航天器艙外載荷適配器技術綜述
2019-05-10 08:59:06康永周暉馬少君高波譚立
航天器工程 2019年2期
關鍵詞:機械
康永 周暉 馬少君 高波 譚立
(蘭州空間技術物理研究所,蘭州 730000)
航天器艙外載荷適配器(以下簡稱為載荷適配器)是一種質量和體積較小、功能較簡單、復雜度較低的輕小型空間對接機構[1],支持艙外載荷在軌安裝、拆卸,為艙外載荷提供通用化的機械、電能、信息、熱控、流體等部分或全部接口。其用途可歸納為:①用于艙外暴露實驗,如在“國際空間站”(ISS)的大量材料暴露、空間環境監測、空間生命科學、空間天文和空間地球科學等領域的試驗研究中應用[2-5]。②用于在軌航天器或平臺部件替換維修,如在更換ISS日本暴露設施中的電源配電箱、生存電源配電箱、視頻信號轉換開關、流體泵組合件等時應用[6],以及在美國“軌道快車”(OE)項目在軌可更換單元(ORU)的在軌更換中應用[7]。
我國在“十一五”期間開始了空間站艙外載荷適配器的研發工作,目前已進入工程研制和應用階段。例如,在神舟七號任務中開展的固體潤滑材料外太空暴露試驗[8]中應用。隨著我國空間技術的發展,特別是未來空間站建成運行,對載荷適配器的需求將急速增長。
本文介紹了國內外幾種載荷適配器,針對空間機械臂操作、人機工效學存在的問題,分析了載荷適配器的關鍵技術和解決途徑,提出了我國載荷適配器技術發展建議。
1 國內外載荷適配器
根據操作方式不同,載荷適配器可分為被動式和主動式兩類(見圖1)。被動式載荷適配器由機械臂或航天員操作進行艙外載荷的對接,然后由載荷適配器實現鎖緊和接口連通。主動式載荷適配器由機械臂或航天員將載荷搬運至載荷適配器的捕獲范圍內,然后由載荷適配器主動實現對接、鎖緊和接口連通。

圖1 載荷適配器分類示意Fig.1 Classification of payload adapters
1.1 國外載荷適配器
1.1.1 日本EEU
日本實驗艙暴露設施(JEM-EF)與暴露載荷連接的載荷適配器稱為EEU[9],見圖2。EEU上能夠安裝或更換質量不大于500 kg的暴露載荷。它由暴露設施連接單元(EFU)和載荷接口單元(PIU)組成。EFU包括捕獲鎖(3個)、導向錐(6個)、電源流體連接器,以及內部的1套同時驅動3個固定鎖臂的連接機械。PIU包含V形導向槽(3個)、中央阻尼器(1個)、定位銷(6個),以及與EFU對應的電源流體連接器。EFU能夠抓取被機械臂送到預定位置的PIU,并且克服和吸收機械臂負載造成的定位誤差,連接或脫離PIU。EFU和PIU的接口都裝有電源流體連接器,為載荷提供電能、通信、熱控和流體[10-11]。

