基于電驅(qū)動(dòng)的地面無人裝備機(jī)動(dòng)技術(shù)發(fā)展研究
2019-05-23 06:36:34紀(jì)伯公
裝甲兵工程學(xué)院學(xué)報(bào) 2019年1期
袁 東, 紀(jì)伯公, 張 杰
(1. 陸軍裝甲兵學(xué)院兵器與控制系, 北京 100072; 2. 陸軍裝甲兵學(xué)院科研學(xué)術(shù)處, 北京 100072)
隨著軍事科技的迅猛發(fā)展和軍事變革的持續(xù)推進(jìn),陸基裝備逐步向信息化、智能化、無人化方向發(fā)展,地面無人裝備成為未來陸戰(zhàn)場(chǎng)的戰(zhàn)略前沿和發(fā)展熱點(diǎn)[1-4]。與有人裝備相比,地面無人裝備在執(zhí)行高危險(xiǎn)、高重復(fù)、超越人體生理極限的任務(wù)等方面具有獨(dú)特優(yōu)勢(shì):在時(shí)域上,能夠長時(shí)間(從以小時(shí)計(jì)算,到以天、月,甚至以年為任務(wù)周期)、高強(qiáng)度、持久高效地執(zhí)行各種作戰(zhàn)和勤務(wù)保障任務(wù);在地域上,能夠到達(dá)和適應(yīng)傳統(tǒng)裝備或人員難以到達(dá)和適應(yīng)的復(fù)雜地形(如陡崖、窄縫、洞穴等)、危險(xiǎn)區(qū)域(如雷場(chǎng)、生化污染地帶等)和極端氣象環(huán)境(如極寒、高海拔地域等)。同時(shí),地面無人裝備不受有人裝備乘員的心理極限因素影響,在任何情況下都能“一往無前、毫不畏懼”地堅(jiān)決執(zhí)行任務(wù),并能減少人員傷亡。因此各軍事強(qiáng)國都在不斷加大地面無人裝備的研發(fā)力度和運(yùn)用實(shí)踐。目前,地面無人裝備已在偵察感知、指揮控制、機(jī)動(dòng)突擊、火力打擊、后勤保障和核生化探測(cè)等諸多戰(zhàn)術(shù)行動(dòng)中發(fā)揮著重要作用,特別是經(jīng)過近幾次局部戰(zhàn)爭(zhēng)的實(shí)戰(zhàn)運(yùn)用,其作戰(zhàn)效能和獨(dú)特優(yōu)勢(shì)已引起高度關(guān)注。
隨著地面無人裝備使命任務(wù)的不斷拓展和功能的多樣化,其機(jī)動(dòng)能力要求也在不斷提高。機(jī)動(dòng)平臺(tái)是無人裝備任務(wù)載荷的承載者,也是實(shí)現(xiàn)達(dá)成作戰(zhàn)任務(wù)的基礎(chǔ)[5]。如何快速、隱蔽、準(zhǔn)確地到達(dá)各種復(fù)雜地域,并能夠根據(jù)使命任務(wù)要求完成相應(yīng)的戰(zhàn)術(shù)機(jī)動(dòng)動(dòng)作,是地面無人裝備機(jī)動(dòng)技術(shù)研究的核心問題。筆者從地面無人裝備機(jī)動(dòng)性能需求出發(fā),探討采用電驅(qū)動(dòng)實(shí)現(xiàn)無人裝備機(jī)動(dòng)的技術(shù)特點(diǎn)與主要研究?jī)?nèi)容,為進(jìn)一步提高其機(jī)動(dòng)性能提供參考。
1 地面無人裝備機(jī)動(dòng)性能需求
1.1 地面無人裝備發(fā)展概況
20世紀(jì)30年代,前蘇聯(lián)開始了無線遙控坦克的研發(fā)[3],在二次世界大戰(zhàn)期間德軍也研發(fā)出了無線遙控履帶車輛,這些早期的地面無人裝備由于受環(huán)境感知、運(yùn)動(dòng)規(guī)劃、跟蹤控制等相關(guān)技術(shù)的限制,均采用遙控方式。20世紀(jì)80年代以來,美、英、法、德、俄、日、韓等國相繼啟動(dòng)了多項(xiàng)研究計(jì)劃,開展了地面無人裝備的關(guān)鍵技術(shù)與作戰(zhàn)運(yùn)用研究,并取得了大量研究成果。
總體來看,在自主化程度方面,逐步由遙控型向半自主、自主型發(fā)展[1,6]。