基于模式識別的離合器動作數據分割方法
2019-05-23 06:16:38劉義樂張進秋
裝甲兵工程學院學報 2019年1期
劉義樂, 張進秋
(陸軍裝甲兵學院車輛工程系, 北京 100072)
時間序列指一串按時間先后順序有序排列的觀測值[1],具有數據點多(往往達到億級)、數據鏈長和冗余點多的特點,只有在某個時間段,這些數據才會按照某種規律變化而具備分析意義。為了找到并表示這些有意義的片段,人們提出了利用不同模式來分段表示時間序列的各種方法,如頻域表示法、符號表示法和分段直線表示法等[2]。
坦克駕駛訓練過程中所產生的動作數據是一種典型的時間序列,不僅數據點多、數據鏈長、冗余點多,且具有穩定的數值特征和固定時序組合,因此應采用分段方法來表示數據中所包含的不同動作及其相互間的時間關系,但需要結合這些動作的數值特點和教范要求來定義完備的動作模式,明確各動作模式的數據特征。基于此,筆者按照模式識別的思路來分割駕駛動作數據,識別各種動作模式,以達到對駕駛動作進行精細化分析的目的。
1 時間序列分割定義
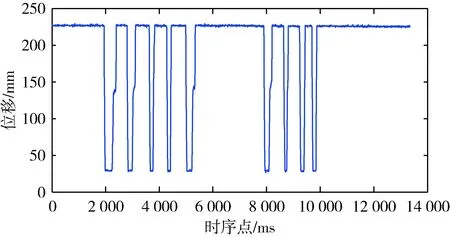
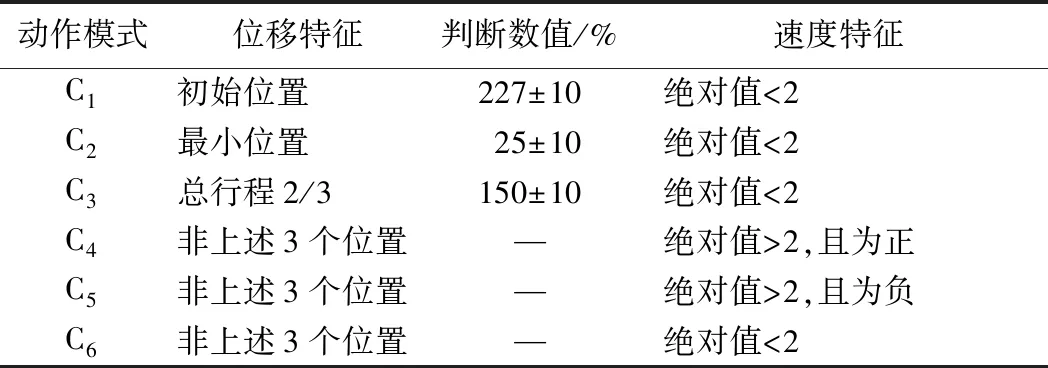
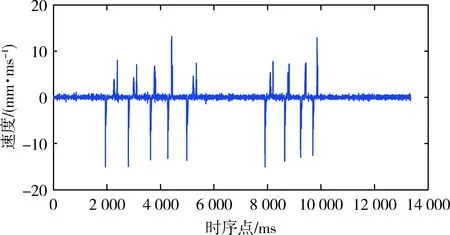
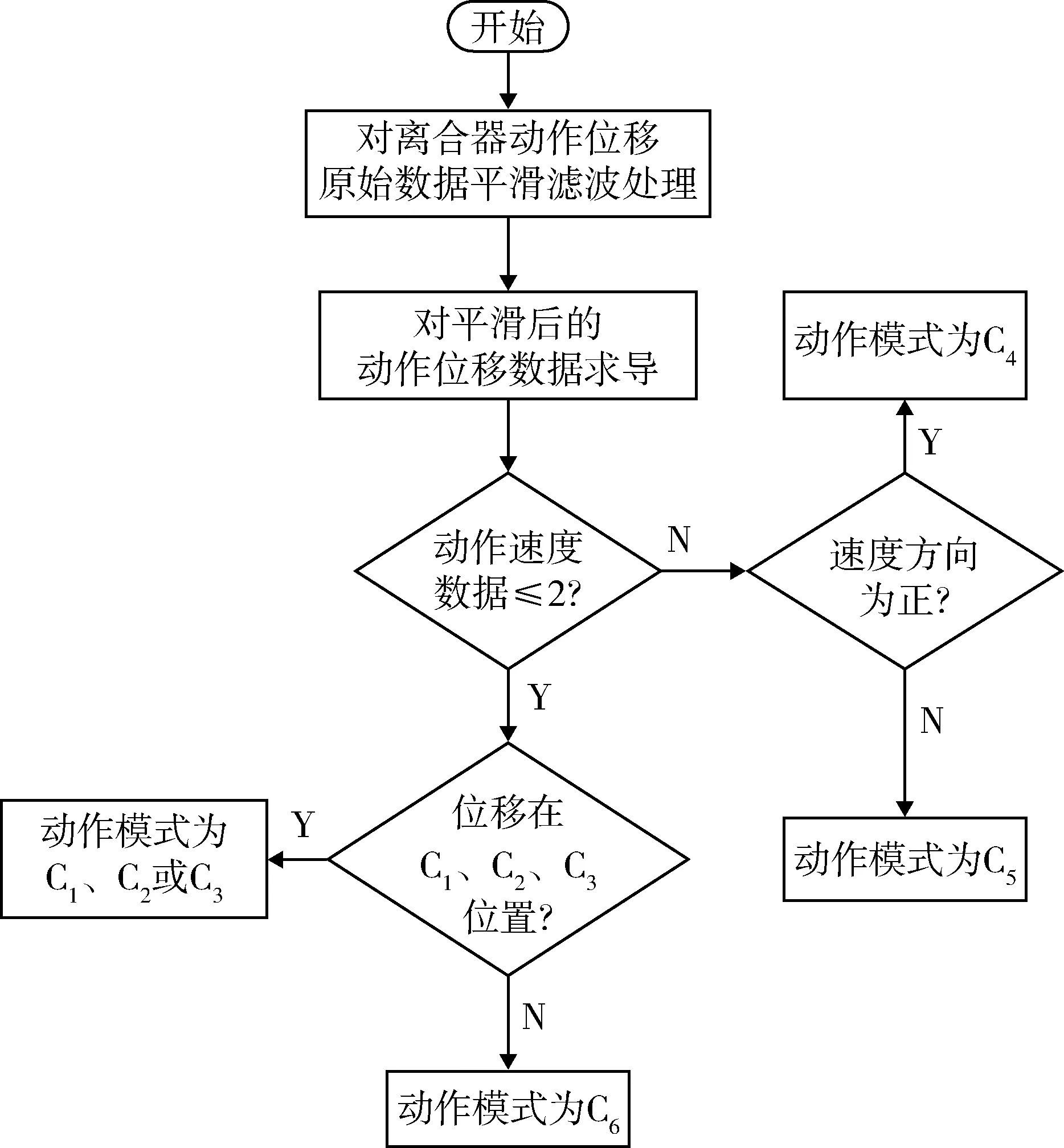
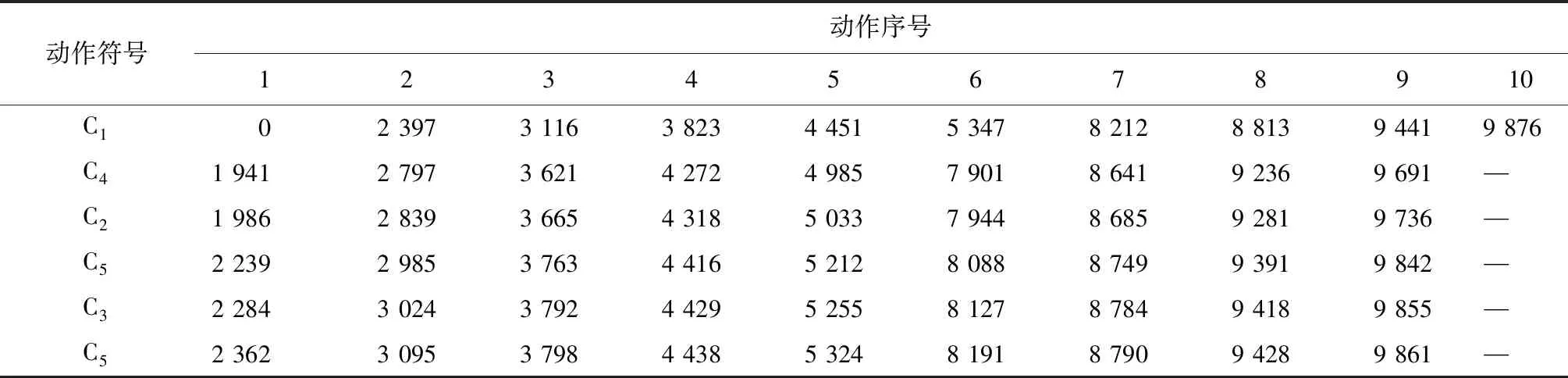
