基于EMD與SVM的仿生機(jī)器魚(yú)人工側(cè)線智能探測(cè)方法
2019-05-17 07:38:02趙振軼
水下無(wú)人系統(tǒng)學(xué)報(bào) 2019年2期
劉 鈺, 胡 橋, 趙振軼, 魏 昶
?
基于EMD與SVM的仿生機(jī)器魚(yú)人工側(cè)線智能探測(cè)方法
劉 鈺1,3, 胡 橋1,2,3, 趙振軼1,3, 魏 昶1,3
(1. 西安交通大學(xué) 機(jī)械工程學(xué)院, 陜西 西安, 710049;2. 西安交通大學(xué) 機(jī)械制造系統(tǒng)工程國(guó)家重點(diǎn)實(shí)驗(yàn)室,陜西 西安, 710049;3. 西安交通大學(xué) 陜西省智能機(jī)器人重點(diǎn)實(shí)驗(yàn)室, 陜西 西安, 710049)
針對(duì)水下聲學(xué)感知與信息交互系統(tǒng)常常受到混響或多途效應(yīng)干擾, 而光學(xué)傳感也容易受到水質(zhì)渾濁等環(huán)境制約的現(xiàn)狀, 為了解決仿生機(jī)器魚(yú)在復(fù)雜水下環(huán)境干擾下的目標(biāo)精確探測(cè)問(wèn)題, 文中提出一種基于仿生人工側(cè)線(ALL)的水下運(yùn)動(dòng)目標(biāo)智能探測(cè)方法。首先, 通過(guò)經(jīng)驗(yàn)?zāi)J椒纸?EMD)將ALL系統(tǒng)接收到的原始信號(hào)分解為不同的本征模態(tài)函數(shù)(IMFs), 從而將有用信號(hào)與干擾進(jìn)行分離; 然后, 在水中放置不同頻率的振動(dòng)物體模擬不同魚(yú)類(lèi), 通過(guò)IMFs中的特征頻率進(jìn)行水下運(yùn)動(dòng)目標(biāo)的識(shí)別; 最后, 將IMFs的能量值頻譜信息作為支持向量機(jī)(SVMs)的輸入, 從而智能識(shí)別水下運(yùn)動(dòng)物體的方位。將這一探測(cè)方法與ALL結(jié)合并進(jìn)行水池實(shí)驗(yàn)驗(yàn)證, 結(jié)果表明, 文中所提出的方法相比于傳統(tǒng)的如快速傅里葉變換(FFT)和神經(jīng)網(wǎng)絡(luò)等方法具有更好的探測(cè)性能。
仿生機(jī)器魚(yú); 人工側(cè)線;經(jīng)驗(yàn)?zāi)J椒纸猓恢С窒蛄繖C(jī); 智能探測(cè)
0 引言
目前, 仿生機(jī)器魚(yú)等水下航行器常應(yīng)用聲學(xué)和光學(xué)系統(tǒng)作為信息交互的窗口, 進(jìn)行水下信息感知。對(duì)光學(xué)感知, 在圖像處理之前, 需要對(duì)已獲得的水下圖像數(shù)據(jù)進(jìn)行預(yù)處理, 減少噪聲量、糾正衰減和幾何失真, 并通過(guò)繁瑣的觀察識(shí)別技術(shù)等方能實(shí)現(xiàn)水下機(jī)器人的感知功能, 不但成像質(zhì)量有限, 且受水質(zhì)渾濁度影響, 這些因素限制了光學(xué)原理在水下信息感知中的應(yīng)用[1]。聲像聲吶雖然可以彌補(bǔ)光學(xué)感知環(huán)境受限的不足, 但由于其成像是一種聲學(xué)圖像, 當(dāng)仿生機(jī)器魚(yú)周?chē)h(huán)境空間結(jié)構(gòu)復(fù)雜時(shí), 聲波會(huì)通過(guò)多種途徑返回?fù)Q能器, 因此引起“重影”, 使其無(wú)法對(duì)周?chē)h(huán)境進(jìn)行精確感知。因此探索水下機(jī)器魚(yú)群的新型感知技術(shù)十分必要。
