單行甘薯秧蔓回收機(jī)設(shè)計(jì)與試驗(yàn)
2019-05-11 06:08:54鄭文秀呂釗欽張萬枝劉正鐸李玉道
農(nóng)業(yè)工程學(xué)報(bào) 2019年6期
鄭文秀,呂釗欽,2,張萬枝,劉正鐸,鹿 瑤,李玉道
?
單行甘薯秧蔓回收機(jī)設(shè)計(jì)與試驗(yàn)
鄭文秀1,呂釗欽1,2※,張萬枝1,劉正鐸1,鹿 瑤1,李玉道1
(1. 山東農(nóng)業(yè)大學(xué)機(jī)械與電子工程學(xué)院,泰安 271018;2. 山東省園藝機(jī)械與裝備重點(diǎn)實(shí)驗(yàn)室,泰安 271018)
針對(duì)目前國(guó)內(nèi)甘薯秧蔓粉碎還田不能回收飼用或人工收割秧蔓勞動(dòng)強(qiáng)度大的難題,該文設(shè)計(jì)了一種單行甘薯秧蔓回收作業(yè)機(jī),可一次完成秧蔓喂入、切割粉碎、輸送及集箱回收作業(yè)。應(yīng)用Box-Behnken試驗(yàn)設(shè)計(jì)方法,以刀輥轉(zhuǎn)速、機(jī)具前進(jìn)速度、刀片離地間隙為試驗(yàn)因素,以秧蔓回收率、留茬長(zhǎng)度、傷薯率為試驗(yàn)指標(biāo),對(duì)甘薯秧蔓回收機(jī)的工作參數(shù)進(jìn)行試驗(yàn)研究,建立了試驗(yàn)指標(biāo)與試驗(yàn)因素之間的回歸模型,分析了各因素對(duì)試驗(yàn)指標(biāo)的影響,并對(duì)試驗(yàn)因素進(jìn)行了綜合優(yōu)化。最優(yōu)工作參數(shù)組合為:刀輥轉(zhuǎn)速2 000 r/min、機(jī)具前進(jìn)速度2.5 km/h、離地間隙15 mm,秧蔓回收率為93.16%、留茬長(zhǎng)度為33.8 mm、傷薯率為0.26%。研究結(jié)果可為甘薯秧蔓機(jī)械化回收飼用提供參考,對(duì)甘薯產(chǎn)業(yè)的輕簡(jiǎn)化生產(chǎn)、節(jié)本增效具有重要意義。
農(nóng)業(yè)機(jī)械;設(shè)計(jì);試驗(yàn);甘薯秧蔓;回收
0 引 言
中國(guó)是世界上最大的甘薯生產(chǎn)國(guó),常年甘薯種植面積為300余萬hm2,約占全球甘薯種植面積的45%[1-2]。甘薯是重要的糧食、飼料、工業(yè)原料、優(yōu)質(zhì)抗癌保健食品及新型的能源用料[3-4]。甘薯秧蔓中含有豐富的營(yíng)養(yǎng)成分,是非常理想的飼料原料[5-6]。甘薯秧蔓產(chǎn)量一般在2×104kg/hm2以上[7]。國(guó)外甘薯秧蔓處理機(jī)械的研發(fā)起步較早[8-12],如日本的自走式甘薯去蔓機(jī)、韓國(guó)小型甘薯去蔓機(jī),由拖拉機(jī)驅(qū)動(dòng),使用旋轉(zhuǎn)輪式擊碎器擊碎秧蔓并運(yùn)出田外或撒在田間,使繁重的秧蔓清理工作變得相對(duì)簡(jiǎn)單。但這種類型的甘薯去蔓機(jī)不能滿足秧蔓收集和回收的要求,擊碎器在擊碎秧蔓時(shí)有可能傷及薯塊,影響作業(yè)質(zhì)量。美國(guó)研究了一種機(jī)械卷蔓機(jī),利用大型拖拉機(jī)將甘薯秧蔓卷在支架上帶出田外,收獲后仍需要進(jìn)行粉碎收集,不適應(yīng)中國(guó)種植生產(chǎn)模式。日本研制了一款具有秧蔓粉碎功能的履帶式甘薯秧蔓處理收獲機(jī),可一次完成秧蔓收集、輸送、粉碎及集箱過程,但機(jī)器設(shè)備結(jié)構(gòu)復(fù)雜、價(jià)格昂貴,并不適合中國(guó)普通農(nóng)戶的應(yīng)用。國(guó)內(nèi)甘薯秧蔓處理機(jī)械的研發(fā)正處于起步階段,主要采用秧蔓直接粉碎還田技術(shù),何玉靜等[13]開發(fā)的4UJH型甘薯切蔓機(jī)具,其與18.4~22.1 kW輪式拖拉機(jī)配套使用,可一次完成秧蔓粉碎、還田等作業(yè)。