BDS/GLONASS/GALILEO多模組合單點定位性能比較分析
2019-05-07 03:16:08李湘梅陸兆峰左小清布金偉常軍
城市勘測 2019年2期
關鍵詞:系統
李湘梅,陸兆峰,左小清,布金偉,常軍
(1.昆明理工大學 國土資源工程學院,云南 昆明 650093; 2.浙江省測繪大隊,浙江 杭州 310030;3.國家測繪地理信息局第一大地測量隊,陜西 西安 710054)
1 引 言
隨著導航衛星的發展,近年來BDS、GLONASS、GALILEO導航衛星也在迅速發展,并且在很多領域起到重要作用,但是單系統定位模式有時無法保障所需定位精度,甚至難以滿足導航定位的要求。多星座組合使得衛星在空中的幾何分布較單系統更好,定位精度更高,而且導航定位的穩定性和可靠性也得到一定提高[1,2];除此之外,多星座組合提高了可見衛星數,可見衛星數目的增加,可以提高山區、城市等區域的定位能力[3]。因此,多星座組合定位逐漸成為未來GNSS導航定位的主要發展方向。眾多學者對多系統組合單點定位進行了相關的研究工作:賈雪等人針對不同截止高度角對GPS/BDS/GALILEO多系統融合偽距單點定位性能進行分析,結果表明,GPS/BDS/GALILEO組合系統定位精度比單系統高,而且具有更加穩定的定位結果[4]。吳玲等人對GPS/GLONASS/GALILEO多星座組合導航系統研究分析,發現多星座組合系統大大增加了可見衛星數,減小了PDOP值,導航定位的精度得到提高,定位性能以及可靠性良好[2]。布金偉等人對Beidou/GPS/GLONASS多系統衛星的定位數據質量進行了分析,并發現隨著截止高度角的增加,組合系統PDOP值相比單系統較小且較穩定,在截止高度角較大的情況下(40°),相比單系統而言,組合系統獲得了比較好的定位精度[5,6]。
綜上所述,目前很多學者對多系統融合進行單點定位的研究主要以GPS/BDS/GLONASS、GPS/BDS/GALILEO、GPS/GLONASS/GALILEO為主,對BDS/GLONASS/GALILEO的研究目前還較少開展相關工作。基于此,本文在衛星截止高度角分別為15°、20°、25°、30°、40°、45°的情況下,對BDS、GLONASS、GALILEO、BDS/GLONASS、BDS/GALILEO、GLONASS/GALILEO、BDS/GLONASS/GALILEO組合的7種模式的偽距單點定位進行解算。
2 BDS+GLONASS+GALILEO組合偽距單點定位數學模型
2.1 時間基準統一
BDS的時間系統采用BDT,GLONASS的時間系統采用GLONASST,GALILEO的時間系統采用GST時,對BDS、GLONASS和GALILEO的時間基準統一,應當尋求一個中間變量,將三個不同的時間系統轉化到含有相同變量的關系式中,BDS、GLONASS和GALILEO的時間基準都與UTC有一定的聯系,所以可選擇UTC為中間變量對其時間系統進行統一,具體轉換方法參考文獻[7]和文獻[8]。
2.2 坐標基準統一
