磁極偏移對無齒槽無刷電動機振動與噪聲影響研究
2019-04-25 02:45:16汪思敏李新華崔舜宇
微特電機 2019年4期
關鍵詞:振動
汪思敏,李新華,崔舜宇
(湖北工業大學,武漢 430068)
0 引 言
目前,無齒槽高速永磁無刷直流電動機(以下簡稱無齒槽無刷電動機)在電動工具、醫療器械等領域應用越來越多。考慮制作工藝和成本等方面的要求,這種無齒槽無刷電動機轉子磁極用整體充磁磁環制成,但受到磁化裝置結構和磁化條件等的影響,磁環每極磁化分布可能出現偏移[1-3],即N,S極的寬度不一致,電機產生振動噪聲的不利影響。
文獻[4]以表貼式無刷直流電動機為研究對象,利用有限元方法分析由于磁環每極磁化程度不等導致的磁極偏移對電機性能的影響,結果表明,非對稱磁化分布形成了不規則的磁力分布波形,相對于對稱磁化時,磁力幅值增大10倍左右,但沒有進一步分析非對稱磁化分布對電機振動噪聲的影響。文獻[5]采用有限元方法對高速電機中由于磁心充磁角度偏差導致的不平衡磁拉力(電機定子與轉子之間由于不均勻氣隙而產生的不均衡磁拉力)進行研究,分析表明,不平衡磁拉力隨偏差角度增大而增大,卻沒有進一步分析由于充磁角度偏差對電機振動噪聲的影響。分析電機的振動噪聲主要從電機的徑向電磁力、固有振動模態和噪聲三個方面進行。徑向電磁力由主磁通及其諧波在定子齒部徑向產生[6],文獻[7-8]通過解析法計算表貼式無刷直流電動機的磁場分布,從而利用應力張量法計算表貼式無齒槽無刷直流電動機的徑向電磁力,為分析計算電機的電磁振動和噪聲奠定理論基礎。