掛車轉彎安全預警系統設計研究
2019-05-16 03:48:48王建美WangJianmeiFengLi
北京汽車 2019年2期
王建美,馮 理 Wang Jianmei,Feng Li
?
掛車轉彎安全預警系統設計研究
王建美,馮 理 Wang Jianmei,Feng Li
(武漢華夏理工學院,湖北 武漢 430223)
掛車在城市中轉向行駛時,由于駕駛員存在視野盲區,可能會碰撞到路上的行人、自行車或電動自行車等非機動車人員,設計一套掛車轉彎安全預警系統,能夠在非機動車人員進入掛車轉彎危險區域時及時發出警示信息,避免發生交通事故和人員傷亡。該系統有多個警示裝置,能夠同時提醒汽車駕駛員和非機動車人員,達到雙向雙重預警的目的,提高掛車轉彎安全性。
預警;內輪差;手機移動終端
0 引 言
近年來,掛車保有量逐年增長,事故率也在逐年上升,尤其是掛車轉彎事故逐年增加。掛車由于質量大、慣性大,導致事故中死亡率高達43%。因掛車的交通事故破壞性強、損失大和人員傷亡率高等因素,所以在日常出行中,不管是行人、非機動車輛或是小型機動車輛在道路上遇到掛車時總是畏而遠之[1]。目前并沒有一套成熟的安全預警系統能在掛車轉彎時給予適當警示,這樣的安全預警系統可以減少事故率和人員傷亡。
1 事故原因及防范措施
掛車轉彎事故發生的主要原因是掛車輪胎數量多、體積大,位于車頭的駕駛室比較高,非機動車人員通常在被撞倒之后卷入底盤被壓傷亡。此類轉彎事故大多是由于車輛轉彎時存在內輪差盲區所導致[2]。內輪差是指轉彎時,掛車內前輪與內后輪轉彎半徑之差,前、后車輪轉彎半徑不一致導致前、后輪運動軌跡并不重合,所形成的區域即為內輪差區域,也是駕駛員的視覺盲區,如圖1所示。
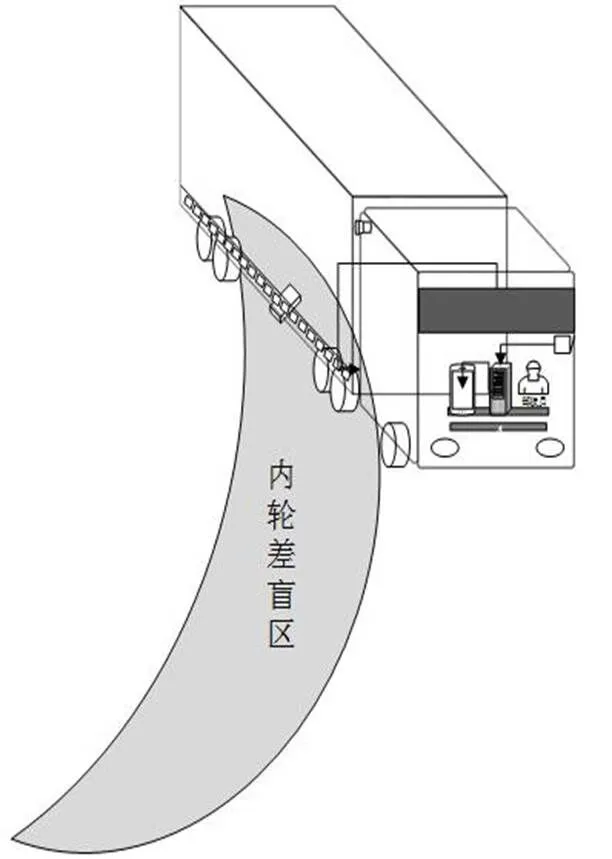
圖1 內輪差區域
西南交通大學設計的大貨車彎道安全警示系統主要包括紅外感應器和LED(Light Emitting Diode,發光二極管)燈等裝置,當貨車轉彎、非機動車人員進入到危險區域時,紅外感應器接收到信息并經處理器計算處理后,LED燈發光并將光亮照在路面上,以提醒非機動車人員此區域危險,應快速避開[3-4]。此系統可以一定程度降低掛車轉彎時的事故發生率;但紅外感應器是其唯一的信號采集器,采集的信號比較單一,如果紅外感應器異常或故障,則警示系統極容易失效或不正常工作;此外,紅外感應器成本偏高,難以在消費群體中推廣[5];因此,掛車轉彎預警系統應多渠道采集車輛轉彎時的外界信號,且能夠快速準確判斷彎道路況,及時計算處理信息并發出預警指令,同時應避免過高的成本。
