船塢登陸艦聲散射時頻特征數值及試驗研究
2019-05-21 06:16:42彭子龍
聲學技術 2019年2期
關鍵詞:板塊
劉 慧,彭子龍,范 軍,吳 錕
(1.上海交通大學船舶海洋與建筑工程學院,上海 200240;2.上海船舶電子設備研究所,上海 201108)
0 引 言
當前在解決各種地區沖突或局部戰爭中,船塢登陸艦艇發揮著日益重要的作用,其船艉部分浸水的特點與一般艦艇有所不同。由于水面艦船時域回波中包含了大量自身的工作狀態、位置以及運動姿態等信息,而且在近岸的淺海水域如何預防來自魚雷、水雷等武器的定位和攻擊等問題,都引起了國內外的廣泛關注。
水面艦船參數識別按照聲吶系統工作方式的不同可以分為主動和被動兩類。其中,被動識別方式國內外現已有大量的研究。丁玉薇[1]分別從特征提取、特征選擇和分類器等方面系統總結了被動聲吶目標識別技術的現狀與發展。目前研究水面目標聲散射場的數值方法主要包括有限單元法[2-3]、邊界元法[4]和板塊元法等。其中,有限單元法和邊界元法只適用于計算量較小的低頻問題,而近年來發展起來的板塊元法[5-6]能夠較好地克服高頻計算量大的問題。該方法基于基爾霍夫(Kirchhoff)近似,用一組平面板塊元近似目標曲面,將所有板塊元的散射聲場疊加得到總散射聲場。王新寧等[7]提出了采用基于虛源的板塊元法,對6種不同尺度和噸位的典型漁船的聲目標強度進行了理論預報,并分析了海面對船舶聲吶目標強度的影響。王汝夯等[8]基于板塊元法計算了水面艦船遠場目標強度及方位分布特征。PENG Z L等[9]采用板塊元法研究了水面艦在運動過程中主動聲吶時域回波的構成。
本文將通過構建船塢登陸艦幾何模型,采用基于虛源法的板塊元對其回波特性進行仿真計算。并從工程應用的角度出發,考慮了水面的影響、船艉部分浸水的特性以及水面艦船船體各部分聲散射貢獻,計算得到目標強度、回聲強度和時域回波結構等,最后通過湖上實測對預報方法進行了驗證。
1 三維建模及網格剖分
本文首先采用UG三維建模軟件,構建了船塢登陸艦水線以下部分,該艦總長198 m,船寬25 m,平均吃水7 m,船塢艙長118.8 m,雙舵布置在距船艉端面6 m、水面以下2.5 m的位置,雙舵間距10m,如圖1所示。船塢登陸艦大致可以分為船艏、船舯和船艉三個部分,船艏有顯著凸起的球鼻艏,船舯兩側布置有減搖鰭,而船艉布置有雙舵。這里忽略了螺旋槳對聲散射的影響,但考慮了雙舵和兩側減搖鰭的影響。將UG的三維幾何模型導入到COMSOL軟件中,按照每個波長內至少有6個單元格的基本原則,剖分三角形面網格。為了提高網格剖分的質量,優先采用掠掃的方式構建四邊形網格,進而將其轉化成三角形網格,網格模型如圖2所示。
