一種彈載三軸加速度計現場快速標定及補償方法
2019-05-05 08:48:24馮凱強魏曉凱
兵器裝備工程學報 2019年4期
關鍵詞:測量
馮凱強,李 杰,魏曉凱
(中北大學 儀器科學與動態測試教育部重點實驗室, 太原 030051)
在慣性導航系統中,三軸加速度計性能的好壞直接影響到慣導測試系統的速度、姿態、位置解算精度,因此,對加速度計的測試標定已成為慣性測量組合使用過程中的重要環節[1]。對于三軸加速度計而言,通常由3個兩兩相互正交的加速度計組成,其測量精度與傳感器的零偏、刻度系數以及敏感軸之間的不正交安裝誤差相關[2]。在應用過程中,需對傳感器輸出進行標定補償以提高系統的測試精度。傳統三軸加速度計的標定方法需要借助光學分度頭或三軸轉臺等高精度測試設備來獲得準確標定參數。大量試驗表明,慣性器件自身性能參數會隨時間的推移與應用環境等方面的變化而發生變化[3]。最為顯著的就是傳感器的零位漂移,與初始標定時間相隔越長,傳感器的零漂越明顯;若在后期應用過程中沿用原有的標定結果,則會產生較大的解算誤差。實驗表明,加速度計的零偏對導航計算結果的誤差影響按時間的二次方增長。因此,彈載慣性測量組合在靶場實驗環境中傳感器自身性能參數與實驗室環境中轉臺標定參數會有很大不同,實彈飛行測試中,慣性測量單元中傳感器輸出參數誤差會產生較大的解算誤差,影響慣性測量組合的測試精度。由于火箭彈、炮彈等常規武器飛行時間短,因此與彈體固聯的慣性測量單元在較短的工作時間內需要有準確的參數輸出,以提高導航計算機的解算精度,在靶場實驗環境中,不可能實時利用轉臺等精密設備對安裝于彈體中的慣性測量組合進行在線標定,而通過濾波算法實現的系統級標定方法因其可觀測性分析復雜,計算量大也無法達到有效應用。