基于Wilcoxon的仿射投影算法
2019-05-08 03:26:30李琳琳
微處理機 2019年2期
關鍵詞:信號
李琳琳,郭 瑩
(沈陽工業大學信息科學與工程學院,沈陽110870)
1 引言
最小均方算法(Least Mean Square,LMS)因其形式簡單、魯棒性強而被廣泛應用于未知線性系統的辨識。然而在許多實際環境中,由于自然因素和人為因素的影響,噪聲通常表現出強沖擊性,即存在異常值,這并不符合高斯分布。Majhi等人提出了通過Wilcoxon范數代替歐式范數作為代價函數,以改善LMS對異常值的失調性能。在這種方法中,不是將誤差項的平方最小化,而是將與每個誤差值相關的等級最小化。等級是通過對一個數據塊獲得的誤差值進行排序來計算的。這種強大的技術已被應用于系統識別[1-3]。然而,當輸入信號相關性較高或者輸入信號是有色信號時,LMS算法的收斂速度會明顯降低。為了克服這一問題,Ozeki和Umeda提出仿射投影算法(Affine Projection Algorithm,APA)。但是當噪聲呈現非高斯脈沖分布時,經APA得到的解將不是最優解[4]。針對非高斯噪聲干擾問題,S.J.Ban等人提出了基于Wilcoxon范數的仿射投影算法(Wilcoxon Affine Projection Algorithm,WAPA),通過最小化加權Wilcoxon范數來克服APA算法的不足[5]。
根據Sign-Sign Wilcoxon比Sign Wilcoxon算法具有更好的收斂速度這一思想,可認為Sign-Sign Wilcoxon仿射投影算法(Sign-Sign WAPA)相比于Sign Wilcoxon仿射投影算法(Sign WAPA)在存在異常值時具有更快的收斂速度[6]。但是Sign-Sign WAPA的步長是固定的,在參數選擇和收斂速度方面有一定的局限性。故此,提出變步長符號-符號仿射投影算法(Variable Sign-Sign WAPA),通過引入步長函數,可很好地解決這一問題[7]。
對 APA、WAPA,Sign WAPA,Sign-Sign WAPA,Variable Sign-Sign WAPA進行綜合比較分析。仿真研究表明,在具有高相關輸入數據和輸出數據存在非高斯噪聲的條件下,與其他算法相比,Variable Sign-Sign Wilcoxon APA具有更好的性能。
2 Alpha穩定分布
Alpha穩定分布是高斯分布的一種推廣,非常適合描述帶有脈沖性質的實際環境噪聲[7]。Alpha穩定分布不存在閉合形式的概率密度函數,因此可用一般特征函數描述。對隨機變量X,其特征函數可以描述為:

其中,

Alpha穩定分布的表現由四個參數α、β、δ、γ決定;其中α是特征指數,取值范圍為0<α≤2,決定著Alpha穩定分布脈沖性的強弱,當α=2時表示分布為高斯分布;β是對稱參數,取值范圍為-1<β≤1,當β=0時為對稱Alpha穩定分布或稱SαS分布;δ為位置參數,取值范圍為-∞<δ<∞;γ為分散系數,取值范圍為γ>0。α在不同取值條件下所對應的概率密度函數曲線如圖1所示。
由圖1可以看出當特征指數α=2時,SαS概率密度函數曲線與實質上均值為零且方差為2的高斯分布曲線保持一致。SαS分布概率密度函數的拖尾厚薄程度變化受α值的影響,隨著特征指數α的減小,拖尾變厚,表現出更強的脈沖性。因此,SαS分布非常適合用來描述那些類似于高斯分布,卻具有很強沖擊性的非高斯分布。

圖1 特征指數α在不同取值下的概率密度函數曲線
3 Wilcoxon估計
在統計中,使用基于秩的Wilcoxon生成的線性回歸器對異常值不敏感。對于線性最小二乘回歸和線性Wilcoxon回歸對異常值的魯棒性的差異,可用以下示例進行比較。
示例由圖2給出,其中包含20個數據樣本點并存在30%的異常值。真實函數為y=10x+2。以最小二乘方法得到的回歸線性方程為y=8.3395x+6.9395,而由Wilcoxon方法得到的結果為真實函數y=10x+2。回歸結果亦如圖2所示。