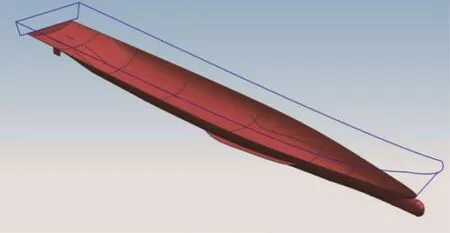
圖1 船塢登陸艦水下部分幾何模型Fig.1 Geometric model of the underwater part of dock landing ship

圖2 船塢登陸艦水下部分網格模型Fig.2 Mesh model of the underwater part of dock landing ship
2 目標強度及時域回波的計算
水面艦艇是一種界面附近具有一定吃水深度的殼體結構目標,其目標強度與水中的運動目標(比如潛艇、無人潛航器(Unmanned underwater vehicle,UUV)等)有所不同。盡管其目標強度只取決于水面以下的部分,但由于海面、海底的引入,其目標強度的計算比自由場中的目標強度計算要復雜一些。當吃水深度和接收距離遠小于水深時,其目標強度的計算可僅考慮海面,而忽略海底的影響。目前研究這類界面附近的問題主要采用的是物理聲學的方法[10]。
對于自由場中目標強度計算來說,計算中高頻最高效的方法就是板塊元法。它以基爾霍夫(Kirchhoff)近似公式為基礎,認為在聲波波長遠小于目標尺寸和它的面曲率半徑的情況下,其目標表面聲壓與振動速度的比值可以近似為平面波的計算結果。因此,積分方程被極大地簡化成一個面積分,可看成一個高頻的平面波近似,同時忽略幾何影區對聲場的貢獻,并且一般假定散射體表面滿足剛性條件[5]。
忽略時間因子e-jωt,收發合置和收發分置情況下的散射波勢函數分別為

式(1)為式(2)的特殊情況。其中:S是散射體表面;r1和r2分別為入射點和散射點矢徑,相同時為r;α1和α2分別為表面外法線方向與入射點和散射點矢徑間的夾角,兩者相同時為α;V(α)為表面反射系數,絕對硬邊界時為1,絕對軟邊界為-1。對于更復雜的浸水結構,其值取決于入射角、頻率、板厚等參數。
將目標劃分網格,每個小板塊的尺寸滿足Rmin>D2/λ條件,保證此計算場點為遠場。其中,Rmin為散射點矢徑可計算的最小距離,D為每個板塊的最大尺寸,λ為入射波波長,這樣總的散射聲場仍可表示為所有板塊散射聲場的和。最后將式(1)、(2)中的積分轉化為平面內三角形頂點坐標的和,從而得到目標的散射聲場[5]。
當考慮單界面的影響時,根據物理聲學方法計算界面附近目標的回波可知,散射聲場分為直達波的散射場(路徑1)、入射波或散射波之一經過水面的散射場(路徑3),以及船殼相對水面的鏡像“收發合置”的散射場(路徑2)等三部分,如圖3所示。需要說明的是,圖3中基陣的工作方式為收發合置工作方式。
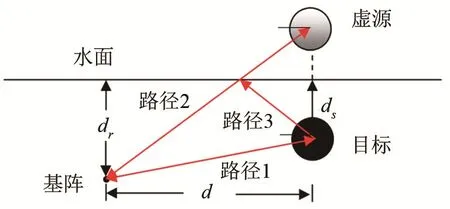
