2 逐步回歸模型
逐步回歸分析(stepwise regression analysis,簡稱SRA)是將變量在其偏回歸平方和經(jīng)檢驗(yàn)都顯著的情況下逐個(gè)引入,同時(shí)對每個(gè)選入的新變量進(jìn)行逐個(gè)檢驗(yàn),以剔除不顯著變量,保證最后所得的變量子集中的所有變量都是顯著的,經(jīng)過若干步后便得到“最優(yōu)”變量子集[9]。
逐步回歸的數(shù)學(xué)模型為[10]
y=Xβ+ε,
(11)
其中:y為因變量;β為未知參數(shù);ε為隨機(jī)誤差;X為自變量。增加一個(gè)自變量u,相應(yīng)的資料向量為un×1,于是模型(11)可變?yōu)?/p>
(12)
其中bu為自變量u的參數(shù)。要確定變量u是否進(jìn)入變量子集,需檢驗(yàn)假設(shè)bu=0,檢驗(yàn)統(tǒng)計(jì)量為
(13)

若假設(shè)bu=0被接受,則變量u不能入選;若假設(shè)被否決,則變量u應(yīng)入選。
當(dāng)對變量進(jìn)行選入的同時(shí),還需對已選入的變量進(jìn)行顯著性檢驗(yàn),將顯著性不強(qiáng)、對模型貢獻(xiàn)率不大的已選變量進(jìn)行剔除[10]。
在變形分析中,由于變形(稱效應(yīng)量)受溫度、地質(zhì)、水位等方面的影響因子影響較多,通常選擇多元回歸分析模型,如用多元逐步回歸分析法可以建立效應(yīng)量與影響因子之間的函數(shù)模型,此模型可作大壩變形的物理解釋與變形預(yù)測[11]。在回歸分析法中,逐步回歸模型可以比較合理地選入與剔除模型的影響因子,故在大壩變形分析與預(yù)測中有較好的應(yīng)用效果。回歸分析法在進(jìn)行變形分析與預(yù)測時(shí),認(rèn)為監(jiān)測數(shù)據(jù)之間相互獨(dú)立,是一種靜態(tài)的變形分析與預(yù)測方法,只能反映效應(yīng)量與影響因子之間在同一時(shí)刻的相關(guān)性,不能體現(xiàn)變形監(jiān)測序列的時(shí)序性。