BDS的坐標系統采用CGCS2000,GLONASS的坐標基準采用PZ-90,GALILEO的坐標基準采用GTRF坐標系,在進行坐標基準轉換時,將其統一至CGCS2000坐標系下。近年來,多衛星系統融合發展使得不同的坐標框架越來越兼容[8],CGCS2000和GTRF坐標系之間存在cm級的偏差,對于偽距單點定位m級定位精度而言,可忽略兩者之間的差異[9]。而PZ-90和CGCS2000之間的差異可達數米甚至是數十米[8],因此兩者差異不容忽視,文中可采用七參數布爾沙模型實現轉換[7,10]。
2.3 BDS+GLONASS+GALILEO組合單點定位數學模型
BDS、GLONASS、GALILEO偽距單點定位的觀測方程分別為[11]:

(1)
(2)
(3)
將觀測方程(1)、(2)、(3)在測站近似坐標(X0、Y0、Z0)處用泰勒級數展開,得誤差方程:
V=AδX-L
(4)
即:
(5)

δX=(ATPA)-1ATPL
(6)
在進行偽距單點定位時,單系統的未知參數包括1個接收機鐘差以及3個坐標分量,雙系統的未知參數包括2個接收機鐘差以及3個坐標分量,三系統的未知參數包括3個接收機鐘差以及3個坐標分量。所以,至少需要同時觀測到4顆衛星才能進行單系統偽距單點定位,同理可知,至少需要5顆衛星才能進行雙系統偽距單點定位,三系統偽距單點定位則需要至少6顆衛星[12]。
3 試驗分析
本實驗采用MGEX跟蹤站部分測站的數據,數據觀測時間為2016年02月01日0時0分0秒~2016年02月01日23時59分30秒,數據采樣間隔為 30 s。分別對BDS(C)、GLONASS(R)、GALILEO(E)、BDS/GLONASS(CR)、BDS/GALILEO(CE)、GLONASS/GALILEO(RE)和BDS/GLONASS/GALILEO(CRE)組合模式在不同衛星截止高度角(分別為15°、20°、25°、30°、40°和45°)情況下的可見衛星數、定位精度、定位穩定性和收斂性進行對比分析。
3.1 可見衛星數分析
圖1為不同截止高度角(高度角分別為:15°、20°、25°、30°、40°和45°)下,C、R、E、CR、CE、RE、CRE七種模式衛星可見數的情況。
由圖1可知,隨著衛星截止高度角的增加,可見衛星數減少。對單系統而言,BDS的可見衛星數較多,在不同的截止高度角下,其可見衛星數達4顆~11顆,可滿足定位要求;其次是GLONASS,GLONASS在截止高度角45°時無法進行定位;GALILEO的可見衛星數較少,當截止高度角為40°、45°時,GALILEO無法進行定位,這主要是因為GALILEO目前還處于建設階段,可以進行觀測定位的衛星數較少。
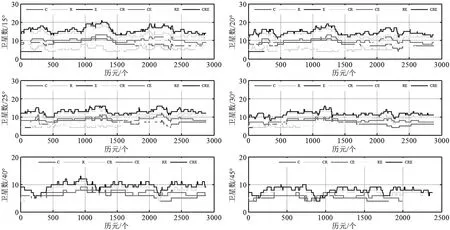
圖1不同截止高度角不同組合系統衛星可見數情況
對多系統而言,多系統融合的可見衛星數較單系統有了明顯的改善,其中,CRE組合的可見衛星數最多,其次是CR、CE和RE組合。在截止高度角為15°時,CRE組合可見衛星數達13~20顆,較BDS、GLONASS和GALILEO單系統有了很大提高;在截止高度角45°時,CRE組合可見衛星數目為5~9顆,大多數時刻滿足定位要求,但在部分時刻可見衛星數僅有5顆,無法進行三系統偽距單點定位。CR組合可見衛星數比CRE組合少,但在雙系統組合中其可見衛星數最多,在6種情形的截止高度角下可見衛星數均大于5顆,可進行雙系統偽距單點定位。