鑒于此,本研究提出了一種三軸加速度計在線快速標定方法。該方法無需依賴轉臺等精密儀器,根據橢球擬合算法實現三軸加計的參數標定,并結合加速度計輸出特點給出了具體的標定位置編排,完成了相應的誤差補償。
1 三軸加速度計誤差分析
針對單軸加速度計,其測量誤差主要由零偏、靈敏度誤差和隨機漂移誤差組成。加速度計的隨機漂移誤差通常由偏置誤差與白噪聲組成,由于標定時間短,加速度計等效漂移往往經過后期濾波處理獲得,在標定時往往忽略該項。因此,各軸加速度計的測量模型通常表示為
Uai=Kiai+Uai0
(1)
其中:Uai為i軸加計輸出電壓值;Ki為i軸加速度計實際靈敏度;ai為i軸加速度真實值;Uai0為i軸加速度計的零位偏差。在彈載微慣性測量組合中,三軸加速度計通常由3個兩兩相互正交的加速度計組成,用來敏感加速度矢量在坐標系下的投影[4]。理想狀況下,可得到三軸加速度計的測量模型為
(2)
但是在制造過程中,由于安裝誤差的存在,無法保證三個傳感器的測量軸兩兩完全正交[5],其不正交示意圖如圖1。

圖1 不正交示意圖
假設OX0Y0Z0為理想三軸正交坐標系;OXYZ為實際加速度計敏感軸系;其中,Z軸與Z0軸重合,X軸在X0OZ0內與X0的夾角為α;Y軸在X0OY0內與Y0的夾角為β;Y軸與X0OY0面的夾角為γ。建立三軸加速度計的不正交誤差模型如下
(3)
綜上所述,三軸加速度計誤差主要有加速度計零偏、靈敏度誤差和不正交誤差,由此建立三軸加速度計的測量模型為:
Ua=Ka+Ua0
(4)

2 三軸加速度計在線標定模型