2.3 BP神經(jīng)網(wǎng)絡(luò)模型
人工神經(jīng)網(wǎng)絡(luò)(artificial neural network,簡稱ANN)是由諸多人工神經(jīng)元按照一定連接方式按權(quán)值連接構(gòu)成的網(wǎng)絡(luò)[1]。人工神經(jīng)網(wǎng)絡(luò)有近百種的神經(jīng)網(wǎng)絡(luò)模型,但在變形分析與預(yù)測中,運(yùn)用較多且較成熟的是誤差反向傳播神經(jīng)網(wǎng)絡(luò),即BP神經(jīng)網(wǎng)絡(luò)。BP神經(jīng)網(wǎng)絡(luò)是一種前饋型網(wǎng)絡(luò),由輸入層、隱含層、輸出層構(gòu)成,層與層之間多采用全部連接方式,同層單元之間不存在相互連接[12]。圖2為BP神經(jīng)網(wǎng)絡(luò)模型圖。其中:x1,x2,…xM為輸入層;y1,y2,…yN為輸出層;wkm為輸入層節(jié)點(diǎn)到隱含層節(jié)點(diǎn)的連接權(quán)值;wnk為隱含層節(jié)點(diǎn)到輸出層節(jié)點(diǎn)的連接權(quán)值;h1(x),h2(x),…,hK(x)為隱含層。
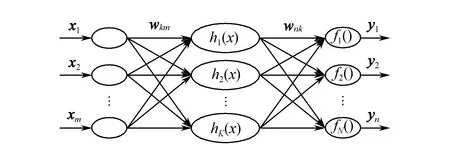
圖2 BP神經(jīng)網(wǎng)絡(luò)模型圖
BP神經(jīng)網(wǎng)絡(luò)算法步驟如下[13-14]:

2)輸入訓(xùn)練樣本X=(x1,x2,…,xm)及相應(yīng)的期望輸出樣本D=(d1,d2,…,dn)。

5)權(quán)值調(diào)整。隱含層與輸出層權(quán)值調(diào)整式為
δnk=(dn-yn)yn(1-yn)。
輸入層與隱含層權(quán)值調(diào)整式為