側(cè)線是魚(yú)類(lèi)獨(dú)有的一種水下感知器官, 借助這種感知器官, 魚(yú)類(lèi)可以在復(fù)雜流體環(huán)境中實(shí)現(xiàn)交互學(xué)習(xí)、獵物追蹤、地圖定位、機(jī)動(dòng)避障及目標(biāo)識(shí)別等功能。當(dāng)水下環(huán)境非常復(fù)雜時(shí), 在沒(méi)有光線的深海區(qū)域, 魚(yú)類(lèi)視覺(jué)會(huì)部分或者全部喪失作用, 在這種環(huán)境下, 魚(yú)類(lèi)依然能夠利用自身特有的側(cè)線系統(tǒng)來(lái)感知水流場(chǎng)信息[2-5], 魚(yú)類(lèi)側(cè)線感知器官如圖1所示[2], 圖上黑色的點(diǎn)代表側(cè)線上的神經(jīng)丘。大量觀測(cè)研究發(fā)現(xiàn), 與傳統(tǒng)的水聲或光學(xué)探測(cè)原理截然不同, 魚(yú)類(lèi)通過(guò)側(cè)線系統(tǒng)感知水壓、水流等輔助運(yùn)動(dòng)感知, 其感知原理以相對(duì)運(yùn)動(dòng)目標(biāo)間的水介質(zhì)流動(dòng)信息作為信息源, 為仿生機(jī)器魚(yú)等水下新型的自主無(wú)人航行器感知水下信息提供一條新思路。
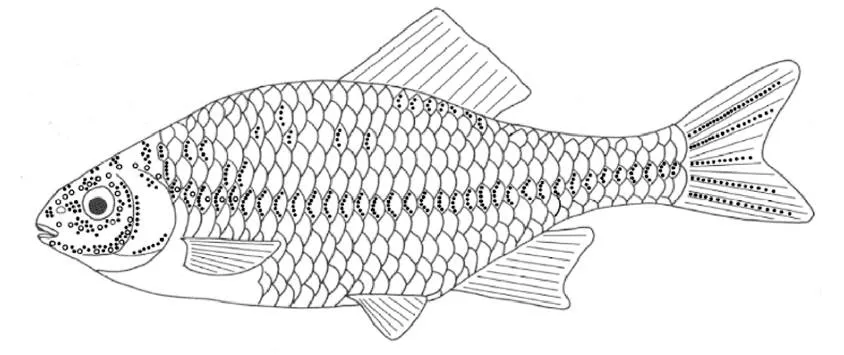
圖1 魚(yú)類(lèi)側(cè)線系統(tǒng)
現(xiàn)有研究中, 關(guān)于仿生人工側(cè)線(artificial lateral line, ALL)的數(shù)據(jù)采集處理[6-7]大多直接采用原始信號(hào)進(jìn)行, 沒(méi)有在原始信號(hào)的基礎(chǔ)上進(jìn)行降噪、濾波和分解等更深層的挖掘手段獲取本征目標(biāo)特征信息。另外, 在基于仿生ALL的數(shù)據(jù)處理分析的識(shí)別定位技術(shù)研究[8-9]中, 將陣列信號(hào)與機(jī)器學(xué)習(xí)方法結(jié)合進(jìn)行智能識(shí)別的研究較少, 特別是在小樣本的情況下, 顯得實(shí)用性不足。文中設(shè)計(jì)了一種具有12個(gè)高精度傳感器的ALL系統(tǒng), 利用ARM板對(duì)數(shù)據(jù)進(jìn)行采集, 嘗試在原始信號(hào)的基礎(chǔ)上進(jìn)行經(jīng)驗(yàn)?zāi)B(tài)分解(empirical mode decomposition, EMD), 通過(guò)提取出運(yùn)動(dòng)目標(biāo)有效的本征模態(tài)函數(shù)(intrinsic mode function, IMF)分量, 實(shí)現(xiàn)不同目標(biāo)的運(yùn)動(dòng)特征探測(cè)。然后采用支持向量機(jī)(support vector machine, SVM)對(duì)提取出的小樣本信號(hào)進(jìn)行訓(xùn)練和分類(lèi), 實(shí)現(xiàn)運(yùn)動(dòng)目標(biāo)的方位辨識(shí)。