吳騰等[14]研制出一款步行式甘薯碎蔓還田機(jī);申屠留芳等[15]設(shè)計(jì)了一種單壟紅薯薯藤切碎還田機(jī)。目前,甘薯秧蔓處理機(jī)械存在的主要問題是將秧蔓粉碎后拋撒在大田里,不能實(shí)現(xiàn)秧蔓收集作為飼料使用,造成較大的經(jīng)濟(jì)損失,同時(shí)容易加重病蟲害傳播[16-17]。魏樂樂等[18]進(jìn)行了一種鏈條式薯秧粉碎回收機(jī)仿真設(shè)計(jì),工作原理是由往復(fù)式割刀切斷秧蔓主莖,輸送鏈條夾持秧蔓輸送到機(jī)器后部的粉碎裝置進(jìn)行粉碎收集裝袋,存在薯秧纏繞堵塞問題,收秧效果及其影響因素參數(shù)優(yōu)化等工作還需要進(jìn)一步研究。國(guó)內(nèi)尚未有其他相關(guān)甘薯秧蔓回收機(jī)械的報(bào)道。本文設(shè)計(jì)了一種滾刀式單行甘薯秧蔓回收機(jī),采用滾刀切割粉碎回收原理較好地解決了薯秧纏繞回收難題,對(duì)甘薯產(chǎn)業(yè)的輕簡(jiǎn)化生產(chǎn)技術(shù)、節(jié)本增效具有重要意義。
1 總體結(jié)構(gòu)與工作原理
1.1 甘薯秧蔓生長(zhǎng)特性
甘薯采用壟作種植,壟高20~30 cm左右,其秧蔓生長(zhǎng)茂盛、交錯(cuò)纏繞,可將田間壟溝全部覆蓋[19-21],甘薯秧蔓長(zhǎng)1.5~2.5 m,有些品種甚至達(dá)到4 m,甘薯秧蔓具有較高的韌性[22-23],這些生長(zhǎng)特性均給機(jī)械回收秧蔓工作帶來很大難度。
1.2 總體結(jié)構(gòu)
單行甘薯秧蔓回收機(jī)主要由挑秧鏟、喂入滾筒、刀輥、絞龍、輸送帶、集秧箱、升降油缸、機(jī)架等組成,整機(jī)結(jié)構(gòu)如圖1所示。
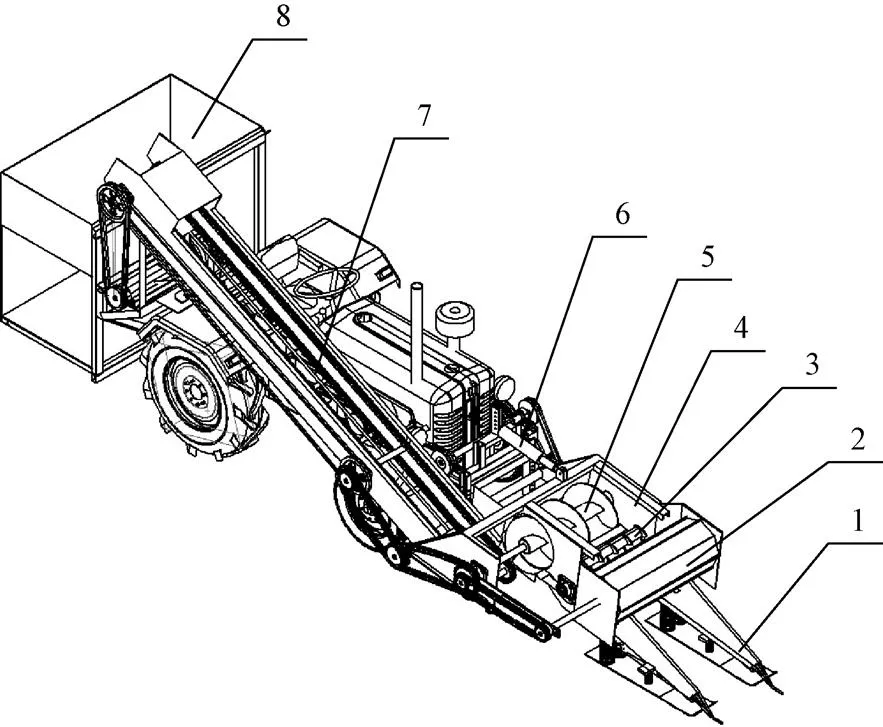
1.挑秧鏟 2.喂入滾筒 3.刀輥 4.機(jī)架 5.絞龍 6.升降油缸 7.輸送帶 8.集秧箱
1.3 工作原理
工作時(shí),隨著機(jī)具的前進(jìn)挑秧鏟將壟底的秧蔓挑起,喂入滾筒轉(zhuǎn)動(dòng)把秧蔓喂入到切割粉碎裝置。秧蔓由高速旋轉(zhuǎn)的刀輥切割粉碎并拋送至絞龍,粉碎后的秧蔓由絞龍和輸送帶輸送到集秧箱收集。
拖拉機(jī)的動(dòng)力由發(fā)動(dòng)機(jī)帶輪輸出,一路經(jīng)皮帶傳動(dòng)機(jī)構(gòu)傳遞給秧蔓輸送機(jī)構(gòu),再通過鏈傳動(dòng)傳遞給喂入滾筒和絞龍;另一路經(jīng)過兩級(jí)帶傳動(dòng)驅(qū)動(dòng)刀輥軸高速旋轉(zhuǎn)。動(dòng)力傳動(dòng)路線如圖2所示。
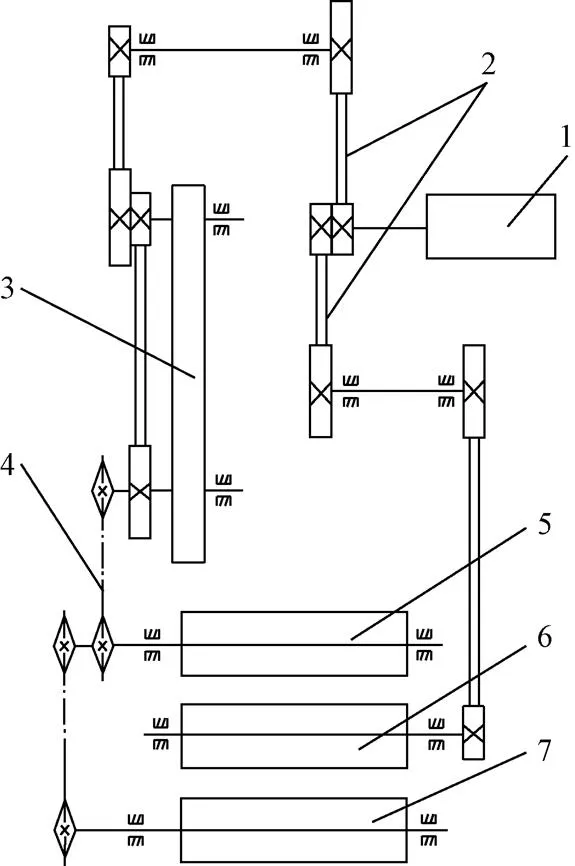
1.發(fā)動(dòng)機(jī) 2.帶傳動(dòng) 3.輸送帶 4.鏈傳動(dòng) 5.絞龍 6.刀輥 7.喂入滾筒
1.4 技術(shù)參數(shù)
單行甘薯秧蔓回收機(jī)的主要技術(shù)參數(shù)如表1所示。
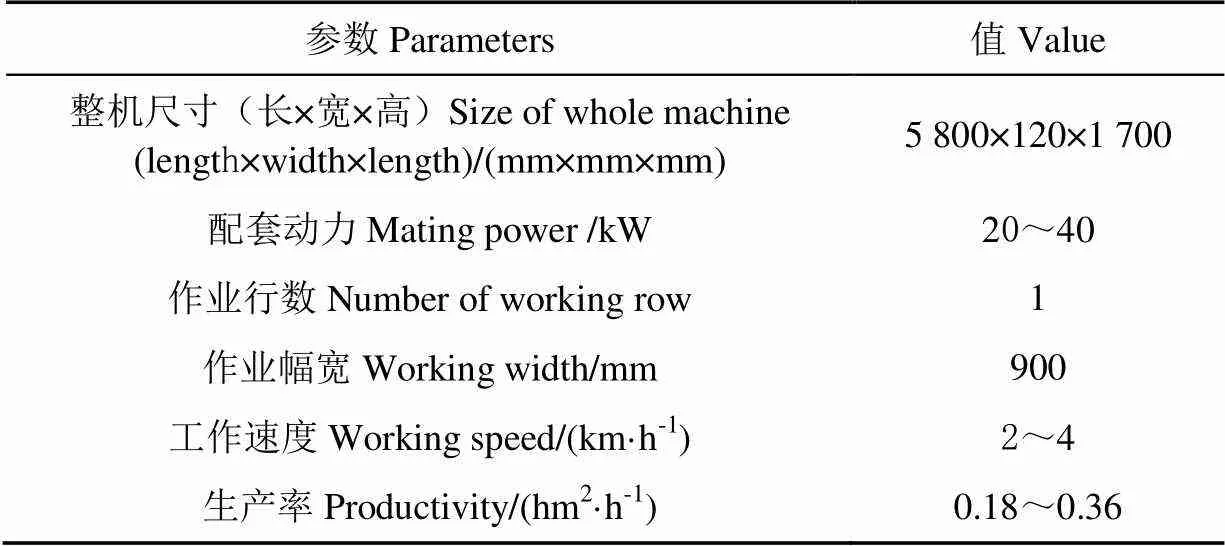
表1 單行甘薯秧蔓回收機(jī)主要技術(shù)參數(shù)
2 單行甘薯秧蔓回收機(jī)關(guān)鍵部件的設(shè)計(jì)
2.1 挑秧裝置的設(shè)計(jì)
挑秧裝置由挑秧齒、挑秧面、限深板、彈簧組成,結(jié)構(gòu)簡(jiǎn)圖如圖3所示。工作時(shí),挑秧裝置前端緊貼地面前移把壟溝里的秧蔓挑起向后上方移動(dòng),并輸送到喂入裝置。

注:為挑秧鏟傾角,(°)。
Note:is the inclination angle of vine picking shovel, (°).