圖2 EEU接口示意Fig.2 Interfaces of EEU
EEU的功能實現方式如下。
(1)引導定位。在起始階段通過EFU上的3個捕獲鎖捕獲與之對應的PIU上的3個V形導向槽,主動消除安裝于載荷端的PIU與安裝于平臺端的EFU之間的初始位置姿態誤差。然后,基于銷孔配合原理,利用定位銷和孔的配合實現精確定位。
(2)機械鎖緊和電連接。通過平臺端電力驅動的捕獲鎖實現機械鎖緊、電源流體連接器連接。
EEU的工作過程為:①由機械臂將載荷移動到待安裝的EFU位置[12];②由EFU上面的3個捕獲鎖捕獲PIU,由導向錐和定位銷的配合精確定位,最終依靠捕獲鎖和V形導向槽抓獲并對準PIU時產生的強力[13-15],連接所有電源流體連接器。
1.1.2 美國FRAM
美國FRAM[16-20]廣泛應用于美國和歐洲載荷暴露平臺上,屬于純機械式的載荷適配器。FRAM由機械臂或航天員操作對接并提供動力,實現載荷的供電、通信、機械連接。FRAM通過螺栓連接到暴露平臺上,其結構組成與安裝示意如圖3所示,主動端組成如圖4所示。
FRAM功能實現方式如下。
(1)引導定位。通過機械臂或航天員操作,利用圓錐銷和圓錐孔的引導消除安裝于載荷端的接口部分與安裝于平臺端的接口部分之間的初始位置姿態誤差,再進一步利用圓柱銷和孔的配合實現定位。
(2)機械鎖緊和電連接。基于絲杠副傳動原理,將外接工具或機械臂提供的旋轉動力經放大轉化為軸向力,推動鎖緊銷、盲插連接器插頭沿軸向運動與馬蹄扣、盲插連接器插座配合,實現載荷與平臺的機械鎖緊及電連接。
FRAM的工作過程為:①機械臂或航天員調整載荷端FRAM主動端與被動端之間的相對位置姿態,直到所有定位銷孔配合成功;②由外部機械設備驅動FRAM主動端齒輪箱帶動螺桿轉動,螺桿推動驅動架a、驅動架b向兩側運動,直到4個插銷完全插入到位,完成盲插連接器的連接并鎖緊FRAM被動端的馬蹄扣。
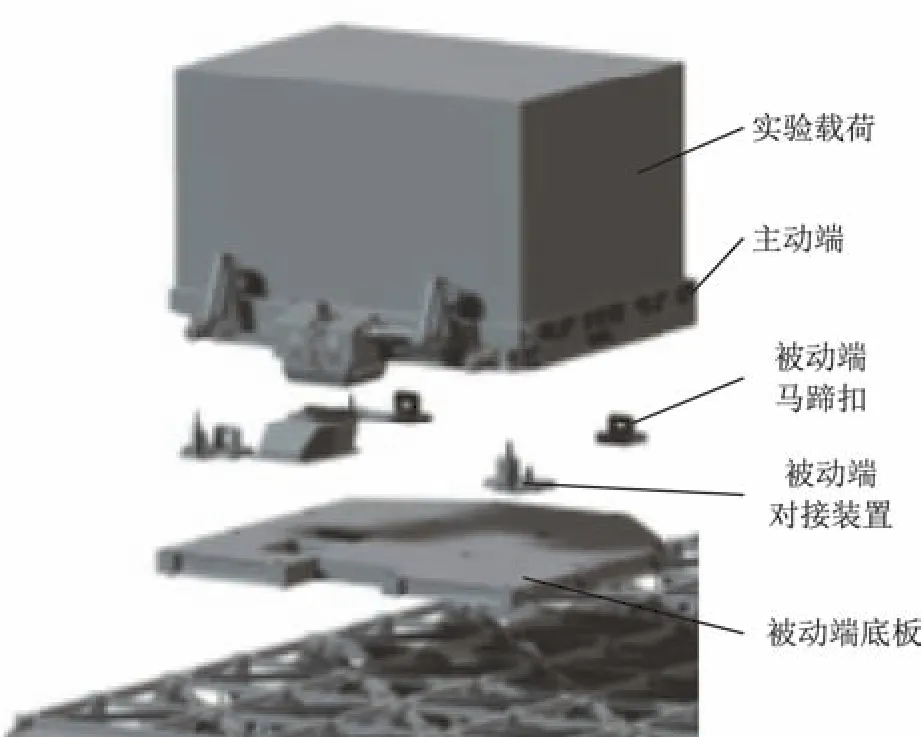
圖3 FRAM結構組成與安裝示意Fig.3 Composition and installation of FRAM
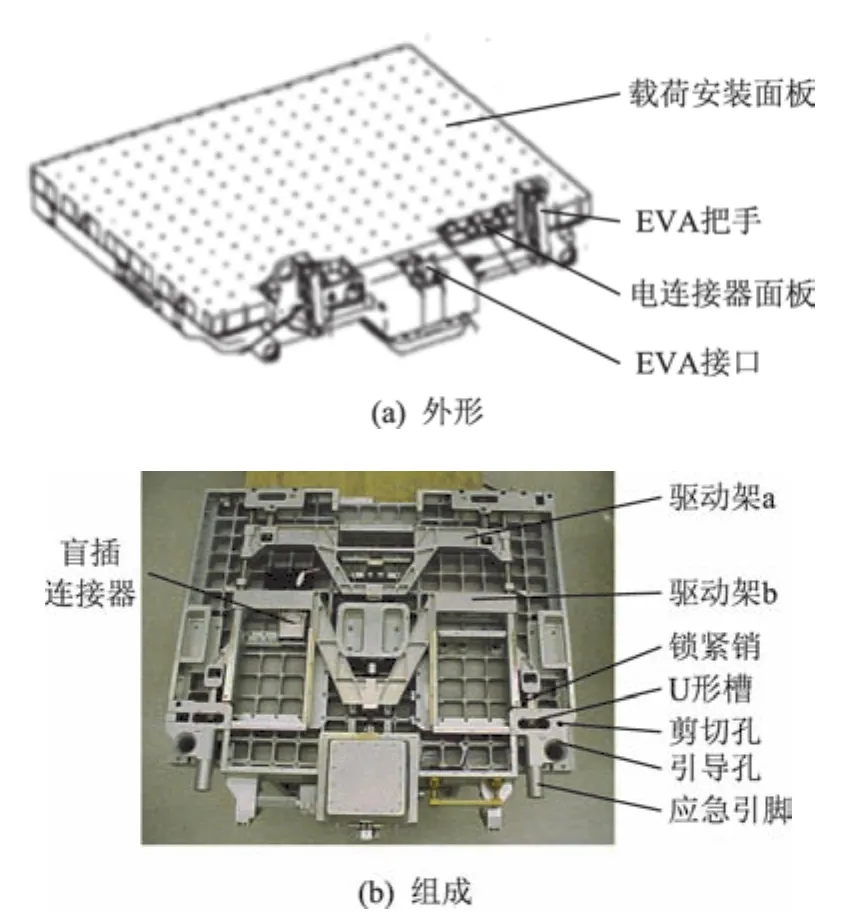
圖4 FRAM主動端外形及組成Fig.4 Figure and composition of FRAM active side
1.1.3 俄羅斯艙外載荷適配器
