水下矢量推進器研究綜述
2019-05-16 11:35:48肖晶晶
艦船科學技術 2019年4期
張 帥,肖晶晶
(廈門大學 航空航天學院,福建 廈門 361102)
0 引 言
海洋屬于國家非常重要的戰略資源,在生存資源日益枯竭的當下,海洋資源顯得尤為重要。而船舶和潛水器是開發水下資源的排頭兵,對于船舶和潛水器來說,操縱性和機動性是非常重要的指標。
推力矢量技術概念來源于飛行器設計技術,飛行器的推進系統除了在直線方向提供推力外,還能同時或者單獨在運動物體的俯仰、偏航、橫滾等其他方向上提供推力,即推力的矢量化。隨著時代的發展,人們越來越重視水下推進技術的研發,將矢量推進技術應用于水下,可有效提高船舶及潛水器的機動性和操縱性,具有矢量推進技術的水下推進器稱為水下矢量推進器。
水下矢量推進器不僅在海洋資源探索方面意義重大,在軍事、科考等方面同樣具有非常重要的現實意義。隨著近年來仿生推進、磁流體推進等推進方式的發展,水下推進方式呈現出多元化、多樣化的發展趨勢。但是鑒于技術發展的時間較短,新興的推進方式無法較好地克服自身的不足,比如仿生推進具有高度的機動性能和高效的推進效率,但是目前的技術難度較大,較難應用于大型的潛水器;磁流體推進方式擁有出眾的靜音效果,但是目前技術不夠成熟、建設成本太高、航行速度太慢等原因同樣影響其大規模應用。
目前主流的水下矢量推進器的推進方式是螺旋槳式和噴水式,而其中又以螺旋槳式應用最為廣泛,本文針對這2種方式進行綜述,其基本分類框架如表1所示。
1 螺旋槳式矢量推進器
螺旋槳式矢量推進器主要分為傳統螺旋槳式、變矢量螺旋槳式、并聯式、串聯式和吊艙式等。

表 1 水下矢量推進器的主要分類及特點Tab. 1 Main classifications and features of underwater vector propulsion devices
1.1 傳統螺旋槳式矢量推進器
傳統螺旋槳式矢量推進技術主要應用于自主式潛航器,這種推進方式是在水下潛器的周圍布置多個固定螺旋槳或者固定螺旋槳和二元矢量螺旋槳搭配式組合,每個固定螺旋槳只能進行自旋運動,每個二元矢量螺旋槳既可以自旋又可以進行偏擺或回轉運動。如圖1所示,該水下潛器是由麻省理工學院研制的1臺AUV,在其前后左右均有1個固定的螺旋槳,從而可以控制其幾個方向的運動。但是由于其非流線型并且所使用的部分固定螺旋槳的利用率不高,所以其局限性較大[1]。
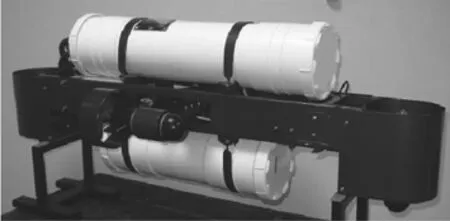
圖 1 麻省理工大學的 AUVFig. 1 AUV designed by MIT
我國自主設計建造的潛水器 “蛟龍”號采用的是固定螺旋槳和二元矢量螺旋槳組合矢量方式,其擁有4個固定管道槳、2個旋轉管道槳以及1個槽道槳。通過操作控制系統,能夠讓載人潛水器擁有實現六自由度的空間運動能力[2]。
傳統的螺旋槳式矢量推進器使用堆積組合螺旋槳數量的方式來實現水下潛器的六自由度運動。該種方式的優點是實用性、高效性,沒有復雜的傳動系統,矢量推進方式較簡單,缺點是由于潛水器外部需要布置多個螺旋槳,整個潛水器的外形結構更加復雜、水動力性能降低。
1.2 變矢量螺旋槳推進器
變矢量螺旋槳推進器又稱為全方位螺旋槳推進器,它是一種在槳葉旋轉一周的過程中,葉片螺距角作周期性變化的特種推進器,不同于其他螺旋槳推進器,其最大的特點是在螺旋槳槳葉旋轉的過程中,通過控制葉片螺距角的周期性變化,從而能夠產生上下、前后、左右6個方向的推力[3]。