1.挑秧齒 2.挑秧面 3.限深板 4.彈簧
1. Vine picking tooth 2.Vine picking surface 3. Depth limited plate 4. Spring
圖3 挑秧裝置結(jié)構(gòu)簡(jiǎn)圖
Fig.3 Structure diagram of vine picking device
挑秧裝置采用立體楔形結(jié)構(gòu)。挑秧鏟傾角存在一臨界值0,0時(shí),秧蔓不能沿上斜面向后上方滑動(dòng)使秧蔓在挑秧鏟處形成堆積;只有當(dāng)0時(shí)才能順利挑起秧蔓,但角也不能過小,否則會(huì)使挑秧鏟過長(zhǎng)。
通過秧蔓在鏟面上的受力分析可以確定傾角的大小。當(dāng)秧蔓在鏟面上處于滑動(dòng)的臨界狀態(tài)時(shí),受力分析如圖4所示。由圖4可知
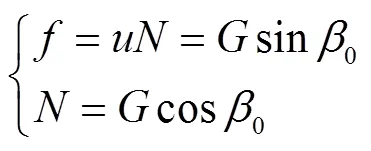
式中為秧蔓受到的支持力,N;為秧蔓重力,N;為秧蔓受到的摩擦力,N;0為傾角臨界值,(°);為秧蔓在鏟面上的摩擦系數(shù),取值為0.55[24]。
由公式(1)得0=28.8°,根據(jù)田間作業(yè)情況,傾角選取25°。甘薯種植壟高約為0.25 m。設(shè)挑秧鏟長(zhǎng)度為,當(dāng)秧蔓從挑秧齒運(yùn)動(dòng)到挑秧鏟頂部時(shí),為了使秧蔓能夠順利挑過壟頂并能被推送到切割裝置中,挑起的秧蔓要高出壟頂0.05~0.1 m(挑秧鏟與喂入滾筒的最大間隙0.1 m),則應(yīng)滿足下列條件
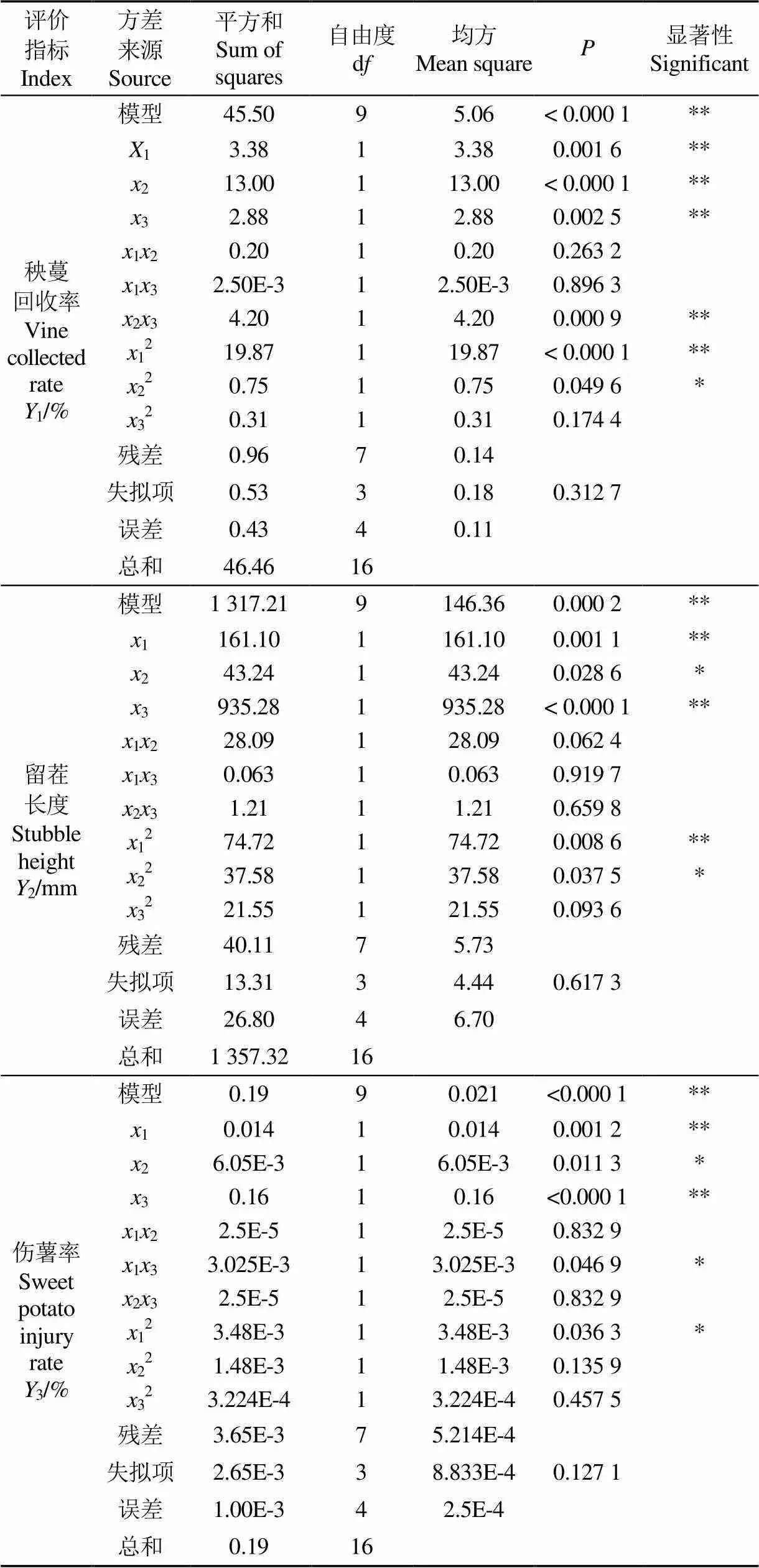
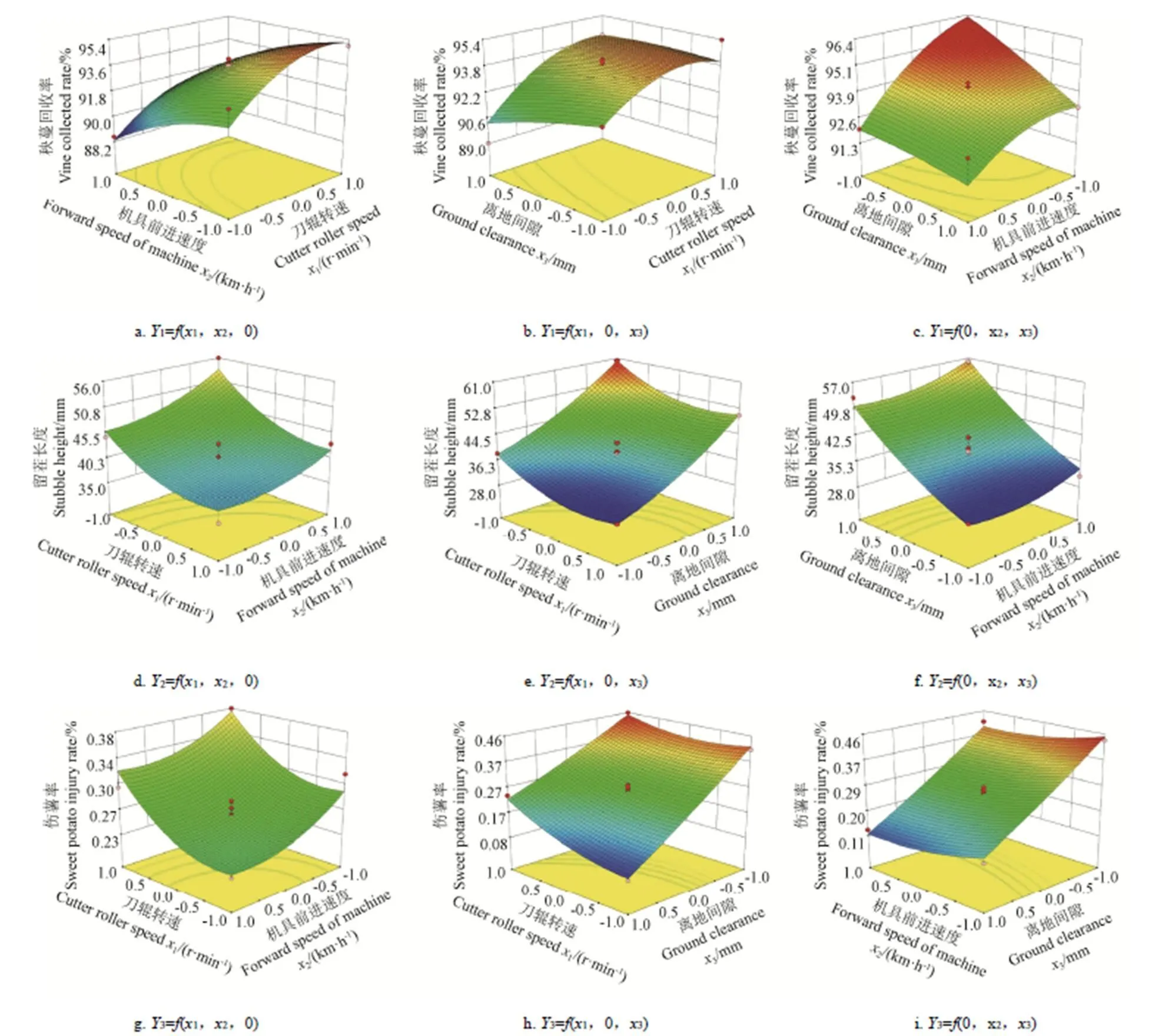
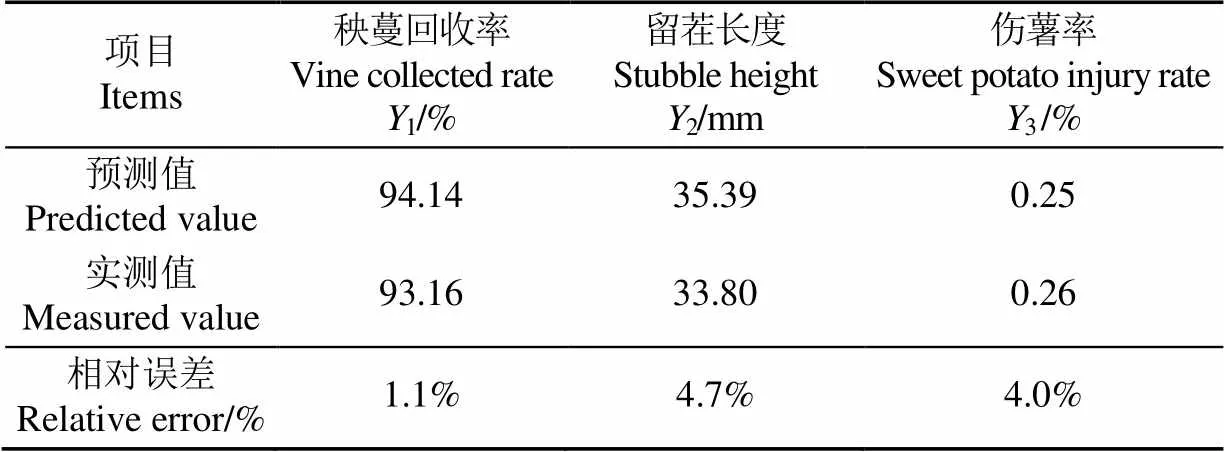
0.25+0.05 由公式(2)得0.65 m<<0.76 m,根據(jù)田間作業(yè)情況確定挑秧鏟長(zhǎng)度為0.7 m。 注:N為秧蔓受到的支持力,N;G為秧蔓重力,N;f為秧蔓受到的摩擦力,N;β0為傾角臨界值,(°)。 喂入裝置主要由喂入滾筒、擺臂等組成,喂入滾筒與機(jī)架采用擺臂浮動(dòng)聯(lián)接,喂入滾筒在做旋轉(zhuǎn)運(yùn)動(dòng)的同時(shí)可繞擺臂上下浮動(dòng),其截面設(shè)計(jì)為8邊形,根據(jù)作業(yè)幅寬設(shè)計(jì)喂入滾筒總長(zhǎng)為900 mm,如圖5所示。當(dāng)喂入量增大時(shí),喂入滾筒與挑秧鏟間隙增大,反之,喂入滾筒與挑秧鏟間隙減小。 1.擺臂 2.撥齒 3.連接板 4.輻條 喂入滾筒繞滾筒軸做圓周運(yùn)動(dòng)時(shí)的線速度稱為圓周速度1,滾筒圓周速度1與機(jī)具前進(jìn)速度v的速比為1: 根據(jù)收獲機(jī)生產(chǎn)廠家的經(jīng)驗(yàn)確定1的范圍為1.2~2.0[25],因?yàn)楦适硌砺L(zhǎng)茂盛且產(chǎn)量高,1過大,切割質(zhì)量不穩(wěn)定,1過小則秧蔓容易在挑秧面上發(fā)生堆積與堵塞,故取1的值為1.5,依據(jù)機(jī)具前進(jìn)速度v求出滾筒轉(zhuǎn)速1。 式中1為滾筒轉(zhuǎn)速,r/min;為滾筒回轉(zhuǎn)半徑,m。 機(jī)具前進(jìn)速度太快會(huì)使作業(yè)質(zhì)量下降,太慢則工作效率降低,根據(jù)實(shí)際作業(yè)需要選取機(jī)具前進(jìn)速度v為0.6~1.1 m/s;喂入滾筒回轉(zhuǎn)半徑依據(jù)設(shè)計(jì)值取0.15 m。由公式(4)求得喂入滾筒的轉(zhuǎn)速范圍為57 r/min≤1≤105 r/min。 秧蔓切割刀輥主要由縱切刀、橫切刀、刀軸等組成,如圖6所示。縱切刀為直刃型刀片,3把縱切刀沿刀軸圓周方向120°均勻排列,縱切刀長(zhǎng)為700 mm。橫切刀分為3組,每組6個(gè),每2個(gè)橫切刀片的距離為140 mm。軸向每組6個(gè)橫切刀片與縱切刀焊接為一體。縱切刀通過螺栓與刀軸連接,縱切刀片的安裝孔在其縱向設(shè)計(jì)成長(zhǎng)孔,通過長(zhǎng)孔可對(duì)縱切刀片的離地間隙進(jìn)行調(diào)節(jié)。切割刀輥繞刀軸作圓周運(yùn)動(dòng)時(shí)的線速度稱為圓周速度2,切割刀輥圓周速度2與機(jī)具前進(jìn)速度v的速比為λ2: 式中為刀輥角速度,rad/s;為刀輥回轉(zhuǎn)半徑,m;2為刀輥圓周速度,m/s。 1.橫切刀 2.縱切刀 3.縱向長(zhǎng)孔 4.刀軸 1.Transverse cutter 2.Longitudinal cutter 3.Longitudinal long hole 4.Cutter shaft 圖6 切割刀輥結(jié)構(gòu)示意圖 Fig.6 Assembly structure diagram of cutter roller 設(shè)縱切刀刀刃運(yùn)動(dòng)軌跡上任一點(diǎn)的坐標(biāo)為(,),取刀軸中心為坐標(biāo)原點(diǎn),機(jī)具前進(jìn)方向?yàn)檩S正方向,垂直向下為軸正方向,如圖7所示。點(diǎn)(,)運(yùn)動(dòng)軌跡方程為: 式中為刀輥運(yùn)動(dòng)時(shí)間,s。 注:為刀輥運(yùn)動(dòng)初始位置中心;′為經(jīng)過時(shí)間后軸心所在位置;點(diǎn)為縱切刀刃軌跡上任一點(diǎn);vt為經(jīng)時(shí)間后刀輥前行距離,m;為縱切刀回轉(zhuǎn)半徑,m;為壟頂留茬長(zhǎng)度,m;v為機(jī)具前進(jìn)速度,m·s-1;為刀輥角速度,rad·s-1。 Note:is axis of cutter roller for initial position;is location of the axis after time;is any point on the blade trajectory oflongitudinal cutter;vt is distance of cutter roller after time, m;is the gyration radius of longitudinal cutter, m;is the vine stubble height on ridge top, m;vis the machine forward speed, m·s-1;is angular speed of cutter roller, rad·s-1. 圖7 刀輥運(yùn)動(dòng)示意圖 Fig.7 Schematic diagram of motion trajectory of cutter roller 對(duì)式(6)中時(shí)間求導(dǎo),求得點(diǎn)(,)的速度為: 式中v為點(diǎn)在方向的分速度,m/s;v為點(diǎn)在方向的分速度,m/s。 為了確保作業(yè)質(zhì)量,切割刀的水平分速度絕對(duì)值不能低于切蔓切割所需速度v,即切割刀應(yīng)有足夠大的向前速度,即 根據(jù)圖7可知 式中為田間最大留茬長(zhǎng)度,m。 綜合上述條件,有 根據(jù)機(jī)具的工作原理,當(dāng)2≤1時(shí),縱切刀刀刃運(yùn)動(dòng)軌跡曲線上的任何一點(diǎn)均不具有向后的水平分速度,不能向后拋送秧蔓。只有當(dāng)2>1、縱切刀轉(zhuǎn)向刀輥的最高部位時(shí),縱切刀絕對(duì)速度的水平分量與機(jī)具前進(jìn)速度方向相反,才能將秧蔓向后拋送至絞龍。機(jī)具前進(jìn)速度v取最低值0.6 m/s,切蔓切割所需速度v為25 m/s[26],取田間實(shí)際最大留茬長(zhǎng)度為0.06 m,縱切刀回轉(zhuǎn)半徑依據(jù)設(shè)計(jì)值取0.2 m。將以上數(shù)據(jù)代入公式(10),可得切割刀輥轉(zhuǎn)速2≥1 590 r/min。 