圖3 考慮水面的目標回波路徑示意圖Fig.3 Schematic diagram of the target echo paths taking into account the sea surface
考慮水面的影響,水面艦散射的總聲場為

式(3)中4項分別表示自由空間中回波、直達波經目標反射后沿水面反射回到源點或者水面反射波經目標反射后直接回到源點的散射波、入射和反射波都沿水面反射途徑傳播的波。其中,反射系數V(θ)在理想水面時取為-1。
計算水面艦船回波的主要思路是:首先構造上述的入射波信號,根據板塊元計算目標的傳遞函數,入射信號與傳遞函數做卷積運算,得到目標的回波信號y(τ)為

式中:x(τ)為入射信號;h(τ,ri,ρ)為目標傳遞函數,ri與ρ分別為目標中心到坐標原點的距離和基陣到坐標原點的距離;?表示卷積運算。
3 目標強度及回聲強度仿真計算
按照第2節介紹的方法,當最高分析頻率為10 kHz且不考慮船艉部分浸水時,船塢登陸艦的幾何模型經過網格剖分后,共得到8 968 576個三角形網格,將網格的節點及單元的拓撲信息分別導出,再根據編寫的板塊元程序,讀取上述網格和拓撲信息,計算時還應當確保法線方向垂直于目標表面朝外。但船塢登陸艦的工作狀態與常規艦船有所不同,由于船艉部分浸水,因此其目標強度的計算也比常規的艦船復雜一些。目前處理這類問題,普遍采用的是“先分部計算后合成”的思想,即將船塢登陸艦分成未浸水部分和浸水部分分別計算,然后按照式(5)進行合成:

式中,TSi為每一部分的目標強度,TStotal為合成后總的目標強度,N為劃分的部分數目。
圖4分別給出了船塢登陸艦在5 kHz和10 kHz頻率下,船艉部分浸水和沒有浸水情況下的目標強度隨水平方位角的變化情況(0°和180°分別對應船艏和船艉方向)。

圖4 船塢登陸艦模型不同頻率時的目標強度Fig.4 Target strengths of the dock landing ship model at different frequencies
由圖4可以得到如下結論:
(1)對5 kHz和10 kHz兩個不同的頻點來說,船塢登陸艦在船艏方向(0°)的目標強度約為7~15 dB;在正橫方位(90°)附近,其目標強度呈現最大值,約為32~37 dB;隨著角度偏離正橫附近(90°±5°),其目標強度迅速下降;在船艉方向由于平整船殼強烈的鏡反射作用,其目標強度又迅速提高,約為12~15 dB;
(2)在正橫到船艉過渡的角度(110°~170°)內,目標強度有顯著的下降趨勢,一般在150°附近出現低谷,其目標強度值比船艏到正橫過渡的角度(10°~80°)整體上要低許多。此外,10°~80°范圍內目標強度基本比較穩定。