由于同一地點的重力加速度為一個常值,理想情況下,靜止放置的三軸加速度計在不同姿態下測得的加速度分量在三維空間中可構成一個中心在原點半徑為當地重力加速度的標準球體[5]。但由于三軸加速度計各項誤差的存在,使得形成的球體發生偏離,變為中心偏離原點的橢球。即:
aTa=[K-1(Ua-Ua0)]T[K-1(Ua-Ua0)]=g2
(5)
由上式變換成橢球曲面的二次型方程為:
(6)
三軸加速度計在線標定模型的實質就是通過測定不同姿態下三軸加速度分量擬合橢球的中心坐標與形狀參數來獲取加速度計的各項誤差參數[6]。橢球曲面的一般方程為:
F(ξ,Z)=ξTZ=0
(7)
式中:橢球曲面參數ξ=[a,b,c,d,e,f,p,q,r,g];設Z=[x2,y,z,2xy,2xz,2yz,2x,2y,2z,1]T為采集數據運算組合向量;F(ξ,Z)為采集數據(x,y,z)到橢球曲面的代數距離。
在進行二次曲面擬合時,采用帶約束的最小二乘法的橢球擬合一般選擇測量數據(x,y,z)到二次曲面代數距離的平方和最小為判斷準則,為了確保最終擬合的二次曲面為一橢球體,引入約束條件:
(8)
則得到擬合后的最佳橢球曲面方程整理為矢量形式為
(X-X0)TA(X-X0)=1
(9)
通過對比式(6)與式(9)可以得到
KKT=A-1/g2
(10)
Ua0=X0
(11)
根據式(4)可以計算得到各標定參數的估計值為
(12)
結合上述公式,利用擬合的得到的橢球參數即可獲得三軸加速度計的零偏和誤差系數矩陣,完成加速度計的標定。
3 在線標定方案編排與誤差補償