為了驗(yàn)證單行甘薯秧蔓回收機(jī)的工作性能和各參數(shù)設(shè)計(jì)的合理性,2017年10月在山東農(nóng)業(yè)大學(xué)甘薯試驗(yàn)基地進(jìn)行單行甘薯秧蔓回收機(jī)的田間試驗(yàn),土質(zhì)為壤土,土壤含水率為22.5%,甘薯品種為商薯19,單壟單行種植,株距250 mm,壟高250 mm,壟距900 mm,甘薯秧蔓平均長(zhǎng)度1.78 m,平均直徑7.6 mm,含水率78.8%。配套動(dòng)力為泰山260型拖拉機(jī),功率為20 kW。 試驗(yàn)儀器與設(shè)備主要包括單行甘薯秧蔓回收機(jī)、電子天平、水分測(cè)定儀、卷尺、剪刀、工具包等。田間試驗(yàn)如圖8所示。 圖8 單行甘薯秧蔓回收機(jī)田間試驗(yàn) 采用Box-Behnken試驗(yàn)設(shè)計(jì)方案,以秧蔓回收率、留茬長(zhǎng)度和傷薯率作為評(píng)價(jià)指標(biāo),對(duì)刀輥轉(zhuǎn)速(水平值1,編碼值1)、機(jī)具前進(jìn)速度(水平值2,編碼值2)刀片離地間隙(水平值3,編碼值3)開展響應(yīng)面試驗(yàn)研究。刀輥轉(zhuǎn)速太大增加動(dòng)力消耗和振動(dòng),太小影響作業(yè)效果,根據(jù)設(shè)計(jì)計(jì)算刀輥轉(zhuǎn)速取1 800~2 200 r/min;機(jī)具前進(jìn)速度太快會(huì)使作業(yè)質(zhì)量下降,太慢則工作效率降低,故選取機(jī)具前進(jìn)速度為2~4 km/h;離地間隙太小容易打土、傷薯,太大則會(huì)影響作業(yè)效果,因此離地間隙調(diào)節(jié)范圍為10~30 mm。試驗(yàn)因素水平與編碼值如表2所示。 表2 試驗(yàn)因素水平與編碼值 1)秧蔓回收率:將試驗(yàn)田劃分為若小區(qū),每小區(qū)長(zhǎng)為10 m,即每10 m甘薯壟作為1個(gè)測(cè)區(qū)。試驗(yàn)時(shí),隨機(jī)選取某個(gè)測(cè)區(qū)進(jìn)行作業(yè),重復(fù)3個(gè)測(cè)區(qū)取平均值。作業(yè)后,將測(cè)區(qū)內(nèi)回收的秧蔓中夾雜的土壤進(jìn)行人工清理,測(cè)得秧蔓總質(zhì)量為0,然后測(cè)量測(cè)區(qū)內(nèi)地表剩余的秧蔓總質(zhì)量1。秧蔓回收率的計(jì)算公式為: 式中1為秧蔓回收率,%;0為測(cè)區(qū)內(nèi)回收的秧蔓總質(zhì)量,kg;1為測(cè)區(qū)內(nèi)地表剩余秧蔓總質(zhì)量,kg。 2)壟頂留茬長(zhǎng)度:作業(yè)后在測(cè)區(qū)內(nèi)隨機(jī)測(cè)量10株秧蔓留茬長(zhǎng)度,取平均值作為留茬長(zhǎng)度2。計(jì)算公式為: 式中2為壟頂留茬平均長(zhǎng)度,mm;l為各株秧蔓留茬測(cè)量長(zhǎng)度,mm。 3)傷薯率:傷薯是指在單行甘薯秧蔓回收機(jī)工作過程中,機(jī)械部件對(duì)甘薯切傷或碰傷的現(xiàn)象[27]。作業(yè)后挖出測(cè)區(qū)內(nèi)的總薯質(zhì)量為0,傷薯質(zhì)量為1,重復(fù)3個(gè)測(cè)區(qū)取平均值。計(jì)算公式為: 式中3為傷薯率,%;1為測(cè)區(qū)內(nèi)傷薯質(zhì)量,kg;0為測(cè)區(qū)內(nèi)甘薯總質(zhì)量,kg。 依據(jù)Box-Behnken試驗(yàn)原理設(shè)計(jì)試驗(yàn)方案[28-29],試驗(yàn)方案及結(jié)果如表3所示。 表3 試驗(yàn)方案與結(jié)果 注:1、2、3為1、2、3對(duì)應(yīng)的編碼值,下同。 Note:1、2、3is the corresponding coded value of1、2、3, same as below. 利用Design-Expert8.0軟件建立刀輥轉(zhuǎn)速、機(jī)具前速度、離地間隙對(duì)秧蔓回收率、留茬長(zhǎng)度、傷薯率的響應(yīng)面回歸模型,并對(duì)回歸模型進(jìn)行方差分析,結(jié)果如表4所示。 由表4可知,秧蔓回收率、留茬長(zhǎng)度、傷薯率的模型顯著性值均小于0.01,表明回歸模型高度顯著。失擬項(xiàng)值均大于0.05,說明無失擬因素存在,表明回歸方程擬合度高,可用該回歸模型替代真實(shí)試驗(yàn)結(jié)果進(jìn)行分析。各因素對(duì)秧蔓回收率影響的顯著性順序從大到小依次為機(jī)具前進(jìn)速度、刀輥轉(zhuǎn)速、離地間隙;對(duì)留茬長(zhǎng)度影響的顯著性順序從大到小依次為離地間隙、刀輥轉(zhuǎn)速、機(jī)具前進(jìn)速度;對(duì)傷薯率影響的顯著性順序從大到小依次為離地間隙、刀輥轉(zhuǎn)速、機(jī)具前進(jìn)速度。秧蔓回收率、留茬長(zhǎng)度、傷薯率的模型決定系數(shù)2分別為0.979 4、0.970 5、0.980 8,說明分別有2.06%、2.95%、1.92%的變異不能由該模型解釋,說明模型擬合程度好,可用來進(jìn)行試驗(yàn)預(yù)測(cè)。 對(duì)于秧蔓回收率,回歸項(xiàng)12、3、23、12影響極顯著(<0.01),22影響顯著(<0.05);對(duì)于留茬長(zhǎng)度,回歸項(xiàng)1312影響極顯著(<0.01),2、22影響顯著(<0.05);對(duì)于傷薯率,回歸項(xiàng)13影響極顯著(<0.01),2、13、12影響顯著(<0.05)。 利用Design-Expert8.0軟件對(duì)表3的試驗(yàn)結(jié)果進(jìn)行多元回歸擬合分析,得到秧蔓回收率、留茬長(zhǎng)度、傷薯率受到各因素影響的編碼值二次回歸模型,如式(14)~(16)所示。 1=93.02+0.651-1.272-0.603+0.2212-0.02513 +1.0223-2.1712-0.4222-0.2732(14) 2=38.20-4.491+2.322+10.813-2.6512-0.1313 +0.5523+4.2112+2.9922+2.2632(15) 3=0.26+0.0421-0.0282-0.143+0.002 512+0.02713 -0.002 523+0.02912+0.01922+0.008 732(16) 表4 回歸模型的方差分析 注:*表示影響顯著,0.05;**表示影響極顯著,0.01。 Note: * means the influence is significant,0.05; ** means the influence is highly significant,0.01. 剔除模型不顯著項(xiàng),對(duì)模型1、2、3進(jìn)行優(yōu)化,如式(17)~(19)所示。 1=93.02+0.651-1.272-0.603+1.0223-2.1712-0.4222(17) 2=38.20-4.491+2.322+10.813+4.2112+2.9922(18) 3=0.26+0.0421-0.0282-0.143+0.02713+0.02912(19) 在回歸方程(14)-(16)中,分別取任意1個(gè)因素水平為0,研究其余2個(gè)因素對(duì)秧蔓回收率、留茬長(zhǎng)度、傷薯率的影響,應(yīng)用Design-Expert8.0軟件分析得到交互因素影響的響應(yīng)曲面,如圖9所示。 從圖9a可以看出,在同一機(jī)具前進(jìn)速度下秧蔓回收率隨著刀輥轉(zhuǎn)速的增大呈先增大后緩慢增大的曲線變化,同一刀輥轉(zhuǎn)速下秧蔓回收率隨著機(jī)具前進(jìn)速度的增大而減小;從圖9b可以看出,在同一離地間隙下秧蔓回收率隨著刀輥轉(zhuǎn)速的增大呈先增大后緩慢增大的曲線變化,同一刀輥轉(zhuǎn)速下秧蔓回收率隨著離地間隙增大而減小;從圖9c可以看出,在同一機(jī)具前進(jìn)速度下秧蔓回收率隨著離地間隙的增大而減小,在同一離地間隙下秧蔓回收率隨著機(jī)具前進(jìn)速度的增大而減小。從圖9d可以看出,在同一機(jī)具前進(jìn)速度下留茬長(zhǎng)度隨著刀輥轉(zhuǎn)速的增大呈先減小后緩慢降低的曲線變化,同一刀輥轉(zhuǎn)速下留茬長(zhǎng)度隨著機(jī)具前進(jìn)速度的增大而增大;從圖9e可以看出,在同一離地間隙下留茬長(zhǎng)度隨著刀輥轉(zhuǎn)速的增大呈先減小后緩慢降低的曲線變化,同一刀輥轉(zhuǎn)速下留茬長(zhǎng)度隨著離地間隙增大而增大;從圖9f可以看出,降低機(jī)具前進(jìn)速度和離地間隙有助于降低留茬長(zhǎng)度。