可重構通用工作站(URM-D,見圖5)是ISS中俄羅斯艙段暴露設施[21-23]的暴露模塊結構,其中包括艙外載荷適配器,為載荷提供電力、數據、機械連接。適配器由主動端和被動端組成。主動端安裝在URM-D上,由機體、方形適配孔、鎖緊裝置、絲杠、手柄、驅動架、防松裝置等組成。被動端安裝在載荷端,由載荷安裝孔、定位與鎖緊配合裝置、載荷安裝面組成。
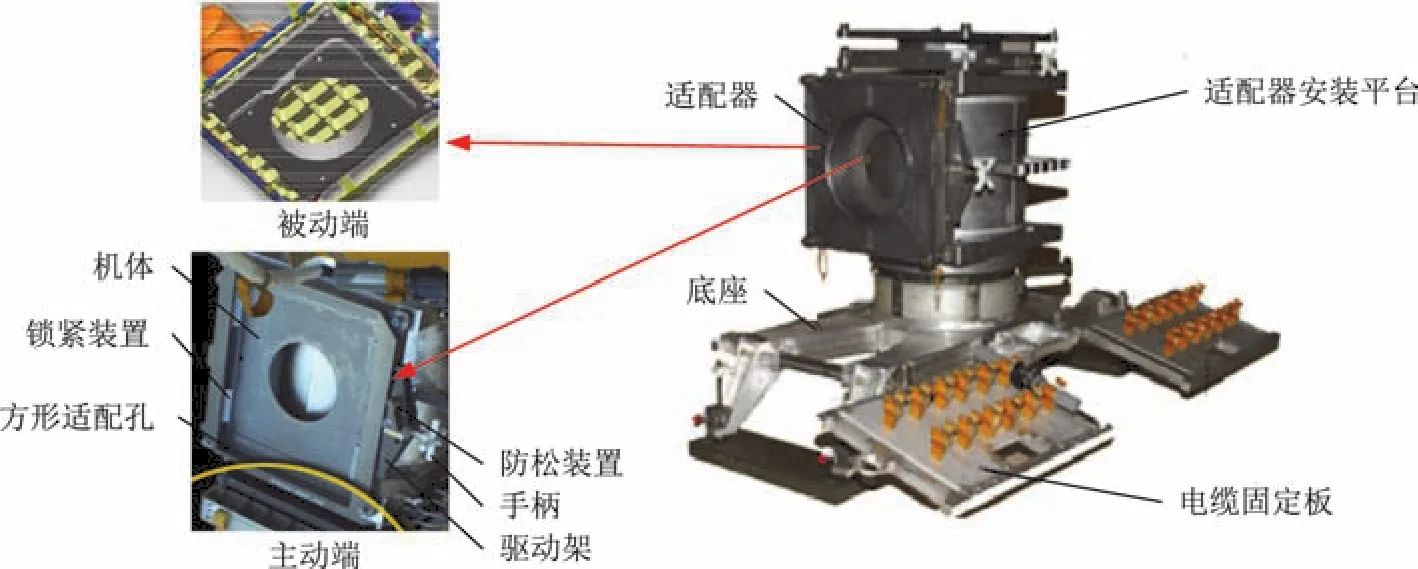
圖5 URM-D及其適配器組成Fig.5 Configuration of URM-D and its adapter
俄羅斯艙外載荷適配器功能實現方式如下。
(1)引導定位。通過航天員操作,基于銷孔配合原理,利用方形適配孔與方形銷的配合引導消除安裝于載荷端的被動端與安裝于平臺端的主動端之間的初始位置姿態誤差。
(2)機械鎖緊和電連接。基于螺紋絲杠副傳動原理,將航天員手臂提供的旋轉動力經放大轉化為軸向力,推動鎖緊裝置配合,實現載荷與平臺的機械鎖緊。電連接完全由航天員操作外置的電連接器實現。
俄羅斯艙外載荷適配器工作過程為:①航天員搬動載荷,隨著主動端方形適配孔的引導使主動端配合面與被動端配合面貼合;②航天員擰動適配器主動端的手柄鎖緊載荷。如需進行載荷的電連接,則需航天員再次手動操作電連接器。
1.1.4 美國“軌道快車”ORU界面
2007年,美國“軌道快車”[7,24]項目成功完成在軌飛行試驗,具備在軌捕獲、模塊更換和在軌加注等多項功能。ORU界面支持服務衛星ASTRO通過機械臂安裝更換目標衛星NEXTSat上的載荷,以延長目標衛星的壽命,提高在軌衛星的生存能力。ORU界面由主動端和被動端組成,見圖6。

圖6 ORU界面組成Fig.6 ORU interface composition
ORU界面功能實現方式如下。
(1)引導定位。在機械臂操作對接的過程中,基于銷孔配合原理,利用錐形孔與圓柱銷的配合引導消除初始位置姿態誤差。
(2)機械鎖緊和電連接。通過平臺端電力驅動的轉杯實現主動端和被動端的機械鎖緊和電連接。
ORU界面工作過程為:①服務星ASTRO上的機械臂調整ORU界面被動端與目標星NEXTSat上的ORU界面主動端的相對位置姿態,直到所有定位銷孔配合成功;②由主動端驅動2個轉杯實現主動端和被動端的機械鎖緊和電連接。
1.2 國內載荷適配器
我國在“十一五”期間開始了空間站載荷適配器[25-27]的研發工作,目前已完成引導定位裝置、捕獲鎖緊鎖等關鍵部件和潤滑技術、適配于機械臂的捕獲鎖緊技術的攻關,掌握了載荷適配器總體設計技術和對接動力學仿真方法,開展試驗樣機研制、動力學仿真等,驗證了與我國空間站實驗艙機械臂操作能力的匹配性。
