船載衛星遙感數據接收天線跟蹤精確度改進方法
2019-05-10 08:59:02陳元偉張國梁戎景會
航天器工程 2019年2期
陳元偉 張國梁 戎景會
(航天恒星科技有限公司,北京 100095)
目前,國外的船載遙感衛星數據接收系統使用較多的主要是美國和法國,多用于接收中低碼速率的極軌氣象衛星數據,頻段多設定在X、L、S頻段,用于衛星數據的接收和解調。由于遙感衛星分辨率和數據傳輸速率不斷提高,這種船載小型接收站已經不能滿足數據接收需求,國外大型艦船已經開始著手建設可以接收多種遙感衛星的大型接收系統。
由于海上環境惡劣,船的航行、搖擺、旋回、振動和顛簸等都會使船的位置和姿態不斷地變化[1],造成天線跟蹤精度下降,甚至造成跟蹤目標丟失。此前,我國建設的移動衛星遙感數據接收系統主要是車載站,天線口徑一般不超過6 m,并且在跟蹤接收衛星影像數據時,左右搖擺適應范圍較小。我國的遠洋測量船安裝了衛星測控天線,主要接收衛星下傳的S頻段遙測數據。由于X頻段比S頻段的波束窄,對天線指向精度要求更高。我國雪龍號科學考察船每年往返南北極進行科學考察,航行過程中需要及時了解氣候和海況變化。尤其航行經過的西風帶海域臺風頻發,需要依據接收到的衛星遙感數據,選擇合適的航線來規避潛在的風險。在極地地區的海冰分布不斷變化,雪龍號需及時根據海冰分布情況不斷調整優化航線。此前,在海上和極地地區航行,主要利用通信衛星接收地面系統轉發的衛星遙感數據進行分析,不但成本高,而且實效性不強,難以滿足應用需要。在雪龍號上建造大型遙感衛星數據接收系統(7.3 m天線),可以實時接收過境衛星下傳的X頻段高分辨率遙感影像數據,實現數據的快速落地和應用,為極地考察提供服務。其次,雪龍號航行要經過西風帶,船行過程接收衛星影像數據不但需要克服船行影響,還需要克服左右20°的搖擺。因此船載接收系統建設需要在天線質量大、響應慢、環境惡劣、X頻段跟蹤指向精度要求苛刻條件下,解決對衛星穩定捕獲跟蹤的難題。
本文介紹的設計方法主要是利用天線座架靈活性設計和隔離船搖的天線伺服控制設計方法解決上述難題,該方法在雪龍號建設中得到了應用和驗證,提升了我國在大型船載遙感衛星數據接收系統建設的能力。
1 使用環境要求
衛星遙感數據船載接收系統需要X頻段低軌遙感衛星(軌道高度300~1500 km)具有全半球自動跟蹤能力,保證過頂跟蹤不丟失目標。在海洋特殊環境下,船載接收系統須滿足如下使用要求。
(1)搖擺適應性。正常航行時,船搖±5°;西風帶區域航行時,船搖(-22~-20)°或(+20~+22)°;船搖周期17~18 s。
(2)抗風。穩態7級(17 m/s)、瞬態8級(22 m/s),設備應能正常工作;惡劣海況下,即風速12級(≥32 m/s),設備應固定不受損壞。
2 船載衛星遙感數據接收天線跟蹤精確度改進方法
在海洋環境下進行衛星數據接收任務時,船搖對天線指向精度及跟蹤精度影響很大[2]。由于海浪的影響,船載天線在跟蹤和對準目標時,船體的搖擺使得天線座的姿態發生變化,導致天線無法實時對準目標,影響天線的跟蹤及指向精度[3]。船行過程中,船搖隔離能力是影響船載數據跟蹤接收系統對X頻段低軌衛星全空域、無盲區跟蹤和船搖過程中可視區域內的高精度指向跟蹤的主要因素。船搖隔離設計就是克服船姿擾動對天線跟蹤的影響,使天線可以準確指向目標位置,從而達到高精度、高速度跟蹤目標的目的[4]。
本文的設計方法是選擇高機動性能力天線,利用控制回路對天線進行控制,提升船載天線跟蹤系統的船搖隔離能力,從而提高船載跟蹤接收天線對X頻段遙感衛星跟蹤的精確度。
2.1 天線靈活性設計
在船搖情況下跟蹤快速運動目標要求船載天線具有高靈活性,天線座架結構是影響天線跟蹤衛星靈活性的主要因素,必須能夠有效地隔離船搖。要實現船載全空域無盲區跟蹤,還要滿足船平臺對尺寸、質量、環境適應性的要求。對目前常用的6種天線座架形式,以7.3 m口徑天線為例進行比較(見表1)。