圖2 最小二乘估計與Wilcoxon估計比較

圖3 函數關系 w ?的曲線
4 Wilcoxon范數
Wilcoxon范數的定義需要一個單調遞增的記號函數φ φ(( uu ))::[[00,,11]]→→R? ,且滿足:

其中,記號函數φφ被定義為:
其中n=1,2,...,l。l為固定的正整數。
令向量v∈∈?Rll, 則其Wilcoxon范數被定義為:

Sign Wilcoxon范數則為僅將記號函數前加入“符號”,定義為:

5 Wilcoxon APA算法
在數據重組中,將最后的L個輸入信號向量寫為如下的矩陣形式:

輸出向量y(n)可以表示為:


APA算法的權系數向量更新公式為:

同時為了防止自相關X(n)XT(n)太小,算法中還可引入一個非常小的正整數,APA算法的權系數向量更新公式變為:

其中,ε是正則化因子,I為M×M的單位矩陣,εI是為避免對不滿秩方陣求逆而添加的一個對角矩陣。
基于公式(12),Wilcoxon范數APA的權系數更新公式可以寫成:

Wilcoxon APA算法的代價函數為:

對代價函數J(n)關于W(n+1)求偏導,則:

Wilcoxon范數APA算法的權系數更新公式為:
根據式 (7)、(16),Sign Wilcoxon范數 APA 算法的權系數更新公式為:

6 變步長Sign-Sign WAPA
在有異常值存在的情況下,設計一個能有效地估計其參數的模型。Wilcoxon范數和Sign Wilcoxon范數存在異常值時都能顯現出良好的魯棒性。與傳統方法相比,Sign-Sign技術有更快的收斂速度。在Sign-Sign Wilcoxon方法中,誤差向量和記號函數都用符號函數來表示。Sign-Sign WAPA算法的權系數更新公式為:
利用固定的步長參數μ描述權值更新方程,固定步長自適應算法僅能有效地跟蹤緩慢運動的參數化,因此固定步長Sign-Sign Wilcoxon方法不能產生比變步長更好的結果。由于步長參數起著至關重要的作用,為了構造更加魯棒的系統,應對自適應算法進行變步長改進。瞬時步長定義為:

其中,μi是在所提出的自適應算法中使用的瞬時步長值。Δμ定義為固定步長的初始值,S=X(n)e(n),sp為s上一次迭代的值。最后的步長大小定義為:
其中μmin和μmax定義為該算法的最小步長和最大步長,步長的大小可以在μmin和μmax之間選擇。
至此Variable Sign-Sign WAPA算法的最終更新方程為:

隨后可將Variable Sign-Sign WAPA算法和其他算法在高斯噪聲和非高斯噪聲下進行對比驗證。
7 實驗仿真
為驗證所提算法的收斂速度、穩態失調及其跟蹤的性能,對幾種相關算法用MATLAB進行仿真。算法的收斂性能是以歸一化均方偏差(Normalized Mean Square Deviation,NMSD)的收斂曲線來評價的,定義為:

可見NMSD是對自適應濾波器與目標系統的逼近程度的度量。
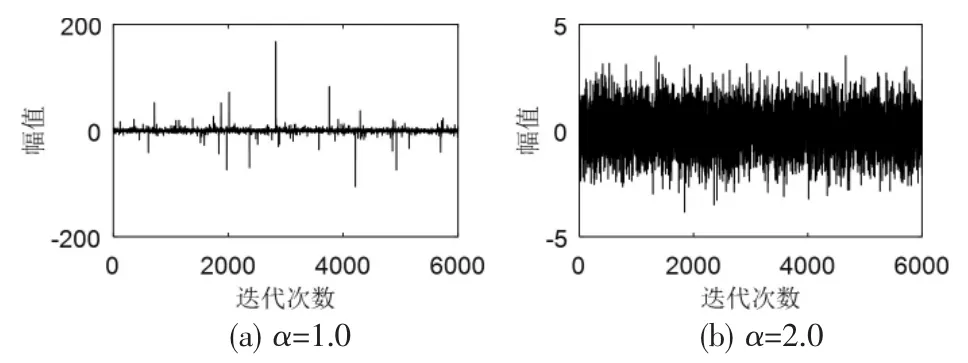
圖4 不同高斯干擾條件下α穩定噪聲
圖5為APA、WAPA、SignWAPA、Sign-SignWAPA和Variable Sign-Sign WAPA在高斯噪聲條件下的NMSD收斂曲線。