其中:遙控型地面無人裝備技術(shù)較為成熟并大量列裝,如美國的Recon Scout Magnetic無人車、“帕克博特”(Packbot)系列無人車、“魔爪”(Talon)系列無人車、“安德羅斯”(Andros)無人車、“粉碎者”(Crusher)無人車等,德國的“清道夫”2000掃雷車、TelMAX排爆機(jī)器人、tEODor無人車,英國的“獨(dú)眼巨人”(Cyclops)系列無人車、“手推車”(Wheelbarrow)系列、Armtrac400掃雷無人車,法國的Cameleon無人車、TSR202無人車、AMX-30B/B2 DT掃雷無人車,以色列的VIPeR無人車,俄羅斯的“天王星-9”(Uran-9)無人車、“平臺(tái)-M”(Platform-M)無人車等;半自主型地面無人裝備也取得了突破性進(jìn)展,并有部分列裝,如美國的班級(jí)任務(wù)保障系統(tǒng)(Squad Mission Support System,SMSS)、以色列的“先鋒”(AvantGuard)無人車等,還有多個(gè)項(xiàng)目正處于研發(fā)階段;自主型地面無人裝備研發(fā)項(xiàng)目也不斷啟動(dòng),如美國的自主平臺(tái)演示樣車(Autonomous Platform Demonstration,APD)、越野機(jī)器人感知技術(shù)演示項(xiàng)目,法國的自主式快速運(yùn)動(dòng)偵察車等。
在功能集成方面,由單一功能向多功能綜合化發(fā)展。早期的地面無人裝備大多是單一功能的專用裝備,如無人偵察裝備、無人掃雷車或者無人運(yùn)輸車。隨著戰(zhàn)場(chǎng)需求的不斷變化,要求地面無人裝備功能要逐漸向綜合一體化邁進(jìn),從而使其具有多種用途,一臺(tái)裝備往往能夠同時(shí)擁有偵察、打擊、指揮、控制甚至保障方面的多重能力,且逐步呈現(xiàn)出“通用機(jī)動(dòng)平臺(tái)+專用任務(wù)載荷”的系列化發(fā)展趨勢(shì)。
從實(shí)戰(zhàn)運(yùn)用方式來看,地面無人裝備逐步由支援保障功能向作戰(zhàn)功能拓展[7]。在科索沃作戰(zhàn)中主要用于掃雷任務(wù),如“黑豹”(Panther)系統(tǒng)、Mini-Flail掃雷裝置;阿富汗作戰(zhàn)中拓展到多項(xiàng)后勤支援保障任務(wù),如采用“帕克博特”(Packbot)系列無人車和“魔爪”(Talon)系列無人車進(jìn)行爆炸物探測(cè)和處理,洞穴搜索等任務(wù),采用SMSS運(yùn)輸裝備和補(bǔ)給;在敘利亞作戰(zhàn)中,俄軍采用“平臺(tái)-M”(Platform-M)無人車和“暗語”地面武裝平臺(tái)與無人機(jī)協(xié)同,直接參與進(jìn)攻作戰(zhàn)。
國內(nèi)地面無人裝備技術(shù)研究也取得了長足的進(jìn)步,相關(guān)高校和科研機(jī)構(gòu)研制出了多種不同用途的地面無人平臺(tái)[1]。近年來,連續(xù)進(jìn)行的幾屆“跨越險(xiǎn)阻”陸上無人系統(tǒng)挑戰(zhàn)賽有力推動(dòng)了相關(guān)技術(shù)領(lǐng)域的發(fā)展。
1.2 地面無人裝備的主要型譜
隨著相關(guān)技術(shù)領(lǐng)域的不斷進(jìn)步和裝備研究的不斷深入,地面無人裝備的使命任務(wù)領(lǐng)域還將不斷拓展,未來可能遍及戰(zhàn)場(chǎng)抵近偵察監(jiān)視、精確引導(dǎo)與毀傷評(píng)估、火力打擊與特種作戰(zhàn)、掃雷爆破與防化作業(yè)、無人值守與巡邏警戒、物資運(yùn)輸與伴隨保障、戰(zhàn)場(chǎng)救護(hù)與裝備搶修等諸多領(lǐng)域[8-9]。郝為利等[2]根據(jù)地面無人裝備使命任務(wù)需求,結(jié)合相關(guān)領(lǐng)域關(guān)鍵技術(shù)發(fā)展水平,按照無人裝備重量,構(gòu)建了地面無人裝備發(fā)展的主要型譜,由微小型、小型、輕小型、輕型、中型和重型等6種類型構(gòu)成。各型譜無人裝備一般均具備自行機(jī)動(dòng)執(zhí)行任務(wù)的能力,但根據(jù)其重量和尺寸不同,運(yùn)輸(或攜行)部署方式有所區(qū)別,所搭載的任務(wù)載荷與使命任務(wù)也不盡相同,如表1所示。
1.3 機(jī)動(dòng)部署能力需求及其主要評(píng)價(jià)指標(biāo)
機(jī)動(dòng)是地面無人裝備遂行各種任務(wù)的基本條件,從其使用條件來看,地面無人裝備面臨大量的不規(guī)則路面,例如:在野外戰(zhàn)場(chǎng),路面基本上是不規(guī)則土路、泥濘道路或者崎嶇山路;城市作戰(zhàn)中,往往要面臨高樓傾塌、公路塌陷、彈坑和廢墟阻滯等環(huán)境;對(duì)于執(zhí)行班組伴隨保障任務(wù)的無人裝備來說,還需隨單兵通過臺(tái)階、壕溝、陡崖、叢林等復(fù)雜地形。此外,對(duì)于執(zhí)行特種任務(wù)的微小型、小型與輕小型無人裝備,由于其外形尺寸相對(duì)較小,也給其機(jī)動(dòng)性特別是通過性帶來了更大的挑戰(zhàn)。隨著使命任務(wù)的不斷拓展和功能的多樣化,地面無人裝備機(jī)動(dòng)能力要求還會(huì)不斷提高[10]。