從圖9g可以看出,增大刀輥轉(zhuǎn)速和降低機(jī)具前進(jìn)速度傷薯率增大;從圖9h可以看出,增大刀輥轉(zhuǎn)速和減小離地間隙傷薯率增大;從圖9i可以看出,減小機(jī)具前進(jìn)速度和離地間隙傷薯率增大。各因素對(duì)傷薯率總體影響趨勢(shì)為刀輥轉(zhuǎn)速降低、機(jī)具前進(jìn)速度越大、離地間隙越大,則傷薯率越小。 圖9 交互因素對(duì)試驗(yàn)指標(biāo)影響的響應(yīng)曲面 根據(jù)單行甘薯秧蔓回收機(jī)的作業(yè)性能要求和實(shí)際工作條件,要求秧蔓回收率高、留茬長(zhǎng)度小、傷薯率低。由于各因素對(duì)目標(biāo)值的影響不一致,需要進(jìn)行全局多目標(biāo)優(yōu)化[30-31]。以秧蔓回收率、留茬長(zhǎng)度、傷薯率為目標(biāo)函數(shù),對(duì)刀輥轉(zhuǎn)速、機(jī)具前進(jìn)速度、離地間隙3個(gè)試驗(yàn)因素進(jìn)行優(yōu)化設(shè)計(jì),優(yōu)化約束條件為 為了尋求最佳參數(shù)組合,綜合考慮3個(gè)因素對(duì)秧蔓回收率、留茬長(zhǎng)度、傷薯率的影響規(guī)律,應(yīng)用Design-Expert8.0軟件進(jìn)行優(yōu)化求解。得到最優(yōu)工作參數(shù)組合:刀輥轉(zhuǎn)速1 988.00 r/min、機(jī)具前進(jìn)速度2.38 km/h、離地間隙16.60 mm,此時(shí)秧蔓回收率為94.14%、留茬長(zhǎng)度為35.39 mm、傷薯率為0.25%。 為了便于實(shí)際應(yīng)用,對(duì)優(yōu)化參數(shù)進(jìn)行適當(dāng)圓整,設(shè)置刀輥轉(zhuǎn)速為2 000 r/min、機(jī)具前進(jìn)速度為2.5 km/h、離地間隙為15 mm,進(jìn)行3次重復(fù)試驗(yàn)取平均值,秧蔓回收率為93.16%,留茬長(zhǎng)度33.8 mm,傷薯率為0.26%,預(yù)測(cè)值與實(shí)測(cè)試驗(yàn)結(jié)果對(duì)比如表5所示。 表5 試驗(yàn)指標(biāo)的預(yù)測(cè)值與實(shí)測(cè)結(jié)果對(duì)比 試驗(yàn)結(jié)果表明,實(shí)測(cè)值與預(yù)測(cè)值的相對(duì)誤差均小于5%,實(shí)測(cè)值與預(yù)測(cè)值較為吻合,說明回歸模型可靠。田間作業(yè)效果如圖10所示。 圖10 田間作業(yè)效果 1)設(shè)計(jì)了一種單行甘薯秧蔓回收機(jī)。該機(jī)能夠一次完成秧蔓喂入、切割粉碎、輸送及集箱回收作業(yè),通過理論分析與試驗(yàn)確定了挑秧裝置、喂入裝置、切割裝置等關(guān)鍵部件的結(jié)構(gòu)及參數(shù),解決了甘薯秧蔓回收難題。 2)采用Box-Behnken試驗(yàn)設(shè)計(jì)方法建立了以秧蔓回收率、留茬長(zhǎng)度和傷薯率為響應(yīng)指標(biāo)的二次回歸模型,通過對(duì)模型交互作用及響應(yīng)曲面分析,得出了刀輥轉(zhuǎn)速、機(jī)具前進(jìn)速度和離地間隙對(duì)響應(yīng)指標(biāo)的影響變化規(guī)律。 3)應(yīng)用Design-Expert8.0優(yōu)化功能對(duì)所建立模型進(jìn)行優(yōu)化求解,并通過試驗(yàn)驗(yàn)證了優(yōu)化結(jié)果的準(zhǔn)確性。最優(yōu)工作參數(shù)組合為:刀輥轉(zhuǎn)速2 000 r/min、機(jī)具前進(jìn)速度2.5 km/h、離地間隙15 mm,此時(shí)秧蔓回收率為93.16%、留茬長(zhǎng)度為33.8mm、傷薯率為0.26%。 [1] 齊萌萌,王士海. 中國(guó)甘薯進(jìn)出口貿(mào)易格局及展望[J]. 農(nóng)業(yè)展望,2017,13(11):60-65. Qi Mengmeng, Wang Shihai. Trade structure of sweet potato imports and exports in China and its outlook[J]. Agricultural Outlook, 2017,13(11):60-65. (in Chinese with English abstract) [2] 馬劍鳳,程金花,汪皓,等. 國(guó)內(nèi)外甘薯產(chǎn)業(yè)發(fā)展概況[J]. 江蘇農(nóng)業(yè)學(xué)報(bào),2012,40(12):1-5. Ma Jianfeng, Cheng Jinhua, Wang Hao, et al. Development of sweet potato industry at home and abroad[J]. Jiangsu Journal of Agricultural Sciences, 2012, 40(12): 1-5. (in Chinese with English abstract) [3] 蘆會(huì)翔,唐道彬,吳正丹,等. 甘薯產(chǎn)量、品質(zhì)及農(nóng)藝性狀的基因型與環(huán)境效應(yīng)研究[J]. 中國(guó)生態(tài)農(nóng)業(yè)學(xué)報(bào),2015,23(9):1158-1168. Lu Huixiang, Tang Daobin, Wu Zhengdan, et al. Genotypic variation and environmental effects on yield, quality and agronomic traits of sweet potato[J]. Chinese Journal of Eco-Agriculture, 2015, 23(9): 1158-1168. (in Chinese with English abstract) [4] Megersa T, Urge M, Nurfeta A. Effects of feeding sweet potato () vines as a supplement on feed intake, growth performance, digestibility and carcass characteristics of sidama goats fed a basal diet of natural grass hay[J]. Tropical Animal Health and Production, 2013, 45(2): 593-601. [5] Kampanat P, Metha W. Performance of lactating dairy cows fed a diet based on treated rice straw and supplemented with pelleted sweet potato vines[J]. Tropical Animal Health and Production, 2013, 45 (2): 533-538. [6] Carlos E P, Valter C A, Rosana C P, et al. Yield and quality of wilted sweet potato vines and its silages[J]. Horticultura Brasileira, 2015, 33(3): 283-289. [7] 趙祉強(qiáng),李曉龍. 甘薯的保健功能及莖葉的綜合利用途徑[J]. 中國(guó)果菜,2018,38(2):5-7. Zhao Zhiqiang, Li Xiaolong. The health function of sweet potato and comprehensive utilization way of stem and leaf[J]. China Fruit and Vegetable, 2018, 38(2): 5-7. (in Chinese with English abstract) [8] 吳騰,胡良龍,王公仆,等. 