全方位螺旋槳推進器最早出現在1961年美國人F.R.Haselton發明的潛艇上,當時這個系統在潛艇前后方將2個同樣的全方位推進器串聯安裝,構成了潛艇的推進系統,通過前后槳的反向旋轉可以發出任何方向的推力和轉矩。1987年,美國制造商AMETEK Straza Division發表了1篇裝配全方位推進器的載人潛水器的報道。不久,G.M.Stenovec等發表了將F.R.Haselton的發明裝配到潛水器上的文章[4]。
日本研究人員在20世紀80年代進行模型試驗,并發表了試驗結果和基于準定常理論的數學計算模型,此后日本將這種推進器應用于潛水器和水下機器人,取得了較為明顯的效果。
迄今為止,國內對全方位推進器的研究大多數停留在水動力性能計算方面。黃勝[5]對螺距調節式全方位推進器的研究取得了初創性的成果,研究工作體現在對螺距調解式全方位推進器的工作原理和水動力性能預報方法進行了研究,對螺距調解式全方位推進器水動力性能進行了計算,所得到的計算結果與日本相關方面的實驗結果吻合良好[6-7]。
通過使用全方向推進器可以減少動力系統的傳動部件,增加潛水器的操縱性、機動性,減少潛水器的重量和體積,改善潛水器的結構強度以及潛器內部的總布置,降低噪聲并節約能量,因此具有重大的應用價值。
1.3 矢量螺旋槳推進器
以下矢量螺旋槳推進器均是使用單個螺旋槳,利用一些傳動系統等附加的機械機構,通過改變螺旋槳的方向來實現矢量推力的示例。
1.3.1 并聯式矢量螺旋槳推進器
并聯機構簡稱PM,其特點是動平臺和定平臺通過至少2個獨立的運動鏈相連接,機構具有2個或2個以上自由度,且以并聯方式驅動。
1)雙控制臂矢量推進器
圖2為基于球齒輪柔性軸的矢量螺旋槳推進器,其主要以1個主驅動電機和2個直線電機作為動力源,核心部分是由球齒輪和萬向節組成的柔性軸,該柔性軸能夠滿足向各個方向轉向的要求。主驅動電機是保持螺旋槳在當前姿態下自旋的動力電機,其產生的動力通過一系列的傳動部件最終到達螺旋槳,滿足螺旋槳的轉向轉速需求。2個直線電機在兩側相互配合使得推力環發生偏轉,從而可以使螺旋槳向各個方向偏轉,實現推力方向的改變[8]。

圖 2 主動矢量推進裝置三維圖Fig. 2 Three-dimensional graph of active vector propulsion device
2)三控制臂矢量推進器
圖3為采用3-RPS與SPS組合機構的并聯式矢量推進器。主推電機控制螺旋槳轉速,主推電機的連接軸與螺旋槳連接軸通過萬向節連接,3個作動筒通過球鉸鏈來控制螺旋槳的偏擺,作動筒的驅動是靠內部步進電機驅動絲杠螺母副來實現。當裝置螺旋槳需要做偏擺運動時,3個作動筒相互協調通過絲杠螺母和球機鉸鏈完成角度偏轉[9]。
1.3.2 串聯式矢量螺旋槳推進器
串聯機構特點是若干個單自由度的基本機構順序聯接,每一個前置機構的輸出運動是后置機構的輸入。
1)基于齒輪系串聯式矢量推進器

圖 3 并聯式矢量推進器三維圖Fig. 3 Three-dimensional graph of parallel vector propeller
如圖4所示,該矢量推進器的傳動系統主要是由錐齒輪和直齒輪、傳動軸組成,3個電機構成整個推進器自轉和偏擺的動力源。它主要有滾轉傳動鏈、偏擺傳動鏈、自旋傳動鏈3個傳動鏈。滾轉傳動鏈與偏擺傳動鏈串聯,共同控制螺旋槳的空間位置[10]。