表1 不同類型無人平臺(tái)的任務(wù)載荷與使命任務(wù)
需要說明的是,機(jī)動(dòng)能力的提高不僅能夠增強(qiáng)地面無人裝備的環(huán)境適應(yīng)性,同時(shí)還可以減輕其環(huán)境感知和路徑規(guī)劃的負(fù)擔(dān);此外,具備高機(jī)動(dòng)能力可以使其采用捷徑或者更為隱蔽的路線到達(dá)任務(wù)區(qū)域,提高達(dá)成任務(wù)的快速性和隱蔽性。具有高機(jī)動(dòng)能力的無人裝備還能通過靈活的戰(zhàn)術(shù)規(guī)避動(dòng)作躲避威脅,在一定程度上提高自身的戰(zhàn)場(chǎng)生存能力。
地面無人裝備機(jī)動(dòng)性能通常用快速性、通過性、靈活性和續(xù)航能力等指標(biāo)來衡量[11-14]:
1) 快速性。常用的評(píng)價(jià)指標(biāo)有最大速度、公路平均速度、越野平均速度,兩棲無人裝備還有最大航速等。
2) 通過性。包括爬坡能力、越障能力、涉水能力、軟地面通過能力等。常用的評(píng)價(jià)指標(biāo)有最大爬坡度、最大側(cè)傾行駛坡度、過垂直墻高、過斷崖高、過崖壁高、越壕寬、涉水深等,軟地面通過能力常用通過地面時(shí)的平均接地壓力來衡量。
3) 靈活性。包括加速性、轉(zhuǎn)向性和制動(dòng)性等。常用的評(píng)價(jià)指標(biāo)有加速時(shí)間、制動(dòng)距離、最小轉(zhuǎn)向半徑等。
4) 續(xù)航能力。常用的評(píng)價(jià)指標(biāo)有最大行程、連續(xù)工作時(shí)間等。
考慮到部署方便,地面無人裝備還需滿足可運(yùn)輸及攜行能力要求(如鐵路輸送、公路輸送、航空輸送、水路輸送、空投要求等)小型、微小型無人裝備還需具備伴隨班組和單兵攜行要求。此外,根據(jù)搭載任務(wù)載荷的不同,通常還需滿足一定的平順性要求。
2 地面無人裝備典型的機(jī)動(dòng)方式
目前,地面無人裝備的典型機(jī)動(dòng)方式主要有輪式機(jī)動(dòng)、履帶式機(jī)動(dòng)、足式機(jī)動(dòng)以及由這3種方式組合而成的混合式機(jī)動(dòng),如輪履混合式、輪足混合式和履足混合式等[15]。
2.1 輪式機(jī)動(dòng)
輪式機(jī)動(dòng)具有機(jī)動(dòng)速度快、行駛效率高、噪聲小等特點(diǎn)[16],在重型、中型、輕型、輕小型等多種型譜的地面無人裝備中都有廣泛應(yīng)用。圖1為幾種典型的輪式無人裝備[17]。
其中:“粉碎者”(Crusher)無人車動(dòng)力系統(tǒng)為發(fā)動(dòng)機(jī)與鋰電池組成的混合動(dòng)力系統(tǒng),采用基于輪轂電機(jī)的全輪驅(qū)動(dòng)型式,同時(shí)安裝有硬度和高度均可調(diào)節(jié)的懸掛裝置,最大速度42 km/h,最大爬坡度>40°,越障高>1.2 m,越障寬2.03 m;多功能通用/后勤裝備(Multi-function Utility/Logistics Equipment,MULE)無人車也采用輪轂電機(jī)驅(qū)動(dòng),且車輪與獨(dú)立鉸鏈?zhǔn)杰囕S相連,構(gòu)成獨(dú)立懸掛裝置,能夠?qū)崿F(xiàn)車輛姿態(tài)調(diào)整,其最大側(cè)傾行駛坡度超過40°,同時(shí)具備車輪/車軸受損情況下采用5個(gè)甚至3個(gè)車輪應(yīng)急行駛的能力;“狼牙棒”(Mine Area Clearance Equipment,MACE)無人車采用4×4全輪電驅(qū)動(dòng)與全輪轉(zhuǎn)向技術(shù),最大速度80 km/h,最大爬坡度可達(dá)到45°。
2.2 履帶式機(jī)動(dòng)
較之輪式機(jī)動(dòng)方式,履帶式機(jī)動(dòng)雖然機(jī)動(dòng)速度和機(jī)動(dòng)效率受限,但是道路適應(yīng)性和牽引附著性能好,越野機(jī)動(dòng)能力、爬坡能力、軟地面通過能力和越障能力強(qiáng),同時(shí)可實(shí)現(xiàn)原地或中心轉(zhuǎn)向,轉(zhuǎn)向半徑小,其應(yīng)用場(chǎng)合基本遍及地面無人裝備的各個(gè)型譜。圖2為幾種典型的履帶式無人裝備[17]。