1 實(shí)驗(yàn)步驟
依據(jù)魚(yú)類(lèi)側(cè)線器官分布生物學(xué)和陣列信號(hào)處理中布陣原理[10-11], 文中設(shè)計(jì)的仿生ALL陣列系統(tǒng)結(jié)構(gòu)如圖2所示。采用一款高精度、高靈敏度的壓力傳感器(MS5803)作為側(cè)線系統(tǒng)的陣列傳感單元, 共12個(gè), 組成2列分布在側(cè)線結(jié)構(gòu)兩側(cè), 傳感器間距為4 cm, 兩列間距為8 cm。側(cè)線外殼采用光敏樹(shù)脂通過(guò)3D打印形成。
整個(gè)實(shí)驗(yàn)系統(tǒng)如圖3所示, 所有實(shí)驗(yàn)在一個(gè)1.8 m×1 m×0.6 m的水槽中進(jìn)行, 采用激振器連接連桿, 連桿末端連接有鋼球(直徑20 mm)或塑料板(模擬魚(yú)尾鰭擺動(dòng))2種運(yùn)動(dòng)物體, 通過(guò)控制頻率和振幅來(lái)模擬水下運(yùn)動(dòng)目標(biāo)。激振器和側(cè)線系統(tǒng)安裝固定在鋁型材框架上。采用信號(hào)發(fā)生器為激振器提供信號(hào)。側(cè)線系統(tǒng)信號(hào)有STM32通過(guò)IIC(inter-integrated circuit)協(xié)議進(jìn)行采集, 采集數(shù)據(jù)通過(guò)串口發(fā)送至個(gè)人計(jì)算機(jī)(personal computer, PC)進(jìn)行數(shù)據(jù)處理。
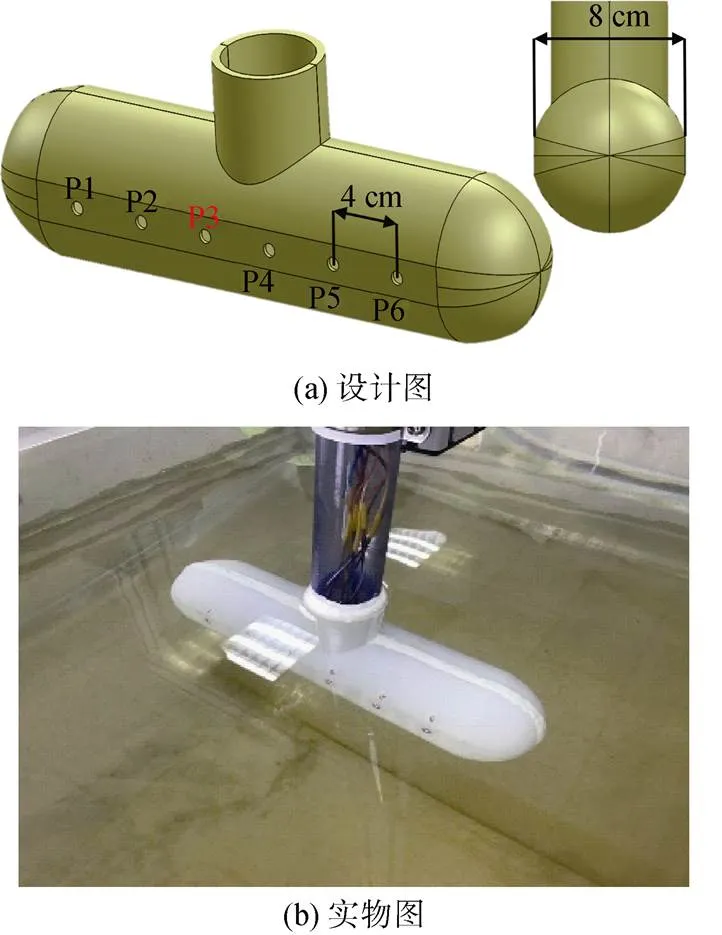
圖2 12陣元的仿生人工側(cè)線陣列
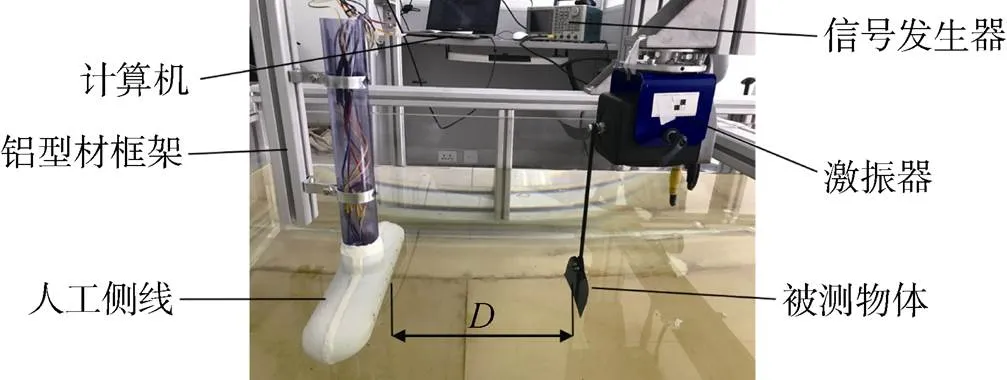
圖3 實(shí)驗(yàn)設(shè)備及場(chǎng)景圖
2 基于EMD的ALL目標(biāo)探測(cè)方法
2.1 經(jīng)驗(yàn)?zāi)B(tài)分解
經(jīng)驗(yàn)?zāi)B(tài)分解(EMD)是一種新型自適應(yīng)信號(hào)時(shí)頻處理方法, 由Huang等[12]提出, 它可將非平穩(wěn)信號(hào)自適應(yīng)表示為幾種不同簡(jiǎn)單振蕩模型的總和。通過(guò)EMD, 可以將有用信號(hào)分解為許多IMF分量。而對(duì)于每個(gè)IMF分量應(yīng)滿(mǎn)足: 1) 在整個(gè)數(shù)據(jù)集中, 極值的數(shù)量和過(guò)零點(diǎn)的數(shù)量應(yīng)相等或者最多相差1; 2) 在任意一點(diǎn), 由局部最大值和局部最小值所定義的包絡(luò)線上的平均值應(yīng)為零。
經(jīng)過(guò)一系列的變換, 任何信號(hào)都可以被EMD分解
因此, 可以將信號(hào)通過(guò)EMD分解為個(gè)IMF分量和1個(gè)余量。IMF分量和余量分別包含從高到低不同頻段范圍。EMD提供了一種多尺度分析方法: 不同時(shí)間尺度的正交信號(hào)集合。