基于橢球約束的最小二乘法擬合原理的實質是找到一組最佳橢球參數,使得測量數據到橢球曲面的距離達到最小[7-8]。對用于擬合的測量數據來講,要求該數據盡可能地覆蓋橢球曲面的絕大部分球面,并且數據正確反映各測量軸的重力分量[9-12]。標定過程中通常在三維空間內采用畫8字的方式進行橢球分布,但是由于加速度計干擾噪聲以及響應時間等因素限制,對于單點采樣得到的測量數據會出現雜質點,無法獲得準確的標定參數。
因此,依據傳感器的輸出特點以及擬合要求制定出如下標定方案:
1) 待傳感器上電穩定后,在待標定固定位置點測量當地重力加速度;
2) 依據三軸加速度計在載體上的安裝方式(X軸對應載體滾轉軸),分別在俯仰45°、0°、-45°時,各繞滾轉軸旋轉一周;每周大致設置8個等分測量點,在每個測量點處靜止采集20 s;
3) 再次隨機旋轉載體,使其所處姿態對應測量點盡量覆蓋其余橢球曲面,每個測量點處靜止采集20 s;
4) 選取步驟2)、3)中得到的每段測量值的穩定數據求取均值,并保存為樣本數據;
5) 將步驟4)得到的數據擬合橢球曲面,獲得擬合橢球的中心點坐標與形狀參數;
6) 計算三軸加計的待標定參數,完成參數輸出。
在誤差模型的基礎上,由式(4)可得三軸加速度計測量校準模型為
a=K-1(Ua-Ua0)
(13)
式中:
為誤差補償系數矩陣。
根據式(12)利用擬合得到的橢球參數計算標定數據,將標定結果代入式(13),即可得到三軸加速度計的測量校準模型,利用該模型對三軸加速度計的測量結果完成誤差補償。
4 驗證
為了驗證該標定補償方法的可行性、有效性,以實驗室自行組建的慣性測量組合與采集存儲電路為測試平臺,如圖2所示,利用高精度三軸位置速率溫控轉臺進行了靜態標定實驗驗證。