(3)不論船艉是否浸水,其目標強度隨水平角度的變化規律卻差別不大,僅在160°~180°的范圍,稍微有所區別(<1.5 dB),其它角度基本不變。這是由于一方面浸水的部位相比整個船體來說仍然很小,另一方面由于船艉在110°~170°范圍內本身目標強度就比較低,因此,浸水以后船殼的目標強度降低并不明顯。
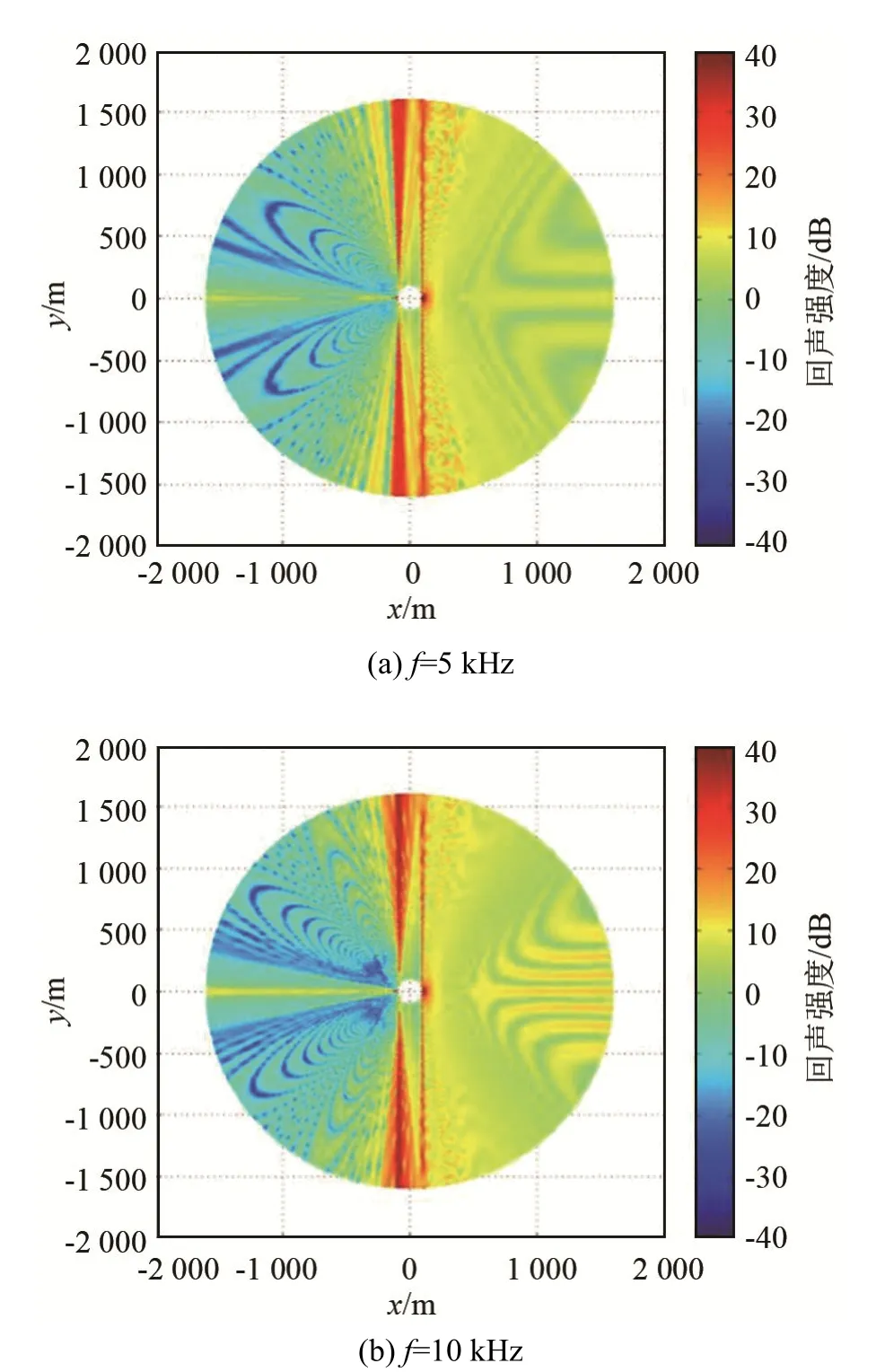
圖5 船塢登陸艦模型不同頻率隨距離變化的回聲強度Fig.5 Variations of the echo strength of dock landing ship model with distance at different frequencies
由于具備聲制導功能的魚雷在攻擊和定位船塢登陸艦的過程中,經歷了由聲學遠場向聲學近場的動態變化,因此單一的參數“目標強度”往往不能滿足作戰的需求,這就需要充分考慮距離和方位角對回聲強度的影響。為此,我們仍然考慮船塢登陸艦船艉部分浸水,計算了船塢登陸艦從遠場(1 600 m處)向近場(50 m處)過渡時隨水平方位角度變化的回聲強度,圖5為回聲強度的計算結果。
由圖5可以得到如下結論:
(1)對比5 kHz和10 kHz的計算結果,不難發現:頻率越高,近場相干疊加越顯著,這是由于頻率較高時近場半波帶數目更多引起的[11]。當達到一定的距離后,散射聲場進入遠場區。而且頻率越低,波長越長,越容易在更近的距離上達到聲學遠場,這一點很容易從近遠場判定的經驗公式上得到證實。
(2)由于船塢登陸艦是一個幾何高度上各向異性的復雜目標,在不同方位角上其近遠場的起伏特性差別顯著。在船艏附近±80°范圍內,回聲強度基本接近穩定,更容易達到遠場。這是由于位于船艏的球鼻艏結構凸出且光滑,其回聲強度隨距離的變化規律更接近剛性球的變化規律。而在正橫附近,上下各出現了兩條非常強且很狹窄的回聲強度帶,這兩條回聲強度帶分別是由船舯鼓出的線型以及船艉的艉舵引起的。在船艉附近±80°范圍內,回聲強度呈顯著的“蝶形”條紋,它的形成和船艉的雙舵有關。當兩條聲線同時達到左右雙舵的舵面時,經過回波的干涉疊加就會形成這種特殊的條紋。此外,需要說明的是,由于板塊元沒有考慮遮擋的作用,因此可能出現部分虛假的干涉條紋。
當船塢登陸艦在近岸的淺海區執行任務時,由于面臨著來自海底水雷攻擊的威脅,因此研究其主動聲吶探測的通過特性就顯得尤其重要。假定水雷探照波束全開角為10°,水雷深度30 m,船塢登陸艦通過水雷上方(如圖6所示)。在其通過水雷上方的整個過程中,其回聲強度的計算結果如圖7所示。可見在-40~40 m的船舯范圍內,回聲強度最強,這是由船塢登陸艦船舯偏寬的線型決定的。隨著距離向兩頭增大,回聲強度逐漸減弱。但在100 m的船艉附近,回聲強度又有所提高,這是由于雙舵以及船艉平整的船底導致的。