表1 不同類型天線座架對比Table 1 Comparison of different types of antenna mount
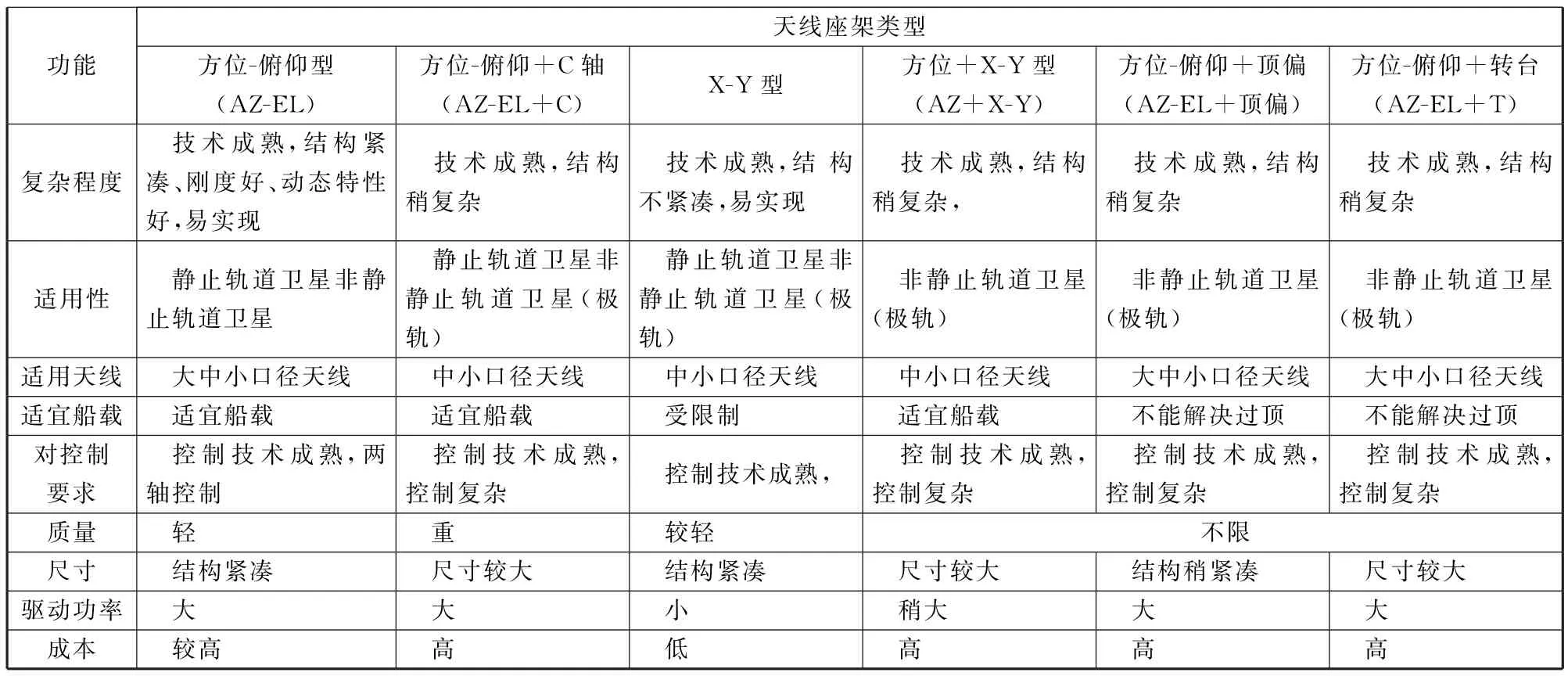
續 表
根據表1的比較結果可知,AZ-EL型天線座架不具備過頂跟蹤能力,特別是在船搖情況下,由于復雜的海況使天頂跟蹤具有不確定性。只能選取AZ-EL+C型座架。從結構上考慮,AZ-EL+C型在結構上要復雜一些,要比X-Y形式多一套轉動系統、驅動系統及軸角輸出。從性能上考慮,X-Y型座架跟蹤盲區在X軸軸向兩頭方向上,不適應船載情況,結構也不如A-E座架緊湊。
綜合分析,AZ-EL+C型座架能夠適應船載站對低軌目標的連續過頂跟蹤要求,同時也能適應同步衛星的跟蹤要求。針對AZ-EL+C型座架,在最極端情況(衛星正過頂)下,伺服指標估算統一按目標軌道高度300 km,船搖橫搖按±22°,船搖橫搖周期為17s伺服,采樣率為40 Hz計算。將船搖按照正弦曲線進行模擬,位置-速度-加速度變化曲線見圖1。