其中:“魔爪”(Talon)無人車采用電機(jī)驅(qū)動(dòng)方式,最大爬坡度48°,轉(zhuǎn)彎半徑1.04 m,底盤自重62 kg,機(jī)械臂抓舉重量可達(dá)32 kg;“劍”式無人車在“魔爪”(Talon)無人車基礎(chǔ)上進(jìn)行了改進(jìn),可進(jìn)行偵察和武裝攻擊;“粗鋸齒”(Ripsaw)無人車采用Baha越野型履帶式懸掛系統(tǒng),最大速度甚至達(dá)到112 km/h,越障高0.96 m,最大爬坡度50°,具有優(yōu)良的加速性、制動(dòng)能力和全地形通過能力。
2.3 足式機(jī)動(dòng)
足式機(jī)動(dòng)是為了適應(yīng)山地、叢林等復(fù)雜地形中執(zhí)行作戰(zhàn)任務(wù)而設(shè)計(jì)的,其設(shè)計(jì)源于仿生學(xué),足式機(jī)動(dòng)平臺(tái)的出現(xiàn)豐富了地面無人系統(tǒng)的裝備類型。與輪式、履帶式機(jī)動(dòng)方式相比,具有可任意選擇著地點(diǎn)進(jìn)行移動(dòng)的優(yōu)點(diǎn),能夠完成各種非結(jié)構(gòu)環(huán)境下的作戰(zhàn)和保障任務(wù),可擴(kuò)展部隊(duì)作戰(zhàn)空間和提高作戰(zhàn)效能,是新型作戰(zhàn)力量構(gòu)建的重要載體[6,16,18],但足式機(jī)動(dòng)的速度一般不會(huì)太快。目前,足式機(jī)動(dòng)主要應(yīng)用于輕小型無人裝備,圖3為2種典型的足式無人裝備。
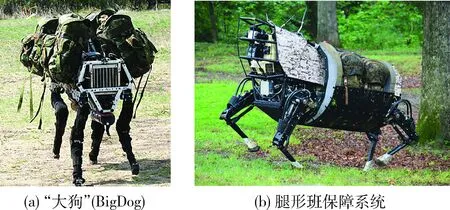
圖3 2種典型的足式無人裝備
其中:“大狗”(BigDog)機(jī)器人是為了通過極端地形而設(shè)計(jì)的,最大速度6 km/h,最大爬坡度35°,涉水深0.6 m,具有緩行、步行、小跑和快跑等多種運(yùn)動(dòng)模式;腿形班保障系統(tǒng)長度比“大狗”增加1倍,高度增加3/4,可在崎嶇和多石地形上快跑,計(jì)劃最終實(shí)現(xiàn)平地運(yùn)動(dòng)速度為11 km/h。
2.4 混合式機(jī)動(dòng)
在作戰(zhàn)運(yùn)用過程中,地面無人裝備通常要面臨多種不同的地形環(huán)境,因此單一機(jī)動(dòng)方式往往難以滿足高機(jī)動(dòng)要求。混合式機(jī)動(dòng)的目的是為了綜合各種機(jī)動(dòng)方式的優(yōu)點(diǎn),根據(jù)不同的地形環(huán)境,在輪式、履帶式、足式3種機(jī)動(dòng)方式之間切換,如美軍的GXV-T項(xiàng)目中研制的可重構(gòu)輪軌(如圖4所示),可在車輛行駛過程中實(shí)現(xiàn)圓形車輪與三角履帶的快速轉(zhuǎn)換,從而提升其在不同地形的戰(zhàn)術(shù)機(jī)動(dòng)性[19]。

圖4 可重構(gòu)輪軌
呂海洋等[20]設(shè)計(jì)了一種關(guān)節(jié)式輪履混合機(jī)動(dòng)平臺(tái),可實(shí)現(xiàn)輪式機(jī)動(dòng)和履帶式機(jī)動(dòng)間的切換,具有良好的環(huán)境適應(yīng)性和越障能力,可應(yīng)用于偵察、探測(cè)等領(lǐng)域;杜微等[21]設(shè)計(jì)了一種履足混合機(jī)動(dòng)平臺(tái),并進(jìn)行了仿真分析;輪式機(jī)動(dòng)與足式機(jī)動(dòng)也有多種結(jié)合方式,總體上可分為輪足耦合式和輪足組合式,前者主要是將腿和車輪的功能融合設(shè)計(jì)在一起,從而使車輪同時(shí)具有足式機(jī)動(dòng)的功能,如無框輪輻條驅(qū)動(dòng)輪、旋轉(zhuǎn)外行星輪臂以及可轉(zhuǎn)換變結(jié)構(gòu)輪等,后者是將輪和足2種運(yùn)動(dòng)機(jī)構(gòu)在機(jī)械上進(jìn)行獨(dú)立組合與集成,如關(guān)節(jié)式輪足混合型式、輪足分離型式、主動(dòng)適應(yīng)懸掛型式以及多自由度集體鉸接型式等[22-23];段星光等[24]還設(shè)計(jì)了一種具有輪、履、足多種運(yùn)動(dòng)模式的復(fù)合式移動(dòng)機(jī)器人,其可以實(shí)現(xiàn)輪式高速運(yùn)動(dòng)、履帶或足式越障等多種模式的運(yùn)動(dòng)。
3 基于電驅(qū)動(dòng)的無人裝備機(jī)動(dòng)技術(shù)
3.1 電驅(qū)動(dòng)的優(yōu)勢(shì)與特點(diǎn)