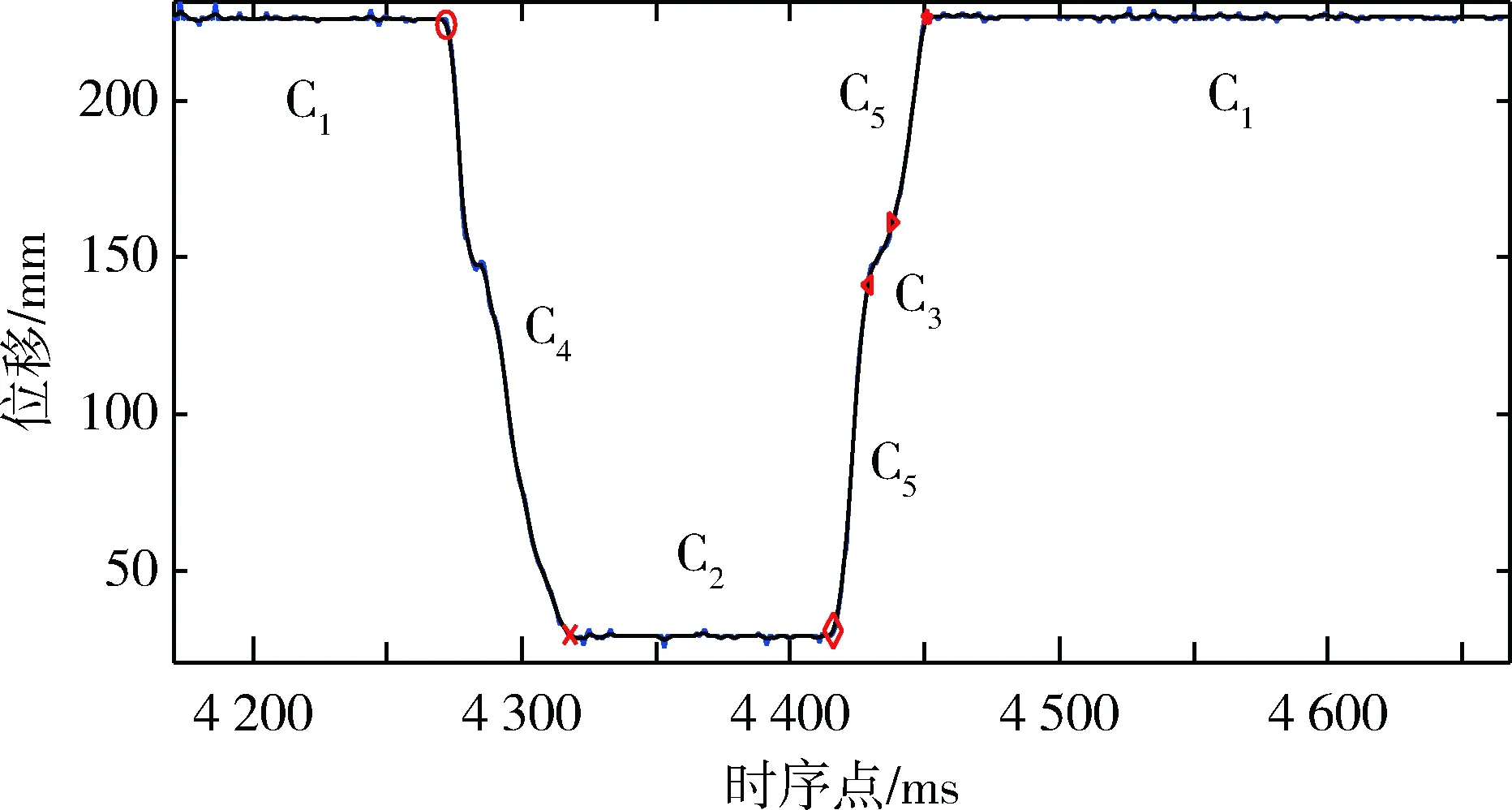
設時間序列為X=(x1,x2,…,xn),將其分為k+1(k< (1) 也可表示為 式中:ta1,ta2,…,tak表示分割點所對應的時刻;wi為[ta(i-1),tai]之間的模式;fi(t,wi)表示連接模式wi兩端點的函數;ei(t)為一段時間內時間序列與它的模式之間的誤差。這種把時間序列分割后用模式表示的過程,稱為序列分割或者數據壓縮[3]。常見的時間序列分割方法包括重要點分割法[4]、滑動窗口分割法[5]等。 駕駛動作數據分割的目的在于,判定當前數據中包含了哪些駕駛動作,明確各動作的起始時間。其中:駕駛動作可通過模式識別的方法實現,對應時間序列分割定義中的fi(t,wi)模式函數;各動作起始時間,對應時間序列分割定義中各子序列模式起始點t1,ta1,ta2,…,tak。 離合器動作數據是指駕駛訓練過程中所產生的離合器踏板位移數據。圖1為任意截取的一段離合器動作位移曲線,屬于一種典型的時間序列。 圖1 離合器動作位移曲線 按照訓練效果分析需求,離合器動作模式可分為單一動作模式和組合動作模式。單一動作模式是指單一動作件的一次運動狀態改變,結合駕駛動作實踐和離合器動作位移曲線,可知:常見的離合器動作共有6種動作模式,即原始位置C1、分離位置C2、半聯動位置C3、踩離合C4、松離合C5、錯誤動作C6。 離合器單一動作模式識別的目的,是通過對離合器動作位移數據的處理識別出離合器上述6種動作模式。