DARPA2潛艇模型非定常流動粘性流場和水動力計算
2019-05-16 11:35:50于向陽姚凌虹孟慶昌劉巨斌張志宏
艦船科學技術 2019年4期
于向陽,姚凌虹,孟慶昌,劉巨斌,張志宏
(1. 海軍航空大學青島校區,山東 青島 266000;2. 海軍工程大學,湖北 武漢 430033)
0 引 言
潛艇水下操縱性能研究,與潛艇的安全航行密切相關,是其進行戰術機動的重要保證,同時有著直接的作戰應用背景。實際航行中的潛艇是一種復雜運動的組合體。一方面,其高速、大攻角及強機動的運動特征,使其呈現出非定常性與強非線性;另一方面,潛艇作有攻角機動時,即使攻角保持不變,由于邊界層分離產生漩渦,流動仍然會呈現出非定常特征。這就給理論和試驗研究帶來了很大的困難,采用數值模擬是切實可行的研究方法[1–3]。
本文以DARPA2潛艇模型為研究對象,采用基于非結構化網格的有限體積法,數值求解非定常、不可壓縮的RANS方程,湍流模型采用SA模式,在SA模式中,速度-壓力耦合SIMPLE方法處理,對流項采用2階迎風格式,非定常項采用2階精度離散,隱式迭代求解方程組,非穩態迭代時間步長=2.322 4×10–3s(無量綱時間步長=3.73×10–2),步進200歩,非穩態流場速度由UDF給定,得到非定常粘性流場和水動力數值計算結果,并與文獻[1]的實驗結果進行對比。
1 數值離散方法
采用CFD軟件數值求解DARPA2潛艇模型粘性流場和水動力,采用基于非結構化網格的有限體積法,數值求解非定常、不可壓縮的RANS方程。
湍流模型采用SA模式,在SA模式中,生成項所采用的形式為:

速度-壓力耦合采用SIMPLE方法處理,對流項采用2階迎風格式,非定常項采用2階精度離散,隱式迭代求解方程組。計算雷諾數Re=5.52×106,初值收斂準則為所有求解變量的無量綱殘差下降4個量級,非穩態迭代時間步長=2.322 4×10–3s(無量綱時間步長=3.73×10–2),步進200歩,模型的運動狀態由UDF定義。
1.1 計算模型
計算對象為DARPA2潛艇模型(見圖1),模型主要參數如表1所示,包括艇主體、指揮臺圍殼、尾附體。數值計算在慣性坐標系中進行,采用直角坐標系,原點取在模型頭部頂端,x軸與艇體的對稱軸重合,方向與無攻角時來流方向一致,z軸豎直向上,y軸水平,計算時直角坐標系保持為模型處于零攻角時的位置,當模型作操縱運動時,坐標不變,而模型與坐標系產生相對運動;在所定義的坐標系下, 規定來流的z方向速度分量正時為正攻角,初始攻角為0°。

圖 1 全附體DARPA2模型Fig. 1 DARPA2 submarine model with sail and stern appendages mounted
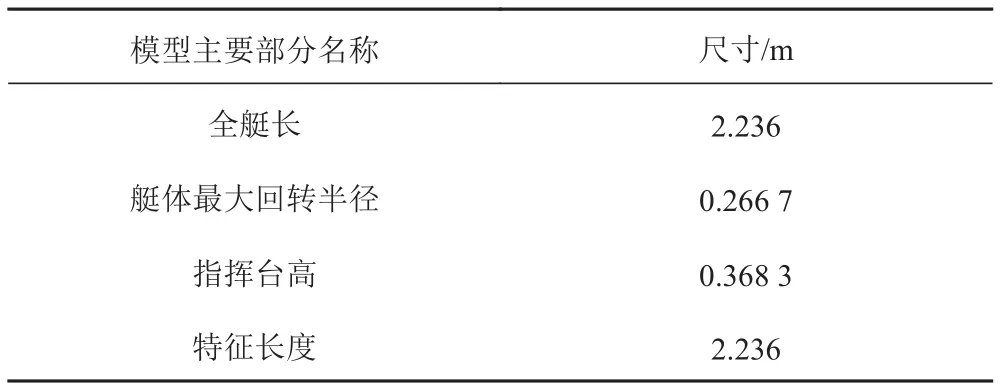
表 1 DARPA2潛艇模型主要參數Tab. 1 DARPA2 model scale
考慮到模型本身的對稱性,同時操縱運動僅為xz面內的非定常回轉運動,在不影響數值計算的準確性前提下,僅對半艇體流動進行數值計算,以減少計算量;計算域為半圓柱體區域,范圍:–2.0≤x/L≤5.2,–2≤z/L≤2,0≤y/L≤2,其中 L為艇體長度,L=2.236 m,計算域如圖2所示。