圖6 船塢登陸艦通過水雷上方示意圖Fig.6 Schematic diagram of the dock landing ship passing over a mine
4 時域回波結構試驗驗證

圖7 船塢登陸艦通過水雷上方的回波強度計算結果Fig.7 The calculation result of echo strength of the dock landing ship passing over the mine
為研究水面艦艇的時域回波特征,在某水庫開展了水面艦模型聲散射回波試驗。試驗區水域開闊,平均水深24 m。試驗中所用的發射陣為收發合置換能器陣,發射頻率范圍為100~200 kHz,脈寬為0.5 ms,發射周期為100 ms,中心頻率為150 kHz時水平開角為38°,垂直開角為18°。接收換能器為32元陣,頻率150 kHz時水平開角為6°,垂直開角為19.4°。接收換能器的靈敏度為-179.7~-190.2 dB ref 1V/μPa。測量時發射陣發射深度為2 m,陣面垂直于水面艦駛過的方向。水面艦試驗測量系統布置圖如圖8所示。此外,試驗設備還包括激光測距儀、基陣固定架、水面艦遙控器等,其中激光測距儀的測量范圍為5~1 463 m,測量誤差為±1 m。
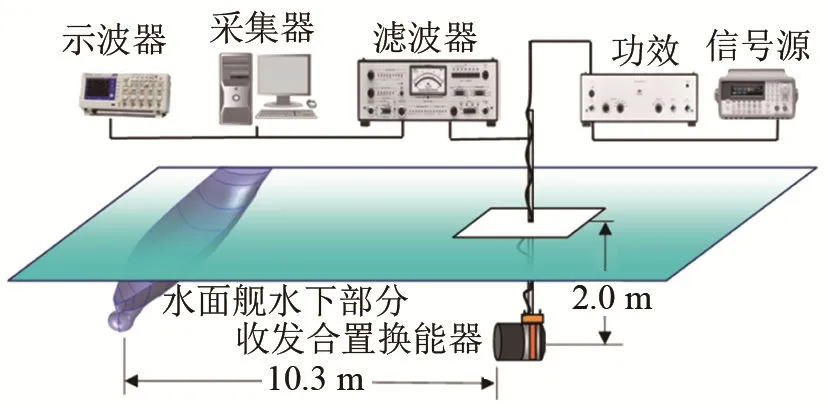
圖8 水面艦試驗測量系統布置圖Fig.8 The layout of the experimental system for testing surface ship
這里的水面艦模型總長3.7 m,船寬0.46 m,吃水深度0.16 m;船艉布置雙舵,舵長0.14 m,寬0.1 m,平均厚度0.02 m,雙舵中心距0.2 m。模型內部采用鐵棒壓載,因而可以不必考慮壓載水艙聲透射的影響。試驗測得的時域回波特征如圖9(a)所示,水面艦的回波特征由若干條U型曲線構成。圖9(b)為根據第2節介紹的方法得到的水面艦回波。可見,利用板塊元法可以計算出水面艦運動過程中的4條主要的回波曲線,且位置、形狀和亮度都較符合,試驗和仿真結果符合得較好。進一步分析,可以確定水面艦時域回波特征的幾條U型曲線分別是由船艏、船舯和兩個艉舵引起的。由于板塊元計算中并未考慮板塊元間的遮擋效應,因此使得仿真結果中的左舵引起的U型曲線的左半部分以及船艏引起的U型曲線的右半部分清晰可見,而試驗中則分別由于右舵和船艉的遮擋而觀察不到該部分的曲線特征。
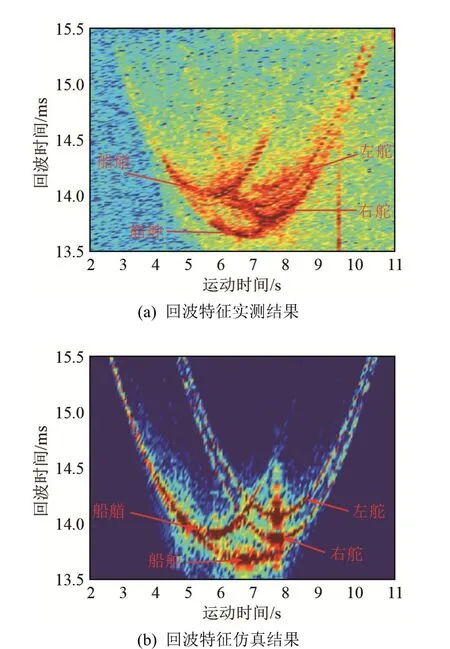