圖4顯示了ALL系統(tǒng)單通道(第3個(gè)壓力傳感器, 記為P3, 如圖2(a)所示)在2種目標(biāo)運(yùn)動(dòng)下的信號(hào)原始頻譜圖和EMD分解頻譜圖。小球位于ALL中壓力傳感器P3正前方, 距離5 cm, 振動(dòng)頻率7 Hz, 振動(dòng)方向與側(cè)線長(zhǎng)邊垂直。尾鰭位于ALL中傳感器P3正前方, 距離5 cm。振動(dòng)頻率1 Hz, 振動(dòng)方向與側(cè)線長(zhǎng)邊垂直。

圖4 ALL信號(hào)頻譜
從圖4(a)中可以看出, 目標(biāo)為小球且頻率較高時(shí), 信號(hào)原始特征頻譜存在噪聲點(diǎn)較多, 特征不明顯, 同時(shí)由于運(yùn)動(dòng)頻率較高, 側(cè)線系統(tǒng)所探測(cè)到的頻譜圖峰值所對(duì)應(yīng)的能量較高。從圖4(c)中可以看出, 當(dāng)運(yùn)動(dòng)目標(biāo)低頻運(yùn)動(dòng)時(shí), 所產(chǎn)生的水波能量值較低, 側(cè)線單元信號(hào)所對(duì)應(yīng)的頻譜峰值較低, 同時(shí), 低頻運(yùn)動(dòng)下目標(biāo)信號(hào)的噪聲少, 特征明顯。同時(shí), 由圖4(b)采用EMD分解后, 通過(guò)將不同頻段的IMF分量分離, 能夠有效地從噪聲較大的頻譜中提取出有用信息。在圖4(d)中, 通過(guò)EMD分解, 也能夠使得原始信號(hào)中特征信息更加明顯。
文中側(cè)線系統(tǒng)的探測(cè)部分, 信號(hào)的處理流程如圖5所示, 通過(guò)側(cè)線系統(tǒng)對(duì)水下水壓變化信息進(jìn)行獲取, 對(duì)原始信號(hào)進(jìn)行EMD分解, 對(duì)前3個(gè)IMF分量進(jìn)行快速傅里葉變換(fast Fourier transformation, FFT), 提取到有效信號(hào)則根據(jù)幅值和頻率信息進(jìn)行目標(biāo)類(lèi)型的探測(cè), 若沒(méi)有提取到有用信號(hào), 則再次進(jìn)行信號(hào)的獲取。針對(duì)側(cè)線實(shí)驗(yàn), 此處以比較具有代表性的7 Hz(小球)和1 Hz(尾鰭)舉例說(shuō)明, 實(shí)驗(yàn)證實(shí)針對(duì)其他目標(biāo)振動(dòng)頻率以上規(guī)律同樣適用。
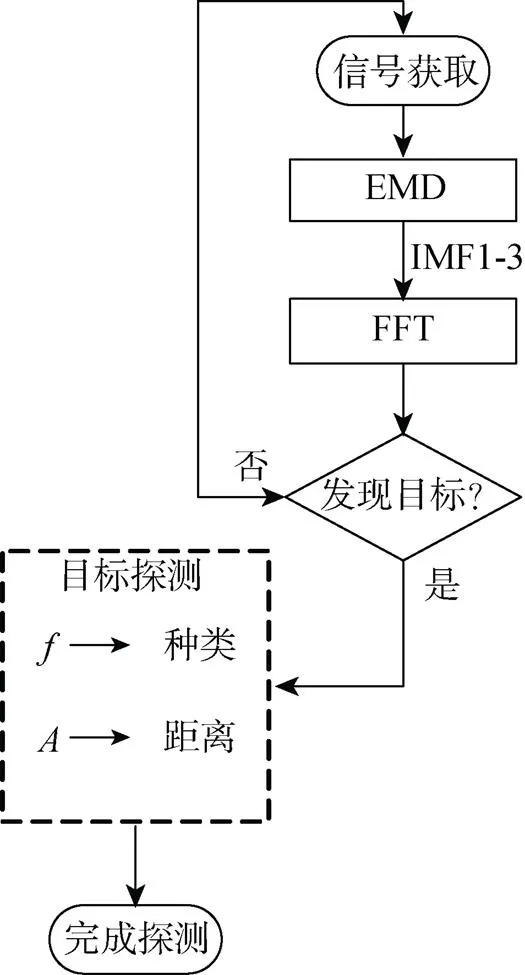
圖5 ALL探測(cè)流程圖
2.2 ALL探測(cè)性能
文中分別采用小球和尾鰭做頻率的特征探測(cè), 小球和尾鰭距離側(cè)線均為5 cm, 振動(dòng)方向與側(cè)線長(zhǎng)邊垂直, 小球頻率范圍為4 ~10 Hz, 步長(zhǎng)1 Hz。尾鰭頻率范圍為0.4~1.3 Hz, 步長(zhǎng)0.1 Hz。探測(cè)結(jié)果如圖6所示。通過(guò)圖6可以看到, 側(cè)線系統(tǒng)所探測(cè)到的頻率和目標(biāo)頻率基本一致, 因此通過(guò)側(cè)線系統(tǒng)信號(hào)的特征頻率值可以判斷出特征信號(hào)的運(yùn)動(dòng)頻率。
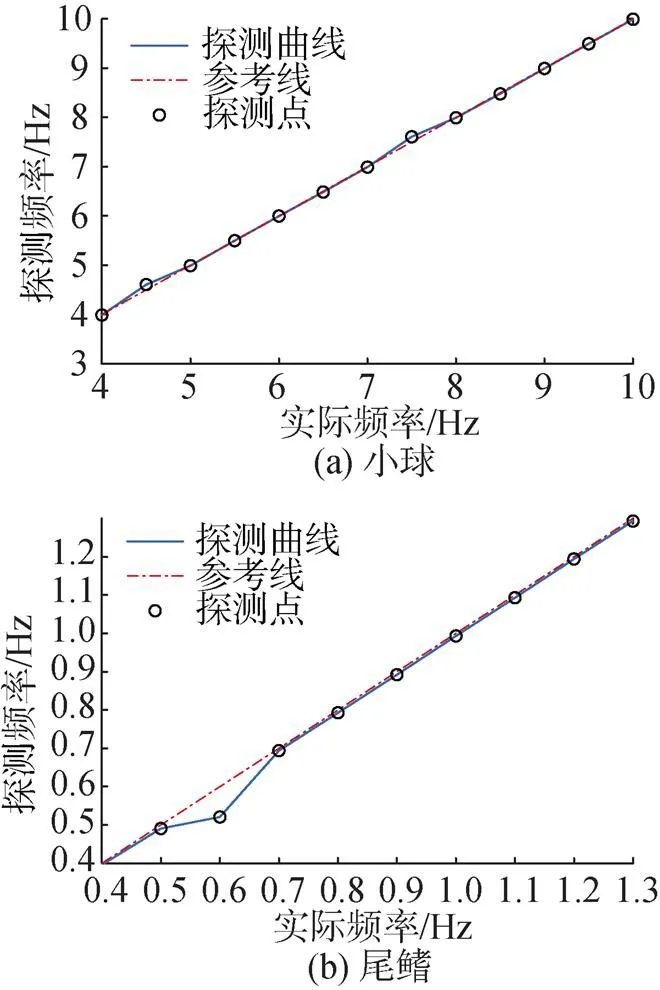