圖 2 模型的邊界條件設置Fig. 2 Boundary setting of the computational domain
1.2 邊界條件
邊界條件設置可分為初始流場狀態和非穩態運動狀態2個階段。
初始邊界條件(見圖2):半圓柱體的左半圓面AEB(x/L=–2.0處)定義為速度入口,給定速度大小和方向;半圓柱體的右半圓面DFC(x/L=5.2處)定義為壓力出口;半圓柱面的上、下兩部分(EBCF/AEFD),及主體、指揮臺圍殼、尾附體,定義為無滑移壁面,速度分量和湍動能為0,以加速收斂,獲得較好的初值;對稱面上,法向速度分量為0,平行于對稱面的速度分量的法向導數和所有標量的法向導數為0;初始攻角為0。
非穩態時模型作操縱運動,攻角發生改變,變化范圍由0°~–25°,須調整邊界條件,以適應運動狀態的變化,此時定義半圓柱面的上半部分EBCF(z>0)為速度入口;半圓柱面的下半部分AEFD(z≤0)為壓力出口,考慮到在迭代過程中,有可能存在數值上的反向流動,設置出口回流方向的方式為垂直于出口面;由于采用慣性坐標系,體網格是運動的,定義體網格和物面旋轉中心(0.659 62,0,0)和旋轉軸y軸,角速度由UDF定義。角速度曲線,具體描述如如圖3及表2所示(實驗數據來自文獻[1])。
1.3 網格設置
體網格采用基于四面體的非結構化網格形式,邊界層網格進行加密處理,網格密度由模型表面至遠場由密到疏分布。

圖 3 角速度ω隨時間變化曲線Fig. 3 ω vs. time
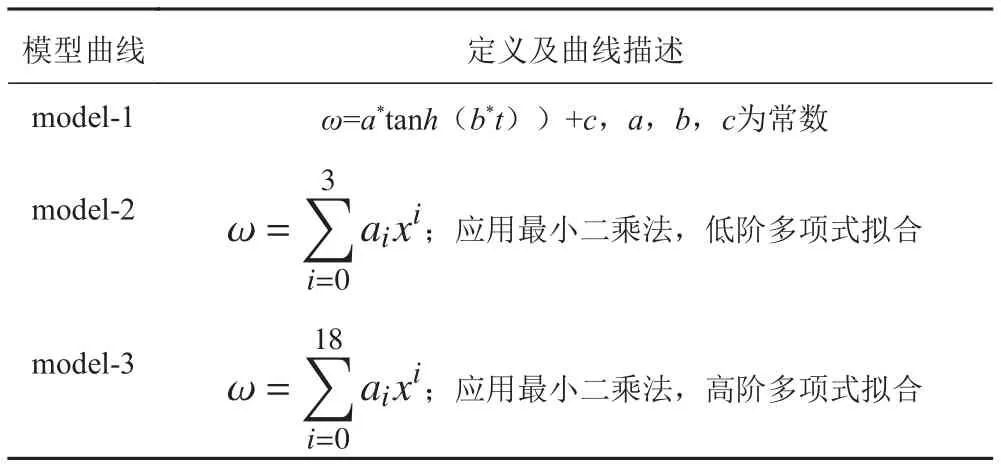
表 2 不同模型的角速度函數Tab. 2 The function of ω for different model

表 3 網格主要參數Tab. 3 The grids for simulation
考慮到對模型進行非穩態運動模擬時,網格動態變化,網格需要均勻銜接,以避免網格的奇異變化導致迭代不收斂。
2 動態邊界處理
本文中應用動網格技術處理含有動態邊界問題的非穩態運動狀態,邊界運動由UDF定義。
2.1 UDF編寫
用戶自定義函數UDF(User-Defined Function)是CFD軟件提供的一個用戶接口,使用者可以通過它與CFD軟件的內部數據進行交流,方便用戶解決一些標準的CFD軟件模塊不能解決的問題[4–6]。

圖 4 攻角–25°物面(model-1)Fig. 4 for the wall at –25° (model-1)
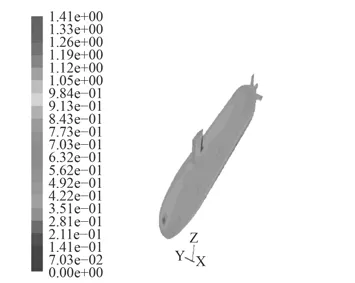
圖 5 攻角–25°物面 (model-2)Fig. 5 for the wall at –25° (model-2)
本文考慮到非穩態問題的復雜性,以及計算機本身的運行環境(已安裝Visual Studio C++ 開發軟件),采用編譯的UDF定義其運動(非穩態場的角速度函數),以提高執行速度[7]。
2.2 網格更新
動網格模型,即在每一個時間歩迭代之前,根據邊界或物體的運動和變形來更新和重新構建計算域網格,從而達到求解非定常問題的目的[8–10]。而邊界的形變和運動由UDF加以定義。計算中的網格更新情況如圖6所示。