我國(guó)甘薯秧蔓粉碎還田裝備發(fā)展概況與趨勢(shì)[J]. 農(nóng)機(jī)化研究,2017,39(11):239-245. Wu Teng, Hu Lianglong, Wang Gongpu, et al. Sweet potato seedling crushing returning field equipment development situation and trends[J]. Journal of Agricultural Mechanization Research, 2017, 39(11): 239-245. (in Chinese with English abstract) [9] 趙大為,高占文. 國(guó)內(nèi)外甘薯莖葉處理收獲機(jī)的發(fā)展研究[J]. 農(nóng)業(yè)科技與裝備,2012,216(6):19-20. Zhao Dawei, Gao Zhanwen. Research on the development in the sweet potato stem leaves treatment and harvesting machines at home and abroad[J]. Agricultural Science Technology and Equipment, 2012, 216(6): 19-20. (in Chinese with English abstract) [10] 王冰,胡良龍,胡志超,等. 我國(guó)甘薯切蔓機(jī)發(fā)展概況與趨勢(shì)分析[J]. 江蘇農(nóng)業(yè)科學(xué),2012,40(4):377-379. Wang Bing, Hu Lianglong, Hu Zhichao, et al. Development situation and trend analysis of sweet potato vine cutter in China[J]. Jiangsu Agricultural Sciences, 2012, 40(4): 377-379. (in Chinese with English abstract) [11] 馬標(biāo). 甘薯高清除性切蔓技術(shù)及其裝置研究與優(yōu)化設(shè)計(jì)[D]. 合肥:安徽農(nóng)業(yè)大學(xué),2014. Ma Biao. The Research and Optimizated Design on the High Performance of Cutting Vine Technology and Mechanism of Sweet Potato[D]. Hefei: Anhui Agricultural University, 2014. (in Chinese with English abstract) [12] Amer N N K, Ahmad D, Akhir M D, et al. Effects of rotary mower blade cutting angles on the pulverization of sweet potato vine[J]. Agriculture and Agricultural Science Procedia, 2014, 30(2): 95-101. [13] 何玉靜,楊星釗,孫衛(wèi)平,等. 甘薯秧莖切碎還田機(jī)的設(shè)計(jì)與試驗(yàn)[J]. 河南農(nóng)業(yè)大學(xué)學(xué)報(bào),2009,43(6):639-641. He Yujing, Yang Xingzhao, Sun Weiping, et al. Design and experiment on the sweet potato vine chopping and returning machine[J]. Journal of Henan Agricultural University, 2009, 43(6): 639-641. (in Chinese with English abstract) [14] 吳騰,胡良龍,王公仆,等. 步行式甘薯碎蔓還田機(jī)的設(shè)計(jì)與試驗(yàn)[J]. 農(nóng)業(yè)工程學(xué)報(bào),2017,33(16):8-17. Wu Teng, Hu Lianglong, Wang Gongpu, et al. Design and experiment of walking sweet potato vines crushing machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(16): 8-17. (in Chinese with English abstract) [15] 申屠留芳,鞏尊國(guó),宗林新,等. 單壟紅薯薯藤切碎機(jī)的設(shè)計(jì)[J]. 農(nóng)機(jī)化研究,2014,36(7):89-92. Shentu Liufang, Gong Zunguo, Zong Linxin, et al. Design of single ridge sweet potato vine shredder[J]. Journal of Agricultural Mechanization Research, 2014, 36(7): 89-92. (in Chinese with English abstract) [16] 馮國(guó)明. 秸稈還田的利弊分析[J]. 河北農(nóng)機(jī),2009(5):24. [17] 王文明. 秸稈還田的利弊淺析[J]. 南方農(nóng)業(yè),2017,11(34):103-105. [18] 魏樂樂. 鏈條式薯秧粉碎回收機(jī)設(shè)計(jì)與仿真[D].泰安:山東農(nóng)業(yè)大學(xué),2017. Wei Lele. Chain Type Potato Seeding Recycling Machine Design and Simulation[D]. Taian: Shandong Agricultural University, 2017. (in Chinese with English abstract) [19] 鄭文秀,呂釗欽,鹿瑤,等. 甘薯成熟期秧蔓的機(jī)械物理特性參數(shù)研究[J]. 農(nóng)機(jī)化研究,2018,40(6):173-177. Zheng Wenxiu, Lü Zhaoqin, Lu Yao, et al. Study of mechanical property parameters of sweet potato vine in the mature period[J]. Journal of Agricultural Mechanization Research, 2018, 40(6): 173-177. (in Chinese with English abstract) [20] Akhir H, Ahmad D, Rukunudin I H. Field performance of a two-row sweet potato harvester prototype in bris soil[J]. International Journal of Engineering and Technology, 2011, 8(1): 6-11. [21] Zheng Wenxiu, Lü Zhaoqin, Lu Yao, et al. Shear properties test of sweet potato vine in mature period[J]. International Agricultural Engineering Journal, 2017, 26(4): 204-212. [22] 王冰,胡良龍,田立佳,等. 1JHSM-800型甘薯仿形切蔓機(jī)的研制[J]. 