從離合器動作實踐和離合器動作位移數據曲線形狀來看,這6種動作模式的區分主要依賴2類特征:一是位移特征,3個位置均有相對穩定且明確的位移范圍;二是運動速度特征(包括運動方向),當處于松離合或踩離合2種運動狀態時,運動速度不能為0且運動方向相反。因此,可以根據位移和速度這2類特征來完成離合器6種動作模式的識別。識別規則如表1所示。 表1 離合器動作模式識別規則 從離合器動作數值特點看,即使經過平滑預處理,其踏板的原始位置C1、分離位置C2和半聯動位置C3也會受機械結構(如回位彈簧疲勞、連桿變形、連接件磨損、松動等)影響而發生一定程度的偏離。為了彌補這一缺陷,設定離合器踏板3個位置模式的參考值的偏差范圍為±10%。 離合器動作的速度特征由位移曲線求導得到。對某車輛離合器13 344組位移數據進行求導,得到速度分布如圖2所示。可以看出:1) 當離合器處于靜止狀態時,仍會存在大量速度<2 mm/ms的毛刺,即信號采集的噪聲;2) 當踩踏或松開離合器時,踏板的運動速度>>2 mm/ms,而在極端情況下的踩踏或松開速度可達10 mm/ms以上。基于這一判定,把離合器運動和靜止的速度區分閾值設置為2 mm/ms,將圖1、2中的橫坐標點逐一比較,可以看出:只要閾值設置合理,離合器各運動速度的突變點與運動狀態轉換點是一一對應的。 圖2 離合器動作速度分布 在建立各動作模式識別特征和閾值的基礎上,按圖3所示流程編程,對離合器動作的每點進行模式識別,把離合器原始位移序列轉變為離合器動作模式序列。