GNSS測定地球自轉參數精度分析
2019-05-09 06:32:22郭忠臣
沈陽大學學報(自然科學版) 2019年2期
郭忠臣, 姚 翔
(1. 宿州學院 環境與測繪工程學院, 安徽 宿州 234000;2. 江蘇金地勘測有限公司, 江蘇 南京 210000)
地球自轉參數(earth rotation parameters,ERP)包括極移和日長變化, 是實現地球參考框架(ITRF)和天球參考框架(ICRF)之間互相轉換的必要參數, 對衛星導航和深空探測等領域具有重要意義[1-2]. 目前,主要利用現代空間大地測量技術(SLR、VLBI、GNSS、DORIS、LLR)測定ERP, 但由于各種技術本身的限制, 為獲得高精度ERP,需多種技術組合解算[3].SLR、VLBI等技術觀測精度高, 但設備昂貴,觀測資料較少, 難以普及. GNSS觀測站在全球分布廣, 設備成本低,且采樣率高,觀測資料充足, 因此GNSS技術成為當前高精高分ERP測定的主要技術[1,4]. 由于GPS技術已經相對成熟[5], 不少學者對利用GPS觀測數據測定ERP進行了研究, 姚宜斌[6]、何戰科等[7]分別利用GPS的SINEX文件和觀測文件等資料解算ERP, 并將結果與權威機構發布值進行對比, 解算結果中極移方向均存在明顯的系統誤差;王新靜等[8]通過研究約束軌道,選擇先驗信息和站點等內容給出了提高GPS觀測資料解算ERP精度的新策略; 魏二虎等[9]研究了聯合GPS和VLBI技術對ERP測定精度的影響, 結果表明聯合后可有效提高解算精度和可靠性. 隨著BDS和Galileo系統的逐漸完善, 觀測資料逐漸增多,對其測定ERP的精度進行研究也具有一定意義. 本文使用不同衛星導航系統的觀測數據解算ERP, 對后續研究可以起到一定的參考作用.
1 ERP測定原理
根據衛星導航系統的基本原理,GNSS觀測方程可表示為[10]

(1)



式中:λ為載波波長;φ為相位觀測值;N為整周模糊度;dts為衛星鐘差;dtr為接收機鐘差;dt為對流層誤差;di為電離層誤差;dm為多路徑誤差;dr為相對論誤差;dε為觀測噪聲的等效距離誤差;Xs,Xr分別表示在地固坐標系下衛星和測站的坐標;R為地固坐標系和慣性坐標系之間的旋轉矩陣,表達式如下:
R=P·N·S·U.(3)
式中,P、N、S、U分別表示歲差、章動、自轉和極移旋轉矩陣[10].
對觀測方程做線性化處理,可得
(4)

