BDS+QZSS雙系統組合PPP性能評估
2019-05-07 02:49:46張玉英譚榮建布金偉李國柱張東升
城市勘測 2019年2期
張玉英,譚榮建,布金偉,李國柱,張東升
(1.昆明理工大學國土資源工程學院,云南 昆明 650093; 2.云南海鉅地理信息技術有限公司,云南 昆明 650000)
1 引 言
北斗衛星導航系統(Beiou Satellite Navigation System,簡稱“BDS”)是我國正在實施的自主研發、 獨立運行的全球衛星導航系統,預計將在2020年左右具備覆蓋全球的導航定位能力,屆時將與GPS、 GLONASS和Galileo系統一同為全球用戶提供高精度、可靠的導航定位服務[1]。因而多系統組合導航定位也將是未來高精度定位的重要發展方向[2~5]。準天頂系統(Quasi-Zenith Satellite System,簡稱 “QZSS”)是由日本宇宙航空研究開發機構(Japan Aero-space Exploration Agency,簡稱 “JAXA”)研發和實施的區域性衛星導航及增強系統[6~8]。
在截止高度角較大情況下,以及城市、建筑物密集區、山區、樹林較多等區域,僅依靠單系統進行定位無法滿足導航定位精度需求。在這些情況之下,單系統可見衛星數較少,定位精度和定位性能較差,為了克服此類問題,日本已經投入建設QZSS衛星系統,以增強其他系統衛星的定位服務能力。近年來,很多國內外學者對QZSS系統與其他系統衛星組合定位方面開展了很多研究工作并且取得了很多不錯的研究成果[9~13],但是QZSS系統對其他系統增強服務的評估主要集中在GPS系統,對其他系統的增強服務開展得還較少且不夠具體。雖然目前QZSS/BDS組合定位的研究較少,但今后QZSS與其他系統的組合定位也將會成為一種必然趨勢,因此評估QZSS導航系統對BDS在我國定位性能的增強作用具有重要意義。鑒于此,本文利用MGEX跟蹤站的觀測數據分別從可見衛星數、DOP值、靜態PPP(Static PPP)和動態PPP(Kinematic PPP)幾個方面對BDS+QZSS雙系統組合PPP性能進行評估。
2 BDS+QZSS衛星導航系統星座結構
BDS衛星導航系統由35顆衛星構成,截至2012年底區域導航系統正式開通運行,共計發射衛星16顆,其中14顆組網并提供服務,包括5顆靜止軌道GEO衛星、5顆傾斜同步軌道IGSO衛星和4顆中地球軌道MEO衛星,是第一個三軌混合的導航星座。預計到2020年,服務范圍將覆蓋全球,為全球用戶提供更高精度的服務。目前,BDS在軌衛星數已經達到23顆,其中有21顆具有提供導航定位服務的能力。在時間系統方面,BDS衛星導航系統采用BDST,在坐標系統方面,采用CGCS2000坐標系[14]。BDS衛星系統向用戶播發4種信號,即:B1(1 575.420 MHz)、B2(1 191.795 MHz)、B3(1 268.520 MHz)、Bs(2 492.028 MHz),其中,Bs頻點信號僅在I2-S和M1-S衛星上播發。