我國載荷適配器設計借鑒ISS中美國FRAM基本形式和原理,由主動端和被動端組成,采用被動式(見圖7)。綜合考慮我國空間站機械臂、航天員艙外維修能力,采用電動為主、手動為輔的雙動力驅動鎖緊工作模式,通過先引導定位、同步捕獲,再機械鎖緊和供電、通信等連接的順序實現接口功能。主動端安裝在暴露載荷上,由捕獲鎖緊鎖、絲杠、螺母A、螺母B、定位銷等組成。被動端安裝在航天器端,由電路浮動連接器、液路浮動斷接器、定位孔等組成。

圖7 國內載荷適配器Fig.7 Payload adapter of China
國內載荷適配器功能實現方式如下。
(1)引導定位。載荷適配器要克服機械臂或航天員操作偏差,引導并校正載荷位置姿態,為下一步捕獲鎖緊連接建立前提條件。它通過主動端定位銷與被動端定位孔配合實現引導定位(見圖8)。當主動端定位銷通過被動端定位孔錐形開口引導落入定位孔后,依靠主動端定位銷圓柱段與被動端定位孔圓柱段的校正作用實現對位置姿態誤差的校正,使主動端和被動端達到捕獲要求,主動端捕獲被動端。

圖8 定位銷和定位孔Fig.8 Positioning pin and hole
(2)機械鎖緊和電連接。捕獲操作建立載荷適配器與機械臂或航天員之間的交互界面,并為下一步鎖緊連接建立前提條件。捕獲在機械臂或航天員操作對接的后半段進行,并向機械臂或航天員明確交會捕獲狀態,隨后機械臂或航天員依據交會信息進行下一步操作。為保證捕獲的可靠性和施力的均勻性,在對接面的4個角布置了捕獲鎖緊鎖。機械臂切換到隨動模式或航天員松開載荷后,載荷適配器的內部鎖緊連接機構動作首先精確校正載荷相對暴露平臺的位置姿態偏差,隨后進行電路浮動連接器、液路浮動斷接器的插合和機械鎖緊操作。4套捕獲鎖緊鎖共用1套驅動機構驅動,保證運動的同步性。同步驅動原理如圖9所示。

圖9 同步驅動原理Fig.9 Principle of synchronous driving
國內載荷適配器工作過程為:①載荷適配器主動端運行至捕獲狀態;②通過機械臂或航天員調整載荷端的載荷適配器主動端與被動端對接,并被捕獲;③由載荷適配器主動端電控鎖緊或由外接工具驅動鎖緊,完成電連接器的連接和機械鎖緊。
1.3 綜合分析
國內外載荷適配器主要技術特點總結見表1。對比分析可知:載荷適配器的設計和工作過程以機械臂和EVA的操作特性為基礎,核心為引導定位,其次為適配于引導定位的機械鎖緊與電連接。引導定位大多依據銷孔配合原理,對機械臂操作能力要求較高,但是降低了載荷適配器本身的復雜度。少數以鎖臂與V形導向槽配合實現引導定位功能,雖然功能強大,但是復雜度高。

表1 載荷適配器特點Table 1 Characteristics of payload adapters