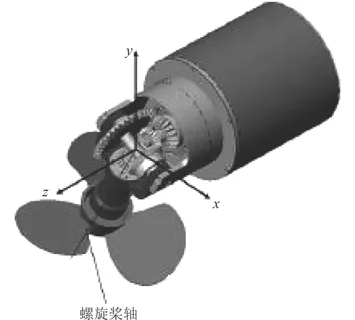
圖 4 基于錐齒輪的矢量推進器機構三維圖Fig. 4 Three-dimensional graph of vector propeller mechanism based on bevel gears
2)直接串聯式矢量螺旋槳推進器
浙江大學設計了一種串聯式的矢量推進裝置,主要由螺旋槳以及3組電機組成,3組電機各自控制上1組電機在1個自由度上的運動,第1組電機的輸出軸水平放置并與螺旋槳連接,第2組電機輸出軸豎直設置并且與第1組電機的殼體固連,第3組電機固定于潛水器的尾部并且與第2組電機的殼體固連。3個電機中后1組電機的輸出端是前1組電機的輸入端,可實現串聯式矢量推進控制[11]。
1.4 吊艙推進器
吊艙推進器由于其巨大的實用性,故單獨將其歸納作為一類水下矢量推進器。吊艙式推進器簡稱POD推進器,由于其較先進的設計理念和全新的推進方式而廣受青睞,其廣泛應用于潛艇、旅游船只、貨運船只、破冰船只等。
吊艙式推進器的原理是把船舶的推進器密封于1個吊艙內,該吊艙內有動力電機和驅動軸并且吊艙可以360°旋轉,這種方式集成了傳統船舶推進裝置的固定動力源和方向舵的功能,把動力裝置和轉向裝置全部集成在船體的外部,節省了大量的空間,有助于船舶的操縱,提高了船舶的靈活性。
正是由于吊艙推進器有著創新性的突破,其受到很多公司和科研工作者的追捧。例如:日本科學家把高溫超導電機利用到吊艙推進器中;加拿大科學家對吊艙推進器裝置進行了詳細的受力分析;美國海軍和MIT進行合作并研發了一種新型的吊艙推進器,并且比較好地完成了當初的設計指標[12 – 13]。超級郵輪 “海洋獨立”號動力系統采用的是吊艙式推進器,其船底前部還有轉向螺旋槳,在轉向螺旋槳和吊艙推進器的共同作用下,巨大的船身擁有非常小的轉彎半徑,可以靈活控制船體位置,因而可以在比較狹小的港口停泊。
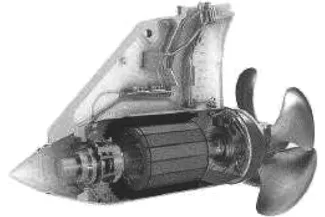
圖 5 吊艙式推進裝置三維圖Fig. 5 Three-dimensional graph of POD propulsion device
2 噴水式矢量推進器
噴水推進器是利用推進泵高速旋轉,產生從進口到出口高速流出的水流,利用作用力與反作用力的原理,產生前進的推力。
噴水推進器相較于螺旋槳推進器,具有更高效的推進效率、更優越的抑噪抑振能力、更好的尾流處理效果、對泵的保護更好等優點,在一些需要高速、高靜音要求、軍用等特殊情況下,噴水推進器有著不可比擬的先天優勢。在20世紀50年代,噴水推進器只是較多地應用在內河低速的船舶上。到了60年代,噴水推進器越來越多地應用在高性能船艇上。在70年代中期,英國第1個將噴水推進器應用于其核潛艇Sovereign號上,美國和法國也相繼在其作戰核潛艇上應用噴水推進裝置[14]。
目前應用較多的噴水矢量推進器大體可以分為兩大類:基于二次射流的矢量推進器;基于可變向噴頭的矢量推進器。
2.1 基于二次射流的矢量推進器
圖6是1種基于橫向二次射流的水下矢量推進器。該設計的主要原理是在主推進器的四周均布數個二次射流裝置,二次射流裝置射流方向與主推進器的射流方向垂直,所以在二次射流的橫向速度的影響下,主射流的流向就會相對應地發生偏轉,通過控制主推進器周圍不同的二次射流的流通速度大小就可以改變主射流的偏轉[15]。