日本(Japan)的QZSS星座基本遵循了和BDS衛星導航系統類似的設計思路,QZSS衛星導航系統由分布在3個高傾斜橢圓軌道HEO上的3顆衛星組成[6]。目前,可觀測到2顆準天頂衛星(QZS),QZSS導航衛星的星下點軌跡呈大橢圓非對稱“8”字形,在靠近日本附近的橢圓較大,在靠近澳大利亞附近的橢圓較小,在任何時間下,日本境內至少能接收1顆QZS衛星,QZS衛星能最大限度地減弱由于建筑物高大密集、樹林、峽谷、山地等對導航信號的遮擋。
QZSS衛星向用戶播發6種導航信號,即:L1C、L1-C/A、L1-SAIF、L2C、L5和LEX。L1C、L1-C/A、L1-SAIF(中心頻率和頻率寬帶分別都為 1 574.42 MHz和24±12 MHz),L2C(中心頻率和頻率寬帶分別為 1 227.60 MHz和24±12 MHz),L5(中心頻率和頻率寬帶分別為 1 176.45 MHz和24.9±12.45 MHz),LEX(中心頻率和頻率寬帶分別為 1 278.75 MHz和39.0±19.5 MHz)。L1C、L1-C/A、L1-SAIF、L2C、L5信號在播發頻點、擴頻速率、調制和信號格式與GPS完全兼容,L1C、L5與Galileo系統播發的E1、E5a兼容。QZSS導航衛星改善了日本區域以及其他亞太地區定位的可用性和可靠性[10,15,16]。QZSS導航衛星共有2個發射信號的天線,LS-ANT天線在L1-SAIF頻段播發dm級的廣域差分增強信號,類似于目前SBAS的服務。L-ANT天線在Galileo E6頻段上播發LEX信號用于提供高精度導航服務[12]。
在時間系統方面,QZSS導航衛星系統采用QZSST,時間系統與GPS一致,受控于GPST。坐標系統方面,QZSS導航衛星系統采用JGS,JGS坐標系統與GPS衛星系統采用的WGS-84之間的差異小于 2 cm,差異較小,對于一般的導航定位而言,這種差異可忽略不計。
3 定位性能評估
3.1 BDS+QZSS衛星可見性和DOP值分析
為了對BDS+QZSS衛星的可見性和DOP值進行評估和分析,試驗采用2017年9月1日的3個測站(CUT0、JFNG和NNOR測站)的觀測數據和廣播星歷數據,分別分析了3個測站在全天內BDS、BDS+QZSS導航衛星的Skyplot圖(如圖1所示)和衛星可見性情況(如圖2所示)。圖1(a-c)分別為測站CUT0、JFNG和NNOR在全天內BDS的Skyplot圖,圖1(d-f)分別為測站CUT0、JFNG和NNOR在全天內BDS+QZSS的Skyplot圖。測站CUT0位于南半球上,其BDS可見衛星數為14顆,QZSS可見衛星數為2顆,呈不對稱 “8”字形狀。測站JFNG位于北半球上,BDS可見衛星數為14顆,QZSS可見衛星數為2顆。測站NNOR位于南半球上,BDS可見衛星數為16顆(C01-C14,C31-C32),QZSS可見衛星數為2顆。3個測站均能觀測到BDS衛星和QZSS衛星,在BDS+QZSS衛星均可見情況下便能實現增強覆蓋,組合定位性能也將比單一系統衛星得到提升。