其中δnk、δkm為梯度向量。
6)輸入下一個(gè)樣本,即p=p+1。
7)當(dāng)E<ε或達(dá)到最大迭代次數(shù)時(shí),停止網(wǎng)絡(luò)學(xué)習(xí),否則將p重置為1,并轉(zhuǎn)入步驟2)。
3 試驗(yàn)結(jié)果分析
3.1 標(biāo)準(zhǔn)Kalman濾波模型的變形預(yù)測結(jié)果
由該大壩的變形資料可知,大壩的動態(tài)性不強(qiáng)、變化緩慢,故選擇常速度模型作為Kalman濾波的狀態(tài)模型,將水平位移的變形加速率視為白噪聲。
標(biāo)準(zhǔn)Kalman濾波模型僅將變形量引入模型的觀測方程中,依據(jù)變形監(jiān)測數(shù)據(jù)取初始狀態(tài)向量
觀測噪聲方差陣Rk=0.5,動態(tài)噪聲方差陣Qk=2。
由前2期監(jiān)測值的平差值求得初始狀態(tài)向量的協(xié)方差陣
依據(jù)標(biāo)準(zhǔn)Kalman濾波模型計(jì)算出模型的擬合值與預(yù)測值,繪出標(biāo)準(zhǔn)Kalman濾波模型的計(jì)算值與原始監(jiān)測數(shù)據(jù)的對比圖及標(biāo)準(zhǔn)Kalman濾波模型的殘差柱狀圖,如圖3、4所示。
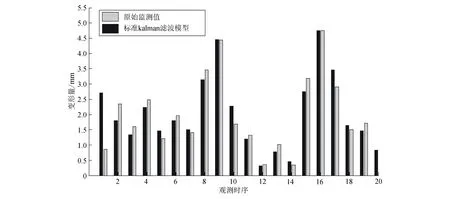
圖3 標(biāo)準(zhǔn)Kalman濾波模型計(jì)算值與實(shí)測值對比圖
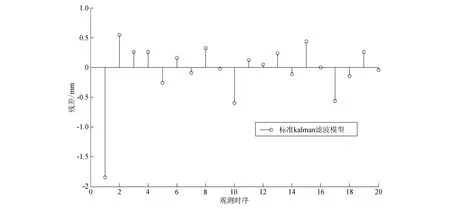
圖4 標(biāo)準(zhǔn)Kalman濾波模型殘差柱狀圖
從圖3、4可看出,該大壩的水平變形具有周期性,且波動較大,標(biāo)準(zhǔn)Kalman濾波模型的預(yù)測曲線能較好地反映大壩的變形趨勢;模型前2期的計(jì)算值與實(shí)測值相差較大,第1期數(shù)據(jù)出現(xiàn)明顯發(fā)散現(xiàn)象,殘差基本在±0.5 mm范圍內(nèi)波動;模型殘差值有正有負(fù),且正負(fù)殘差的比例接近1∶1,表明該模型殘差具有隨機(jī)性。