二次射流的方式改變推力的方法沒有推力損失,能夠有效地改變射流方向,但是儲存二次射流需要一定的空間,增大了整個推進器的體積,并且這種方式在實際使用中主射流的偏轉角度有限。

圖 6 基于橫向二次射流的噴水矢量推進器Fig. 6 Waterjet vector thruster based on cross second flow
2.2 基于可變向噴頭的矢量推進器
可變噴頭式矢量推進方式包括單噴頭式和多噴頭式,單噴頭矢量推進器的特點是噴頭可以俯仰和偏擺,1個噴頭就起到了動力推進+舵的作用,而多噴頭矢量推進器往往不能在單一噴頭上既滿足俯仰又滿足偏擺的要求,需要多個低自由度矢量噴頭一起協同運作來滿足多自由度運動的要求。
1)單噴頭矢量推進器
圖7是1種基于3-RPS的矢量噴水推進器,該推進器由3個液壓桿定向調節控制其噴頭的轉向,噴頭的動力源是1個水壓泵裝置,該設計有潛力具備軍事上的高速度、高機動性、聲隱身性等要求[16]。

圖 7 基于 3-RPS 的噴水矢量推進器三維圖Fig. 7 Three-dimensional graph of waterjet vector thruster based on 3-RPS
2)多噴頭矢量噴水推進器
國防科技大學設計了1種水下潛器的矢量推進裝置,在潛器的尾部和兩側分別設置了1個平面矢量推進器,潛器兩側各有1個可以360°旋轉的矢量噴頭。當潛器需要前進后退、升沉或者搖擺時,只需控制兩側和尾部的矢量噴頭即可[17]。
該矢量推進器的缺點是由于3個矢量推進器均是二元的,致使潛器無法直接進行側向移動。
3 發展趨勢分析

圖 8 多噴頭矢量噴水推進器三維圖Fig. 8 Three-dimensional graph of vector thruster based on multi waterjet propulsion
綜上可以發現,螺旋槳式矢量推進方式依然是水下矢量推進方式的主流,而傳統螺旋槳矢量推進方式更是依靠其強大的實用性、可靠性和簡便性,在今后相當長的一段時間內依然將會是潛水器水下矢量推進方式的首選。今后矢量推進方式中將會更多地出現固定螺旋槳、二元矢量螺旋槳、三元矢量螺旋槳三者的混合搭配。變矢量螺旋槳推進方式是1種新型的推進方式,相信在未來會成為替代傳統螺旋槳矢量推進方式的重要力量。噴水推進的矢量化在某些應用中也較廣泛,正逐漸在某些特殊領域替代螺旋槳矢量推進器。
每一種推進器都有各自的優點及缺點,如果能根據其不同的優勢,把其中不同的推進方式結合起來形成一種新矢量推進方式,在不同的工況之下,推進器種類之間能相互配合達到優勢互補,這樣或許會產生意外的效果。隨著仿生推進、磁流體推進等其他推進方式的發展,相信越來越多的2種或者2種以上的混合推進方式也會逐漸被學習和應用。
4 結 語
對于船舶和潛水器來說,操縱性和機動性無疑是一個非常重要的指標,水下矢量推進器的出現就是為了提高船舶和潛水器的操縱性和機動性,提高人類開展深海探索的能力。
本文綜述了螺旋槳式和噴水式水下矢量推進器的分類和實例,由于很多水下矢量推進器設計還未完全產業化,還有些是存在于實驗室或者科研人員的專利和論文中,所以本篇綜述很大部分是對國內外實驗室研究或者是論文構想進行的分類整理和歸納拓展。