自動搶接止回閥裝置液壓系統設計及仿真分析*
2019-05-09 01:01:06張飛凡劉先明胡書闖
中國安全生產科學技術 2019年4期
關鍵詞:設計
張飛凡,管 鋒,劉先明,胡書闖,黃 鵬
(1. 長江大學 機械工程學院,湖北 荊州 434023; 2.中國石油川慶鉆探工程有限公司 鉆采工程技術研究院,四川 廣漢 618300)
0 引言
在井涌初期井噴流量較小、鉆井液中不包含有毒氣體的情況下,現場工作人員可直接在井口進行施工作業,止回閥通常能成功地與鉆具配合,完成防噴作業。若井噴的流量較大、噴出的鉆井液中含有毒氣體,操作人員無法靠近井口,則無法搶裝鉆具止回閥,勢必造成井噴失控,對現場以及周邊居民的人身財產安全構成較大威脅[12]。因此,設計一款自動搶接止回閥裝置具有重要的現實意義。
國內外研究機構和石油機械公司已經報道了諸多關于井口安全裝置的研究成果。現階段,對于實現鉆具內部的防噴作業,各大鉆井公司一般使用鐵鉆工或者液氣混合動力大鉗來輔助鉆具止回閥完成防噴作業。例如,美國國民油井瓦克公司的ST-80 和IR3080搖臂式鐵鉆工[3]、德克薩斯第一工業公司的EZ80 型緊湊型落地式鐵鉆工[4]、Kongshavn Industi 公司的off shore product 落地式鐵鉆工、2007 年南陽市奧達石油機械有限公司生產的便攜式鐵鉆工、特達公司2004年生產的ZQ203-75X 型鉆桿鉗[5]等均采用液壓系統作為裝置的動力系統,主要利用液壓系統提供大扭矩,用以完成止回閥與鉆具的安裝。整套系統需要現場工作人員把止回閥運移至井口,進行輔助安裝,最終實現鉆具止回閥的搶裝。這些研究標志著鉆具止回閥能夠成功使用于緊急情況下的井噴作業。2008年川慶鉆探鉆采工藝技術研究院研制了失控井搶接鉆具止回閥機械手[6-8],裝置利用液壓系統,實現了對止回閥的夾持、運移與安裝,但仍需要現場工作人員操作止回閥與鉆具的對準操作,輔助完成防噴作業。這種機械手的出現實現了鉆具止回閥的半自動搶裝。
本文設計出自動搶接止回閥裝置的三維模型,并基于AMEsim對其液壓系統進行仿真分析,確保液壓系統能夠滿足裝置的運行要求。
1 自動搶接止回閥裝置
本文設計的自動搶接止回閥裝置是一款自主設計研究、具有良好的運行平穩性且效率較高的井口自動化工具,主要用于鉆采石油的鉆井過程中發生溢流、井噴時的關井防噴作業。其運行過程不需要現場工作人員的參與,可極大程度地減少工作人員的操作量,以此來確保工作人員的人身安全。
根據自動搶接止回閥裝置的安裝位置以及完成的動作,本文設計了裝置的執行單元,其中包括:旋轉單元、伸縮單元、升降單元及旋扣單元,如圖1所示。

圖1 自動搶接止回閥裝置結構Fig.1 Automatic snap check valve device
發生井噴狀況時,現場的工作人員需要處理緊急事故。自動搶接止回閥裝置的設計依據工作人員積累的工作經驗,提出了一系列工程技術參數。技術參數如表1所示。

表1 自動搶接止回閥裝置的主要技術參數Table 1 Main technical parameters of automatic snap check valve device
發生井噴時,自動搶接止回閥裝置需要完成以下步驟:1)旋轉單元工作,帶動前臂部分整體旋轉至指定位置;2)伸縮單元工作,三級液壓缸伸出至井口上方;3)升降單元工作,鉗頭部分下降,止回閥與鉆具對準(保證誤差范圍內的中心對準);4)旋扣單元工作,旋扣鉗帶動止回閥旋轉上扣,防噴作業完成;5)井底壓力穩定后,按與工作步驟相反的順序收回。自動搶接止回閥裝置的工作流程如圖2所示。