CE組合在截止衛星高度角為45°時,部分時刻可見衛星數為4顆,無法進行雙系統偽距單點定位,其他高度角下(15°、20°、25°、30°和40°)可見衛星數均滿足定位要求。RE組合可見衛星數較其他多系統組合較少,與BDS可見衛星數相近,但是與GLONASS、GALILEO單系統相比,可見衛星數目仍然有所增加。由此可知,在多系統融合中,BDS對于增加可見衛星數目做的貢獻較大。隨著截止高度角的增加,可見衛星數目呈下降趨勢,但是在不同截止衛星高度角下,大多數的組合系統依然解決了單系統因可見衛星數不足無法進行單點定位的問題。BDS/GLONASS/GALILEO組合定位在6個不同高度角下的可見衛星數都是最優的;當可見衛星數較多時,衛星的空間幾何分布越好。
3.2 定位性能分析
(1)不同截止高度角定位精度分析
圖2給出了GMSD測站在截止高度角為15°和30°兩種情況下7種模式(C、R、E、CR、CE、RE、CRE)在X方向、Y方向、Z方向的三維坐標偏差變化情況。
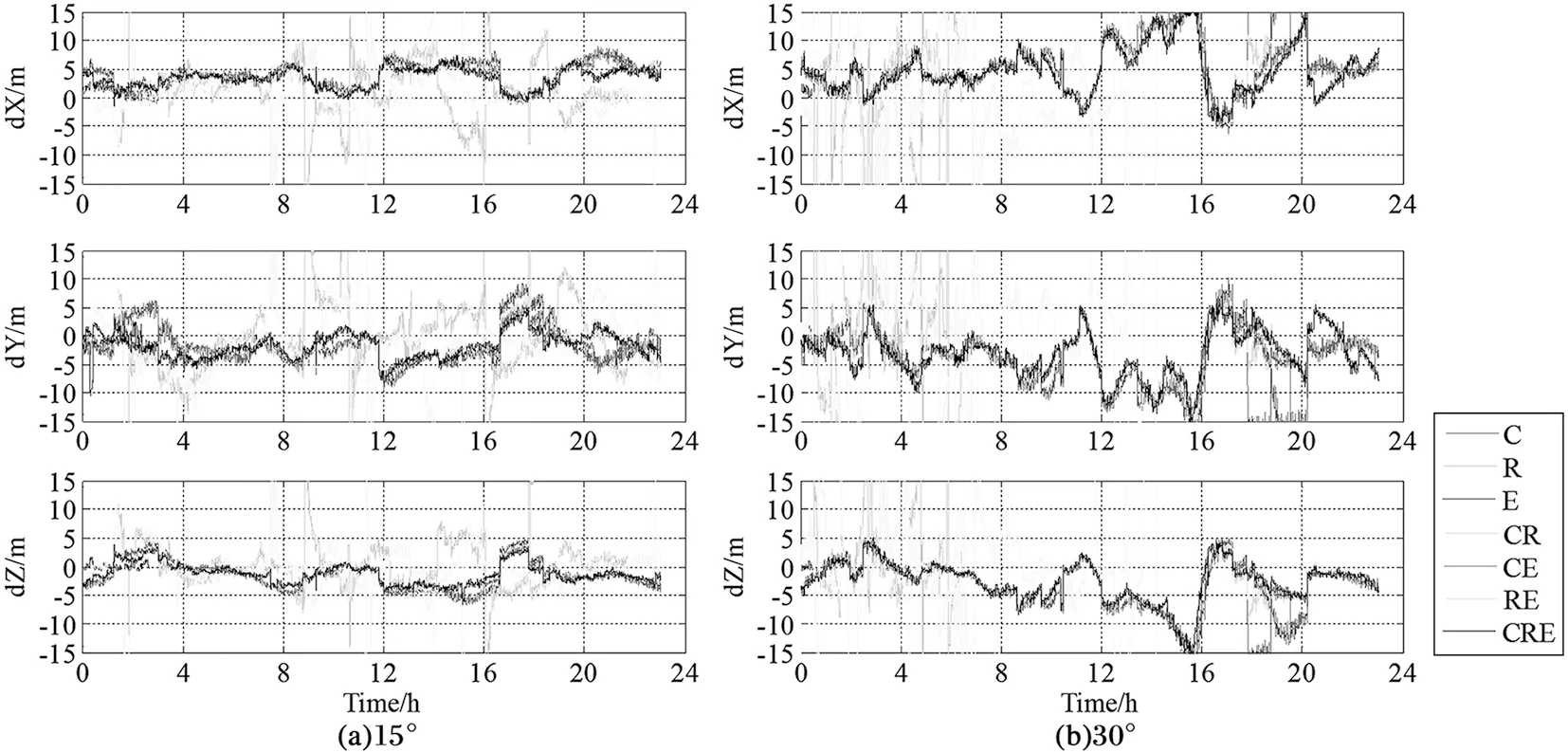
圖2不同截止高度角下X、Y、Z三維坐標偏差
從圖2可知,截止高度角15°時X、Y、Z方向上的穩定性比30°好,三維坐標偏差也較小。當截止高度角為15°時,R和RE組合在X、Y、Z方向上的坐標偏差超過 15 m,穩定性較差,而其他模式穩定性較好;當截止高度角為30°時,各種組合模式穩定性比15°時差,波動較大。相比之下,CRE組合模式X、Y、Z方向上定位精度都比單系統好,其穩定性更高。綜合以上分析,無論在衛星截止高度角為15°或30°的情況下,對單系統而言,BDS的歷元可用率及穩定性較高,GLONASS的穩定性較差,GALILEO的歷元可用率較少;對多系統而言,BDS/GLONASS/GALILEO組合模式的穩定性最高,其次是BDS/GLONASS組合和BDS/GALILEO組合,GLONASS/GALILEO組合模式的穩定性較差,這主要是因為在組合模式下BDS和GLONASS的空間衛星幾何分布較好。而在截止高度角較大的情況下,相比單系統,BDS/GLONASS/GALILEO組合對定位結果改善效果更為明顯。
(2)RMS值統計分析
為分析多系統組合進行單點定位的收斂時間,圖3對GMSD測站在 10 min、15min、30 min、1 h、2 h、4 h、6 h和 12 h 8個時段的RMS值進行了統計,由于采集數據的 12 h內GALILEO無法進行定位,所以未對其RMS值進行統計(圖中實心點、星號、多邊形、圓圈、下三角、矩形分別代表C、R、CE、CR、RE、CRE時段解RMS值,從左到右三幅子圖分別為X、Y、Z三個方向)。
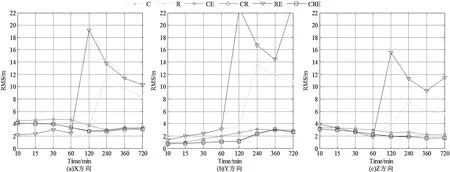
圖3不同時段單點定位精度及收斂速度
從圖3可看出,對單系統而言,BDS的定位精度和收斂速度都要優于GLONASS。對多系統而言,CE、CR、CRE定位模式的RMS值較小,且較穩定;其中CRE組合模式可以較快地達到較高精度,在 10 min時X、Y和Z方向RMS值達到 4.09 m、0.71 m和 3.12 m。R和RE組合的精度較差,而且波動比較大。