圖1 船搖條件下的速度、加速度仿真曲線Fig.1 Velocity acceleration simulation curve under vessel shook
根據圖1可知:橫搖最大速度為8.117(°)/s,加速度為3(°)/s2。取目標軌道高度h=300 km,目標的線速度為

式中:μ為地球引力常數,μ=3.986005×1014m3/s2;Re為地球半徑,Re=6 378.140 km。
正過頂的情況下,直接將線速度轉換為俯仰或交叉C軸的角速度為

加速度很小,可按1(°)/s2確定。
根據上述計算結果,選取的AZ-EL+C型天線座架的動態性能見表2,完全能夠滿足低軌衛星的跟蹤需求。

表2 選擇天線產品伺服的機動性能指標Table 2 Maneuverability indicator of the antenna servo
2.2 船搖隔離設計方法
目前,常采用陀螺穩定和前饋穩定兩種策略隔離船搖對天線伺服系統的影響[5]。通過敏感由船搖所產生的俯仰角速度及橫傾角速度,利用穩定回路設計使天線產生一個與船搖相反方向的運動,保持天線在空間的指向不變[6-7]。
本文采用的是使用陀螺穩定隔離船搖、船搖前饋補償和自跟蹤控制等多種技術手段控制天線穩定指向的方法。通過將兩個正交速率陀螺安裝在天線俯仰叉臂上,分別平行于俯仰軸和橫傾軸,敏感由船搖所產生的俯仰角速度及橫傾角速度,將這些信息負反饋到回路中,實現速率陀螺穩定控制,以克服船體搖擺對跟蹤的影響。利用船上的光纖陀螺羅經測量出船體的3個轉動自由度的轉角等船姿信息,經坐標變換計算出在船搖下的天線甲板坐標系的控制角度。這些信息經計算機處理后提前計算出甲板方位、俯仰軸的船搖角速度,實現對船搖的前饋控制。其中陀螺穩定環和自跟蹤環的信號處理基于偏差控制,并采用頻率域的方法進行設計校正。陀螺穩定環、自跟蹤環設計為典型的2階系統,在計算機內完成校正運算后對大小信號的模型變化,及調節器的積分項進行補償。為了減小動態滯后誤差、提高船搖隔離度指標,設計的陀螺穩定環、自跟蹤環具有較高的開環放大倍數和較快的動態響應能力。環路帶寬做得寬,開環增益做得高,就能獲得較高的船搖隔離度。采用這種隔離船搖的方法,船搖隔離度是陀螺環隔離度和跟蹤位置環隔離度兩項之和,因而比單純的位置環隔離度要高。此方法適合于要求跟蹤速度快、船搖隔離度高的場合。
船遙隔離度用來衡量回路對于船搖擾動抑制的程度,即沒有船搖穩定措施時天線的搖擺角度與有船搖穩定措施時天線剩余搖擺角度之比值,度量隔離度用分貝(d B)表示[8]。本方法環路隔離船搖穩定結構如圖2所示[9]。
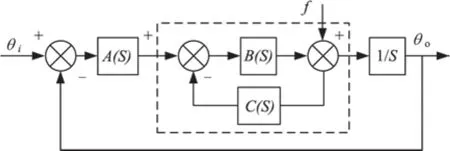
圖2 環路隔離船搖穩定結構方框圖Fig.2 Structural diagram of vessel stability
對船搖速度擾動量f產生的誤差傳遞函數可以表示為