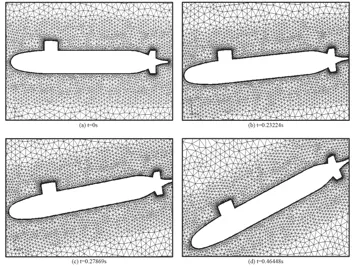
圖 6 網格更新示意圖(model-1)Fig. 6 The view of mesh motion (model-1)
由圖6可知,艇體和附體的物面邊界層都參與了網格的重構過程,網格質量沒有受到影響,網格更新過程中沒有負體積和大長寬比網格出現,從而保證了數值迭代的延續。
3 初始流場計算
為了得到較好的非定常結果,需要對初始流場進行討論。本文中非定常因素,一方面,大攻角時,分離流動導致伴隨渦的出現;另一方面,給定的模型運動狀態,即角速度的定義本身就是隨時間變化的函數。圖7給出不同計算參數和邊界條件下的初始流場變量收斂曲線。最初,分析初始時刻時,沒有過多地考慮零攻角的流場特征,將邊界條件半圓柱面的上、下兩部分(EBCF/AEFD)分別定義為壓力出口和速度出口,在迭代過程中流場變量波動起伏,近似周期性變化,但收斂精度未達到要求,如圖7(a)所示;分析上述收斂精度持續不下的情況,可能是松弛因子過大的原因,將部分松弛因子降低30%,流場變量的波動情況消失,但收斂精度未出現改觀,如圖7(b)所示;觀察到速度分量殘差未發生變化,追溯根源,可能是邊界條件有待優化,在圖7(a)所定義的邊界條件的基礎上,將半圓柱面的上、下兩部分(EBCF/AEFD)分別定義為無滑移壁面,速度分量殘差迅速收斂,如圖7(c)所示;圖7(d)再次調整部分松弛因子,流場變量在925次迭代后達到收斂精度。
4 時間步長選取
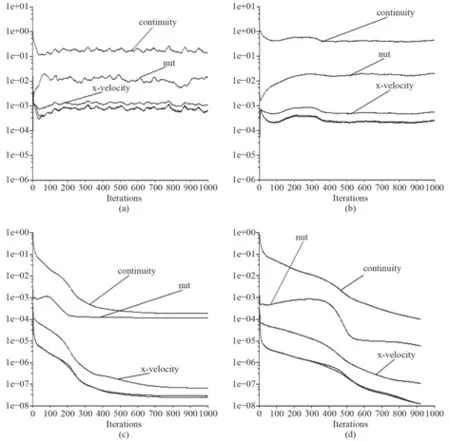
圖 7 初始流場變量收斂歷史Fig. 7 Convergence history of flowfied variables
初始流場由零攻角定常結果給出,進行非定常計算時需給定時間步長。依據文獻[1]中的模型實驗,給定角速度隨無量綱時間t'的變化關系如圖8所示,無量綱時間定義為,無量綱時間取值范圍0~7.463 7時,對應的有量綱時間為0~0.464 48,計算時采用有量綱時間進行計算,非定常攻角范圍0~–25°,考慮到時間步長對數值計算結果的影響,認為10–3s數量級已滿足計算精度的要求。
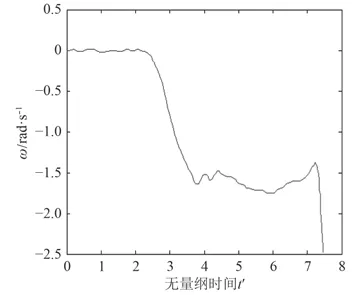
圖 8 角速度ω(rad/s)隨無量綱時間變化曲線Fig. 8 ω(rad/s) vs. non-dimensional time
5 計算結果分析
應用表2中的3種模型曲線,對模型運動進行定義。初始化流場后,進行非定常數值模擬。
為追求曲線擬合的精確性,采用最小二乘法高階多項式擬合實驗數據,如圖3(model-3)所示,當n=18時,除波動較復雜的拐點處略有差別外,整條曲線基本重合;但進行非定常數值計算時,角速度給定值持續增加,在不到100歩的迭代過程中,迭代時間不到半數,殘差竟迅速增至102數量級,超出預定值近100倍,最后導致計算結果發散。分析原因,認為是時間精度不夠的原因,將時間步長下降一個量級后,結果仍舊如前所述。嘗試時間步長的一味降低,勢必導致計算量的增大。
重新分析計算結果發散的原因,非穩態問題本身需要進行空間和時間的離散,變量之間的耦合關系將導致非線性增強,同時高階曲線擬合容易造成較大的截斷誤差,綜合上述原因,應用model-2,降低多項式階次擬合實驗數據,以驗證是否是截斷誤差過大導致結果發散;非定常結果穩定,且角速度按給定值正常迭代。