(5)
式中:GAST為格林尼治視恒星時;γ≈1.002 737 909 3;t和t0分別為觀測時刻和所選參考時刻的儒略日.
當給定觀測時刻及相應的ERP初始值,可得基于GNSS觀測數據求解ERP的線性化觀測方程.若某時刻地面有n個觀測站,每個觀測站觀測到m顆衛星,則有觀測方程組[11]
A(n×m)×3X3×1=L(n×m)×1,P(n×m)×(n×m).(6)
式中:A為系數矩陣;X為未知參數矩陣;L為常數項矩陣;P為觀測值權矩陣.
若觀測了k個歷元,則通過迭代最小二乘平方差即可求得最終ERP,即:
(7)
2 實驗分析
觀測站的分布及數量對ERP測定精度的影響較大[8,12],本文將在相同觀測站的基礎上,對不同衛星導航系統觀測數據測定ERP的精度進行分析. 選用在全球范圍內平均分布的70個國際多模GNSS監測站網(MGEX)的觀測數據測定ERP,實驗采用的計算軟件為德國地學研究中心葛茂榮博士提供的高精度GNSS數據處理軟件,衛星軌道和ERP初值分別來自廣播星歷和IERS Bulletin A,測站坐標來自國際GNSS服務發布產品(international GNSS service, IGS)公布的SINEX文件,解算時間為2015年11月16日—2015年11月27日,年積日為320~331 d,每天為一個解算時段,部分解算參數設置見表1[13].
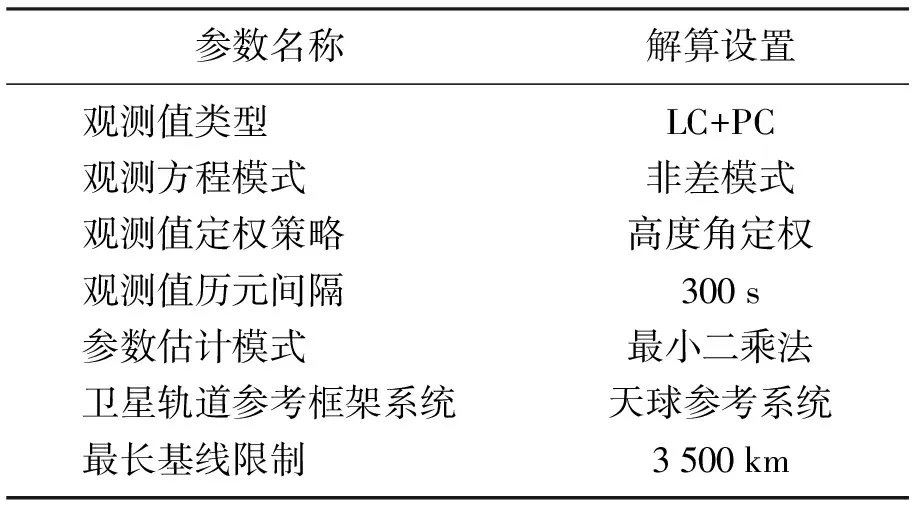
表1 基本參數設置情況Table 1 The setting of basic parameter
為分析北斗衛星導航系統觀測數據測定結果的精度,分別將測定結果與GPS、GLONASS、Galileo三個系統觀測數據測定的ERP進行對比,并將4個系統觀測數據測定結果與IGS(ftp:∥cddis.gsfc.nasa.gov/pub/gnss/products)發布的ERP最終產品進行對比,解算結果見圖1(GPS、BDS、GLONASS、Galileo分別簡寫為G、C、R、E).
通過對圖1數據分析可知:
(1) 4個系統測定結果中GPS測定結果的精度和穩定性均最高,極移X方向(PMX)和極移Y方向(PMY)分量差值的MEAN和RMS分別為-119.58×10-6(″)、106.40×10-6(″)和313.75×10-6(″)、73.22×10-6(″);日長變化差值的MEAN和RMS為-18.32 μs和25.09 μs.GLONASS次之,BDS測定較差,BDS測定PMX和PMY分量差值的MEAN和RMS分別為429.75×10-6(″)、838.12×10-6(″)和570.25×10-6(″)、283.06×10-6(″);日長變化差值的MEAN和RMS為-160.79 μs和114.38 μs,Galileo測定結果最差,PMX和PMY分量差值的MEAN和RMS分別為-315.58×10-6(″)、1 655.70×10-6(″)和-41.58×10-6(″)、1 180.25×10-6(″),日長變化差值的MEAN和RMS為-39.26 μs和258.80 μs.
(2) PMX分量測定結果與IGS發布產品具有一致性,測定誤差均在0附近波動,而PMY方向誤差存在一定的系統偏差性,主要是由于本文所用解算策略中的部分參數設置與IGS所用不一致引起的.

圖1 GNSS各系統解算結果與IGS最終產品的差值Fig.1 Difference between GNSS system solution results and IGS final product
3 結 論
本文通過對同一時間內不同衛星導航系統觀測數據進行實驗, 利用其觀測數據測定ERP, 并將結果與IGS發布的最終產品相比. 結果表明: 使用各個系統的觀測數據單獨解算ERP時, 解算精度由高到低依次為: GPS、 GLONASS、 BDS、 Galileo, 這是因為GPS可用衛星數較其他3個系統多, 得到的觀測數據量最多, 并且質量好. 截至目前, Galileo衛星導航系統只有4顆可用衛星, 遠遠低于其他3個系統. 衛星系統的可用衛星數目及其空間分布對數據處理成果的質量有著決定性作用, 為我國實現早日提供各類高精度產品, 加快北斗衛星導航系統的建設尤為重要.