較之傳統(tǒng)機(jī)械傳動(dòng)系統(tǒng),采用電驅(qū)動(dòng)實(shí)現(xiàn)地面無人裝備的平臺(tái)機(jī)動(dòng),具有如下優(yōu)點(diǎn):
1) 機(jī)動(dòng)性能好,環(huán)境適應(yīng)性強(qiáng)。電驅(qū)動(dòng)系統(tǒng)具有動(dòng)態(tài)響應(yīng)速度快、加速性能好、過載能力強(qiáng)等特點(diǎn);同時(shí)其控制更加靈活,能夠?qū)崿F(xiàn)雙重轉(zhuǎn)向、機(jī)電復(fù)合制動(dòng)及能量回收等控制[25],可提高機(jī)動(dòng)性能和能源利用效率,增大續(xù)航里程。此外,如前所述,對(duì)于采用全輪獨(dú)立驅(qū)動(dòng)的電傳動(dòng)系統(tǒng)來說,驅(qū)動(dòng)力執(zhí)行機(jī)構(gòu)的冗余度增加,即便出現(xiàn)個(gè)別驅(qū)動(dòng)輪故障,平臺(tái)仍然可以依靠剩余驅(qū)動(dòng)輪完成行駛,從而提升了地面無人裝備的戰(zhàn)場(chǎng)生存能力。
2) 整車布局方便,行走機(jī)構(gòu)設(shè)計(jì)靈活。電驅(qū)動(dòng)系統(tǒng)采用電路柔性連接取代傳統(tǒng)的機(jī)械連接,各部件的布置更加靈活,裝備布局與功能重構(gòu)相對(duì)容易,可增強(qiáng)滿足多樣化戰(zhàn)爭(zhēng)行動(dòng)的能力。同時(shí),柔性連接可有效降低對(duì)行走機(jī)構(gòu)的設(shè)計(jì)約束,為懸掛、轉(zhuǎn)向等系統(tǒng)的變革提供了條件,可為催生和發(fā)展更多高適應(yīng)行走機(jī)構(gòu)奠定技術(shù)基礎(chǔ)。
3) 能量形式統(tǒng)一,任務(wù)載荷承載能力強(qiáng)。采用電驅(qū)動(dòng)時(shí),整車以電能作為基本能量源,綜合運(yùn)用變換、傳輸、控制等技術(shù),既可用于機(jī)動(dòng),也可為搭載的任務(wù)載荷供電,對(duì)武器、防護(hù)等作戰(zhàn)廣譜功能模塊具有較強(qiáng)的承載能力,可為更多新型高能偵察、打擊系統(tǒng)的應(yīng)用集成提供能源支撐。
4) 可靜音行駛,隱身能力好。在特殊作戰(zhàn)任務(wù)下,可關(guān)閉發(fā)動(dòng)機(jī),采用儲(chǔ)能系統(tǒng)給驅(qū)動(dòng)電機(jī)供電,實(shí)現(xiàn)靜音行駛,可大幅降低車輛的噪聲以及紅外特性,有利于達(dá)成任務(wù)的隱蔽性和突然性。
5) 可測(cè)試性強(qiáng),維護(hù)保障難度小。系統(tǒng)內(nèi)部狀態(tài)信息獲取方便,可測(cè)試性設(shè)計(jì)好,在線故障診斷方便,同時(shí)其系統(tǒng)結(jié)構(gòu)簡(jiǎn)單、可靠性高、維護(hù)保養(yǎng)方便。
3.2 關(guān)鍵技術(shù)
3.2.1 高適應(yīng)行走機(jī)構(gòu)及其運(yùn)動(dòng)控制技術(shù)
高適應(yīng)行走機(jī)構(gòu)是實(shí)現(xiàn)地面無人裝備高機(jī)動(dòng)的物理基礎(chǔ),對(duì)于不同型譜的無人裝備,由于其自身特點(diǎn)與作戰(zhàn)需求區(qū)別,其電驅(qū)動(dòng)行走機(jī)構(gòu)的結(jié)構(gòu)模式與運(yùn)動(dòng)控制方法也不盡相同。蓋江濤[26]針對(duì)重型履帶車輛,研究了一種雙側(cè)電機(jī)耦合驅(qū)動(dòng)結(jié)構(gòu)方案,并提出了雙電機(jī)解耦與電子機(jī)械協(xié)調(diào)差速轉(zhuǎn)向控制策略;曾慶含等[27]針對(duì)輕型履帶車輛,提出了基于“雙側(cè)主動(dòng)輪驅(qū)動(dòng)+負(fù)重輪輔助驅(qū)動(dòng)”的結(jié)構(gòu)模式(如圖5所示),即在雙電機(jī)驅(qū)動(dòng)兩側(cè)主動(dòng)輪的基礎(chǔ)上,利用電驅(qū)動(dòng)的柔性連接優(yōu)勢(shì),在負(fù)重輪輪轂內(nèi)集成了驅(qū)動(dòng)電機(jī),實(shí)現(xiàn)主動(dòng)輪+負(fù)重輪的協(xié)同驅(qū)動(dòng),在一側(cè)履帶損毀情況下,依賴負(fù)重輪的動(dòng)力輸出,可以實(shí)現(xiàn)應(yīng)急跛行,顯著提高了車輛的機(jī)動(dòng)性能和戰(zhàn)場(chǎng)生存能力。