但model-2對實驗數據擬合效果不夠理想,需要尋找其他函數,進行數值計算。本例采用model-1對實驗數據進行擬合,同時略去角速度變化較大的尾端,擬合效果較好,數值計算結果穩定。
5.1 水動力分析
圖9給出了模型進行非定常數值計算時,升力系數CL隨時間的變化情況。圖中曲線unsteady,Quais-Steady+Time Lag和Quais-Steady為文獻[1]中的實驗結果,曲線unsteady為某一次非定常試驗結果,Quais-Steady+Time Lag為20次非定常試驗結果的平均值,Quais-Steady為準定常狀態下的試驗結果。

圖 9 升力系數與時間的關系Fig. 9 Normal force development against time
從圖中可以看到,定義相同的運動狀態,unsteady的升力系數卻表現出較強的不確定性,Quais-Steady+Time Lag曲線在描述unsteady曲線時符合程度也存在較大的偏差。分析上述問題產生的原因(參考圖3),本文在對實驗所定義的運動曲線的模擬上也存在局限性;同時,不得不指出非定常試驗本身所具有的不確定性因素,如風洞中溫度、風速的變化、及氣流對操縱運動裝置的影響(易使模型發生振動)等,隨著時間的變化,流場中物理量的變化容易受到這些不確定因素的影響。
比較2種模型的數值計算結果,升力系數隨時間變化平穩,在前0.25 s與實驗值符合較好;模型model-1對升力系數的計算值在中間段(0.15~0.25 s)有較明顯的減小過程(參考圖3),這與model-1所定義的角速度曲線在中間段有一個負向加速過程相對應;模型model-2在初始階段,升力系數由正轉負,是與其所定義的角速度值在初始階段大于0相一致的;要取得與實驗一致的模擬效果,由實驗中的不確定因素產生的誤差需要加以考慮。
5.2 粘性流場分析
圖10~圖13給出了分別采用2種模型得到攻角–25°時物面壓強系數和物面切應力系數的數值計算結果,兩者在物面上的連貫性和均勻性均較好,在迎風處出現極值,這與理論上此處對應速度的最小值是相符合的。與定常攻角–25°(見圖14和圖15)時的結果相比,在變化趨勢和數值分布上一致。
圖16給出了攻角–25°時x/L=0.863截面速度向量圖(model-1),在背風面可以清晰地看到有分離渦出現,反映了流場的粘性分離特性。
6 結 語
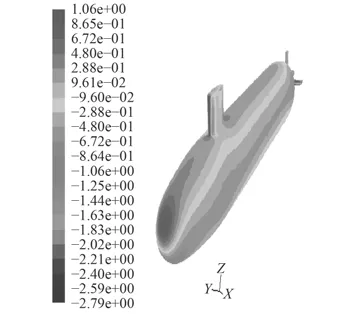
圖 10 攻角–25°物面壓強系數(mode-l)Fig. 10 Surface pressure cofficient at –25° (mode-2)
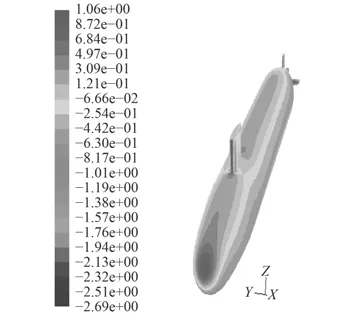
圖 11 攻角–25°物面壓強系數(mode-2)Fig. 11 Surface pressure cofficient at –25° (mode-1)
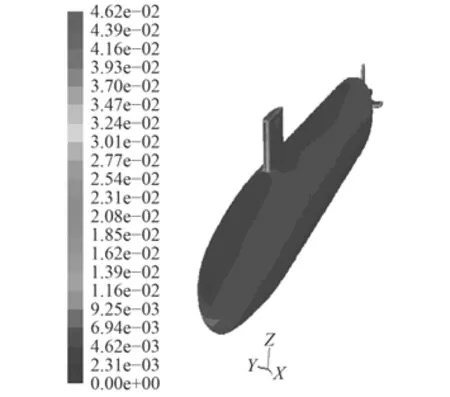
圖 12 攻角–25°物面剪切力系數(mode-l)Fig. 12 Surface friction cofficient at –25° (mode-l)