圖6 目標(biāo)探測(cè)頻率與實(shí)際頻率對(duì)比
圖7為距離探測(cè)實(shí)驗(yàn), 將振動(dòng)小球放置在距離側(cè)線不同位置, 范圍為5~30 cm, 步長(zhǎng)為5 cm, 頻率均為7 Hz。從圖中可以看出, 當(dāng)運(yùn)動(dòng)目標(biāo)與側(cè)線系統(tǒng)距離增加時(shí), 目標(biāo)運(yùn)動(dòng)引起的水波能量在傳播過(guò)程中逐漸衰減, 因此側(cè)線系統(tǒng)所探測(cè)到的目標(biāo)特征頻率下所對(duì)應(yīng)的峰值逐漸降低, 這說(shuō)明通過(guò)側(cè)線系統(tǒng)利用特征頻率的幅值估算運(yùn)動(dòng)目標(biāo)的距離是可行的。
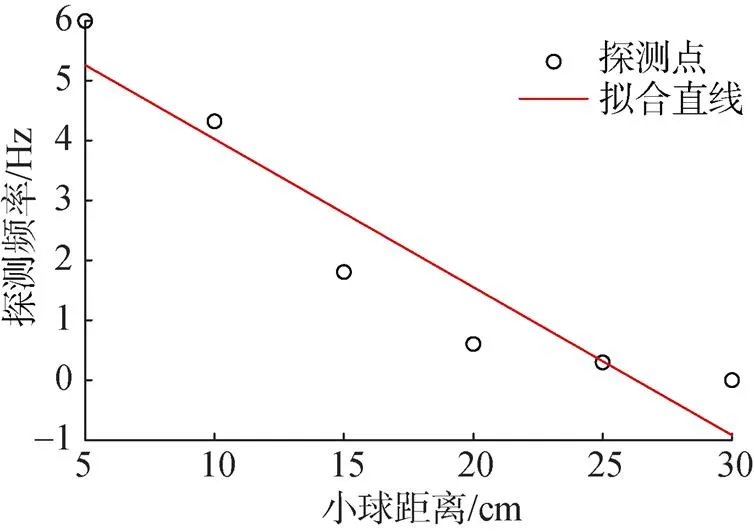
圖7 小球探測(cè)距離和實(shí)際距離對(duì)比
3 基于SVM的ALL目標(biāo)方位識(shí)別
3.1 支持向量機(jī)
支持向量機(jī)(SVM)作為一種基于統(tǒng)計(jì)學(xué)理論的機(jī)器學(xué)習(xí)算法, 在分類(lèi)、回歸和異常探測(cè)等方面應(yīng)用廣泛。常規(guī)的SVM算法只能處理二分類(lèi)問(wèn)題, 基本思路是將數(shù)據(jù)轉(zhuǎn)化為高緯度的特征空間, 并在特征空間中找到能夠最大化地將2個(gè)類(lèi)別區(qū)分的最優(yōu)超平面。而關(guān)于SVM的理論方法、算法以及分析軟件的使用都十分方便。由于傳統(tǒng)的SVM算法是為二分類(lèi)而設(shè)計(jì)的, 因此本身并不適合做方位預(yù)估這種多分類(lèi)問(wèn)題, 因此文中提出一種能夠處理多分類(lèi)問(wèn)題的SVM算法。
通過(guò)將多個(gè)二分類(lèi)模型進(jìn)行組合, 可以獲得多分類(lèi)模型。對(duì)于一個(gè)分類(lèi)的問(wèn)題(2), 如果其為類(lèi)可分的, 則其必兩兩可分; 相反的, 如果其類(lèi)別兩兩可分, 則其必為類(lèi)可分。通過(guò)多個(gè)二分類(lèi)器可以構(gòu)建一個(gè)分類(lèi)模型。對(duì)于分類(lèi)問(wèn)題, 目前已經(jīng)有多種方法被提出, 例如“一對(duì)一”、“一對(duì)多”、定向無(wú)環(huán)圖SVM等。在一些文章中已經(jīng)顯示出“一對(duì)一”法在實(shí)際使用中優(yōu)勢(shì)更加明顯, 因此文中研究匯總采用“一對(duì)一”的方法來(lái)識(shí)別不同類(lèi)別。

為了模擬魚(yú)類(lèi)對(duì)運(yùn)動(dòng)目標(biāo)的方位辨識(shí)功能, 文中構(gòu)建了基于EMD和SVM的ALL方位識(shí)別模型, 圖8顯示了側(cè)線系統(tǒng)的目標(biāo)方位識(shí)別流程框圖。采用EMD分解IMF分量, 對(duì)其求取平均能量值作為SVM的輸入, 從而進(jìn)行運(yùn)動(dòng)目標(biāo)特征方位的識(shí)別。
圖8 目標(biāo)方位識(shí)別流程圖