圖5 高斯噪聲下各算法的性能比較
由圖中可見,當干擾噪聲為高斯噪聲時,所提的 Variable Sign-Sign WAPA比 Sign-Sign WAPA、Sign WAPA、WAPA、APA都要具有更快的收斂速度和較小的穩態失調。
圖 6為 APA、WAPA、Sign WAPA、Sign-Sign WAPA和Variable Sign-Sign WAPA在非高斯噪聲條件下的NMSD收斂曲線。

圖6 非高斯噪聲下各算法的性能比較
由圖6可以看出,APA算法已經發散。所提Variable Sign-Sign WAPA和Sign-Sign WAPA算法的收斂速度較Sign WAPA和WAPA算法有極大改善,較Sign WAPA的穩態失調也改善了20dB左右。
圖5和圖6也同時驗證了所提出的Variable Sign-Sign WAPA在干擾噪聲為高斯噪聲和非高斯噪聲時相比于其他算法的優勢,包括穩態失調,收斂速度和抗脈沖干擾性能。因此,所提的新算法技術對異常值具有較強的魯棒性。
如圖7所示,為在干擾噪聲為非高斯噪聲下提出新算法Variable Sign-Sign WAPA與WAPA、Sign WAPA、Sign-Sign WAPA各算法的跟蹤性能仿真曲線。當迭代次數達到3000的時候,回聲信道W變為-W。如圖所示,提出的新算法Variable Sign-Sign WAPA和Sign-Sign WAPA算法在信道發生突變時,具有良好的跟蹤性能。

圖7 非高斯噪聲下各算法跟蹤性能
8 算法在回聲消除中的應用
在回聲消除的真實場景中,遠端輸入信號一般是語音信號,有必要保證這種情況下算法的魯棒性。將所提的Variable Sign-Sign WAPA算法應用到如圖8所示的自適應回聲消除系統中,與現有的APA、WAPA、Sign WAPA 及 Sign-Sign WAPA 算法進行比較。輸入信號采用真實語音信號,波形如圖9所示。其采樣頻率為8kHz,樣本長度為480000。以此比較在非高斯噪聲條件下各個算法的收斂性能。

圖8 自適應回聲消除系統

圖9 某真實語音信號波形
如圖8所示,X(n)是遠端信號,即輸入信號。v(n)是近端信號。表示回聲信道W的估計值。當遠端語音信號X(n)通過W產生回聲信號y(n),d(n)為麥克風獲取的信號,也是自適應濾波器的期望信號。當自適應濾波算法處于穩態時,自適應濾波器的輸出?(n)即為回聲信號估計值,將其從期望信號中減去即可實現回聲消除。
各算法的收斂性能在非高斯噪聲條件下的對比情況如圖10所示。一方面所提的Variable Sign-Sign WAPA和Sign-Sign WAPA算法均表現出了對強脈沖干擾的魯棒性;另一方面,在加入語音信號時,Variable Sign-Sign WAPA算法仍保持較快的收斂速度,而WAPA和Sign WAPA收斂變慢,穩態失調高,總體性能差。以此便可證明,所提新算法在語音信號狀態下具有優越的性能,適用于回聲消除的應用中。

圖10 非高斯噪聲條件下的收斂性能
9 結束語
通過基于Wilcoxon范數作為代價函數,提出了一種新的變步長Sign-Sign Wilcoxon仿射投影算法。在高斯噪聲干擾和非高斯噪聲干擾下將APA、WAPA、Sign WAPA、Sign-Sign WAPA 和 Variable Sign-Sign WAPA進行比較。仿真結果表明,無論輸入信號是有色信號還是語音信號,所提出的新算法比其他算法都具有較快的收斂性能和更低的穩態失調,并且在信道突變時,有著良好的跟蹤性能,在系統中包含強脈沖干擾時,也能表現出很強的魯棒性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06