3.2 顧及多因子Kalman濾波模型的變形預(yù)測結(jié)果

將顧及多因子的Kalman濾波模型的運(yùn)算值同實(shí)測數(shù)據(jù)進(jìn)行對比,結(jié)果如圖5所示,并繪制顧及多因子的Kalman濾波模型的殘差柱狀圖,如圖6所示。
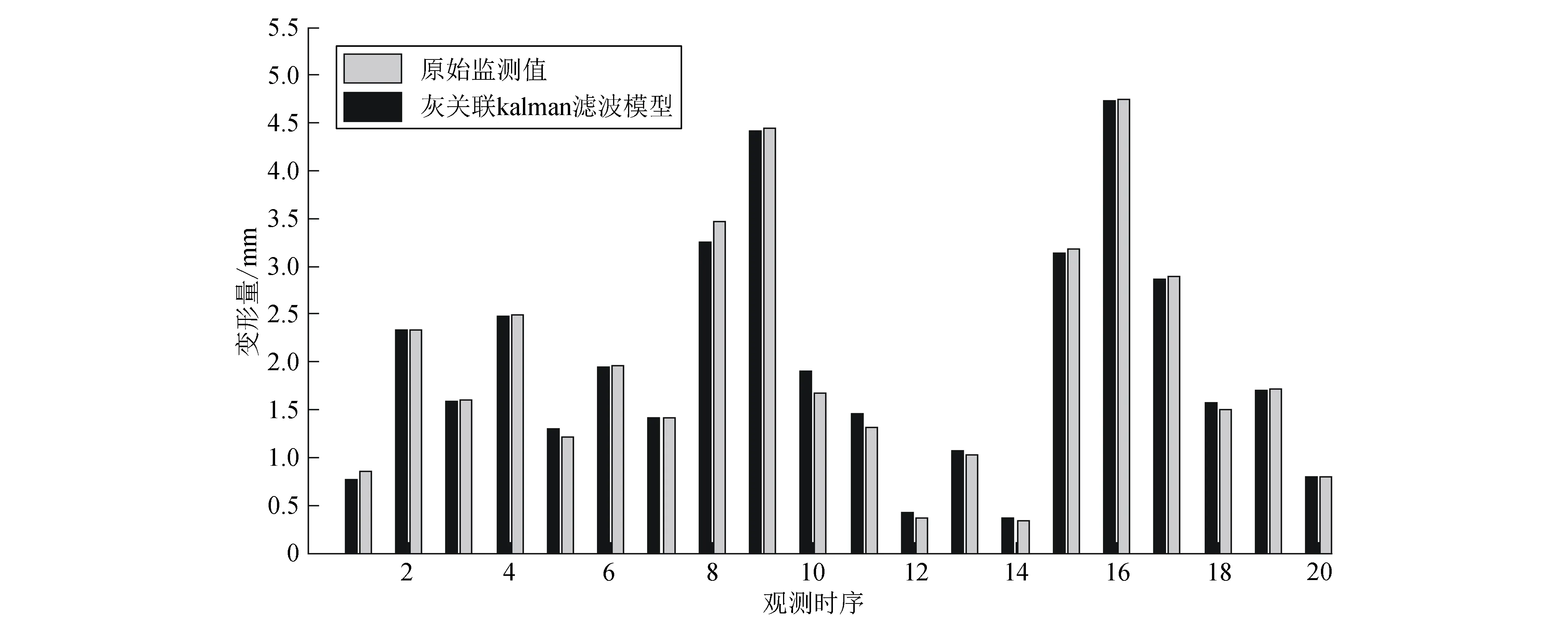
圖5 顧及多因子的Kalman濾波模型計(jì)算值與實(shí)測值對比圖
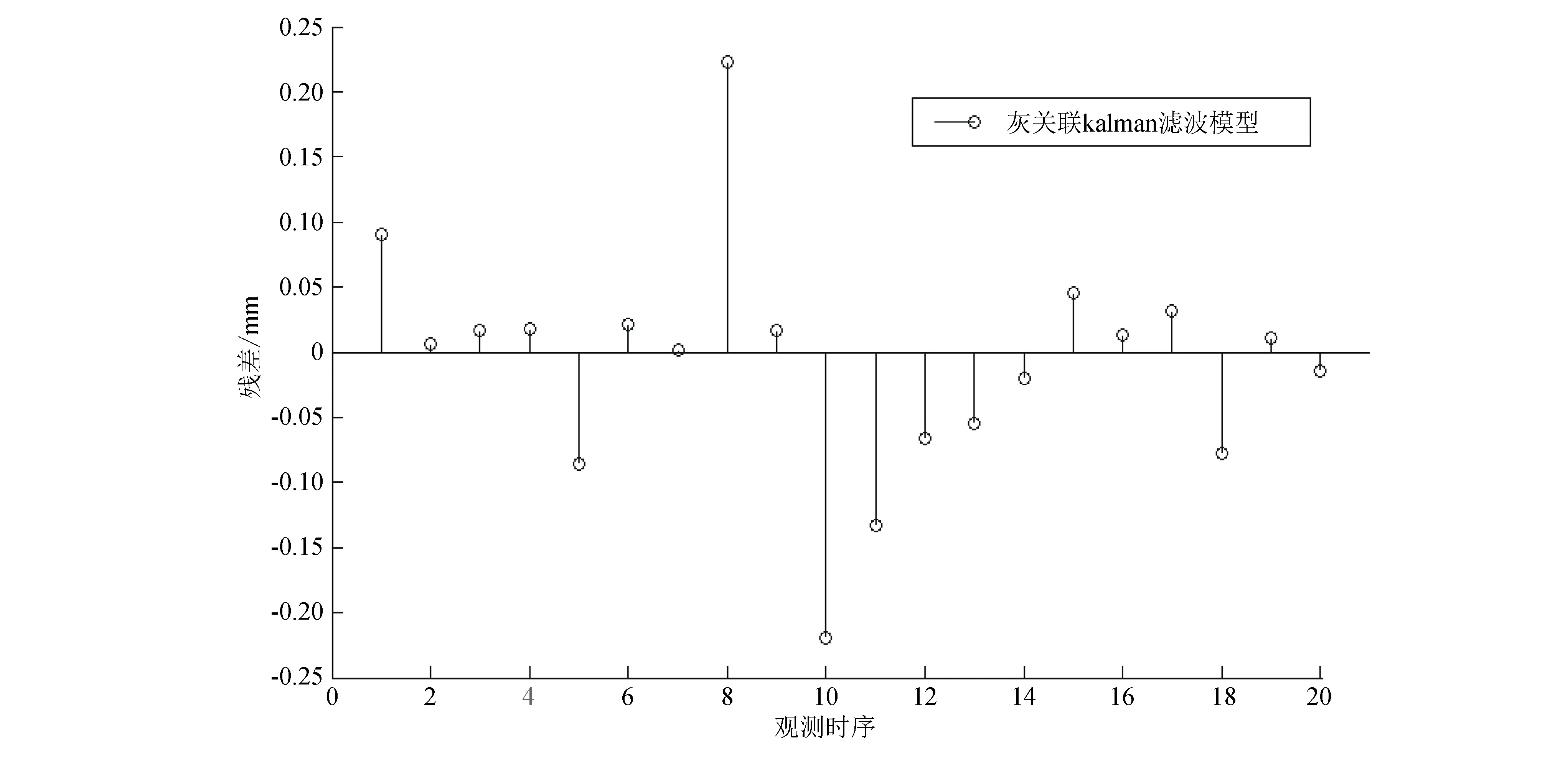
圖6 顧及多因子的Kalman濾波模型殘差柱狀圖
對比圖5、6可知,顧及多因子的Kalman濾波模型的預(yù)測曲線與實(shí)測曲線的變化趨勢非常接近,顧及多因子的Kalman濾波模型的殘差基本在±0.1 mm范圍內(nèi)波動,且模型第1期數(shù)據(jù)未發(fā)散;由于顧及多因子的Kalman濾波模型考慮了水庫水位、氣溫、水頭的影響,并將其作為狀態(tài)向量引入模型中,較好地修正了模型精度,提高了模型的自適應(yīng)性,可以較好地彌補(bǔ)標(biāo)準(zhǔn)Kalman濾波模型擬合與預(yù)測誤差偏大的缺陷。
3.3 BP神經(jīng)網(wǎng)絡(luò)模型變形預(yù)測結(jié)果
在通過BP神經(jīng)網(wǎng)絡(luò)模型進(jìn)行大壩變形分析與預(yù)測時(shí),不同的輸入模式對大壩水平位移量的預(yù)測結(jié)果有一定影響,經(jīng)過多次實(shí)驗(yàn),采用水庫水位、氣溫、水頭作為網(wǎng)絡(luò)的輸入因子,大壩水平變形量作為網(wǎng)絡(luò)的輸出值。將這20期監(jiān)測數(shù)據(jù)分為訓(xùn)練樣本與測試樣本,其中訓(xùn)練樣本數(shù)為17期,測試樣本數(shù)為3期。