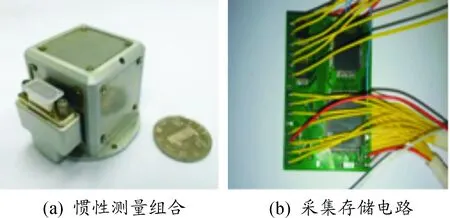
圖2 測試平臺
本實驗室自行組裝的慣性測量組合在X、Y、Z三軸分別集成有量程為±10 g的加速度計,根據3.1節中的標定方案對三軸加速度計進行現場標定試驗,并以5 kHz采樣率對傳感器輸出進行采集存儲。
根據上述三軸加速度計的在線標定模型,利用MATLAB軟件對試驗數據進行數據處理,擬合得到的最佳橢球曲面如圖3所示,其中橢球擬合殘差表示選取樣本數據與擬合數據之間的偏差,如圖4所示,若出現殘差過大的奇異點,證明該點數據測量時可能受到誤差干擾,將其濾除后重新擬合。最后根據所得橢球的形狀參數解算得到三軸加速度計的各項標定參數如下:
kx=0.218 25 V/g,ky=0.208 58 V/g,kz=0.217 19 V/g,Uax0= 2.509 76 V,Uay0= 2.512 98 V,Uaz0= 2.495 36 V,α=1.234 7°,β=-0.865 3°,γ=0.342 5°。
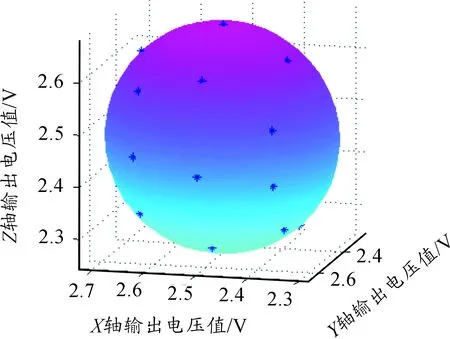
圖3 三軸加速度計輸出
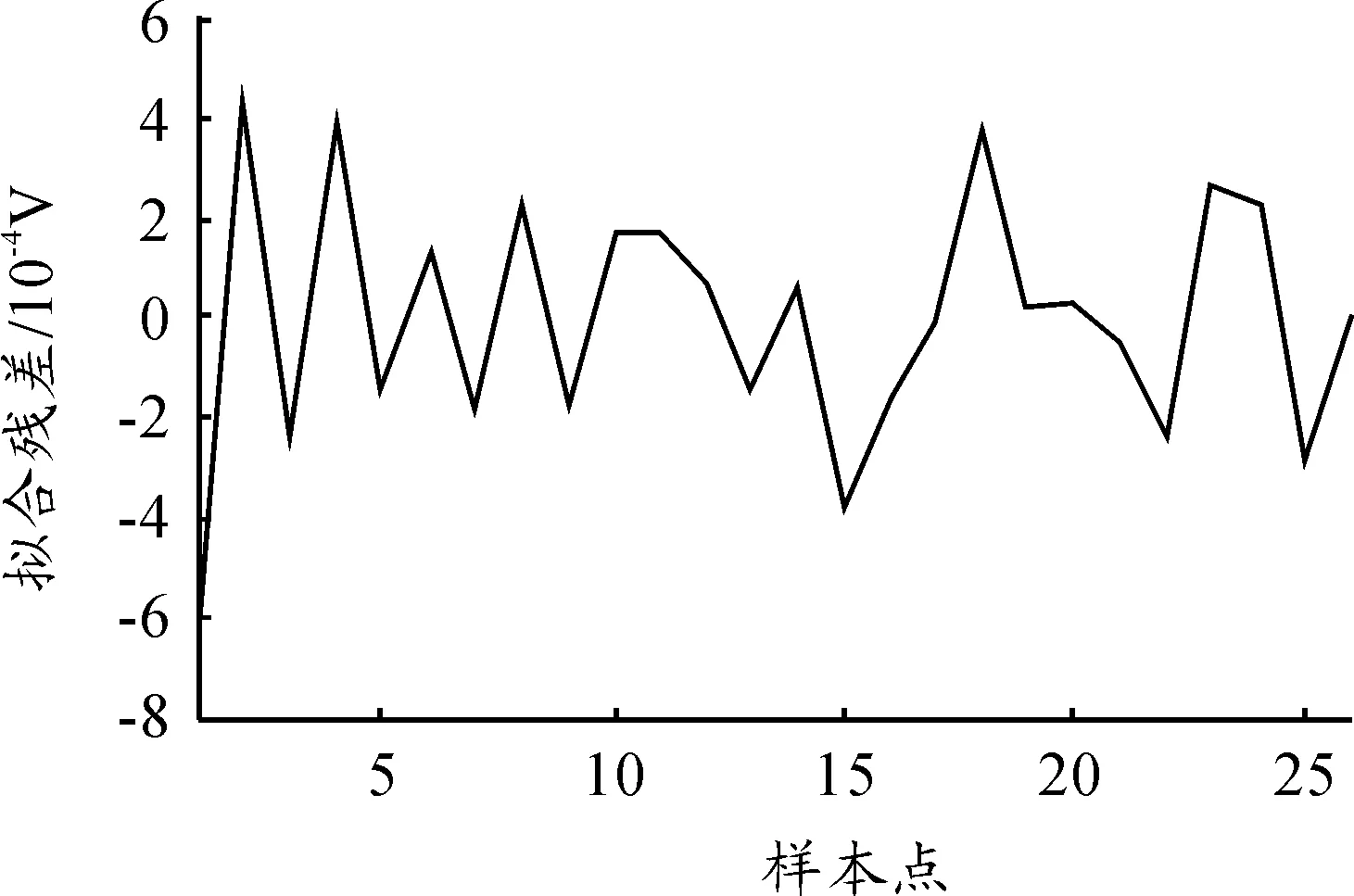
圖4 橢球擬合殘差
由以上獲得的標定參數計算得到三軸加速度計的誤差補償系數矩陣為
將慣性測量組合放置在三軸高精度位置速率轉臺上,根據三軸加速度計在載體上的安裝位置,將X軸和Z軸設置為水平狀態,Y軸敏感重力加速度,如圖5所示,進行多次采集試驗。
應用上述誤差補償矩陣對三軸加計輸出進行補償,其補償前后加速度計輸出對比曲線如圖6所示,對比數據如表1所示。