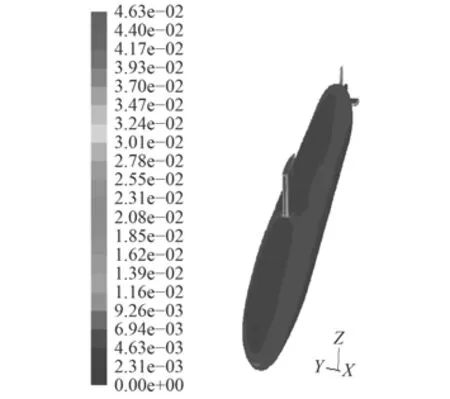
圖 13 攻角–25°物面剪切力系數(mode-2)Fig. 13 Surface friction cofficient at –25° (mode-2)

圖 14 攻角–25°物面壓強系數Fig. 14 Surface pressure cofficient at –25°
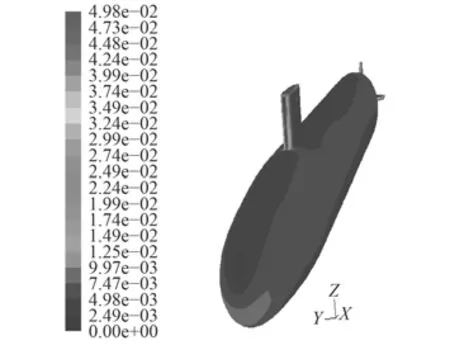
圖 15 攻角–25°物面切應力系數Fig. 15 Surface friction cofficient at –25°
采用CFD軟件數值求解非定常的DARPA2潛艇模型粘性流場和水動力,采用基于非結構化網格的有限體積法,數值求解非定常、不可壓縮的RANS方程,湍流模型采用SA模式,在SA模式中,速度-壓力耦合采用SIMPLE方法處理,對流項采用2階迎風格式,非定常項采用2階精度離散,隱式迭代求解方程組,非穩態迭代時間步長=2.322 4×10–3s(無量綱時間步長=3.73×10–2),步進200歩,非穩態流場速度由UDF給定。采用編譯的UDF定義其運動(非穩態場的角速度函數)。
為了得到較好的非定常結果,需要對初始流場進行討論。通過調整邊界條件和部分松弛因子,初始流場變量在925次迭代后達到收斂精度。
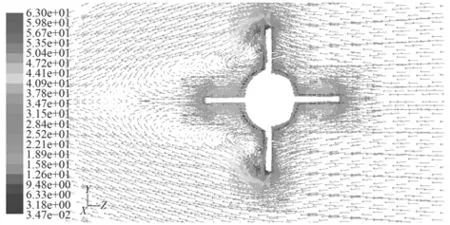
圖 16 攻角–25°時x/L=0.863截面速度向量圖Fig. 16 Velocity vector diagram at x/L=0.863 section and –25°angle of attack against time
在初始流場穩定的基礎上,應用表2中的3種模型曲線,分別定義運動狀態,進行非定常數值模擬。過分追求曲線擬合的精確性,采用高階多項式擬合實驗數據導致將計算結果發散;降低多項式階次,得到穩定的非定常結果;采用model-1對實驗數據進行擬合,擬合效果較好,數值計算結果穩定。
要取得與實驗一致的模擬效果,由實驗中的不確定因素產生的誤差需要加以考慮。攻角–25°時物面壓強系數和物面切應力系數的數值計算結果,在壁面上的連貫性和均勻性均較好,與定常攻角–25°時的結果在變化趨勢和數值分布上一致。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
海峽姐妹(2020年9期)2021-01-04 01:35:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
VOGUE服飾與美容(2020年9期)2020-09-02 14:47:26
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
山東青年(2016年1期)2016-02-28 14:25:25
核科學與工程(2015年4期)2015-09-26 11:59:03
當代修辭學(2014年3期)2014-01-21 02:30:44
公務員文萃(2013年5期)2013-03-11 16:08:37