圖5 “雙側(cè)主動(dòng)輪驅(qū)動(dòng)+負(fù)重輪輔助驅(qū)動(dòng)”結(jié)構(gòu)模式
文獻(xiàn)[28-29]作者針對(duì)小型履帶移動(dòng)平臺(tái),結(jié)合Mecanum輪和傳統(tǒng)履帶式移動(dòng)機(jī)構(gòu)的結(jié)構(gòu)原理,提出一種新型全方位移動(dòng)機(jī)構(gòu)——全方位移動(dòng)履帶,并設(shè)計(jì)了一種履帶式全方位移動(dòng)平臺(tái),可實(shí)現(xiàn)橫向運(yùn)動(dòng)、斜向45°運(yùn)動(dòng)、中心轉(zhuǎn)向、橫向復(fù)合轉(zhuǎn)向和縱向復(fù)合轉(zhuǎn)向,同時(shí)對(duì)復(fù)雜路面具有較強(qiáng)的適應(yīng)能力,其結(jié)構(gòu)模式如圖6所示。
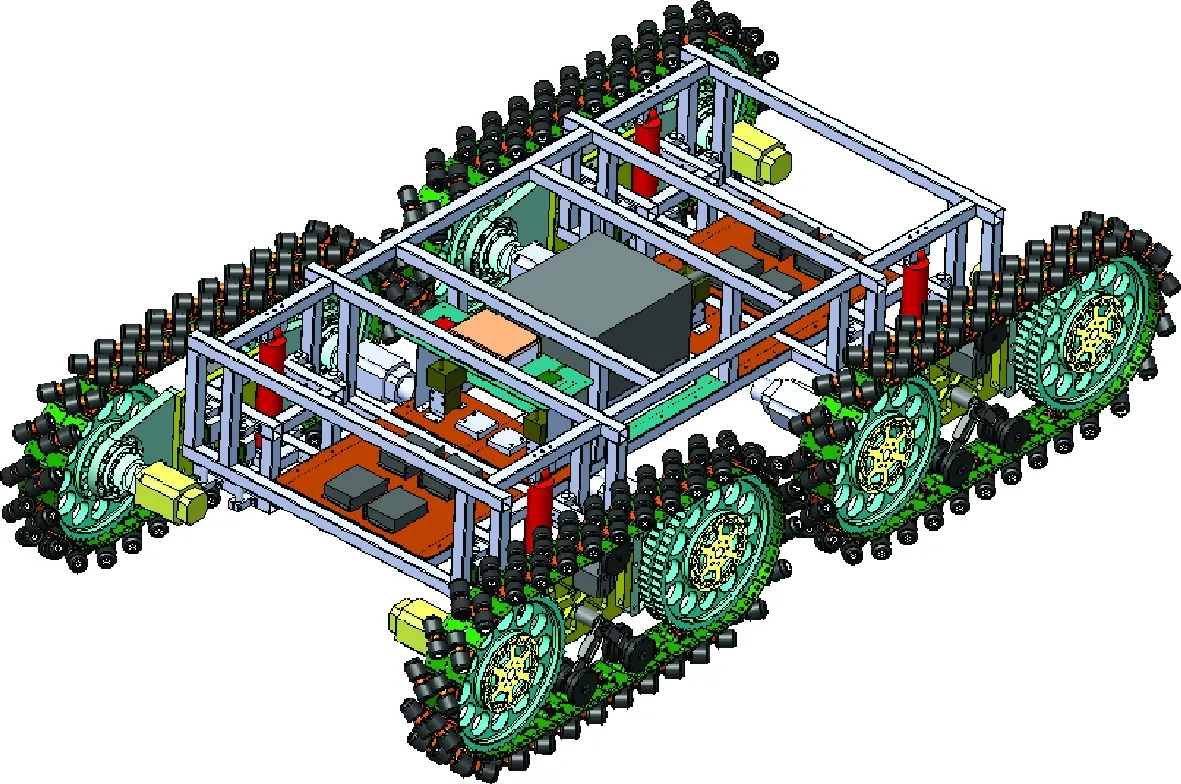
圖6 全方位移動(dòng)履帶平臺(tái)結(jié)構(gòu)模式
黑沫[30]針對(duì)非結(jié)構(gòu)化復(fù)雜環(huán)境下的機(jī)動(dòng)需求,研究了一種基于平行四邊形機(jī)構(gòu)的可變形履帶式無人平臺(tái),并對(duì)其直線行進(jìn)、轉(zhuǎn)向運(yùn)動(dòng)和爬坡穩(wěn)定性進(jìn)行了分析。
在輪式平臺(tái)電驅(qū)動(dòng)方面,采用輪轂電機(jī)驅(qū)動(dòng)成為重要的發(fā)展方向。如:GXV-T項(xiàng)目研制出采用高功率密度永磁同步電機(jī)、變頻器和行星變速機(jī)構(gòu)組成的輪轂電機(jī)驅(qū)動(dòng)系統(tǒng)樣機(jī),同時(shí)采用多模式極限行駛懸掛(Multi-mode Extreme Travel Suspension,METS)技術(shù),保證車輛在崎嶇地形上高速行駛時(shí)保持水平狀態(tài)[19];“粉碎者”(Crusher)無人車、MULE無人車等均采用輪轂電機(jī)驅(qū)動(dòng);楊貴兵[31]以8×8輪轂電機(jī)驅(qū)動(dòng)車輛為研究對(duì)象,以提高車輛行駛穩(wěn)定性和低速靈活性為基本目標(biāo),開展了車輛狀態(tài)參數(shù)估計(jì)、車輛穩(wěn)定性分析及運(yùn)動(dòng)跟蹤控制、基于多層次優(yōu)化的轉(zhuǎn)矩協(xié)調(diào)控制等研究。此外,仿生機(jī)動(dòng)機(jī)構(gòu)、行走步態(tài)規(guī)劃等研究也不斷拓展,行走機(jī)理、腿關(guān)節(jié)機(jī)構(gòu)、步態(tài)生成與控制、足端腳力分配、行走能耗優(yōu)化等方面的探索不斷深入[1,23,32]。
總體來看,電驅(qū)動(dòng)行走裝置朝著緊湊型、集成化、輕量化、多樣化方向發(fā)展;同時(shí),運(yùn)動(dòng)控制策略研究的不斷深入對(duì)機(jī)動(dòng)性能的提高具有越來越重要的作用。
3.2.2 多能量源復(fù)合電力系統(tǒng)及其能量管理技術(shù)
優(yōu)良的能源供給能力是實(shí)現(xiàn)高機(jī)動(dòng)的重要保障,不同型譜無人裝備的重量與機(jī)動(dòng)要求不同,其車載電力系統(tǒng)的供電體制與結(jié)構(gòu)體系也各不相同。對(duì)于輕型、中型、重型地面無人裝備,一般采用多能量源復(fù)合結(jié)構(gòu)的車載電力系統(tǒng)[1,33],如:美國國家機(jī)器人工程中心(National Robotics Engineering Center,NREC)研制的自主平臺(tái)演示樣車APD、“粉碎者”(Crusher)無人車,愛沙尼亞Milrem公司研制的模塊化地面無人車TheMIS,烏克蘭研制的“幽靈”2(Fantom-2)多用途無人車等。