2 關鍵技術分析
載荷適配器除涉及動力學、機構、控制等多個學科外,還特別涉及空間機械臂操作、人機工效學等學科,同時要適應復雜空間環境(低軌、高軌、深空等),滿足高可靠等工程要求。其中,最為關鍵的是適配于機械臂和EVA的操作特性,為此需要解決多個技術難題。
2.1 空間機械臂操作、人機工效學存在問題
空間機械臂技術、航天員EVA技術降低了載荷適配器的研制難度,但同時帶來了一系列新問題。ISS的絕大部分暴露載荷與平臺之間以通用的載荷適配器集中安裝于暴露平臺上,通過空間機械臂及航天員EVA進行暴露載荷的安裝與回收,出現故障后由航天員EVA進行維修操作。通過機械臂或機械臂配合EVA進行暴露載荷的安裝和更換,極大地提高了暴露資源的利用效率和靈活性,但存在以下問題需要解決。①無法精確定位。機械臂的操作精度有限(見表2),同時航天員EVA時人工直接操縱帶來誤差,造成載荷無法直接精確定位。②驅動力不足。機械臂的功率限制及機械臂長臂結構的影響,造成機械臂輸出力有限,同時在EVA時處于失重狀態的航天員操作力有限,導致無法直接完成載荷的鎖緊連接/拆卸。

表2 ISS上機械臂主要參數Table 2 Main parameters of ISS arms
2.2 關鍵技術
機械臂、航天員操作無法精確定位、驅動力不足,同時對接過程碰撞、機構運動復合,因此設計中要依據機械臂、航天員操作特性進一步明確載荷適配器的工作模式,確定關鍵部件及協同關系,同時融入人機工效學設計,攻克地面試驗關鍵技術,以保證機械臂或航天員操作動力學和機構動力學的匹配。
(1)工作模式。機械臂、航天員操作下,載荷適配器首先要通過引導定位初步校正操作誤差,并在引導定位的過程中進行同步捕獲(為機械臂與載荷適配器提供明確的任務界面),隨后主動精確校正操作誤差,最后進行電路浮動連接器、液路浮動斷接器的連接和機械鎖緊。
(2)關鍵部件及協同關系。按照工作模式,載荷適配器利用大量部件實現其功能,如引導定位裝置在機械臂或航天員操作載荷對接時全過程進行導向定位,捕獲鎖緊鎖在對接過程同步進行捕獲,電路浮動連接器、液路浮動斷接器在載荷適配器鎖緊過程進行連接,捕獲鎖緊鎖在載荷適配器工作過程最后階段進行機械鎖緊,其工作過程存在交叉和重疊,性能要求較高。機械臂操作模式下,對接過程中進行同步捕獲將為機械臂與載荷適配器提供明確的任務界面,捕獲鎖緊鎖設計首先避免影響引導定位裝置的對接,同時在較大范圍內可靠捕獲及準確檢測捕獲狀態,為機械臂預留一定的活動空間。