設(shè)計(jì)程序在建立BP神經(jīng)網(wǎng)絡(luò)模型之前采用mapminmax函數(shù)將網(wǎng)絡(luò)的輸入數(shù)據(jù)進(jìn)行歸一化處理;網(wǎng)絡(luò)采用traingdx函數(shù)作為訓(xùn)練函數(shù),設(shè)定網(wǎng)絡(luò)的學(xué)習(xí)效率為0.01,動量系數(shù)為0.90,預(yù)設(shè)精度為0.01,最高迭代次數(shù)1 000次;根據(jù)確定的影響因子將隱含層神經(jīng)元數(shù)設(shè)為10,構(gòu)建3×10×1的BP神經(jīng)網(wǎng)絡(luò)模型。利用訓(xùn)練好的網(wǎng)絡(luò)模型對大壩水平位移量進(jìn)行預(yù)測。
通過BP神經(jīng)網(wǎng)絡(luò)模型計(jì)算的該大壩水平位移變形擬合值、預(yù)測值與實(shí)際監(jiān)測值的對比情況如圖7所示,模型的殘差如圖8所示。
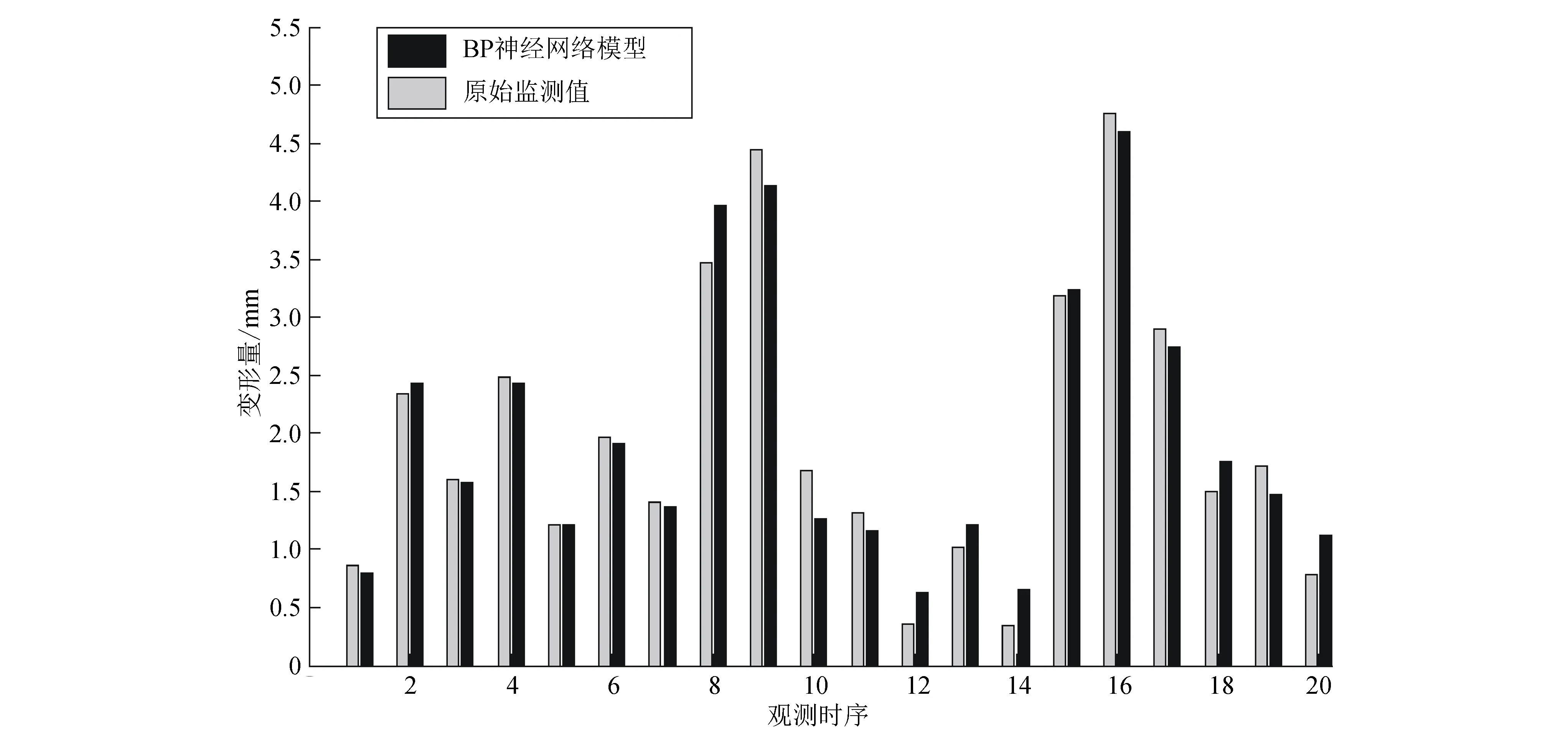
圖7 BP神經(jīng)網(wǎng)絡(luò)模型計(jì)算值與實(shí)測值對比圖
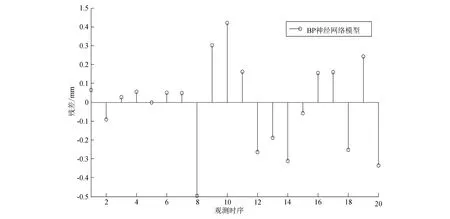
圖8 BP神經(jīng)網(wǎng)絡(luò)模型殘差柱狀圖
3.4 逐步回歸模型變形預(yù)測結(jié)果
利用社會科學(xué)統(tǒng)計(jì)軟件(SPSS statistics 17.0)進(jìn)行數(shù)據(jù)分析,建立顧及多因子影響的逐步回歸模型。在利用SPSS進(jìn)行逐步分析之前,將該大壩的水平位移監(jiān)測值定義為被解釋變量,而水庫水位、氣溫、水頭、時(shí)序定義為解釋變量,設(shè)置逐步回歸分析中解釋變量進(jìn)入或剔除回歸方程的標(biāo)準(zhǔn):進(jìn)入為0.05,剔除為0.10。通過逐步篩選變量建立最優(yōu)逐步回歸模型,模型計(jì)算結(jié)果如圖9、10所示。