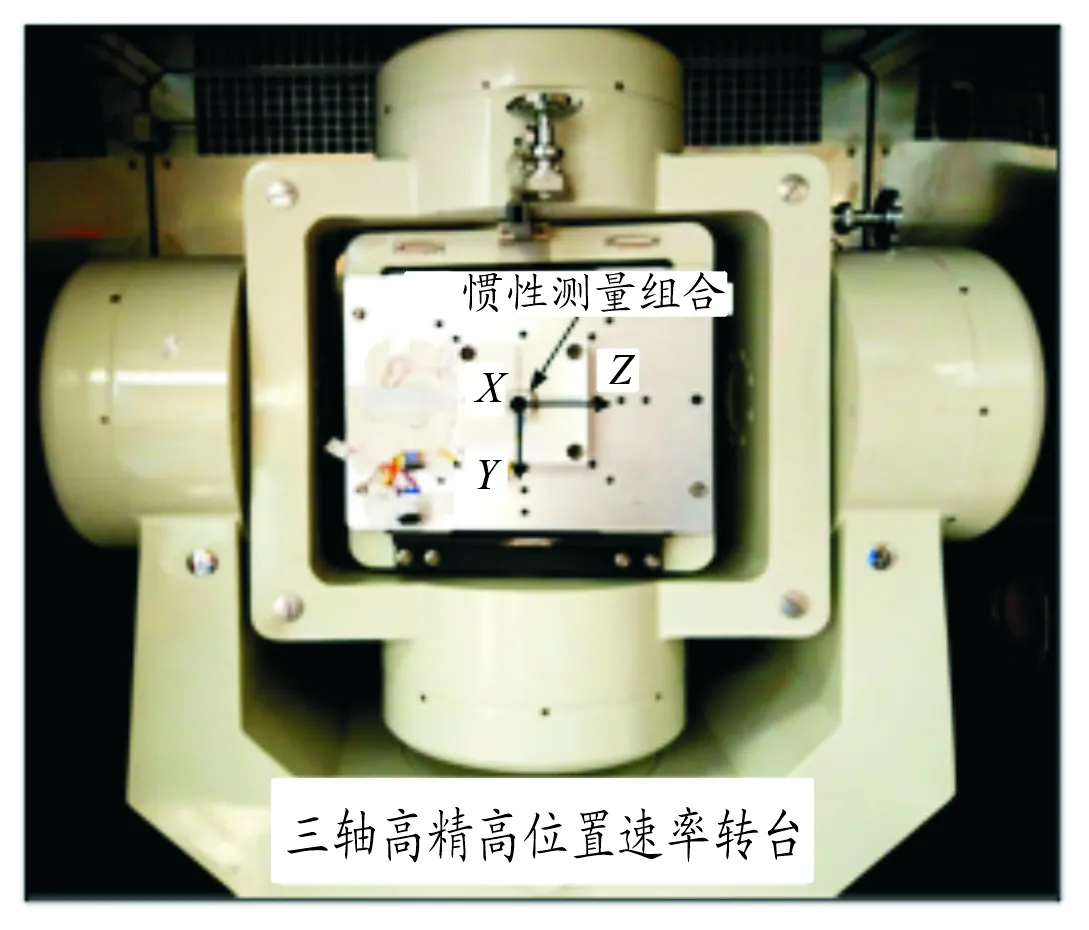
圖5 轉臺實驗
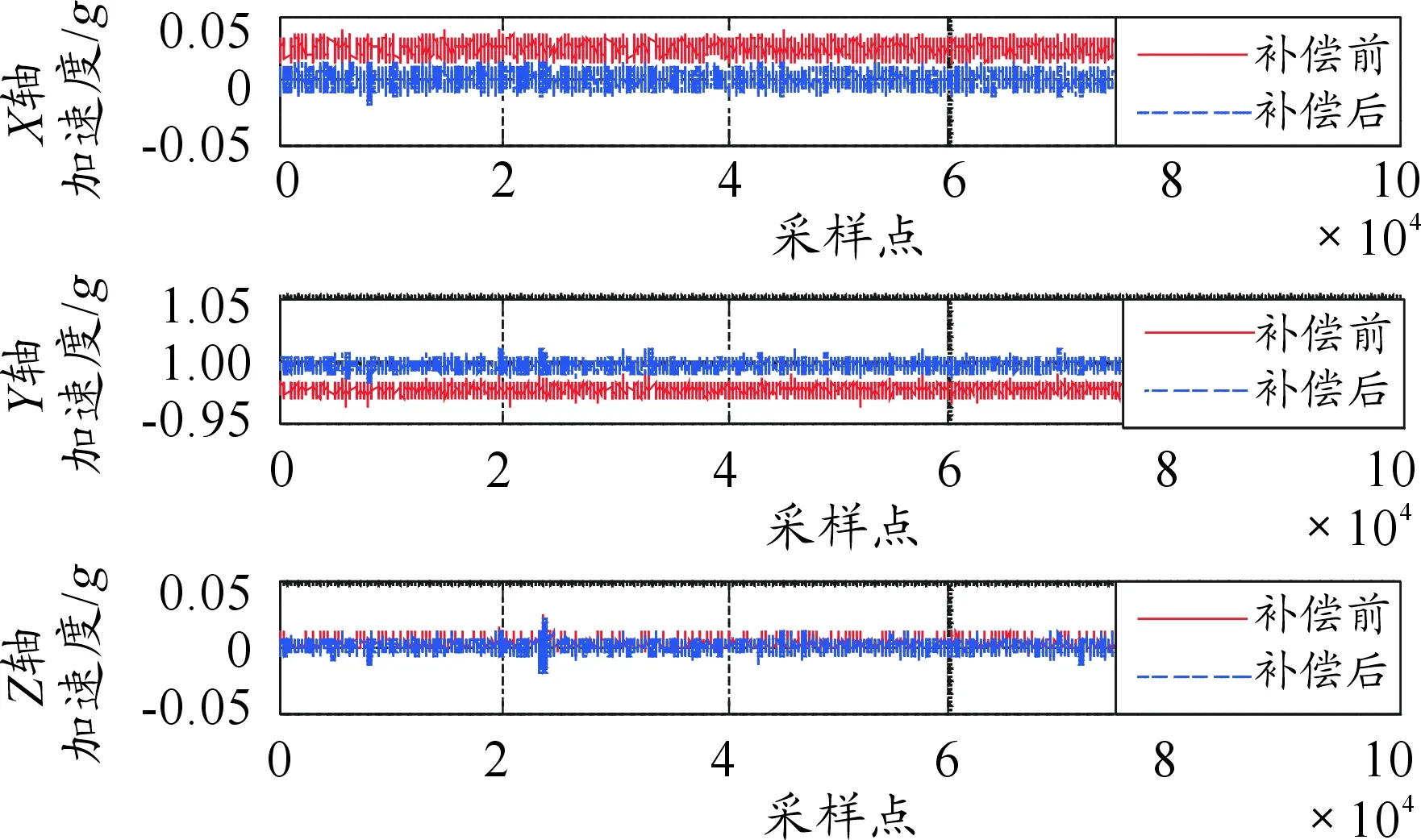
圖6 補償前后三軸加速度
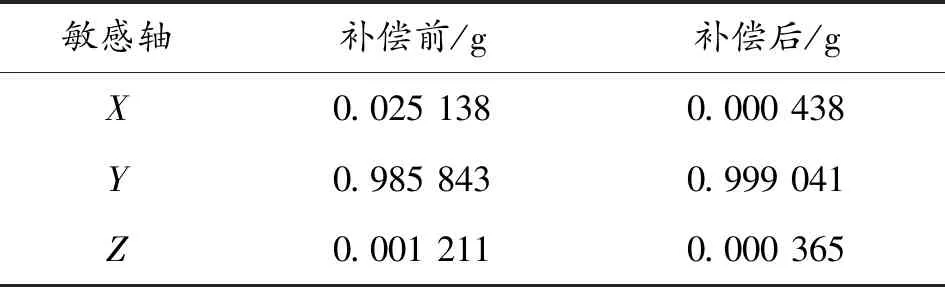
敏感軸補償前/g補償后/gX0.025 1380.000 438Y0.985 8430.999 041Z0.001 2110.000 365
由表1可得補償后的三軸加速度測量值與補償前相比,補償后三軸加速度測量誤差均小于1 mg,其補償效果與轉臺標定效果基本吻合,滿足標定精度要求。在現場標定過程中隨著擬合樣本數據的增加,使得測量數據盡可能全面地覆蓋擬合橢球曲面,其標定效果能夠與轉臺標定效果相當。實際應用中,由于加速度計零位和靈敏度隨時間推移而發生變化,對后期數據解算帶來的較大計算誤差,因此應用現場標定得到的零偏及其誤差補償系數矩陣對傳感器輸出進行誤差補償滿足實際數據解算需求。
5 結論
1) 對三軸加速度計輸出信號進行標定補償是提高慣性導航系統位置測試精度的有效途徑之一。
2) 針對三軸加速度計的零偏與靈敏度等各項標定參數因時間推移而無法得到有效應用,依據最小二乘法的橢球擬合原理實現對三軸加速度計測試標定,得到三軸加速度計的零位、靈敏度以及不正交安裝誤差角,無需精密的測試標定設備,修正過程簡單且易于實現,標定效果與轉臺標定效果相當,補償精度滿足實際數據解算要求,適合在載體在線快速標定,具有較高的工程應用價值。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
