帶隨機擾動的耦合諧振子網絡系統的同步
2019-05-23 11:36:04葉志勇武曉慧韓寶如
重慶理工大學學報(自然科學) 2019年4期
楊 偉,張 華,2,葉志勇,武曉慧,韓寶如
(1.重慶理工大學 理學院, 重慶 400054; 2.銅仁學院 大數據學院, 貴州 銅仁 554300;3.重慶醫科大學 醫學信息學院, 重慶 400016)
自然界中有很多生物群體會自發呈現出規律一致性的運動現象,例如:魚群能快速一致地改變隊形來應對獵物的追捕,螢火蟲能節奏一致地進行閃爍,螞蟻遵循一些簡單的規則就能進行覓食等復雜群集動力學同步行為[1]。在過去幾十年中,復雜網絡系統的同步一致性研究受到了該領域眾多國內外學者的廣泛關注,得到了很多重要的研究成果[2-8]。一般來講,同步是指含有兩個或兩個以上子系統的網絡在一定時間內,其運動狀態趨于一致的動力學行為[4],主要有有限時間同步[5]、幾乎處處同步[6],分群同步或時間無窮大時同步[7-8]等。
在復雜動力網絡系統的同步研究中,子系統為諧振子的一類二階多智能體網絡系統的同步問題,在過去10年中一直是國際上的一個研究熱點,國內外學者在多種約束條件下給出了許多重要的控制輸入協議[9-14]。例如,Ren W首次在有向網絡拓撲結構下建立了基于局部耦合的時間連續型諧振子網絡系統的模型,給出了該連續型耦合諧振子網絡系統的同步態以及達到同步的判定條件[10]。隨后,Ballard等針對時間離散型諧振子網絡系統進行建模并設計了一個簡單的分布式控制輸入算法,并研究將該模型應用于機器人的同步協調運動問題,利用離散時間分布耦合諧振子設計了對稱編隊的控制策略,給出了網絡化移動機器人協調運動的物理實驗[11]。
最近,Zhang等[12-13]在系統無法感知振子之間的相對速度狀態而只能在一系列離散時刻獲得相對位移狀態的約束條件下,提出了基于相對位移采樣信息的兩種分布式控制輸入協議:脈沖控制協議和采樣控制協議。分別在無向固定拓撲結構、無循環劃分的分簇拓撲結構下,給出了系統達到同步的一些充分必要條件,得到了系統在達到同步時采樣周期與系統的自身參數以及拓撲結構之間的準確函數關系。隨后,Wan等[14]在基于離散時刻相對速度的耦合情形下,分析了網絡型諧振子系統的分群同步現象并給出了諧振子網絡系統達到同步的一些判定準則。
值得注意的是以上幾乎所有的工作都是建立在非隨機耦合的諧振子系統上的。但是,在現實世界中由于測量噪聲的不可避免性,系統均不同程度地受到各種噪聲的干擾。因此,在隨機噪聲環境下研究耦合諧振子網絡系統的同步問題具有重要的實際意義。例如,Shang等[15]基于隨機時滯微分方程的穩定性理論、代數圖論和矩陣論研究了帶有隨機噪聲和時滯的耦合諧振子系統的領導—跟隨同步線性。Sun等[16]在無引導者的結構下,研究了隨機噪聲作用下耦合諧振子系統的同步,設計了兩種分布式控制算法,得到了使耦合諧振子系統達到幾乎處處同步的充分條件。但是,他們考慮的隨機諧振子系統的漂移項和擴散項都是基于相對速度的耦合設計。
基于以上研究工作,考慮到實際工程中獲知相對速度信息比相對位移信息更加困難這一現實,設計了一種由帶有隨機噪聲的相對位移信息構成的分布式控制輸入協議,并且得到了該網絡系統達到幾乎處處同步的一個充分條件。
1 基礎知識和模型建立
1.1 符號說明
1.2 代數圖論
代數圖論是分析網絡問題的重要基礎。令G=(V,E,A)是一個n(n≥2)階加權有向圖,V={1,2,…,n}是有向圖G的節點集合,Ni={j∈V∶(i,j)∈E}表示節點i的鄰居集合,E?V×V是有向邊界集,A=[aij]∈Rn×n是鄰接矩陣。(i,j)∈E當且僅當aij>0(i≠j),即節點i能夠從節點j收到信息,(i,j)?E當且僅當aij=0(i≠j),即節點i不能夠從節點j收到信息。