在很多時間序列處理技術中,也將這一步工作稱作時間序列符號化表示[6]。 圖3 離合器動作模式識別流程 離合器動作數據分割的目的為明確各動作模式的起止時間。前文根據速度特征和位移特征對離合器每一個位移點進行了模式識別和符號化表示,但離合器動作數據的長度未產生變化,仍存在冗余數據多、求解時間長的問題。 借鑒時間序列的滑動窗口分割法,以相鄰2個模式符號為窗口寬度進行比較:若動作模式Cp相同,則繼續比較;否則,記為分割點,輸出該點的動作模式和時間序列索引號q(q=1,2,…,N),從而完成離合器動作數據的分割[7]。分割算法偽代碼如下: 算法名稱:時間序列的滑動窗口分割法。 算法輸入:離合器動作模式識別結果時間序列C={Cpq∈Cp,p=1,2,…,6,q=1,2,…,N}。 輸出:分割點序列IP。 算法步驟: 1)cp→IP[1],index =2;∥將序列第1個點作為第1個重要點; 2) forp=2 toN-1 do; 3) begin; 4) Ifcp+1≠cp; 5) thencp+1→IP(index),index + +;∥將序列點cp加入IP 中; 6) end。 由算法步驟可以看出:該方法只需對離合器動作模式序列進行一次掃描,就可以得到分割點序列,其時間復雜度為O(N)。 選擇一組離合器動作數據,共計包括13 344個位移點,采用上述離合器動作模式識別和序列分割的方法對該數據序列進行處理,其各動作模式識別和分割的起始時間點如表2所示。對表2中某一次離合器動作曲線放大,得到的分割點與動作模式轉折點的對應關系如圖4所示。可以看出:各分割點的確定與動作模式轉換點基本吻合,說明所采用的模式識別和數據分割方法適用于離合器動作分析。 表2 離合器動作數據分割點 圖4 離合器動作曲線分割點與動作模式轉折點的對應關系 將時間序列進行分割,轉變為符號化表示形式,是降低時間序列數據處理難度的有效方法。筆者提出的基于模式識別和滑動窗口相結合的離合器動作數據分割方法,既考慮了離合器單一動作模式的識別和符號化表示,也考慮了不同動作模式之間的分割點識別,計算比較簡單,易于實現,且識別和分割結果能夠完整反映離合器動作數據的動作特征,對后續各類動作數據處理和訓練效果有重要意義。2 離合器動作模式識別
2.1 離合器動作數據
2.2 離合器單一動作模式定義
2.3 離合器動作模式識別規則
2.4 模式識別閾值設置
3 離合器動作數據分割
3.1 滑動窗口分割算法
3.2 離合器動作數據分割示例
4 結論
猜你喜歡
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
電子測試(2017年23期)2017-04-04 05:06:50
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
智能系統學報(2017年5期)2017-01-22 11:21:30
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
智能系統學報(2015年3期)2015-01-29 15:20:12