在X方向上,C、CE、CR、CRE定位模式的RMS值較小,在 2 m~6 m之間;在 60 min之前,R和RE的RMS值相比其他模式最小,60 min之后呈急劇上升趨勢,RE在 120 min時RMS達最大值為 19.19 m,R在 240 min時RMS達最大值為 11.91 m,之后開始減小。在Y方向上,CRE的RMS值最小,為 0.71 m~3.02 m;R和RE的RMS值最大,且波動較大。在Z方向上,CR和CRE的RMS值最小,且隨著時間的增加呈下降趨勢,其RMS最小值為1.61左右;R的RMS值最大出現在 240 min,為 7.41 m;在 120 min時刻,RE的RMS最大,其值為 15.52 m。
為分析多系統組合相比單系統進行單點定位的改善情況,表1給出了在截止高度角為15°和30°下GMSD和ANMG兩個測站的RMS值統計結果(#表示無法進行定位)。
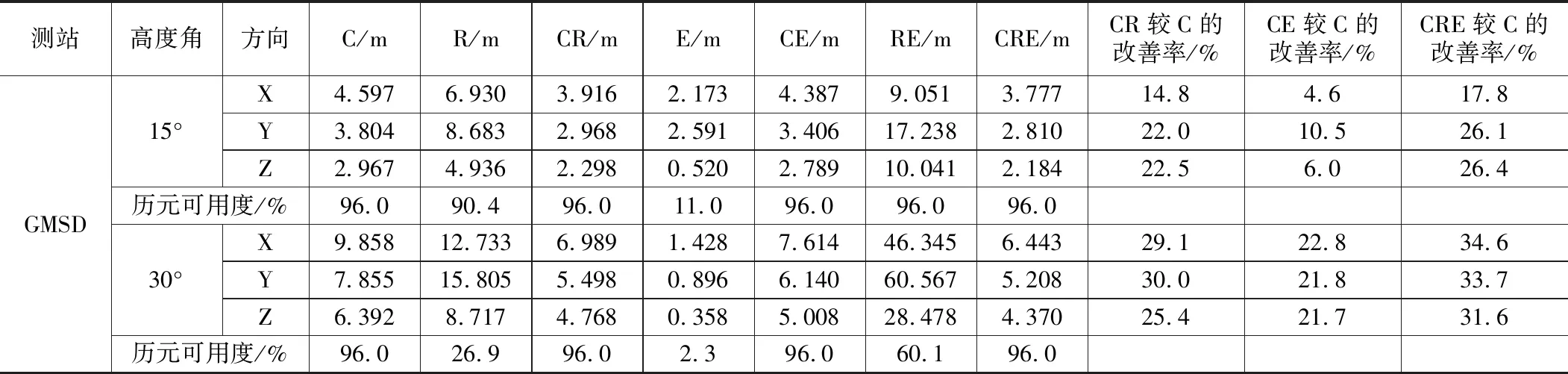
RMS值統計結果 表1

續表1
從表1可知,GMSD測站截止高度角為15°時,C、CR、CE、RE、CRE的歷元可用度都為96.0%;R的歷元可用度為90.4%,E的歷元可用度為11.0%。單系統模式中C的RMS值較小且歷元可用度較高,組合系統較單系統都有提高,其中CRE組合定位模式改善率最大,在X、Y、Z方向上,CRE組合模式較C的改善率分別達17.8%、26.1%和26.4%。截止高度角為30°時,C、CR、CE、CRE的歷元可用度都為96.0%,E的歷元可用度最低,僅2.3%,這主要是因為目前GALILEO只有較少的衛星可以進行觀測。組合系統較單系統的改善率比截止高度角15°時高,CRE組合模式的改善率最大,在X、Y、Z方向上,CRE組合模式較C的改善率分別達34.6%、33.7%和31.6%。
ANMG測站截止高度角為15°時,C、CR、CE、RE、CRE的歷元可用度為94.8%,E的歷元可用度最低,僅28.3%;在單系統模式中,C的RMS值最小,組合系統較單系統有所提高,其中CRE組合定位模式改善率最大,在X、Y、Z方向,CRE組合模式較C的改善率分別達24.5%、13.0%和26.4%。當截止高度角為30°時,C、CR、CE、CRE的歷元可用度為94.8%,此時E無法進行定位。而CRE組合定位模式改善率最大,在X、Y、Z方向,CRE組合模式較C的改善率分別達5.6%、10.8%和21.0%。
所選取的GMSD測站最大歷元可用度為96.0%,最小歷元可用度為E的2.3%;ANMG測站最大歷元可用度為94.8%,最小歷元可用度為R的18.9%,ANMG測站截止高度角為30°時E無法進行定位。當截止高度角為15°時,X方向上,ANMG測站CRE較C的改善率比GMSD測站大,達24.5%,GMSD測站CE較C的改善率僅4.6%;在Y方向,GMSD測站各組合模式較C的改善率均比ANMG測站大;在Z方向,GMSD測站和ANMG測站中,CRE較C的改善率均為26.4%,GMSD測站中CE較C的改善率為6.0%。當截止高度角為30°時,在X、Y、Z方向上GMSD測站各組合模式較C的改善率均比ANMG測站多。在X方向上,GMSD測站各組合模式的改善率均在20.0%以上,CRE較C的改善率達34.6%;而ANMG測站各組合模式較C的改善率較低,均小于6.0%;在Y方向上,GMSD測站CRE較C的改善率達33.7%;在Z方向上,GMSD測站CRE較C的改善率達31.6%。