但解析法無法精確計算非線性問題,Islam M S等學者從電機結構出發,利用有限元法和麥克斯韋應力張量法對電機的徑向電磁力進行分析計算,并分析了不同極槽配合下分數槽永磁同步電機的振動噪聲特點[9-10]。文獻[11]研究了永磁無刷直流電動機的電磁力對電機振動噪聲的影響,并在此基礎上,研究分析在洗衣機中使用的內置式永磁電動機的振動噪聲對結構動力特性的影響。
本文以實驗室研制的一對極無齒槽無刷電動機樣機為對象,研究轉子磁極偏移對電機振動噪聲的影響。首先運用解析模型計算磁極偏移時電機的空載氣隙磁密、徑向電磁力,并與仿真結果作比較;然后用有限元方法分析電機磁極偏移的振動與噪聲;最后對樣機的模態、振動加速度及噪聲進行了測試及分析。
1 空載氣隙磁密與徑向電磁力波
1.1 空載氣隙磁密
圖1是轉子磁極偏移的一對極無齒槽無刷電動機分析模型。該電機定子鐵心為無槽結構,定子繞組直接粘貼在定子鐵心內表面。轉子磁環由釹鐵硼永磁材料制成,直接套在轉軸上。電機參數如表1所示。由于無刷電動機定子鐵心無齒槽,且轉子為整體充磁的磁環結構,氣隙均勻,故可用解析方法分析電機的空載氣隙磁密。分析時假設:定子鐵心磁導率為無窮大;永磁體徑向磁化;氣隙中磁場沿電機軸向均勻分布;轉子不存在偏心情況。
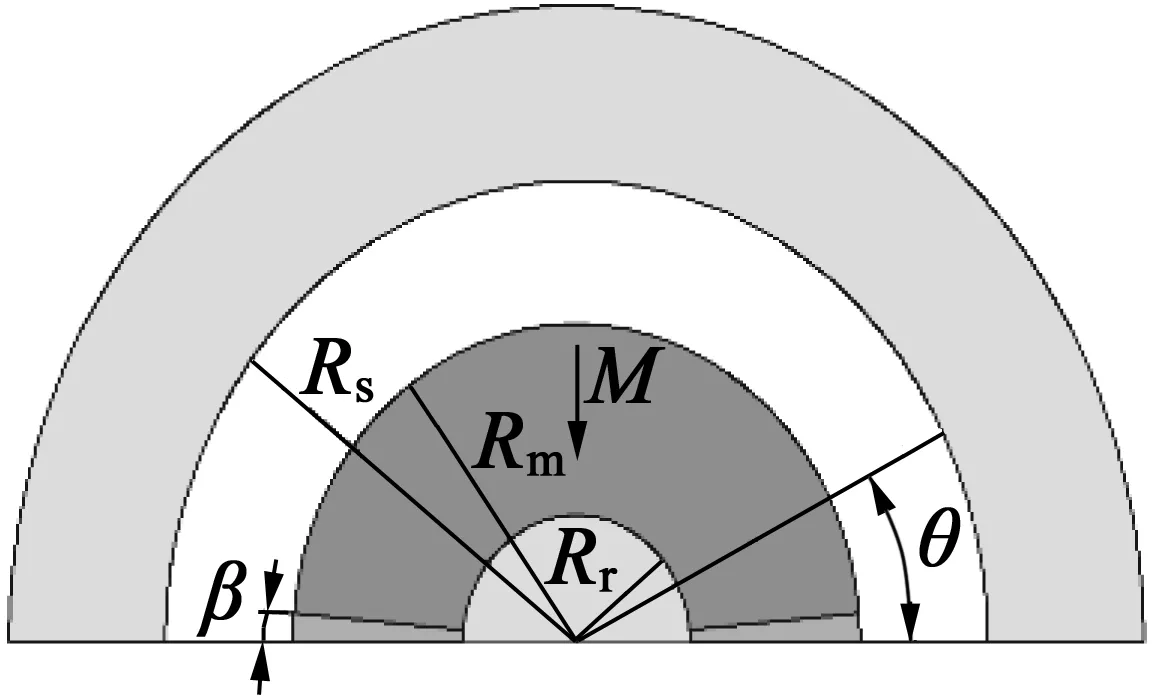