2 預警系統技術方案
掛車轉彎安全預警系統主要由控制開關、信息采集模塊、信息計算與處理模塊和安全預警裝置等組成。其控制開關為轉向燈控制開關,信息采集模塊包括毫米波雷達、廣角攝像頭和GPS(Global Positioning System,全球定位系統),信息計算與處理模塊主要為ECU(Electronic Control Unit,電子控制單元)和中央服務器,安全預警裝置主要包括LED軟光帶、蜂鳴器和移動手機終端。其技術特點是將掛車轉彎時的內輪差盲區通過LED軟光帶動態閃爍可視化,以此警示行人或非機動車駕駛人,駕駛室內蜂鳴器鳴笛以警示駕駛員,同時通過移動手機終端分別發送語音信號給駕駛員和處于危險區域的行人或其他車輛駕駛員,雙重預警行人和駕駛員,避免因轉彎內輪差盲區而發生交通事故。預警系統技術方案如圖2所示。
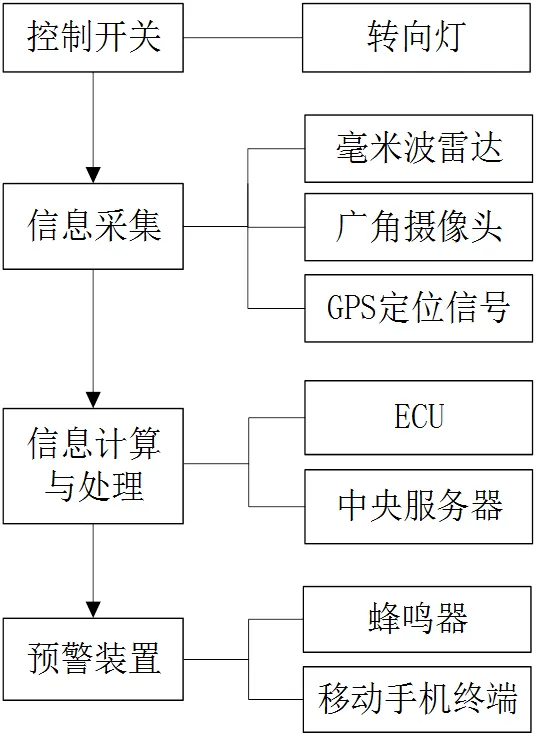
圖2 預警系統技術方案圖
具體實施方式如圖3所示,當掛車轉彎時,駕駛員打開轉向燈,此時系統開始工作,信息采集模塊中毫米波雷達和廣角攝像頭采集路況信息,其中毫米波雷達用于檢測非機動車輛或行人的速度與掛車間的距離,廣角攝像頭用于探測掛車轉彎時的路況,采集的信號經A/D轉換后輸入ECU模塊,ECU模塊經過邏輯運算,輸出控制信號給LED軟光帶和蜂鳴器,若行人或非機動車輛處于危險區域,即內輪差盲區,則軟光帶動態閃爍警告行人或非機動車輛,同時,位于駕駛室內的蜂鳴器發出警示聲,駕駛員和行人即可采取行動避開危險。此外,通過GPS定位駕駛員和行人的移動手機終端,將定位的物理距離信號輸入中央服務器,中央服務器發出的信號輸入ECU模塊,經ECU模塊邏輯運算后反饋給中央服務器,若處于危險路況,則中央服務器發出信號觸發駕駛員和處于危險距離的行人的移動手機終端,由手機發出語音報警。綜上所述,此預警系統能利用LED軟光帶、蜂鳴器和移動手機終端同時預警,不僅提醒處于危險區域的行人和非機動車輛,同時提醒駕駛員,避免轉彎工況事故的發生。當一個預警裝置失效或故障時,另一個預警裝置可以正常工作,起到雙重預警的作用,提高掛車轉彎安全性。
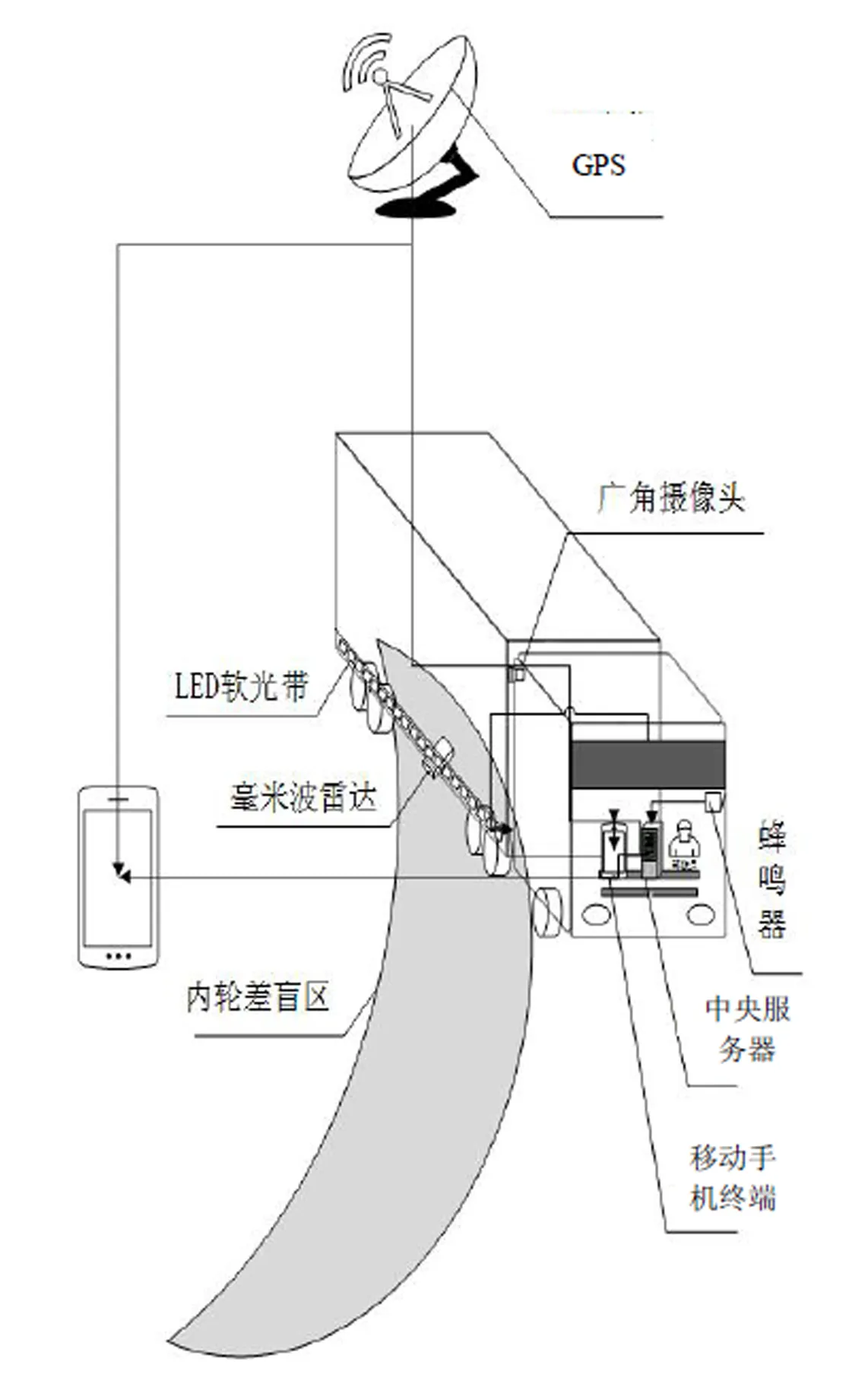
圖3 預警系統結構圖
預警系統的關鍵技術要求掛車轉彎信息采集模塊在任何環境下都可以采集車輛與行人、非機動車輛之間的動態信息,保證雷達和攝像頭在極端車速或惡劣環境下準確采集信息。信息計算與處理模塊要求采用高精度、高計算速度的ECU和中央服務器進行數據計算處理。