圖1各個測站觀測時段內BDS+QZSS衛星的Skyplot圖

圖2 各個測站觀測時間內可見衛星情況
從圖2(a)分析可知,在CUT0測站,1d內對于BDS衛星,C02、C03、C04、C05衛星全天均可見,C01、C06、C07、C08、C09、C11、C12、C13、C14衛星1d內部分時間可見。對于QZSS衛星,J01衛星全天可見,J02衛星1d內大約3h不可見;在JFNG測站,1d內對于BDS衛星,C02、C03、C04、C05衛星全天均可見,C01、C06、C07、C08、C09、C11、C12、C13、C14衛星1d內部分時間可見。對于QZSS衛星,J01衛星1d內大約4h不可見,J02衛星1d內大約5h不可見;在NNOR測站,1d內對于BDS衛星,C02、C03、C04、C05衛星全天均可見,C01、C06、C07、C08、C09、C11、C12、C13、C14、C31、C32衛星1d內部分時間可見。對于QZSS衛星,J01衛星和J02衛星全天均可見。
圖3所示為CUT0測站的可見衛星數和DOP值時間序列,圖中紫色、紅色、藍色、綠色和黑色分別表示可見衛星數、GDOP、PDOP、HDOP和VDOP的時間序列(截止高度角為30°)。從圖3分析可知,隨著高度角的增加,DOP值逐漸增大,可見衛星數逐漸較少,BDS+QZSS組合系統無論在何種截止高度角情形下,DOP值都比BDS單系統小且較穩定,可見衛星數則比BDS單系統多。在截止高度角為30°情況下,CUT0測站BDS+QZSS組合系統的DOP值波動比BDS單系統波動小,DOP均能保持在10以上,而BDS單系統達到12。

圖3CUT0測站的可見衛星數、DOP值時間序列(截止高度角為30°)
3.2 PPP定位精度分析
(1)靜態PPP分析
為了對BDS+QZSS導航衛星系統的定位性能進行評估和分析,選取了MGEX跟蹤站的數據進行靜態精密單點定位(Static PPP)和動態精密單點定位(Kinematic PPP)試驗,數據采樣率為30s。圖4為JFNG測站的靜態PPP時間序列(高度角為15°),表1為NNOR測站不同截止高度角下dE、dN和dU的RMS值及改善率。
從圖4可以看出,E方向上,BDS+QZSS組合系統定位收斂速度快于BDS單系統,收斂以后,BDS+QZSS與BDS單系統定位誤差差異不大,N方向上,BDS+QZSS組合系統較BDS單系統改善不明顯,U方向上,BDS+QZSS定位收斂速度明顯比BDS單系統快,定位穩定性也優于BDS單系統,U方向上改善效果比E和N方向顯著。
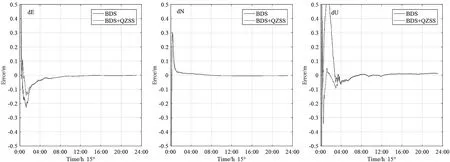

圖4 JFNG測站靜態PPP時間序列 NNOR測站不同截止高度角下dE、dN和dU的RMS值及改善率(Static PPP) 表1