1.3 模型描述
耦合諧振子網絡系統一般動力學方程為[18]:
(1)
其中:xi(t),vi(t)∈R分別表示第i個振子的位移和速度;α>0表示位移增益;ui(t)是分布式控制輸入協議。
Sun等[16]提出了如下帶有隨機擾動的分布式控制協議:
(2)
其中:c>0表示耦合強度;aij表示振子i和振子j的相互作用。
值得注意的是,該協議中的控制輸入項是由相對速度狀態信息構成的,但是在現實中由于技術條件的限制,準確地測量相對速度要比測量相對位移困難。因此,本文給出如下基于帶隨機擾動相對位移狀態的分布式控制輸入協議:
(3)
其中:δ是噪聲強度;B(t)是一個定義在完備概率空間(Ω,F,P)上的一維布朗運動,滿足如下條件:E[dB(t)]=0,[dB(t)]2=dt。
研究目標是構建帶有分布式控制算法(3)的耦合諧振子網絡系統(1)達到幾乎處處同步的充分條件。首先介紹如下著名的伊藤(It)公式。考慮一個n維隨機微分方程
dx(t)=f(t,x(t))dt+g(t,x(t))dB(t)
(4)
其中,t≥0,x(t)∈Rn是狀態向量,B(t)是一個m維獨立標準的維納過程,向量值函數f:[0,+∞]×Rn→Rn,g:[0,+∞]×Rn→Rn×m,并且f(t,0)=0,g(t,0)=0。
假設C2,1(Rn×R+;R)表示非負函數V(x,t)在Rn×R+上關于x二階可導,關于t一階可導。對于每一個V∈C2,1(Rn×R+;R),定義從Rn×R+到R的極小生成元lV[19]
lV=Vt(x,t)+Vx(x,t)f(x,t)+
(5)
其中
為了證明主要結果,引入以下定義和引理。
定義1圖G=(V,E,A)的節點i是平衡的當且僅當節點i的入度和出度相等,即degin(i)=degout(i)。有向圖G是平衡的當且僅當它的所有節點均是平衡的。

degout(i)=Dii

(6)
2 主要結果
在分布式控制協議(3)下,網絡型耦合諧振子系統(1)動力學方程寫成矩陣的形式:
(7)



(8)


(9)
再令
那么方程(9)能寫成以下形式:
de(t)=He(t)dt-δEe(t)dB(t)
(10)

(11)
證明首先構造一個正定的Lyapunov函數V(t)=eT(t)e(t)。通過伊藤(It)公式,能夠計算極小生成元
lV=2eT(t)He(t)+
2eT(t)He(t)+δ2trace(eT(t)ETEe(t))=

eT(t)Me(t)
矩陣M的特征方程是
即
(12)
要使得該特征方程的所有特征值為負數,則需滿足
即
則對于所有的l=2,3,…,n,有
(13)
由于0=λ1<λ2≤…≤λn,那么只要
則矩陣M的所有特征值是負的。假設-λmin(M)是矩陣M的最大特征值,則
lV≤-λmin(M)eT(t)e(t)=-λmin(M)V(t)
(14)