預警裝置即執行機構,應能夠準確快速接收ECU指令并發出動作。在駕駛員操縱轉向燈亮起的前提下,如果在內輪差區域(危險區域)雷達和攝像頭檢測到行人或非機動車輛距離掛車的速度越來越高、距離越來越近,則該信息輸送到ECU并經計算處理后,發送指令給預警裝置,軟光帶閃亮、蜂鳴器發出預警聲音、手機終端發出語音提醒。駕駛員可采取操縱轉向盤減小轉彎角度、不再進行轉向操作或制動停車等措施避免交通事故;同時,非機動車人員聽到或看到預警裝置警告可快速遠離危險區域。當非機動車人員遠離內輪差區域后,預警作用自動解除,系統自動關閉。此系統可起到雙向雙重預警作用。如果在危險區域雷達和攝像頭檢測到行人或非機動車輛距離掛車的速度越來越小、距離越來越遠,則信息經ECU計算處理后,預警裝置不做出反應直至危險消除。
3 總 結
該型掛車轉彎預警系統為降低轉彎事故的人員傷亡提供了一種有效方法。預警裝置能夠快速準確對駕駛員和非機動車人員發出預警指令,且預警方法多樣,雙重雙向起作用,提高了掛車轉彎的安全性。
[1]李紅偉,鐘馨,董雨婷,等. 大型車右轉彎安全預警系統[J]. 中國公路,2018(1):106-107.
[2]許多,方守恩,陳雨人. 山區公路彎道預警方法研究[J]. 交通信息與安全,2017,35(6):19-24.
[3]余貴珍,李芹,王云鵬,等. 車輛彎道行駛側傾穩定性分析與側翻預警研究[J]. 北京工業大學學報,2014,40(4):574-579.
[4]洪志福. 大型車輛右側盲區行人碰撞預警方法的研究[D]. 鎮江:江蘇大學,2016.
[5]周明,李平飛,劉娜. 重型貨車右轉彎事故的原因分析與對策研究[J]. 汽車實用技術,2017(9):84-87.
2018-09-25
1002-4581(2019)02-0037-03
U469.5+2
A
10.14175/j.issn.1002-4581.2019.02.010
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中華手工(2017年2期)2017-06-06 23:00:31
公民與法治(2016年4期)2016-05-17 04:09:26
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
中外會展(2014年4期)2014-11-27 07:46:46
民生周刊(2012年10期)2012-10-14 09:06:46
祝您健康(1987年3期)1987-12-30 09:52:32