從表1可以看出,E方向上,BDS+QZSS組合系統靜態PPP結果較BDS單系統有一定改善,高度角小于30°情況下,改善率達到5%,當高度角為40°時,改善效果較為明顯,改善率為11%;N方向上,當高度角小于30°時,改善率達到19%,當高度角為40°時,改善效果比E方向明顯,改善率為23%;U方向上,當高度角為7°和15°時,BDS+QZSS組合系統靜態PPP結果改善情況較BDS單系統差,高度角為30°時,較BDS單系統改善好,改善率為9%,高度角為40°時,改善率達到17%。綜上分析,BDS+QZSS組合系統靜態PPP結果N方向改善效果最好,U方向次之。然而在高度角較大時(40°),U方向上,BDS+QZSS組合系統比BDS單系統在低高度角情形下改善較為明顯。
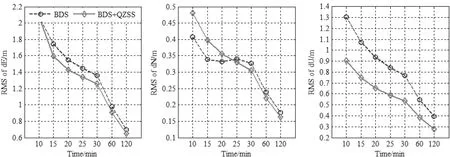
圖5NNOR測站不同時段長度解的靜態PPP定位精度及收斂速度
圖5給出了NNOR測站不同時段長度解的靜態PPP定位精度及收斂速度,從圖中可知,BDS+QZSS組合系統靜態PPP的定位精度高于BDS單系統且收斂速度快于BDS單系統。E方向上,RMS值若要獲得 1 m的結果,BDS+QZSS組合系統需要 50 min,而BDS單系統需要 60 min。N方向上,觀測 120 min時段,BDS+QZSS組合系統和BDS單系統的RMS值分別為 0.17 m和 0.18 m。U方向上,RMS值若要得到 0.4 m的結果,BDS+QZSS組合系統需要 60 min,而BDS單系統則需要 120 min。
(2)動態PPP分析
為了分析BDS+QZSS衛星導航系統動態精密單點定位的性能,圖6給出了NNOR測站動態PPP、可見衛星數和PDOP值時間序列(截止高度角分別為15°和40°),表2給出了NNOR測站不同截止高度角下(分別為7°、15°、30°和40°)BDS+QZSS組合系統與BDS單系統定位結果的改善率統計。從圖6中可以看出,從定位誤差方面看,當截止高度角為15°時,NNOR測站E、N和U三個方向的BDS+QZSS組合動態PPP定位誤差與BDS單系統差異不大,當截止高度角為40°時,E、N和U三個方向BDS單系統全天內的可用歷元下降,一天僅有50%左右可用歷元,而BDS+QZSS組合可用歷元較多,此時兩種模式的定位誤差都較大,各個方向的離散程度都較差,BDS+QZSS組合對定位精度的改善有限,但BDS+QZSS組合與BDS單系統相比仍能有一定的改善效果。從可見衛星數和PDOP方面看,當截止高度角為15°時,BDS+QZSS組合與BDS單系統的可見衛星數全天均能保持在6顆以上,PDOP值均小于6且波動穩定。當截止高度角為40°時,BDS+QZSS組合全天可見衛星數在5顆左右,BDS單系統在4顆左右,此時BDS單系統的PDOP值比BDS+QZSS組合較大,波動比BDS+QZSS組合大。這說明BDS+QZSS組合能有效改善衛星分布的空間幾何構型。
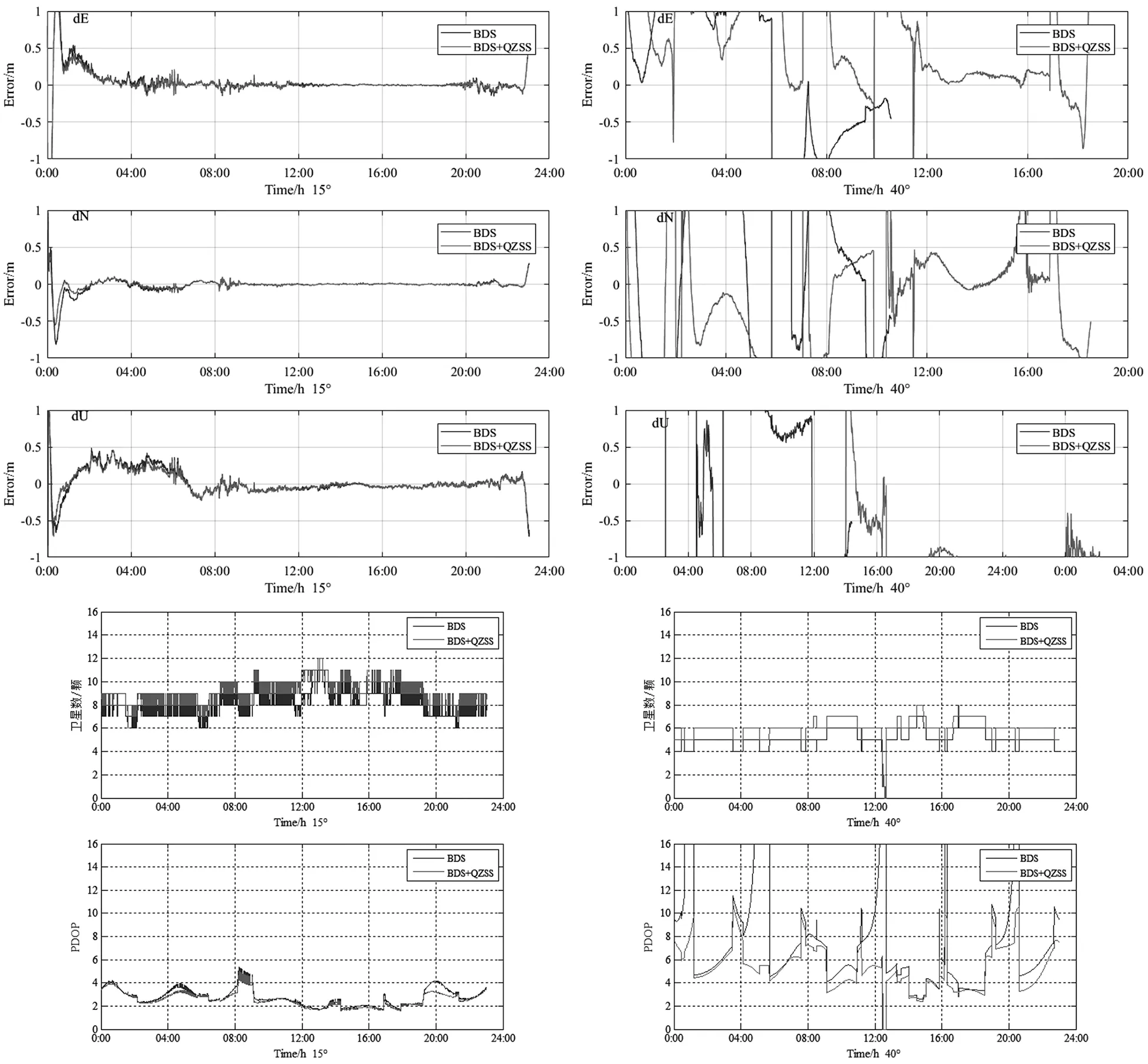