圖2 自動搶接止回閥裝置的工作流程Fig.2 Automatic snap check valve device workflow
2 自動搶接止回閥裝置液壓系統設計及建模
2.1 自動搶接止回閥裝置液壓系統設計
出于對完成防噴作業時間限制的考慮,在設計旋轉單元的核心執行元件時,將輸出扭矩和輸出轉速作為計算的基本參數。旋轉單元的傳動方式采用立柱套裝回轉支承與齒輪傳動。在預留位置安裝液壓馬達作為旋轉單元的動力源。根據理論計算得到的參數,旋轉單元的液壓馬達選為Bm5-160型擺線液壓馬達。
由于鉆井平臺的面積有限,要求在待命狀態下,裝置占用空間位置較小。將三級液壓缸作為伸縮單元的核心執行元件[9],著重把裝置承受的上頂力(見表1)作為設計的基本參數。三級液壓缸的主要參數如表2。

表2 伸縮單元中三級液壓缸主要參數Table 2 Main parameters of three-stage hydraulic cylinder in expansion unit
升降單元中的核心執行元件,其主要功能是把旋轉運動轉化為直線運動,為保證裝置運行的可靠性,把升降單元的傳動方式選為絲杠傳動。扭矩計算為:
(1)
式中:Ta為驅動力矩,Nm;Fa為軸向負載,N;F為上頂力的二分之一;μ為導向件的綜合摩擦系數;m為移動物件重量,kg;g為重力加速度,m2·s-1;I為絲杠導程,mm;η為進給絲杠的正效率。基于計算得到的參數,升降單元的液壓馬達選為Bm5-125型擺線液壓馬達。
旋扣單元的功能是夾持止回閥、旋扣。主要把旋扣鉗力矩(表1)和旋扣鉗的輸出轉速作為設計的基本參數。為保證止回閥工作的穩定性,液壓馬達安裝的便捷性,旋扣單元的傳動方式采用的是蝸輪蝸桿傳動。基于計算得到的參數,旋扣單元的液壓馬達選為Bm6-195型擺線液壓馬達。
根據自動搶接止回閥裝置的執行單元和裝置完成防噴作業的工作過程,本文設計了裝置的液壓回路簡圖,如圖3所示。

1.溢流閥;2. 液壓泵;3,6,8,11.三位四通電磁閥;4,9,12. 液壓馬達;5,10,13. 等效的旋轉負載;7. 三級液壓缸圖3 自動搶接止回閥裝置液壓回路Fig.3 Hydraulic circuit of automatic snap check valve device
2.2 自動搶接止回閥裝置液壓系統建模
根據圖3,建立AMESim液壓仿真模型,如圖4所示。液壓系統模型均采用AMESim 液壓元件庫、機械元件庫和HCD庫搭建。AMESim 軟件給機電液一體化系統的創新型設計提供了較好的建模仿真環境,廣泛應用于工程研究[10-13]。

1.液壓源;2.溢流閥;3.弱電指令輸入;4.三位四通電磁換向閥;5.雙向液壓馬達;6.離合器;7.齒輪副傳動;8.等效的旋轉載荷;9.三級液壓缸;10.蝸輪蝸桿副傳動圖4 自動搶接止回閥裝置液壓系統模型Fig.4 Hydraulic system model of automatic snap check valve device
3 自動搶接止回閥裝置液壓系統仿真及分析
楊洋、趙斌等[14-15]利用AMEsim軟件對混合動力車、液壓大鏟進行仿真,并根據仿真結果對整個裝置的運行狀況進行評價。本文主要分析對象包括:旋轉單元、升降單元和旋扣單元液壓馬達的仿真結果(輸出扭矩和輸出轉速);伸縮單元的仿真結果:液壓缸的位移曲線。
根據前文介紹的裝置的運行過程,如圖2所示。4個執行單元的工作過程均是由三位四通電磁換向閥操控,其閥芯的換位可操作執行單元的工作狀態。
3.1 旋轉單元的仿真及分析
旋轉單元承受的主要負載包括:前臂、旋扣鉗和止回閥的質量。旋轉單元完成動作需要5 s,在設置仿真參數時,把旋轉單元完成動作的時長作為三位四通電磁換向閥換向的時間間隔。仿真結果如圖5、6所示。