利用SPSS計(jì)算模型的檢驗(yàn)統(tǒng)計(jì)量F=62.979、P=0,并繪出標(biāo)準(zhǔn)化殘差的直方圖和概率分布圖,由模型殘差為正態(tài)分布,且F值遠(yuǎn)大于F的檢驗(yàn)臨界值,P=0遠(yuǎn)遠(yuǎn)小于α=0.05,故該模型顯著性較明顯,模型可用,具有實(shí)際意義。
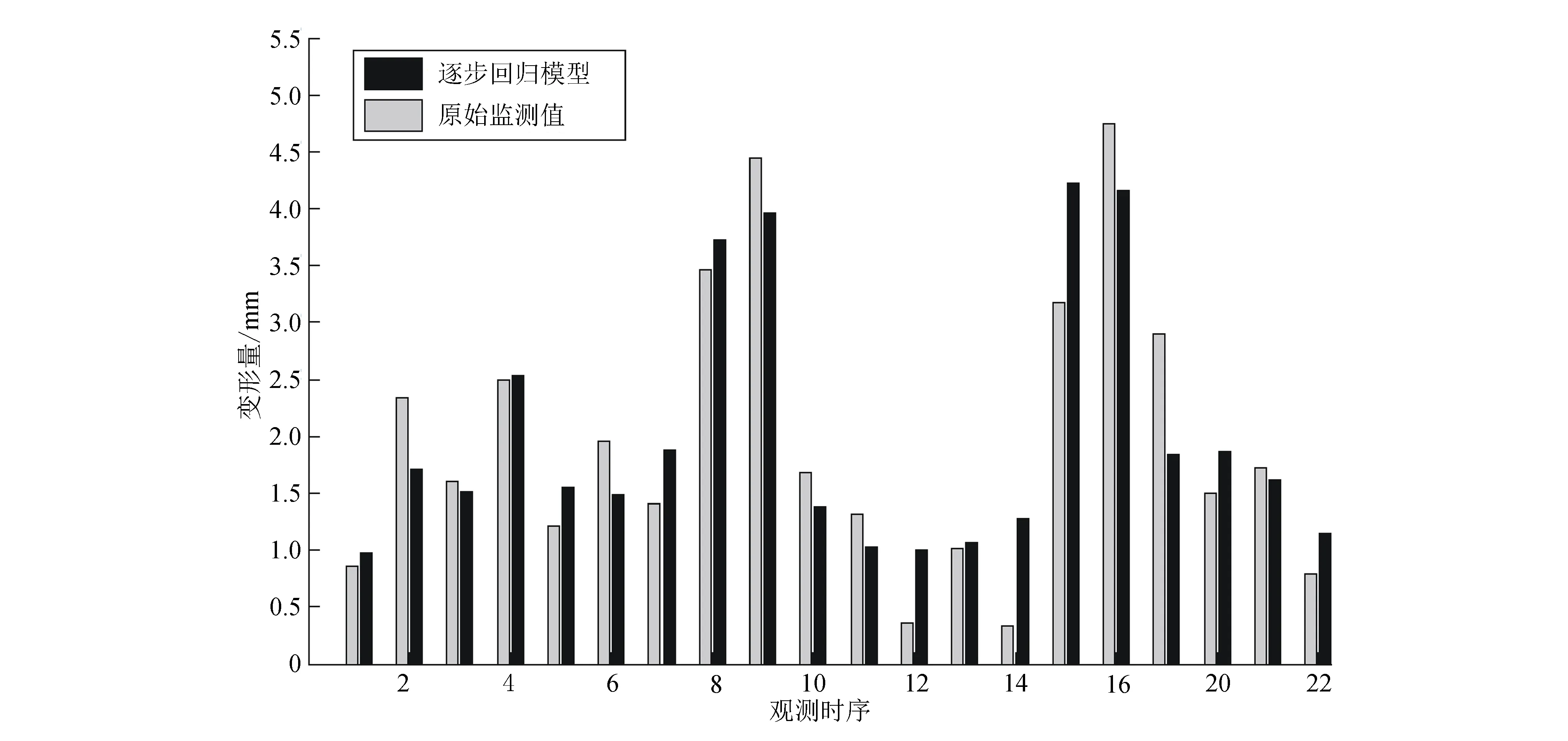
圖9 逐步回歸模型計(jì)算值與實(shí)測值對比圖
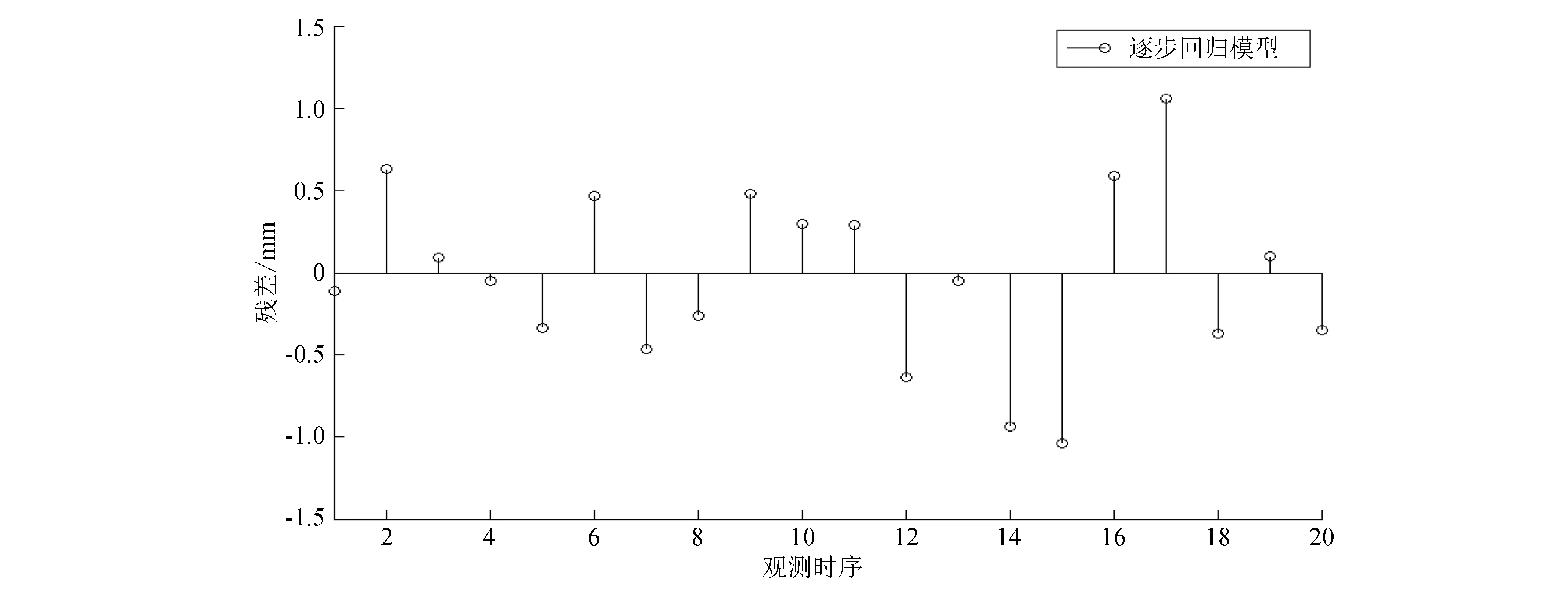
圖10 逐步回歸模型殘差柱狀圖
4 綜合對比分析
將標(biāo)準(zhǔn)Kalman濾波模型設(shè)為模型1,顧及多因子的Kalman濾波模型設(shè)為模型2,BP神經(jīng)網(wǎng)絡(luò)模型設(shè)為模型3,逐步回歸模型設(shè)為模型4。利用后驗(yàn)差檢驗(yàn)法對上述4種模型進(jìn)行精度檢驗(yàn),結(jié)果如表1所示。
表14種模型的精度對比
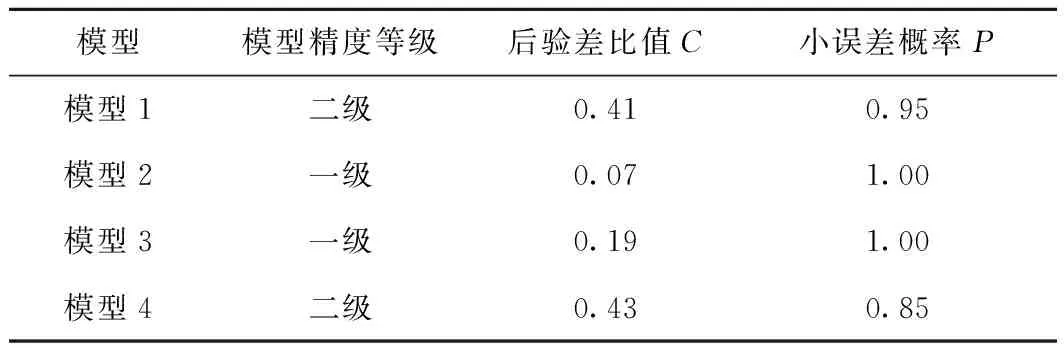
模型模型精度等級后驗(yàn)差比值C小誤差概率P模型1二級0.410.95模型2一級0.071.00模型3一級0.191.00模型4二級0.430.85
對于各個(gè)模型的精度,采用均方誤差、平均絕對誤差及平均絕對相對誤差進(jìn)行誤差分析,結(jié)果如表2所示。
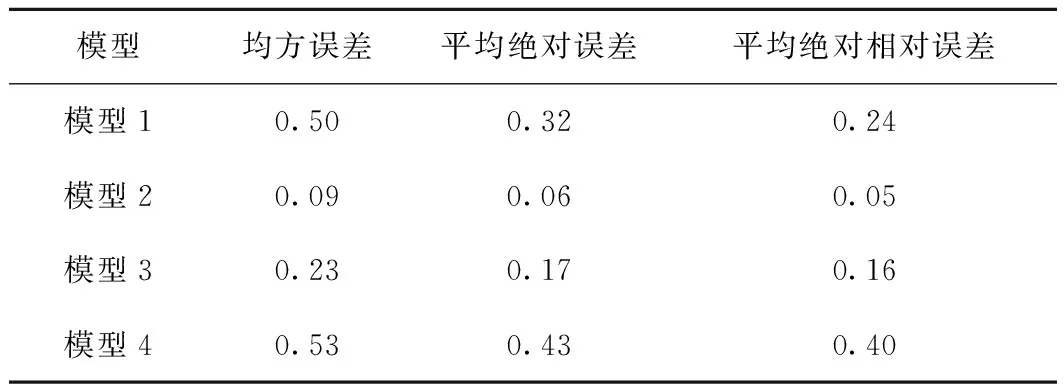
表2 4種模型誤差對比 mm