3.2 基于ALL的目標(biāo)方位探測(cè)方法性能
文中采用不同目標(biāo)方位的側(cè)線數(shù)據(jù)對(duì)SVM模型進(jìn)行訓(xùn)練, 然后利用訓(xùn)練好的SVM對(duì)不同方位目標(biāo)的側(cè)線測(cè)試信號(hào)進(jìn)行分類(lèi), 從而完成目標(biāo)方位識(shí)別。文中針對(duì)側(cè)線系統(tǒng)方位識(shí)別的數(shù)據(jù)庫(kù)生成如圖9所示。針對(duì)小球和尾鰭分別進(jìn)行數(shù)據(jù)庫(kù)的構(gòu)造, 小球距離側(cè)線5 cm, 分布在如圖9所示4個(gè)點(diǎn), 振動(dòng)方向與側(cè)線長(zhǎng)邊垂直, 振動(dòng)頻率7 Hz。尾鰭距離側(cè)線10 cm, 分布在如圖9所示的12個(gè)點(diǎn), 振動(dòng)方向與側(cè)線長(zhǎng)邊平行, 振動(dòng)頻率1 Hz。小球數(shù)據(jù)每個(gè)位置采集40組, 共160組。每組采集1 024個(gè)點(diǎn)。尾鰭數(shù)據(jù)每個(gè)位置采集25組, 共300組, 每組采集512個(gè)點(diǎn)。
圖10為SVM在不同輸入數(shù)據(jù)下對(duì)小球和尾鰭方位的分類(lèi)結(jié)果, 尾鰭共300組數(shù)據(jù), 其中訓(xùn)練240組, 60組用于測(cè)試。圖10(a)顯示為以側(cè)線原始數(shù)據(jù)的平均能量值作為輸入, SVM的分類(lèi)精度為0.583; 圖10(b)顯示為以側(cè)線的EMD分解第1分量的平均能量值作為輸入, SVM的分類(lèi)精度為0.683; 圖10(c)顯示為以側(cè)線的EMD分解的前3個(gè)分量的能量值合并作為輸入, SVM的分類(lèi)精度為0.917。
圖9 數(shù)據(jù)采集方式
小球共160組數(shù)據(jù), 其中120用于訓(xùn)練, 40組用于測(cè)試, 圖10(d)~(f)為以側(cè)線原始數(shù)據(jù), EMD第1分量, EMD前3分量的平均能量值作為輸入, SVM分類(lèi)精度均為1.000。
通過(guò)實(shí)驗(yàn)發(fā)現(xiàn), 針對(duì)其他目標(biāo)運(yùn)動(dòng)頻率下的ALL目標(biāo)方位辨識(shí)結(jié)果與文中所述規(guī)律基本一致。
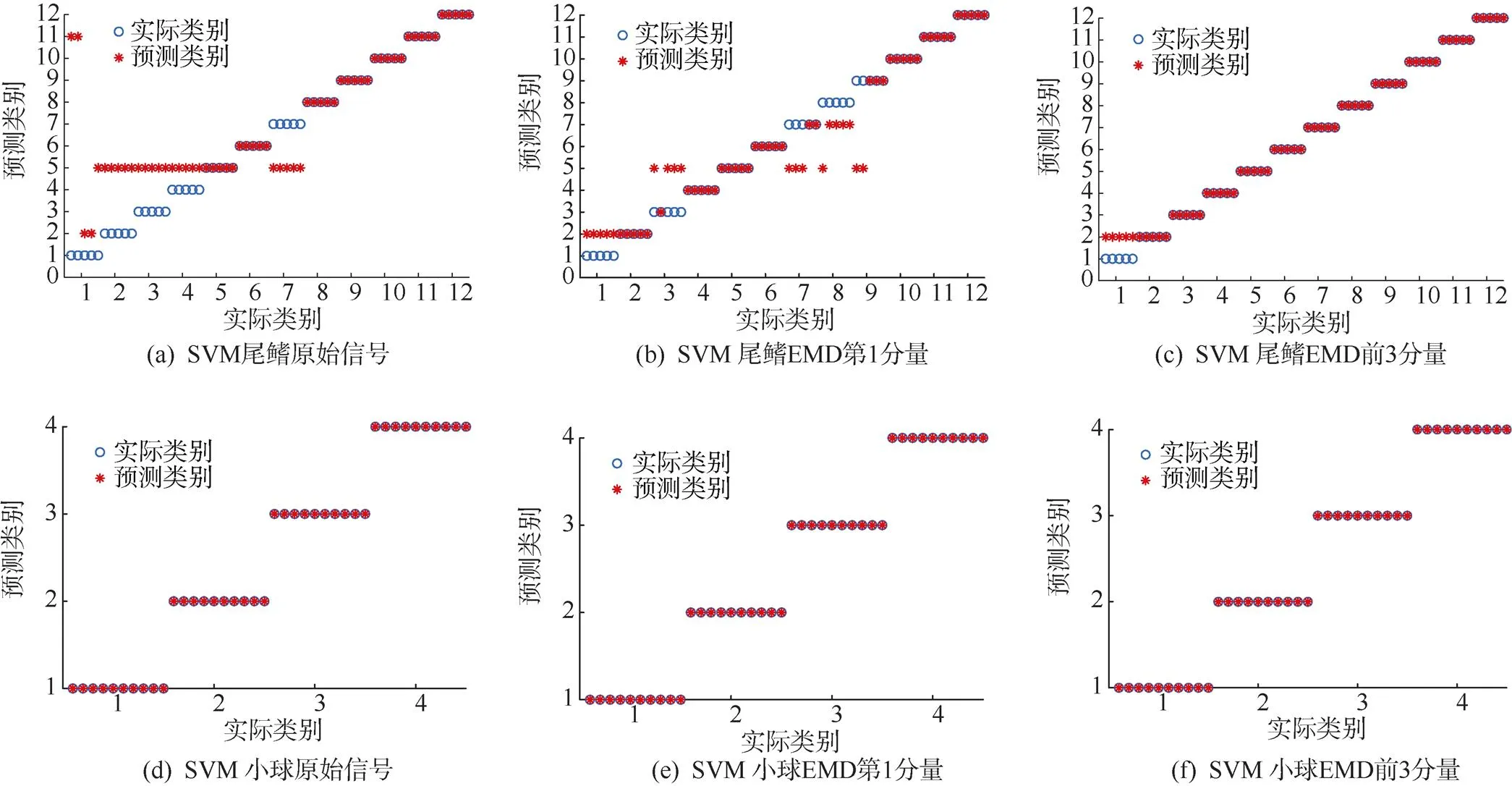
圖10 支持向量機(jī)目標(biāo)方位分類(lèi)結(jié)果
表1和表2為采用原始數(shù)據(jù)和EMD前3分量輸入時(shí), SVM和逆向傳播(back propagation, BP)神經(jīng)網(wǎng)絡(luò)2種算法在不同訓(xùn)練測(cè)試樣本比(每組)下的分類(lèi)性能對(duì)比。
可以看出, 通過(guò)EMD提取目標(biāo)運(yùn)動(dòng)的非線性本征特征后, 基于BP識(shí)別方法的分類(lèi)性能提升不明顯, 而基于SVM識(shí)別方法的分類(lèi)準(zhǔn)確率提升30%左右, 特別是在5/20小樣本情況下, SVM方法的識(shí)別精度比BP方法高近50%, 顯示出很大的優(yōu)越性。