黃千等[34]分析了以發(fā)動(dòng)機(jī)-發(fā)電機(jī)組為主電源,動(dòng)力電池直接掛在直流母線上,二者并聯(lián)作為復(fù)合電力系統(tǒng)輸出電能的供電特性;鄒淵等[35]研究了一種基于隨機(jī)動(dòng)態(tài)規(guī)劃的混合動(dòng)力履帶車輛能量管理策略;李軍求等[36]提出在動(dòng)力電池與直流母線之間增設(shè)DC/DC變換器實(shí)現(xiàn)電氣解耦,并研究了一種基于發(fā)動(dòng)機(jī)負(fù)載跟隨與動(dòng)力電池功率補(bǔ)償?shù)哪芰抗芾聿呗裕欢駝偟萚37]進(jìn)一步討論了發(fā)動(dòng)機(jī)-發(fā)電機(jī)組的控制策略;馬曉軍等[38]提出了一種基于多驅(qū)動(dòng)特性能量源的車載綜合電力系統(tǒng),其原型結(jié)構(gòu)如圖7所示。系統(tǒng)采用發(fā)動(dòng)機(jī)-發(fā)電機(jī)組作為主能量源,通過脈寬調(diào)制(Pulse Width Modulation,PWM)整流器與直流供電網(wǎng)絡(luò)連接,輔助能量源采用動(dòng)力電池與超級(jí)電容復(fù)合儲(chǔ)能結(jié)構(gòu),動(dòng)力電池通過雙向DC/DC變換器與超級(jí)電容并聯(lián)到直流網(wǎng)絡(luò)。這種復(fù)合儲(chǔ)能結(jié)構(gòu)有效結(jié)合動(dòng)力電池高能量密度和超級(jí)電容高功率密度的特點(diǎn),提高了系統(tǒng)負(fù)載適應(yīng)能力。同時(shí),由于發(fā)電機(jī)和動(dòng)力電池與直流網(wǎng)絡(luò)之間都有可控功率變換裝置,2個(gè)能量源可實(shí)現(xiàn)解耦控制。
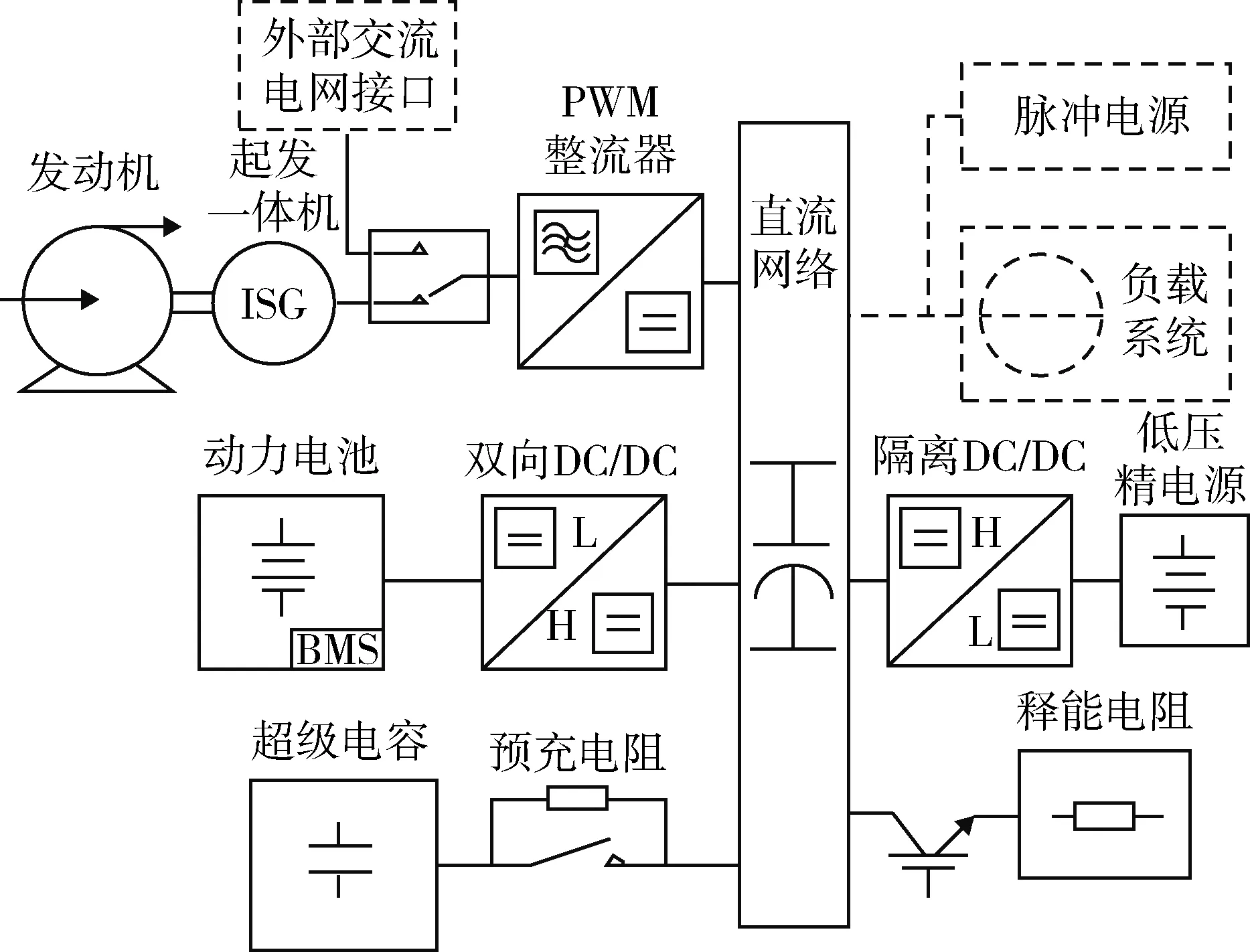
圖7 綜合電力系統(tǒng)原型結(jié)構(gòu)
劉勇等[39]研究了供電體制與電源系統(tǒng)、輸配電系統(tǒng)以及任務(wù)載荷之間的關(guān)系,提出了不同型譜、不同噸位全電車輛供電體制論證設(shè)計(jì)方法。
受動(dòng)力電池能量和功率密度限制,采用動(dòng)力電池獨(dú)立作為能量源的供電模式一般主要用于微小型和小型地面無人裝備,如美國Roboteam公司研制的PROBOTV2地面無人車。對(duì)于執(zhí)行長期無人值守任務(wù)的地面無人裝備還可考慮采用光伏發(fā)電實(shí)現(xiàn)長時(shí)間持續(xù)供電。此外,燃料電池、新材料電池、飛輪儲(chǔ)能電池、超導(dǎo)儲(chǔ)能與發(fā)電等技術(shù)及其車載化應(yīng)用的進(jìn)程也在不斷加速。
3.2.3 高功率密度電機(jī)與功率變換技術(shù)
驅(qū)動(dòng)電機(jī)及其功率變換裝置是實(shí)現(xiàn)機(jī)動(dòng)的核心部件,特別是對(duì)于中型、重型地面無人裝備來說,其功率需求大,性能要求高,體積、質(zhì)量約束苛刻,較之普通工業(yè)用電機(jī)驅(qū)動(dòng)系統(tǒng),具有高性能、高功率密度、高可靠性與高環(huán)境適應(yīng)性等特點(diǎn)[26]。如:在額定轉(zhuǎn)速以下要求驅(qū)動(dòng)電機(jī)大扭矩輸出,以滿足車輛加速、爬坡要求;在額定轉(zhuǎn)速以上又要求其弱磁能力強(qiáng),最高轉(zhuǎn)速高,以滿足車輛最高機(jī)動(dòng)速度要求。即要同時(shí)滿足高轉(zhuǎn)速和高轉(zhuǎn)矩,又受到體積和重量的限制,它的角功率密度可達(dá)到普通電機(jī)的4~10倍之多。此外還需要實(shí)現(xiàn)全轉(zhuǎn)速范圍內(nèi)效率最優(yōu)化,以提高續(xù)航里程,同時(shí)減小損耗,降低散熱難度。
李俊龍[40]針對(duì)電驅(qū)動(dòng)系統(tǒng)中的輪轂電機(jī)應(yīng)用需求,分析了恒功率運(yùn)行約束下電機(jī)的設(shè)計(jì)方法、渦流損耗、電機(jī)轉(zhuǎn)矩波動(dòng)及其抑制方法;宮海龍[41]分析了高轉(zhuǎn)矩永磁輪轂電機(jī)的磁系統(tǒng)特性,研究了電機(jī)轉(zhuǎn)矩波動(dòng)與振動(dòng)特性;蓋江濤等[42]針對(duì)基于永磁同步電機(jī)的車輛驅(qū)動(dòng)系統(tǒng)在負(fù)載變化過程中轉(zhuǎn)速受到較大影響的問題,設(shè)計(jì)了基于負(fù)載觀測(cè)的二階自抗擾控制器(Active Disturbance Rejection Controller,ADRC),實(shí)現(xiàn)系統(tǒng)速度控制,提高了動(dòng)態(tài)穩(wěn)定性能和響應(yīng)能力;李敏裕[43]針對(duì)軍用車輛驅(qū)動(dòng)系統(tǒng)高功率密度需求,開展了基于T型逆變器的永磁同步電機(jī)三電平驅(qū)動(dòng)控制技術(shù)研究。