由以上圖表分析可知,逐步回歸模型的殘差普遍較大,最大殘差為1.05 mm,有6個(gè)殘差超過0.50 mm,模型均方誤差為0.53 mm;標(biāo)準(zhǔn)Kalman濾波模型的殘差較逐步回歸模型普遍稍小,最大殘差為-1.84 mm,有4個(gè)殘差超過0.50 mm,模型均方誤差為0.50 mm;BP神經(jīng)網(wǎng)絡(luò)模型的殘差相對較小,最大殘差為0.50 mm,僅有1個(gè)殘差超過0.50 mm,模型均方誤差為0.23 mm;顧及多因子的Kalman濾波模型的殘差最小,最大殘差僅為0.22 mm,有3個(gè)殘差超過0.10 mm,其余殘差均小于0.10 mm,模型均方誤差為0.09 mm,其余各項(xiàng)精度指標(biāo)均優(yōu)于其他3種模型。4種模型均達(dá)到了較好的擬合與預(yù)測精度,但綜合各項(xiàng)精度指標(biāo),顧及多因子的Kalman濾波模型的擬合精度以及預(yù)測效果最好,該模型全局最優(yōu)。
將4種模型的運(yùn)算值同實(shí)測數(shù)據(jù)進(jìn)行對比,結(jié)果如圖11所示。4種模型的殘差曲線如圖12所示。
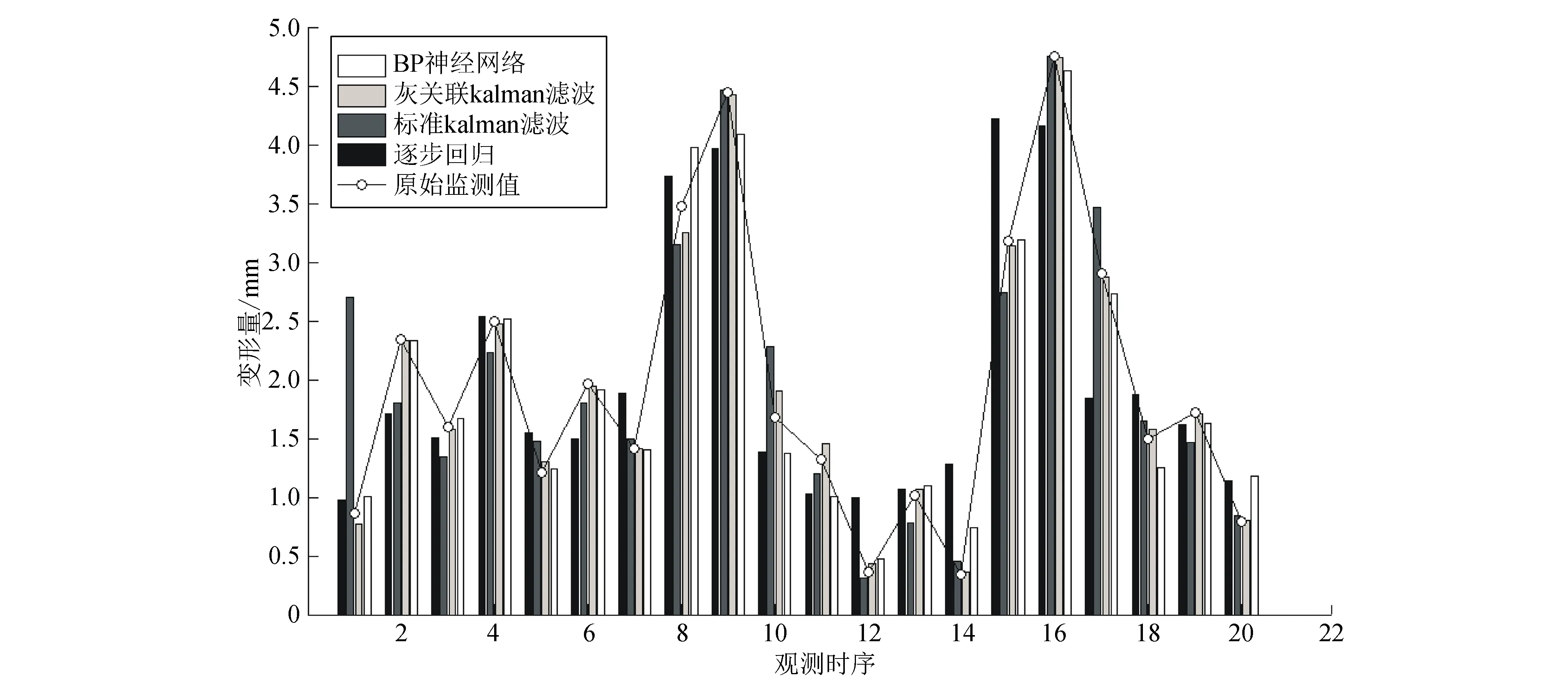
圖11 4種模型結(jié)果對比圖
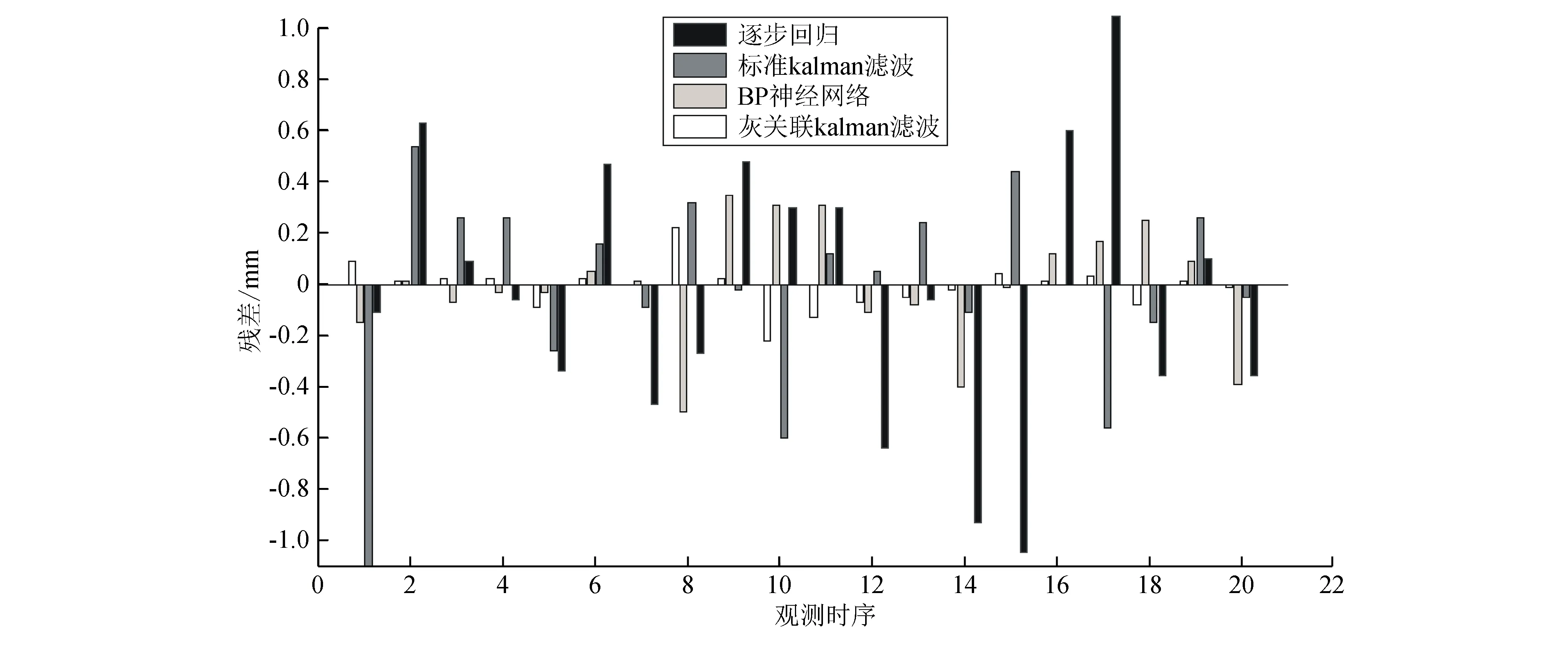
圖12 4種模型殘差曲線對比圖
從圖11可看出,該大壩的水平變形具有周期性,且波動較大,4種模型的預(yù)測曲線均能較好地反映大壩的變形趨勢;逐步回歸模型的預(yù)測曲線與實(shí)測曲線相差較大,顧及多因子的Kalman濾波模型的預(yù)測曲線與實(shí)測曲線的變化趨勢非常接近,該模型不僅考慮了水庫水位、氣溫、水頭的影響,同時(shí)顧及多因子的Kalman濾波模型也是一個(gè)“一步預(yù)報(bào)-修正”的循環(huán)過程,在預(yù)測過程中能較好地修正模型誤差,故其預(yù)測精度較其余3種模型高,且預(yù)測更準(zhǔn)確。由圖11可知,逐步回歸模型與標(biāo)準(zhǔn)Kalman濾波模型的殘差曲線波動較大,顧及多因子的Kalman濾波模型的殘差曲線在零附近幾乎呈一條直線。綜合4種模型的預(yù)測曲線與殘差曲線可知,顧及多因子的Kalman濾波模型的預(yù)測精度最高。