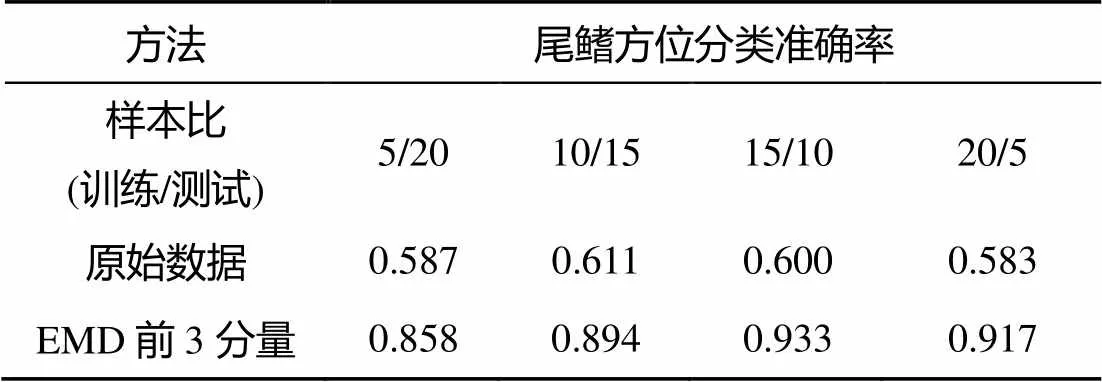
表1 SVM分類(lèi)準(zhǔn)確率
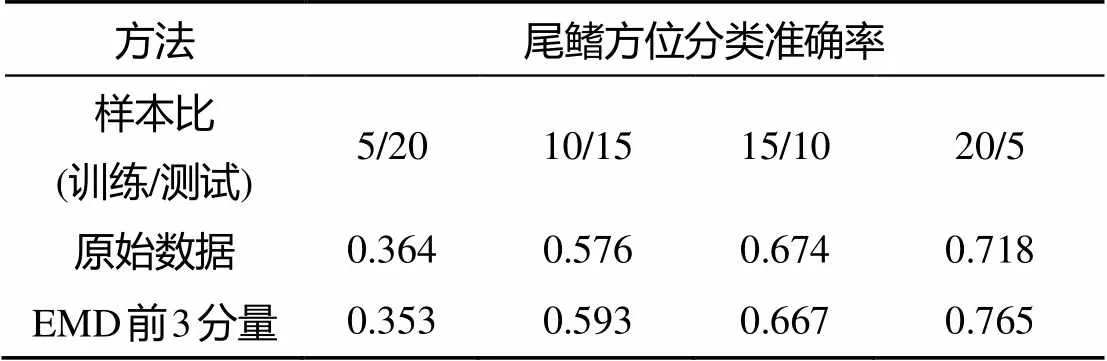
表2 BP神經(jīng)網(wǎng)絡(luò)分類(lèi)準(zhǔn)確率
4 結(jié)論
文中提出一種基于ALL的水下運(yùn)動(dòng)目標(biāo)智能探測(cè)方法, 并進(jìn)行了水池實(shí)驗(yàn)驗(yàn)證,得到以下結(jié)論。
1) 根據(jù)第3部分實(shí)驗(yàn)分析可以看出, EMD分解對(duì)于環(huán)境噪聲較大的情況下, 能夠有效地從原始信號(hào)中進(jìn)行有用信息的提取, 從而實(shí)現(xiàn)運(yùn)動(dòng)目標(biāo)本征特征的獲取。同時(shí), 側(cè)線系統(tǒng)對(duì)于不同頻率和距離的目標(biāo)具有較好的探測(cè)效果, 這為基于側(cè)線系統(tǒng)進(jìn)行水下運(yùn)動(dòng)目標(biāo)的探測(cè)提供了一種可行的方法。
2) 根據(jù)第4部分實(shí)驗(yàn)中, 由于小球4個(gè)特征點(diǎn)位置間隔較遠(yuǎn), 特征相差明顯, 因此SVM分類(lèi)效果非常好。而在尾鰭分類(lèi)中, 由于特征位置較多, 同時(shí)樣本數(shù)較少, 因此分類(lèi)性能較差。同時(shí)可以看出EMD分解之后, 將目標(biāo)信號(hào)的本征特征進(jìn)行提取, 從而反映出信號(hào)內(nèi)在函數(shù)特征, 因此采用EMD分解后的信息作為輸入效果優(yōu)于原始信號(hào)。
3) 根據(jù)第4部分中SVM和BP算法的對(duì)比可以看出, SVM在不同訓(xùn)練/測(cè)試比下性能較穩(wěn)定, 而B(niǎo)P算法受訓(xùn)練樣本數(shù)影響較大。特別是當(dāng)訓(xùn)練樣本數(shù)較少時(shí), SVM性能優(yōu)于BP算法, 這說(shuō)明SVM更適合于小樣本情況下的分類(lèi)識(shí)別。同時(shí), EMD分解的本征模式提取對(duì)BP算法的性能影響較小, 而對(duì)SVM分類(lèi)性能提高顯著, 這說(shuō)明SVM對(duì)于本征信號(hào)更為敏感。在SVM分類(lèi)中20/5的性能相對(duì)于15/10有所下降, 分析原因可能是SVM產(chǎn)生了過(guò)擬合現(xiàn)象, 從而導(dǎo)致性能降低。
下一步的工作計(jì)劃針對(duì)側(cè)線結(jié)構(gòu)進(jìn)行優(yōu)化設(shè)計(jì), 同時(shí)采用新型材料制作側(cè)線傳感器單元, 并將陣列信號(hào)處理與深度學(xué)習(xí)相結(jié)合對(duì)水下目標(biāo)進(jìn)行更精確和高效的探測(cè)。
[1] Du R, Li Z, Youcef-Toumi K, et al. Robot Fish: Bioinspired Fishlike Underwater Robots[J]. ?Underwater Technology, 2017, 34(3): 143-145.