式中:D(S)為速率陀螺開環傳遞函數,D(S)=B(S)-C(S);E(S)為自跟蹤位置環開環傳遞函數
根據船搖隔離度定義,可以推導出系統總隔離度為

式中:L1為陀螺環船搖隔離度,L1=-20lg[1+D(S)];L2為位置跟蹤環船搖隔離度,L2=-20lg[1+E(S)]。
當船搖為低頻擾動時,船搖隔離度主要與船搖頻率點處的陀螺開環增益、位置跟蹤環開環增益有關,船搖周期為17 s,頻率為0.52 rad/s,根據前面環路設計參數,計算可得:L1>20 dB,L2>20 dB。
根據工程經驗,采用船搖速度前饋技術,船搖隔離度(L3船搖速度前饋隔離度)可增加8 dB以上,本方案系統船搖隔離度可以達到:

3 工程應用
3.1 天線控制設計
船載天線伺服系統以AZ-EL+C軸座架為控制對象,每軸均可選擇設置位置環、陀螺環、速度環、電流環,完成對角位置的閉環控制。通過船上的光纖陀螺羅經測量出船體的3個轉動自由度的轉角等船姿信息,經坐標變換計算出在船搖下的天線甲板坐標系的控制角度,以實現對同步衛星以及低軌遙感衛星目標全空域的可靠捕獲及穩定跟蹤。同時光纖陀螺羅經提供的船姿信息,伺服系統編碼器能實時提供目標在甲板坐標系中的位置,這些信息經計算機處理后可提前計算出甲板方位、俯仰軸的船搖角速度,實現對船搖的前饋控制,提高船搖隔離度。
3.2 天線捕獲跟蹤控制流程設計
天線控制的根本目的就是實現對目標的快速捕獲及精確跟蹤,并使之達到系統要求的跟蹤性能和跟蹤精度。采取合適的控制模式抑制擾動使天線快速、穩定跟蹤目標是系統抗擾動設計的核心[7]。本方法采用復合控制技術等,實現大范圍調轉天線、快速展開與捕獲目標和高精確跟蹤等功能的控制策略。天線自動跟蹤功能采用“俯仰與交叉C軸跟蹤+方位隨動”的跟蹤模式,能夠適應各種復雜情況下的衛星跟蹤,如隔離船搖、衛星過頂跟蹤、低仰角跟蹤等。具體控制流程如下(見圖3):
(1)系統管理計算機根據衛星軌道根數和實時接收船用慣導設備送來的船姿船位信息,實時計算天線對過境衛星的軌道預報數據(大地系方位、俯仰引導角度),送天線控制單元。
(2)天線控制單元根據過境衛星的實時軌道預報數據、實時船姿船位信息,經坐標變化后,將大地系引導角度數據轉換為甲板測量系角度數據(方位角、俯仰角),控制天線3個軸轉動到甲板座標系的預置等待點。
(3)目標出現后,當滿足捕獲門限條件時,實現對衛星目標的自動捕獲。目標捕獲后,轉入俯仰與交叉C軸自動跟蹤模式,對目標進行連續跟蹤。
(4)在天線對目標的連續跟蹤過程中,天線軸角偏碼設備對天線軸的轉角實時編碼、顯示、處理并送至系統管理計算機,以完成對測量數據的處理。
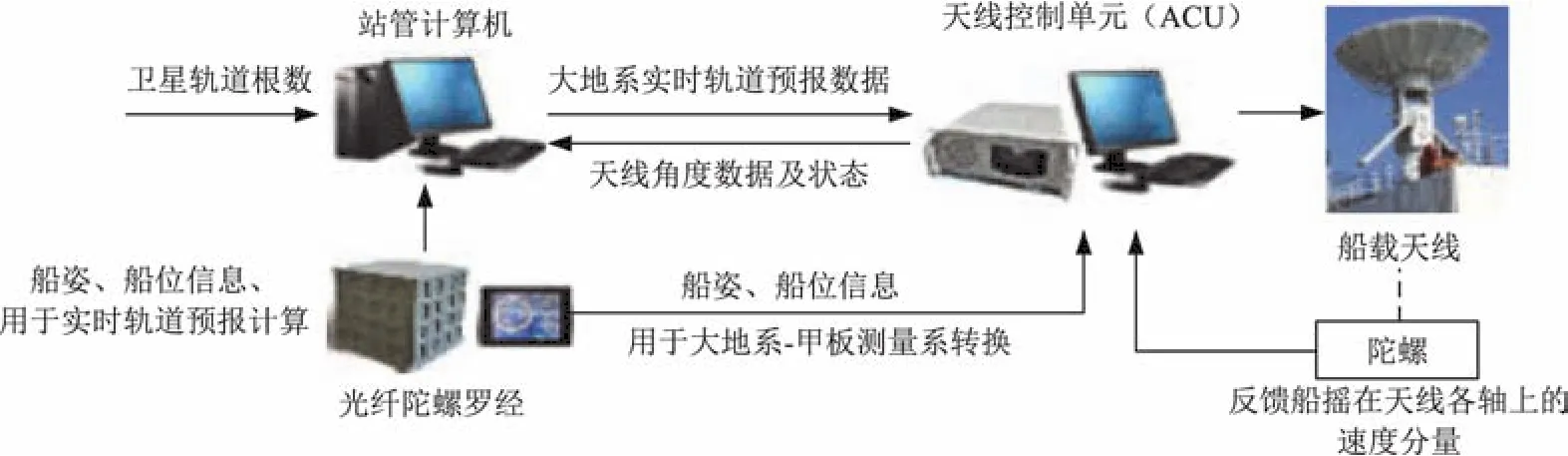
圖3 天線捕獲跟蹤信息流Fig.3 Antenna captures the tracking information flow diagram
3.3 應用情況
本文的設計已在雪龍號船載衛星遙感接收處理系統得到應用,該系統是我國建設的首個大型船載遙感衛星數據接收系統。雪龍號船載衛星遙感接收處理系統伺服船搖擾動隔離度達到48 dB。經測試在船搖(-22~-20)°或(+20~+22)°,船搖周期17~18 s條件下,天線指向誤差≤0.1°,伺服指向誤差≤0.05°(見圖4)。