圖6 NNOR測站動態PPP、可見衛星數和PDOP值時間序列(截止高度角分別為15°和40°) NNOR測站不同截止高度角下dE、dN和dU的RMS值及改善率(Kinematic PPP) 表2
從表2分析得出,在高度角為40°時,E、N和U方向上,BDS+QZSS組合系統改善效果較BDS單系統明顯。當高度角為7°時,E、N和U方向改善率分別為0.5%、3%和9%。當高度角為15°時,E、N和U方向改善率分別為-7%、11%和11%,BDS+QZSS組合系統E方向上改善比BDS單系統差。當高度角為30°時,E、N和U方向改善率分別為19%、9%和5%。
圖7給出了不同測站BDS和BDS+QZSS模式動態PPP解算的dE、dN和dU的RMS值統計結果。從圖中分析可知,JFNG、NNOR和CUT0 3個測站的E、N和U方向,無論何種高度角情況下,BDS+QZSS組合系統的RMS值均小于BDS單系統。綜合對比來看,3個測站截止高度角為40°情況下,BDS+QZSS組合系統的定位精度較BDS單系統改善顯著。由此可見,QZSS衛星的加入,能夠增強BDS衛星的定位精度、可靠性和穩定性。

圖7不同測站BDS和BDS+QZSS模式dE、dN和dU的RMS對比圖(KinematicPPP)
4 結 論
本文利用MGEX跟蹤站的觀測數據分別從可見衛星數、DOP值、靜態PPP和動態PPP幾個方面對BDS+QZSS雙系統組合PPP性能進行評估,得到以下幾點結論:
(1)BDS+QZSS組合系統定位比BDS單系統定位具有較優的空間幾何構型分布,無論在何種高度角情況下,可見衛星數都多于BDS單系統,DOP值小于BDS單系統。
(2)靜態PPP方面,E、N和U方向上,BDS+QZSS定位收斂速度比BDS單系統快,定位穩定性也優于BDS單系統,U方向上改善效果比E和N方向顯著。在高度角較大時(40°),U方向上改善率達到17%以上,BDS+QZSS組合系統比BDS單系統在低高度角情形下改善較為明顯。對于NNOR測站而言,E方向上,RMS值若要獲得 1 m的結果,BDS+QZSS組合系統需要 50 min,而BDS單系統需要 60 min。N方向上,觀測 120 min時段,BDS+QZSS組合系統和BDS單系統的RMS值分別為 0.17 m和 0.18 m。U方向上,RMS值若要得到 0.4 m的結果,BDS+QZSS組合系統需要 60 min,而BDS單系統則需要 120 min。
(3)動態PPP方面,當截止高度角為40°時,E、N和U三個方向BDS單系統全天內的可用歷元下降,一天僅有50%左右可用歷元,而BDS+QZSS組合可用歷元較多,此時兩種模式的定位誤差都較大,各個方向的離散程度都較差,BDS+QZSS組合對定位精度的改善有限,但BDS+QZSS組合與BDS單系統相比仍能有一定的改善效果。可見,QZSS衛星的加入,能夠增強BDS衛星的定位精度、可靠性和穩定性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