對(duì)于足式機(jī)動(dòng)裝備來說,關(guān)節(jié)電機(jī)驅(qū)動(dòng)系統(tǒng)需具備轉(zhuǎn)動(dòng)慣量小、響應(yīng)速度快、執(zhí)行機(jī)構(gòu)靈活、驅(qū)動(dòng)力矩大、抗沖擊能力強(qiáng)等要求,以提高其機(jī)動(dòng)能力與環(huán)境適應(yīng)性,同時(shí)要滿足關(guān)節(jié)安裝空間位置和質(zhì)量限制。盛沙等[44]設(shè)計(jì)了具有復(fù)合運(yùn)動(dòng)模式的耦合驅(qū)動(dòng)關(guān)節(jié),提高了電機(jī)驅(qū)動(dòng)能力和效率。
此外,電機(jī)驅(qū)動(dòng)系統(tǒng)的電磁兼容性也是電機(jī)與功率變換裝置研究的重要內(nèi)容。一方面,驅(qū)動(dòng)電機(jī)功率大,功率變換裝置基本均采用PWM控制方式,開關(guān)頻率高,且安裝密集度高,容易產(chǎn)生電磁輻射,對(duì)控制系統(tǒng)產(chǎn)生干擾;另一方面,地面無人裝備遂行任務(wù)時(shí)需要大量的通信與控制鏈路,本身就處于一個(gè)極端復(fù)雜的電磁環(huán)境,它們也會(huì)對(duì)電機(jī)驅(qū)動(dòng)系統(tǒng)產(chǎn)生影響[45]。因此,電機(jī)驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)時(shí)需從供電特性、接地特性、安裝方式、匹配設(shè)計(jì)、濾波與屏蔽設(shè)計(jì)等多方面入手,提高系統(tǒng)的電磁兼容性。
4 結(jié)論與建議
隨著電機(jī)控制、電力變換以及新型能源等相關(guān)技術(shù)領(lǐng)域的進(jìn)步,電驅(qū)動(dòng)將成為地面無人裝備的理想驅(qū)動(dòng)方式,具有廣闊的應(yīng)用前景,需要加強(qiáng)深入研究,以適應(yīng)未來裝備發(fā)展需求。具體建議如下:
1) 加強(qiáng)頂層設(shè)計(jì)規(guī)劃論證。以作戰(zhàn)需求為牽引,開展任務(wù)需求、功能配置與技術(shù)形態(tài)的一致性轉(zhuǎn)化研究,規(guī)劃論證不同型譜無人裝備的機(jī)動(dòng)平臺(tái)技術(shù)體系和發(fā)展路線。規(guī)范不同噸位和功率等級(jí)無人裝備的供電體制、能源型式、驅(qū)動(dòng)模式等,注重“基型+變型”的發(fā)展模式,促進(jìn)基于電驅(qū)動(dòng)的機(jī)動(dòng)平臺(tái)標(biāo)準(zhǔn)化、通用化、系列化。
2) 加強(qiáng)基礎(chǔ)理論與重難點(diǎn)技術(shù)環(huán)節(jié)攻關(guān)。梳理電驅(qū)動(dòng)機(jī)動(dòng)平臺(tái)的關(guān)鍵技術(shù)體系,制定高適應(yīng)性行走機(jī)構(gòu)、高功率密度電機(jī)以及運(yùn)動(dòng)控制等關(guān)鍵技術(shù)的近期和中長期技術(shù)發(fā)展目標(biāo),構(gòu)建“關(guān)鍵技術(shù)突破、典型裝備研制、前沿技術(shù)探索”相結(jié)合的協(xié)調(diào)發(fā)展模式。重視關(guān)鍵器件、結(jié)構(gòu)材料、制造工藝等方面研究,不斷推動(dòng)電驅(qū)動(dòng)系統(tǒng)的輕量化、集成化、高效化發(fā)展。
3) 深度推進(jìn)融合式、創(chuàng)新式發(fā)展。充分吸收裝甲車輛電傳動(dòng)、民用電動(dòng)汽車等相關(guān)技術(shù)領(lǐng)域成果,注重傳統(tǒng)有人裝備,特別是老舊裝備底盤的無人化改造,探索基于電驅(qū)動(dòng)系統(tǒng)的無人化改造和直接在傳統(tǒng)推進(jìn)系統(tǒng)中加裝自動(dòng)操縱機(jī)構(gòu)進(jìn)行無人化改造等多條技術(shù)途徑。促進(jìn)燃料電池、超導(dǎo)儲(chǔ)能、功率變換等民用相關(guān)技術(shù)的移植轉(zhuǎn)化,避免重復(fù)研發(fā),降低技術(shù)風(fēng)險(xiǎn),促進(jìn)地面無人裝備穩(wěn)步、高效發(fā)展。