5 結(jié)束語
針對影響變形體變形的因子較多,而標(biāo)準(zhǔn)Kalman濾波在建模分析時(shí)僅考慮單一因子以致模型精度不高的問題,在灰色關(guān)聯(lián)分析與Kalman濾波原理的基礎(chǔ)上建立了顧及多因子影響的顧及多因子的Kalman濾波模型。以某大壩的20期水平位移變形監(jiān)測資料數(shù)據(jù)為例,利用顧及多因子的Kalman濾波模型對大壩進(jìn)行變形分析與預(yù)測,并與標(biāo)準(zhǔn)Kalman濾波模型、BP神經(jīng)網(wǎng)絡(luò)模型、逐步回歸模型進(jìn)行對比,得出以下結(jié)論:
1)顧及多因子的Kalman濾波模型在建模時(shí)將對大壩變形影響較大的因子作為狀態(tài)向量,并引入模型中,一定程度上改善了標(biāo)準(zhǔn)Kalman濾波的遞推算法,提高了模型的自適應(yīng)性與預(yù)測精度;
2)BP神經(jīng)網(wǎng)絡(luò)模型、逐步回歸模型、顧及多因子的Kalman濾波模型均顧及了多因子的影響,但由于顧及多因子的Kalman濾波模型在計(jì)算過程中是一個(gè)“一步預(yù)報(bào)-修正”的遞推過程,模型自適應(yīng)較強(qiáng),可以較好地修正模型誤差,預(yù)測精度也較高。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
小學(xué)生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(2016年12期)2016-12-26 21:37:36
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