圖1 磁極偏移無齒槽無刷電動機分析模型
參數數值定子鐵心內徑Rs /m0.014 5轉子磁鋼外徑Rm /m0.010 0轉子磁鋼內徑Rr /m0.004 0 定轉子鐵心軸長l/m0.094 0釹鐵硼剩余磁通密度Brpm /T1.23
下面用極坐標系來分析。無齒槽無刷電動機氣隙標量磁位滿足拉普拉斯方程,轉子永磁體中標量磁位滿足泊松方程[12],即:
其邊界條件:
(2)
式中:φ1,φ2分別為無齒槽無刷電動機氣隙和永磁體中的標量磁位;r為半徑;θ為空間電角度;μr為永磁體的相對磁導率;Mn為永磁體磁化強度,其表達式:
(3)
式中:μ0為空氣磁導率。
永磁體磁化強度沿空間分布波形如圖2所示,圖2中實線和虛線分別為磁極偏移磁化和對稱磁化時的磁化強度沿空間分布波形,Brpm為永磁體的剩余磁通密度,β為磁極偏移角。
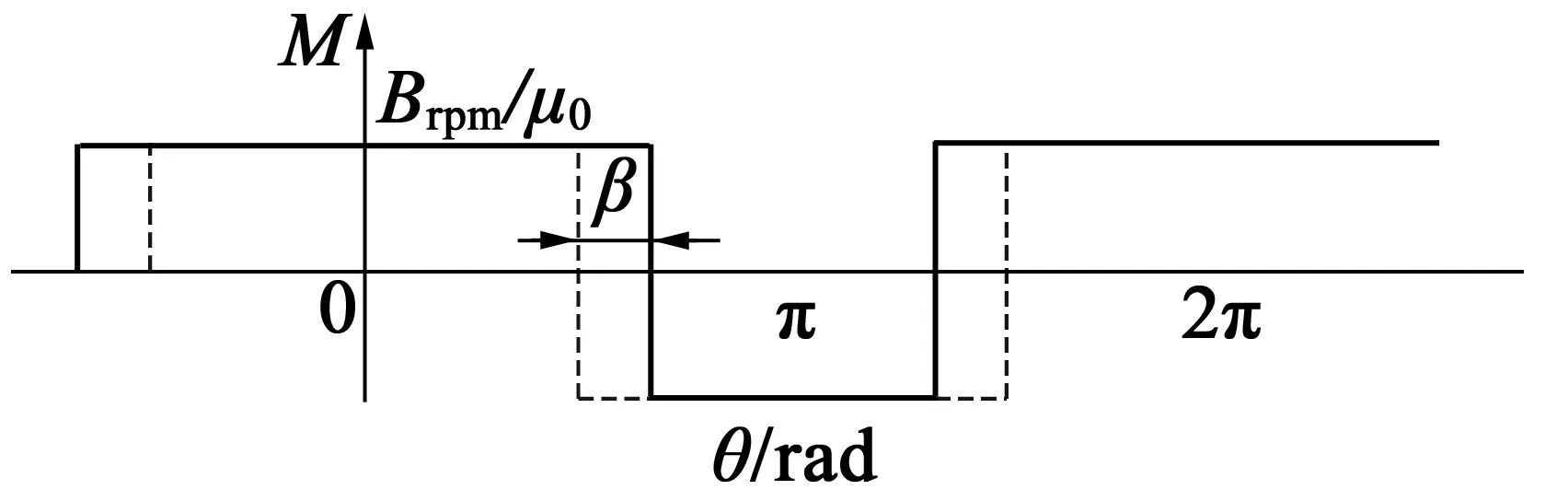
圖2 永磁體磁化強度空間分布圖
由式(3)可知,隨著偏移角度β(0 <β<π/2)的增加,永磁體磁化強度Mn減小。
根據邊界條件式(2),式(1)的定解:
(4)
式中:
當n=1,r=Rs時,可得到定子鐵心內表面處的徑向氣隙磁密:
(5)
將表1中的數據代入式(5),據此可畫出磁極偏移10°時的氣隙磁密波形,如圖3所示,圖3中的實線、虛線分別代表磁極偏移10°時的氣隙磁密波形和有限元仿真波形。可見兩波形基本吻合,表明解析結果的正確性。