圖5 旋轉單元液壓馬達輸出轉速曲線Fig.5 Output speed curve of hydraulic motor of rotary unit

圖6 旋轉單元液壓馬達輸出扭矩曲線Fig.6 Output torque curve of hydraulic motor of rotary unit
圖5、6分別為旋轉單元液壓馬達輸出轉速、扭矩曲線。從圖中可以看出,響應曲線較平滑無明顯振蕩;在該單元的運行時長內,液壓馬達的輸出轉速與輸出扭矩均能迅速增大,最后穩定大于其出廠性能參數中的輸出轉速(85 r·min-1)與輸出扭矩(286 Nm),而出廠性能參數中的輸出轉速與輸出扭矩大于設計計算的理論轉速(83 r·min-1)與理論扭矩(245 Nm),說明選型的液壓馬達能夠滿足裝置運行的轉速與扭矩要求。
3.2 伸縮單元的仿真及分析
伸縮單元承受的主要負載包括:旋扣鉗和止回閥的質量,前臂的部分質量。三級液壓缸完成動作需要30 s,于是在設置仿真參數時,把伸縮單元完成動作的時長作為指令三位四通電磁換向閥換向的時間間隔。仿真結果如圖7所示。

圖7 伸縮單元三級液壓缸閥芯位移曲線Fig.7 Displacement curve of valve core of three-stage hydraulic cylinder of expansion unit
圖7為伸縮單元中三級液壓缸的活塞桿的位移曲線。三級液壓缸由2級活塞缸和一級活塞桿配合組裝而成,活塞桿的位移是一級活塞缸、二級活塞缸和三級活塞桿三者位移的疊加。從圖7中可以看出,該位移響應曲線較平滑、無明顯振蕩;在設置的運行時長內,三級液壓缸的活塞桿能夠達到指定位置(1.41 m),說明設計的三級液壓缸能夠滿足裝置運行的空間限制、支撐長度的要求。此外,還可以看出活塞桿位移曲線明顯遲滯。原因是:考慮到缸筒與活塞桿間的摩擦及鉗頭部分的質量等因素,在液壓站的流量不變的情況下,三級液壓缸壓力升高,液壓回路中的壓力升高,導致溢流閥開啟,液壓油回流油箱,而活塞桿的位移與流量成正比。
3.3 升降單元的仿真及分析
升降單元承受的主要負載包括:旋扣鉗和止回閥的質量。前臂完成動作需要5 s,在設置仿真參數時,把升降單元完成動作的時長作為三位四通電磁換向閥換向的時間間隔。仿真結果如圖8,9所示。

圖8 升降單元液壓馬達輸出轉速曲線Fig.8 Output speed curve of hydraulic motor of lifting unit

圖9 升降單元液壓馬達輸出扭矩曲線Fig.9 Output torque curve of hydraulic motor of lifting unit
圖8,9分別為升降單元液壓馬達輸出轉速、輸出扭矩曲線,從圖中可以看出,響應曲線較平滑無明顯振蕩;在該單元的運行時長內,液壓馬達的輸出轉速與輸出扭矩均能夠迅速增大,最后穩定大于其出廠性能參數中的輸出轉速(230 r·min-1)與輸出扭矩(240 Nm),而出廠性能參數中的輸出轉速與輸出扭矩均大于設計計算的理論轉速(225 r·min-1)與理論扭矩(165.9 Nm),說明選型的液壓馬達能夠滿足裝置運行的轉速,扭矩要求。
3.4 旋扣單元的仿真及分析
旋扣單元承受的主要負載:止回閥的質量。前臂完成動作需要5 s,在設置仿真參數時,把旋扣單元完成動作的時長作為三位四通電磁換向閥換向的時間間隔。仿真結果如圖10,11所示。