圖4 雪龍號船載衛星遙感數據接收系統實物圖Fig.4 Picture of the shipboard remote sensing data reception system of XUELONG
2015年該系統開始運行,至今已隨雪龍船參加了第32、33次南極考察,第7、8次北極考察。該系統在瞬息萬變、環境惡劣的極地大洋中提供了最準確的數據,結合航行動態系統,等于為雪龍船量身定做了一套活地圖[10]。在此期間,系統獲取的實時遙感數據,為“雪龍”船在冰區航行提供實時云圖和冰情信息,助力“雪龍號”科考船成功從南極浮冰圍困中突圍,確保了極地科考任務按計劃順利完成。通過雪龍船試航和南極考察對船載接收系統效果進行了驗證,充分證明了船載接收系統設計的穩定性和可靠性。
4 結束語
本文提出的衛星遙感數據接收系統的精準跟蹤設計方法,面向艦船特殊需求,采用了AZ-EL+C軸優化設計的座架,伺服控制采用陀螺穩定隔離船搖、船搖前饋補償隔離船搖和自跟蹤隔離船搖等多種手段,使系統船搖隔離度達45 dB以上,天線指向誤差≤0.1°。經過工程驗證,該設計方法可以實現對X頻段低軌衛星全空域無盲區跟蹤和船搖過程中可視區域內的高精度穩定指向跟蹤。本文的設計方案同樣適用于機載、車載等其他移動設備裝載的衛星遙感數據跟蹤接收系統,具有良好的工程實用價值和較大應用前景。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17