與磁極對稱相比,磁極偏移10°時磁極跨距大的一極對應幅值減小,磁極跨距小的一極對應幅值增大,且增大幅度與減小幅度一致,如圖4所示。
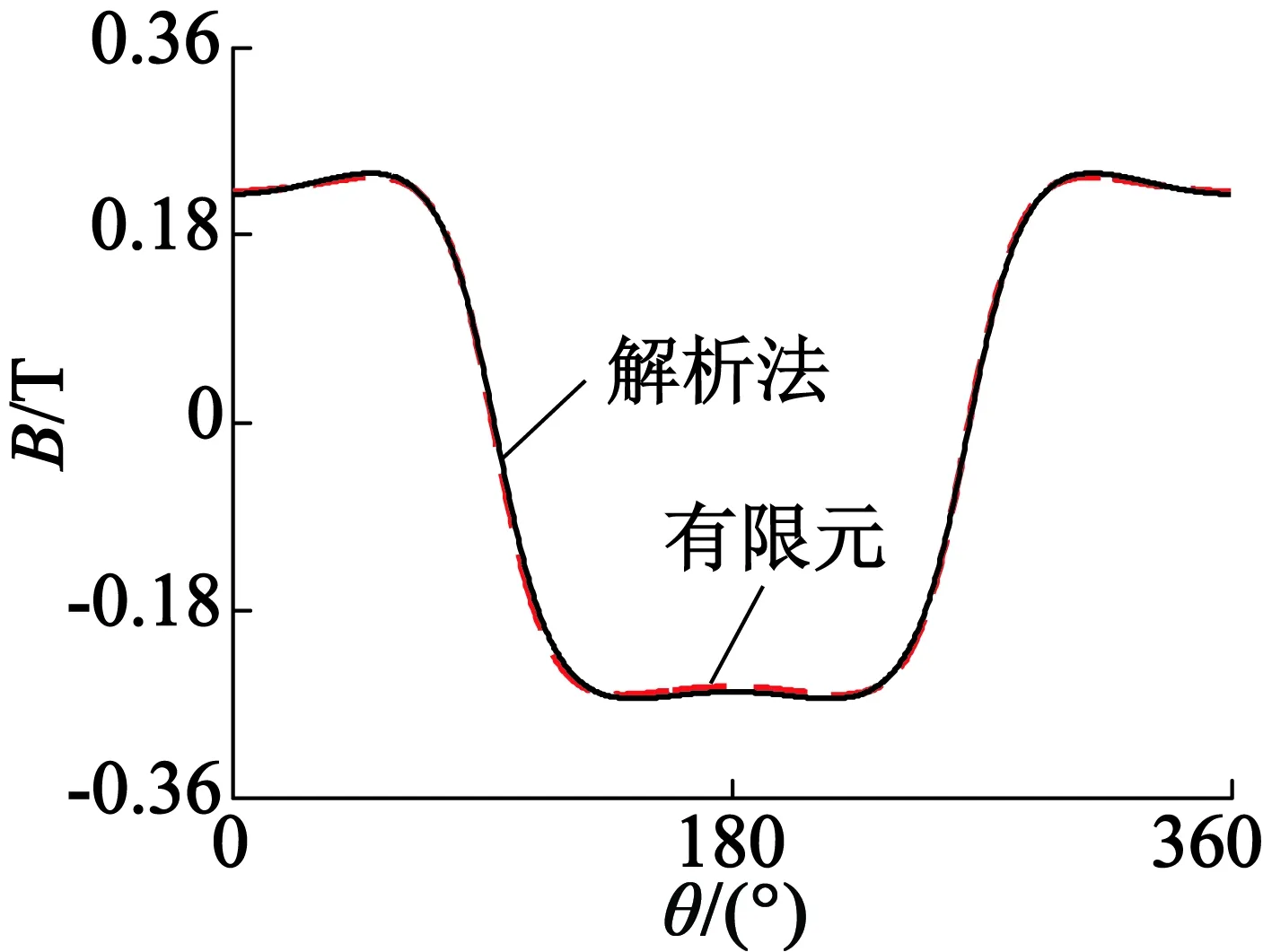
圖3 磁極偏移10°時解析和有限元結果比較
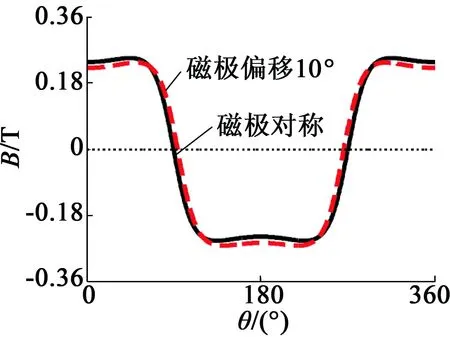
圖4 磁極對稱和偏移時的氣隙磁密波形
1.2 徑向電磁力
用麥克斯韋應力張量法計算作用在定子內表面的徑向電磁力[13-14]:
(6)
式中:Br為電機的定子內表面的徑向氣隙磁密。
把式(5)代入式(6)即可求出作用在定子內表面側的徑向電磁力,并與有限元仿真結果對比,得到徑向電磁力波形對比及頻譜分析圖,如圖5所示。
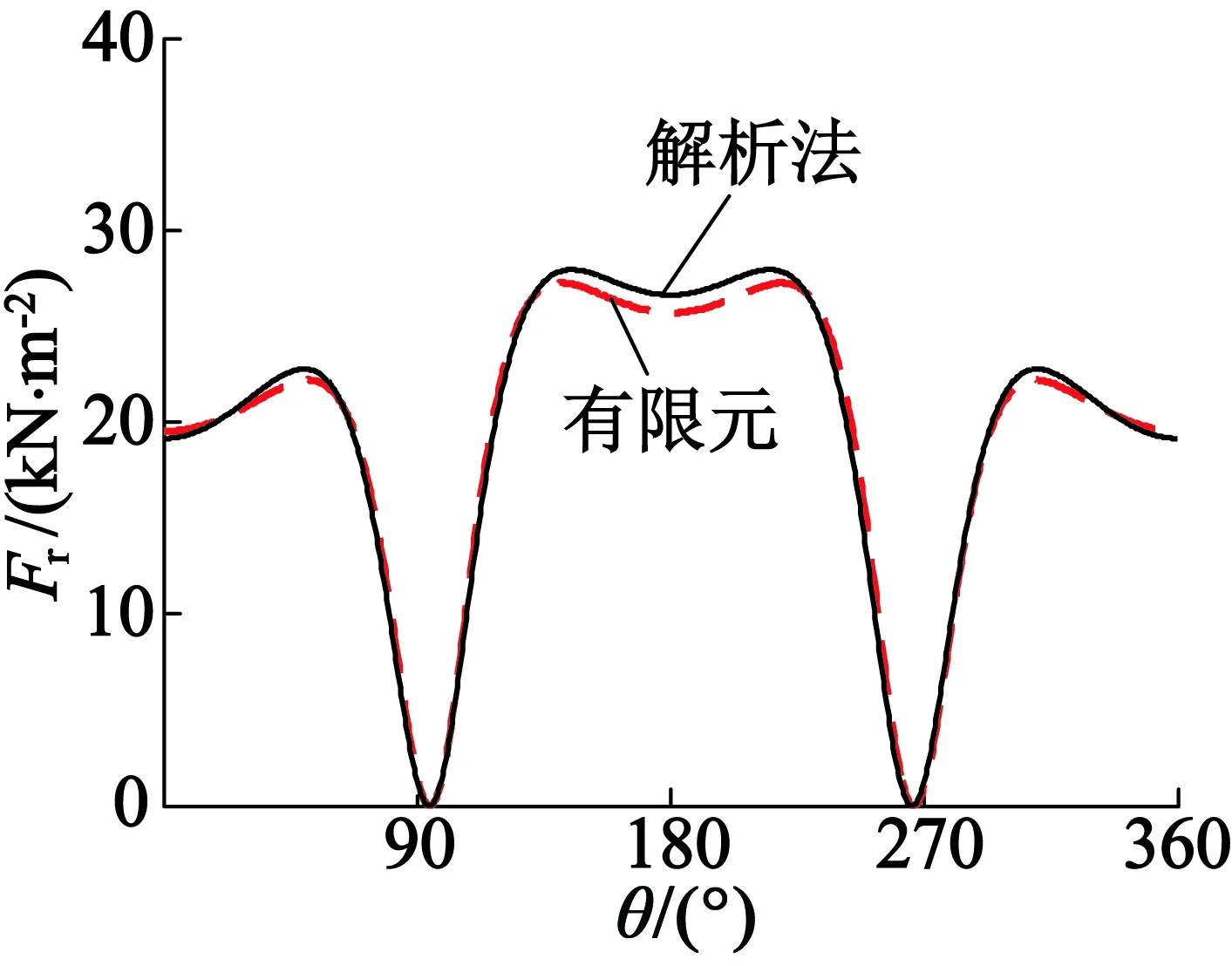
(a) 磁極偏移10°
(b) 頻譜分析
從圖5(b)可以看出,與磁極對稱相比,磁極偏移時出現了非極數倍數次電磁力諧波,且幅值較大;其它極數倍數次電磁力諧波隨著頻率增高幅值依次減小,而2次諧波幅值仍較大;特別是磁極偏移后,出現了極對數次的電磁力諧波,且該階次下的電磁力幅度隨電機磁極偏移角度增加而增加,對電機的振動與噪聲有一定影響。
2 振動與噪聲仿真分析