圖10 旋扣單元液壓馬達輸出轉速曲線Fig.10 Output speed curve of hydraulic motor of spinner unit
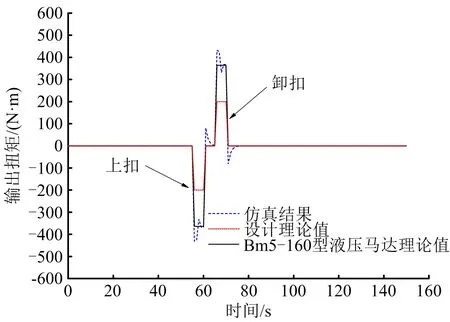
圖11 旋扣單元液壓馬達輸出扭矩曲線Fig.11 Output torque curve of hydraulic motor of spinner unit
圖10,11分別為旋扣單元液壓馬達輸出轉速、輸出扭矩曲線,從圖中可以看出,響應曲線較平滑無明顯振蕩;在該單元的運行時長內,液壓馬達的輸出轉速、輸出扭矩均能夠迅速增大,最后穩定大于其出廠性能參數中的輸出轉速(660 r·min-1)與輸出扭矩(364 Nm),而出廠性能參數中的輸出轉速與輸出扭矩均大于設計計算的理論轉速(631 r·min-1)與理論扭矩(200 Nm),說明選型的液壓馬達能夠滿足裝置運行的轉速、扭矩要求。
由圖5、6以及圖8~11中的仿真結果可以看出:
1)液壓馬達輸出轉速、輸出扭矩達到最大值的時間明顯遲滯于設計計算的理論值與液壓馬達的出廠性能參數。原因是:液壓馬達均帶有負載,導致系統內的壓力及排量波動,從而導致輸出轉速升至最大值的過程用時較長。
2)液壓馬達輸出轉速、輸出扭矩降為零的過程較準確,但有反向增大的趨勢。原因是:各單元模塊完成動作后,三位四電磁換向閥動作,閥芯換位,液壓馬達停轉,等效的轉動慣量會產生慣性力矩,導致液壓馬達輸出轉速出現波動,尤其表現在閥芯換位時,輸出扭矩會有一個反向的增大趨勢。
4 現場應用
將文中設計的自動搶接止回閥裝置交付中國石油川慶鉆探工程有限公司鉆采工程技術研究院試用。試用過程中,裝置能穩定、準確地完成指定動作:1)旋轉單元能夠完成整個前臂部分的旋轉與收縮;2)伸縮單元能完成前臂的伸縮,另外添加支撐部分,以確保伸縮單元有足夠的支撐穩定性;3)升降單元能在旋扣鉗到達指定位置后,完成升降動作;4)旋扣單元能保證止回閥與鉆具的上扣與卸扣。裝置的實際應用如圖12所示。

圖12 自動搶接止回閥裝置的現場應用Fig.12 Field drawing of automatic grab check valve device
5 結論
1)經過系列的計算與校核,完成了對自動搶接止回閥裝置的結構設計和液壓系統的設計,設計出一種可全自動安裝鉆具止回閥的自動搶接止回閥裝置。
2)基于AMESim研究得到的液壓馬達的輸出特性,驗證了設計、選型的三級液壓缸與液壓馬達能夠滿足裝置的運行要求。由于仿真過程中,等效成轉動慣量的旋轉負載產生的額慣性力矩較大,三級液壓缸與液壓馬達的輸出特性雖存在小范圍的波動,但誤差均小于10%,由此可見,設計的自動搶接止回閥裝置的理論模型能夠全自動地完成防噴作業。
3)完成裝置的調試后,通過實驗鉆井平臺的水壓試用,自動搶接止回閥裝置的液壓系統設計合理,裝置在接受指令后,動作完成的可靠度高。此結果可使裝置的安全性得到大大提高,起到指導現場作業的效果。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