3 實驗仿真
考慮由6個諧振子構成的網絡系統,其網絡拓撲結構以及邊的權重如圖1所示。
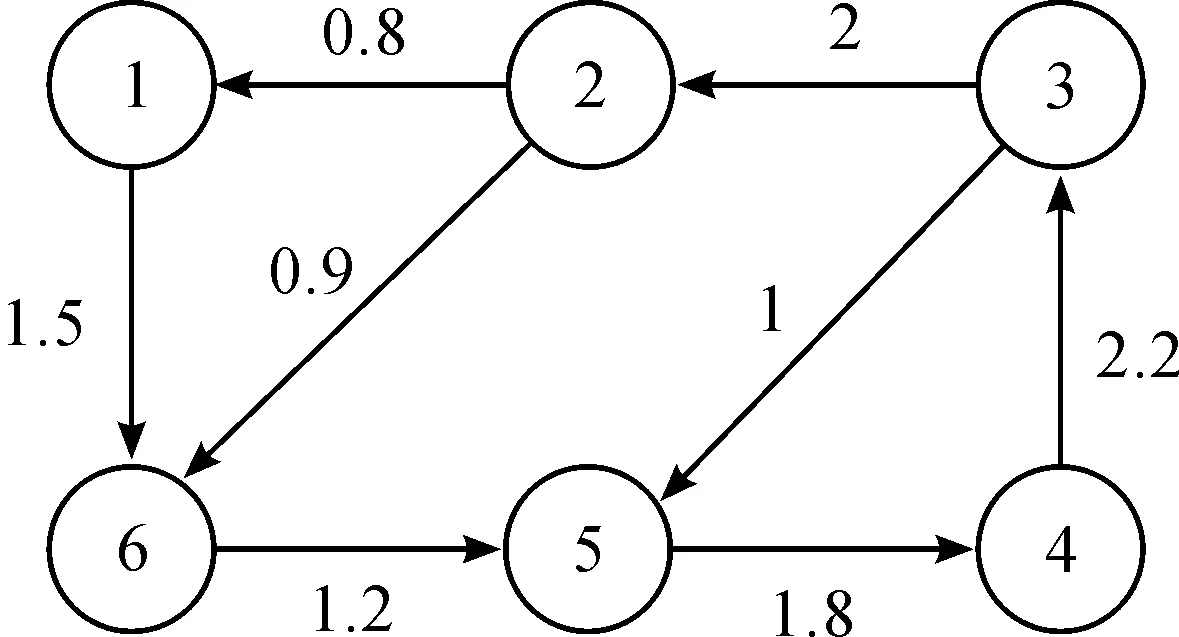
圖1 系統網絡拓撲結構
其對應的拉普拉斯矩陣為
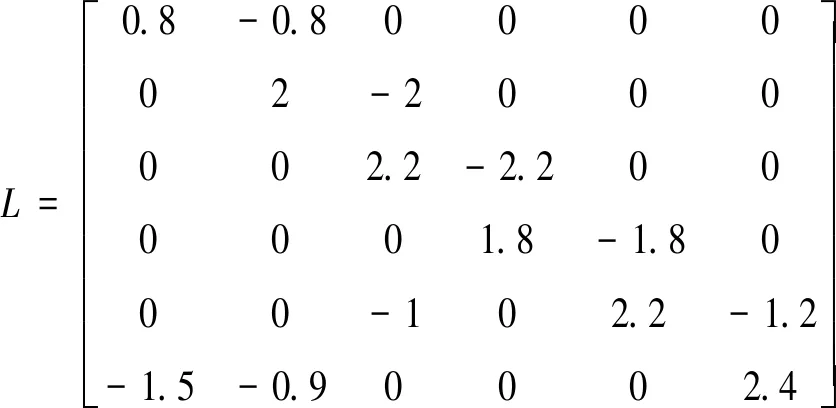
根據定理1,如果7.737 2δ2<16<27.029 6+7.737 2δ2,即δ2<2.067 9,那么帶隨機擾動的網絡型耦合諧振子系統(7)能夠達到幾乎處處同步。取δ=0.8,選擇初始值為x1(0)=11,x2(0)=1,x3(0)=22,x4(0)=-5,x5(0)=-13,x6(0)=5,v1(0)=4,v2(0)=13,v3(0)=-15,v4(0)=2,v5(0)=-5,v6(0)=18。圖2展示了系統隨著時間的演化,位移xi(i=1,2,…,6)的變化曲線。圖3展示了隨著時間的演化,速度vi(i=1,2,…,6)的變化曲線。可以看出:隨著時間的演化,各個節點的位移和速度均能夠達到幾乎處處同步。

圖2 位移狀態時間反應曲線
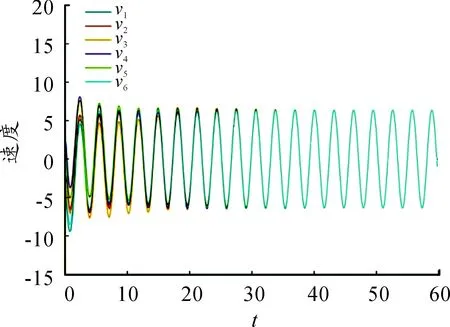
圖3 速度狀態的時間反應曲線
4 結束語
本文研究了在隨機噪聲擾動環境下網絡型諧振子系統的幾乎處處同步的問題。因實際操作中準確地直接測量振子的相對速度難于相對位置信息,因而設計了一種用準確的相對速度耦合信息和帶隨機噪聲的相對位移耦合信息兩部分構成的分布式控制輸入協議。利用伊藤(It)公式以及拉普拉斯矩陣的譜理論,給出了隨機耦合諧振子網絡系統達到幾乎處處同步的充分條件。數值模擬進一步驗證了所提出結果的正確性和協議的有效性。在后續的研究計劃中,我們將探索只含有相對位移耦合的隨機耦合諧振子網絡系統達到同步穩定的判定條件,以及帶有通訊和輸入時滯、噪聲強度是如何影響隨機耦合諧振子系統同步的機理等。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32