(3)人機工效學。失重狀態的航天員在艙外操作載荷對接時身穿笨重的艙外航天服,難以施力和判斷,造成操作困難,進而對操作對象的人機功效學要求高。在載荷適配器設計階段要針對航天員艙外操作進行專項設計,對產品進行充分的人機功效學評價。在航天器整體設計時,應用系統要合理布局、統一規劃,為載荷適配器預留充足的操作空間,使正常操作與應急操作成為可能。
(4)地面試驗。機械臂操作艙外載荷對接時,需要執行復雜而精細的操作。載荷適配器由大量活動部件同步協調工作,以保證載荷能夠可靠對接、鎖緊,電氣、液路連通。由于航天產品的地面試驗子樣少、可靠性安全性要求高、真實在軌環境難以模擬、系統聯試試驗有限且節點與產品研制過程難以匹配等特殊要求和約束,需通過合理規劃、模擬在軌工作狀態,利用有限的真實機械臂和產品進行充分的系統試驗、單機試驗等,充分驗證載荷適配器在各種環境、使用工況中的性能和功能。
3 啟示與建議
隨著以機械臂技術為代表的智能機構技術的應用,基于機械臂技術和航天員EVA的載荷適配器技術取得了長足發展,多種形式的載荷適配器在ISS上進行了大量應用,尤以被動式的載荷適配器占多數。隨著在軌服務任務需求的發展,載荷適配器將會在未來在軌服務技術發展中占據重要地位。隨著我國航天技術的發展,載荷適配器技術發展路線應基于國內需求、技術基礎及未來在軌服務等發展趨勢制定,建議從以下幾個方面考慮。
(1)結合國內潛在需求,針對未來先進載荷任務需求,開展類似于日本EEU的功能強大、承載能力強的主動式載荷適配器系統研究。主動式載荷適配器系統在起始階段通過爪類機構捕獲對應導向結構主動消除初始位置姿態誤差,適應機械臂操作尺寸質量較大的載荷;然后利用銷孔類配合實現精確定位;最后由專用機構單獨進行供電、通信、液路等資源的連接,實現強大的資源連通能力。針對大量常規的載荷任務需求,開展通用化、標準化被動式載荷適配器的研制,采用電動和機械臂操作為主的工作模式,降低對航天員EVA資源的占用。針對小型、少量、非常規、無源且長期暴露實驗載荷任務需求,開展利用航天器艙外把手、桁架等結構資源的純手動操作式載荷適配器的研制,充分利用航天器的暴露資源。
(2)針對大型高軌航天器等在軌模塊更換、模塊補充升級、功能重構、載荷更替、載荷增加等需求,開展高可靠、可重復、自適應、可大量布置的被動式載荷適配器技術研究。通過錐形定位孔和銷的配合引導定位、同步捕獲,建立與操作者的對接交互界面;按照機械鎖緊和資源連接的順序實現接口功能,采用電動為主驅動鎖緊工作模式,充分利用機械臂的操作能力使載荷適配器向小型、輕量化發展,支撐在軌服務的發展。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09