中國(guó)農(nóng)機(jī)化,2012,242(4):103-107. Wang Bing, Hu Lianglong, Tian Lijia, et al. Design of 1JHSM-800 sweet potato vine profiling crushing machine[J]. Chinese Agricultural Mechanization, 2012, 242(4): 103-107. (in Chinese with English abstract) [23] 高嬌,張莉,李小龍,等. 甘薯機(jī)械化割蔓對(duì)比試驗(yàn)[J]. 農(nóng)業(yè)工程,2015,5(2):9-11. Gao, Jiao, Zhang Li, Li Xiaolong, et al. Contrast test of sweet potato mechanized cutting seedling vine[J]. Agricultural Engineering, 2015, 5(2): 9-11. (in Chinese with English abstract) [24] 日本農(nóng)業(yè)機(jī)械學(xué)會(huì). 農(nóng)業(yè)機(jī)械手冊(cè)[M]. 北京:機(jī)械工業(yè)出版社,1991. [25] 卡那沃依斯基. 收獲機(jī)械[M]. 北京:中國(guó)農(nóng)業(yè)機(jī)械工業(yè)出版社,1983. [26] 鎮(zhèn)江農(nóng)業(yè)機(jī)械學(xué)院. 農(nóng)業(yè)機(jī)械學(xué)[M]. 北京:中國(guó)農(nóng)業(yè)機(jī)械工業(yè)出版社,1980. [27] 劉紅波. 影響馬鈴薯收獲機(jī)傷薯率因素的分析[J]. 當(dāng)代農(nóng)機(jī),2015(5):78-79. Liu Hongbo. Analysis of factors affecting potato injury rate of potato harvester[J]. Contemporary farm machinery, 2016(5): 78-79. (in Chinese with English abstract) [28] 葛宜元. 試驗(yàn)設(shè)計(jì)方法與Design-Expert軟件應(yīng)用[M]. 哈爾濱:哈爾濱工業(yè)大學(xué)出版社,2015. [29] 潘麗軍,陳錦權(quán). 試驗(yàn)設(shè)計(jì)與數(shù)據(jù)處理[M]. 南京:東南大學(xué)出版社,2008. [30] 呂金慶,尚琴琴,楊穎,等. 馬鈴薯殺秧機(jī)設(shè)計(jì)優(yōu)化與試驗(yàn)[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào),2016,47(5):106-114. Lü Jinqing, Shang Qinqin, Yang Ying, et al. Design optimization and experiment on potato haulm cutter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(5): 106-114. (in Chinese with English abstract) [31] 張佳喜,楊程,郭俊先,等. 滾刀式青貯玉米起茬及殘膜回收聯(lián)合作業(yè)機(jī)的設(shè)計(jì)與試驗(yàn)[J]. 農(nóng)業(yè)工程學(xué)報(bào),2018,34(6):25-34. Zhang Jiaxi, Yang Cheng, Guo Junxian, et al. Design and experiment of hob-type joint operation machine for silage corn root stubble plucking and residual plastic film collecting[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(6): 25-34. (in Chinese with English abstract) Design and test of single row sweet potato vine recycling machine ZhengWenxiu1, Lü Zhaoqin1,2※, Zhang Wanzhi1, Liu Zhengduo1, Lu Yao1, Li Yudao1 (1.,,271018,; 2.,271018,) Sweet potato is an important raw material for food, feed, industrial, it also is a high quality anti-cancer health food and new energy material. It is widely cultivated in the world, and China is the largest producer of sweet potato in the world, the average perennial planting area of sweet potato is more than 3 million hm2, accounting for about 45% of the global planting area of sweet potato. The yield of sweet potato vine is generally more than 2×104kg/hm2, and the sweet potato vines is rich in nutrients and is an ideal feed material.The sweet potato vines grow vigorously along the ground surface, and the vines are intertwined between the ridges, it is difficult to collect the vines mechanically. Sweet potato harvest mainly includes cleaning the vines and breaking the ridge to harvest, the treatment of vines before harvest has great influence on its harvest efficiency, labor intensity and yield. At present, the collecting mechanization of sweet potato vine in China is almost blank, which seriously restricts the development of sweet potato industry. Cleaning up the vines by hand is a labor intensive and low work efficiency work , which seriously restricts the enthusiasm of farmers in production. At present, the main problem of sweet potato vine treatment machinery at home and abroad is that the vines are crushed and scattered in the field, so the sweet potato vines cannot be collected and used as feed or energy, thus causing greater economic losses and easily aggravating the spread of diseases and insect pests. Aiming at the difficulty that the sweet potato vines can only be harvested by hand, a kind of single row sweet potato vine recycling