圖9 水面艦回波特征試驗和仿真對比結果Fig.9 Comparison between the echo characteristics obtained by simulation and experiment
5 結 語
本文簡要介紹了基于虛源法的板塊元基本原理以及目標強度、時域回波的計算方法。采用UG和COMSOL軟件建立了船塢登陸艦的三維網格模型,考慮水面反射以及船艉部分浸水的影響,計算得到了水平方位上的目標強度、由遠場到近場回聲強度的過渡特性以及淺海水域下通過水雷正上方時回聲強度的通過特性。最后通過開展運動水面艦船模型聲散射湖上試驗,獲取了艦船模型時域回波特征,并與計算結果做了對比,得出以下結論:
(1)船塢登陸艦在正橫方位附近,其目標強度呈現最大值;隨著角度偏離正橫附近,其目標強度迅速下降;在船艉方向由于平整船殼強烈的鏡反射作用,其目標強度又相應提高。
(2)不論船艉是否浸水,其目標強度隨水平角度的變化規律差別不大,僅在船艉的160°~180°的范圍,稍微有所區別(<1.5 dB),其它角度基本不變。
(3)對由近場到遠場回聲強度的過渡來說,頻率越高,近場相干疊加越顯著。在不同方位角上其近遠場的起伏特性差別顯著。在船艏附近±80°范圍內,回聲強度基本接近穩定。而在正橫附近,上下各出現了兩條非常強且很狹窄的回聲強度帶,這兩條回聲強度帶分別是由船舯鼓出的線型以及船艉的艉舵引起的。在船艉附近±80°范圍內,回聲強度呈現顯著的“蝶形”條紋,它的形成和船艉的雙舵有關。
(4)船塢登陸艦在通過水雷上方的整個過程中,其回聲強度在-40~40 m的船舯范圍內最強,這是由船塢登陸艦船舯偏寬的線型決定的。隨著距離向兩頭增大,回聲強度逐漸減弱。但在100 m的船艉附近,回聲強度又有所提高,這是由于雙舵以及船艉平整的船底導致的。
(5)利用板塊元法可以計算出水面艦運動過程中的4條主要的回波曲線,且位置、形狀和亮度都較符合,試驗和仿真結果符合得較好。
猜你喜歡
股市動態分析(2024年8期)2024-04-28 06:03:10
中學生數理化(高中版.高考理化)(2020年9期)2020-10-27 02:30:48
小哥白尼(神奇星球)(2020年3期)2020-07-27 01:32:36
股市動態分析(2019年14期)2019-07-10 04:25:36
股市動態分析(2019年16期)2019-07-10 04:23:23
股市動態分析(2016年24期)2017-01-07 08:54:53
中國衛生(2016年2期)2016-11-12 13:22:24
股市動態分析(2016年5期)2016-09-29 12:42:27
股市動態分析(2016年29期)2016-08-04 13:59:43
太空探索(2015年3期)2015-07-12 11:01:40