[2] Bleckmann H, Zelick R. Lateral Line System of Fish[J]. Integrative Zoology, 2006, 25(1): 411-453.
[3] Olt J, Stuart L J, Marcotti W. In Vivo and in Vitro Bio- physical Properties of Hair Cells From the Lateral Line and Inner Ear of Developing and Adult Zebrafish[J]. The Journal of Physiology, 2014, 592(10): 2041-2058.
[4] Dabiri J O. Biomechanics: How Fish Feel the Flow[J]. Nature, 2017, 547(7664): 406-407.
[5] Oteiza P, Odstrcil I, Lauder G, et al. A Novel Mechanism for Mechanosensory-based Rheotaxis in Larval Zebrafish[J]. Nature, 2017, 547(7664): 445.
[6] Wang W, Li Y, Zhang X, et al. Speed Evaluation of a Freely Swimming Robotic Fish with an Artificial Lateral Line[C]//IEEE International Conference on Robotics and Automation. Stockholm, Sweden: IEEE, 2016.
[7] Ahrari A, Lei H, Sharif M, et al. Reliable Underwater Dipole Source Characterization in Three-dimensional Space by an Optimally Designed Artificial Lateral Line System[J]. Bioinspiration & Biomimetics, 2017, 12(3): 036010.
[8] Dagamseh A M K, Lammerink T S J, Kolster M L, et al. Dipole-source Localization Using Biomimetic Flow-sensor Arrays Positioned as Lateral-line System[J]. Sensors & Actuators A Physical, 2010, 162(2): 355-360.
[9] Abdulsadda A T, Tan X. Underwater Source Localization Using an IPMC-based Artificial Lateral Line[C]//IEEE International Conference on Robotics and Automation. Shanghai, China: IEEE, 2011: 2719-2724.
[10] Ahrari A, Lei H, Sharif M A, et al. Design Optimization of an Artificial Lateral Line System Incorporating Flow and Sensor Uncertainties[J]. Engineering Optimization, 2016, 49(2): 328-344.
[11] Kottapalli A G P, Asadnia M, Triantafyllou M S, et al. Biomimetic Microsensors Inspired by Marine Life[M]. Switzerland: Springer, 2017.
[12] Huang N E , Shen Z , Long S R , et al. The Empirical Mode Decomposition and the Hilbert Spectrum for Nonlinear and Non-stationary Time Series Analysis[J]. Proceedings A, 1998, 454(1971): 903-995.
Intelligent Detection of Artificial Lateral Line for Biomimetic Robotic Fish Based on EMD and SVM
LIU Yu1, 3, HU Qiao1, 2, 3, ZHAO Zhen-yi1, 2, WEI Chang1, 2
(1. School of Mechanical Engineering, Xi’an Jiao Tong University, Xi’an 710049, China; 2. State Key Laboratory of Manufacturing Systems Engineering, Xi’an Jiao Tong University, Xi’an 710049, China; 3. Shaanxi Key Laboratory of Intelligent Robots, Xi’an Jiao Tong University, Xi’an 710049, China)
In view of the problems that underwater acoustic perception and information interaction system are often disturbed by reverberation or multipath effects, and the optical sensing is easily affected by water turbidity, a novel intelligent detection method of underwater moving target based on artificial lateral line(ALL) is proposed to accurately detect target in complicated underwater interferences for a biomimetic robotic fish. Firstly, the original signals received by the ALL system are decomposed into different intrinsic mode functions(IMFs) via empirical mode decomposition(EMD) to separate target signal from interferences. Secondly, the characteristic frequency of the vibrating target representing different fish is obtained from the IMFs to detect the underwater moving target. Finally, the power spectrums of the IMFs are input into the support vector machines(SVMs) to recognize the azimuth of underwater moving target intelligently. Water tank tests with combination of the proposed method with ALL detection are conducted, and the results show that the proposed method has better detection performance than the traditional methods, such as fast Fourier transform(FFT) and neural network.
biomimetic robotic fish; artificial lateral line(ALL);empirical mode decomposition(EMD); support vector machine(SVM); intelligent detection
TP242; TB566
A
1673-1948(2019)02-0174-07
10.11993/j.issn.1673-1948.2019.02.008
劉鈺, 胡橋, 趙振軼, 等. 基于EMD與SVM的仿生機(jī)器魚(yú)人工側(cè)線智能探測(cè)方法[J]. 水下無(wú)人系統(tǒng)學(xué)報(bào), 2019, 27(2): 174-180.
2016-11-19;
2016-12-18.
國(guó)家自然科學(xué)基金重大項(xiàng)目(61890961); 裝備預(yù)研領(lǐng)域基金項(xiàng)目(61404160503); 中央高校基本科研業(yè)務(wù)費(fèi)(國(guó)防重大項(xiàng)目培育xjjgf2018005); 陜西省重點(diǎn)研發(fā)計(jì)劃重點(diǎn)項(xiàng)目資助(2018ZDXM-GY-111).
劉 鈺(1994-), 男, 在讀博士, 主要研究方向?yàn)樗路律悄芨兄?
(責(zé)任編輯: 許 妍)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46