machine matched with a small four-wheeled tractor was designed. Through theoretical analysis and experiment, the structure and working principle of the recycling machine were analyzed, and key components such as cutting device, vine picking device and feeding device were design. Using Box-Behnken experimental design method, quadratic regression models with the vine collected rate, the vine stubble height, the sweet potato injury rate as the response indexes were established. Through the analysis of model interaction and response surface, the change laws of the influence of cutter roller speed, the forward speed of machine and the ground clearance on the response indexes were obtained. The regression model was optimized by Design-Expert8.0 software, and the accuracy of the predicted results was verified by experiments. The relative error between the measured value and the predicted value was less than 5%, indicating that the model was high reliability. The order of significance of each factor on the vine collected rate was the forward speed of machine, cutter roller speed and ground clearance, the order of significance of each factor on the vine stubble height was the ground clearance, cutter roller speed and forward speed of machine, the order of significance of each factor on the sweet potato injury rate was the ground clearance, cutter roller speed and forward speed of machine. The optimal working parameters were that the cutter roller speed was 2 000 r/min, the forward speed of machine was 2.5 km/h and the ground clearance was 15 mm. Under the condition of optimum working parametersthe vine collected rate was 93.16%, the vine stubble height was 33.8 mm, and the sweet potato injury rate was 0.26%, the working effect was better. The research results are of great significance in promoting the development of light and simplified production of sweet potato industry. agricultural machinery; design; experiments; sweet potato vine; recycling 2018-09-18 2019-03-26 國(guó)家重點(diǎn)研發(fā)計(jì)劃項(xiàng)目(2017YFD0700705);山東省農(nóng)機(jī)裝備研發(fā)創(chuàng)新計(jì)劃項(xiàng)目(2017YF002);山東省現(xiàn)代農(nóng)業(yè)產(chǎn)業(yè)技術(shù)體系薯類創(chuàng)新團(tuán)隊(duì)農(nóng)業(yè)機(jī)械崗位專家資助項(xiàng)目(SDAIT-16-10) 鄭文秀,博士生,主要從事農(nóng)業(yè)機(jī)械與裝備研究。 Email:wenxiu9013@163.com 呂釗欽,教授,博士生導(dǎo)師,主要從事農(nóng)業(yè)機(jī)械化技術(shù)與農(nóng)機(jī)裝備研究。Email:lzqsdau2003@126.com 10.11975/j.issn.1002-6819.2019.06.001 S233.4 A 1002-6819(2019)-06-0001-09 鄭文秀,呂釗欽,張萬枝,劉正鐸,鹿 瑤,李玉道. 單行甘薯秧蔓回收機(jī)設(shè)計(jì)與試驗(yàn)[J]. 農(nóng)業(yè)工程學(xué)報(bào),2019,35(6):1-9. doi:10.11975/j.issn.1002-6819.2019.06.001 http://www.tcsae.org Zheng Wenxiu, Lü Zhaoqin, Zhang Wanzhi, Liu Zhengduo, Lu Yao, Li Yudao. Design and test of single row sweet potato vine recycling machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(6): 1-9. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.06.001 http://www.tcsae.org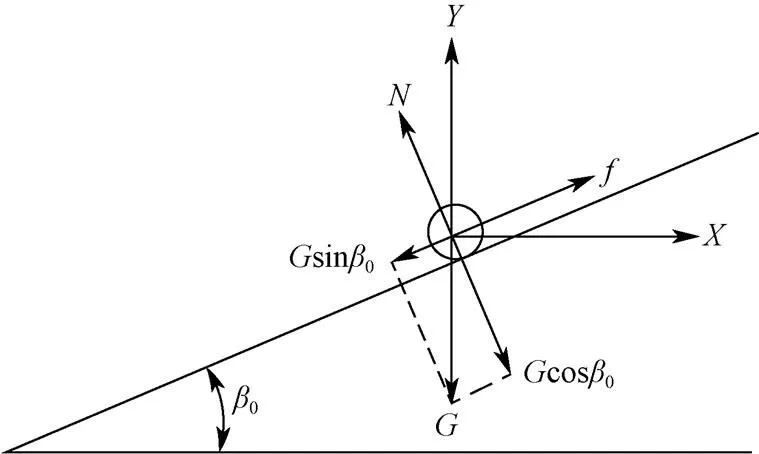
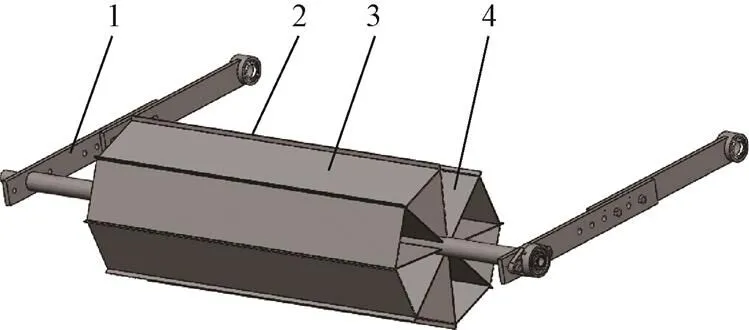
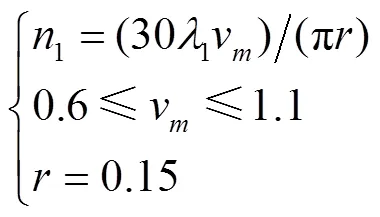
2.2 浮動(dòng)式喂入裝置的設(shè)計(jì)
2.3 秧蔓切割刀輥設(shè)計(jì)

3 田間試驗(yàn)
3.1 試驗(yàn)條件

3.2 試驗(yàn)指標(biāo)與測(cè)試方法

4 試驗(yàn)結(jié)果與分析
4.1 試驗(yàn)結(jié)果

4.2 回歸模型的建立與方差分析
4.3 雙因素交互效應(yīng)分析
5 模型優(yōu)化與試驗(yàn)驗(yàn)證
5.1 參數(shù)優(yōu)化

5.2 驗(yàn)證試驗(yàn)

6 結(jié) 論
 農(nóng)業(yè)工程學(xué)報(bào)2019年6期
農(nóng)業(yè)工程學(xué)報(bào)2019年6期
- 農(nóng)業(yè)工程學(xué)報(bào)的其它文章
- 嚴(yán)寒地區(qū)小型線性菲涅爾聚光集熱器末端損失與補(bǔ)償
- 基于近鄰傳播算法的茶園土壤墑情傳感器布局優(yōu)化
- 四足機(jī)器人腿部并聯(lián)機(jī)構(gòu)末端位置誤差分析與驗(yàn)證
- 巴氏殺菌和超巴氏殺菌對(duì)牛乳清蛋白結(jié)構(gòu)及熱穩(wěn)定性的影響
- 考慮趨膚效應(yīng)和動(dòng)態(tài)磁滯效應(yīng)的電機(jī)旋轉(zhuǎn)鐵芯損耗模型
- 基于路面激勵(lì)自適應(yīng)的液電饋能懸架動(dòng)力學(xué)性能協(xié)調(diào)控制