綜合以上分析,GMSD測站最大歷元可用度比ANMG測站大,而最小歷元可用度比ANMG測站小。GMSD測站各組合模式在截止高度角30°的情況下,CRE較C的改善率在X、Y、Z方向均大于30.0%,其改善程度較好。總體來說,在截止高度角30°的情況下,GMSD測站在X、Y、Z方向上,各組合模式較C的改善率比ANMG測站好;在截止高度角15°的情況下,GMSD測站和ANMG測站在X、Y、Z方向上,各組合模式較C的改善率均有所提高,CE較C的改善率在組合模式中相對較低。
4 結 論
在6種不同的截止高度角(15°、20°、25°、30°、40°和45°)下,對BDS、GLONASS、GALILEO、BDS/GLONAS、BDS/GALILEO、GLONASS/GALILEO和BDS/GLONASS/GALILEO七種模式的偽距單點定位進行解算,得出以下結論:
(1)BDS、GLONASS和GALILEO單系統中BDS的可見衛星數較多,可見衛星數目隨著衛星截止高度角的增加而減少;BDS/GLONASS/GALILEO組合系統的衛星可見數較單系統有明顯增加。衛星可見數增多可以提高空間幾何構型強度,使得定位結果更可靠,這對于有建筑物、樹木遮擋的區域十分重要。
(2)在截止高度角15°和30°的情況下,對BDS、GLONASS、GALILEO、BDS/GLONASS、BDS/GALILEO、GLONASS/GALILEO、BDS/GLONASS/GALILEO組合的X、Y、Z三維坐標分量偏差進行分析,結果發現,在截止高度角為15°的情況下,X、Y、Z三維坐標偏差比30°情況下小,且定位結果更穩定;BDS/GLONASS/GALILEO組合系統穩定性最高,且其三維坐標偏差較其他組合下的單點定位方式有明顯的減少。
(3)在截止高度角為15°的情況下,對GMSD測站不同時間段的RMS值分析得出,單系統中BDS的定位精度以及收斂性最佳,這與BDS在軌衛星數較多有關,采集數據的12h內GALILEO無法進行定位;GLONASS和GLONASS/GALILEO的RMS值最大,且波動較大,其余各組合系統收斂性較好。
(4)在截止衛星高度角15°和30°的情況下,對GMSD和ANMG測站的RMS值進行分析,隨著截止衛星高度角的增加,歷元可用度降低,其中GLONASS、GALILEO、GLONASS/GALILEO組合歷元可用度受高度角影響較大;當截止衛星高度角為30°時,ANMG測站上GALILEO無法進行定位,組合系統較單系統定位精度有明顯改善,其中BDS/GLONASS/GALILEO較BDS的改善率最大;GMSD測站截止高度角為30°時,X、Y、Z方向BDS/GLONASS/GALILEO較BDS的改善率均達30%以上。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