將不同磁極偏移角度下電機的空載電磁力耦合到仿真軟件ANSYS Workbench中建立模型[15],得到無齒槽無刷電動機空載時定子鐵心振動加速度曲線,如圖6所示。表2給出了無齒槽無刷電動機固有模態頻率的解析和仿真計算結果。
(a) 磁極對稱
(b) 磁極偏移10°

二階三階四階五階解析值fa/Hz9 05818 18028 47239 704仿真值fs/Hz10 85918 77429 57943 259
從圖6可以看出,磁極對稱和偏移時振動加速度幅值隨頻率變化趨勢一致,且都在87f(12 427 Hz,f為電頻率)處振動加速度幅值達到最大值,隨后幅值遞減。雖然87f對應的電磁力幅值不高,但所處區域頻率過高,振動加速度與頻率的平方成正比,所以振動加速度較高。而且該頻段與電機二階模態頻率接近,會導致電機產生共振。磁極偏移后,低頻段(0~5 kHz)處振動加速度幅值增加,特別是150 Hz時電機振動加速度增大了20倍,該頻率與電機徑向力的極對數次諧波頻率接近,而電機的非極數倍數次徑向電磁力諧波幅值隨磁極偏移角度增大而增大。
圖7給出了無齒槽無刷電動機最大振動加速度與磁極偏移角的關系曲線。隨著偏移角度的增加,最大振動加速度幅值增大。特別地,當磁極偏移角大于15°時,最大振動加速度急劇增加。從限制振動加速度角度看,無齒槽無刷電動機磁極端偏移角應控制在5°以內。
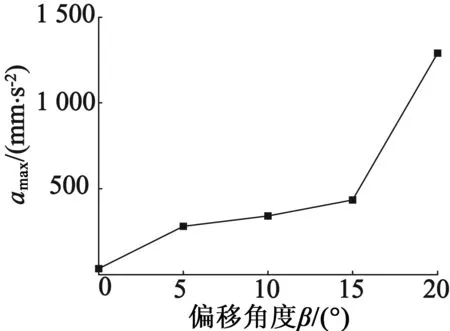
圖7 最大振動加速度與磁極偏移角的關系
將機殼表面的加速度耦合到噪聲分析模塊中,得到無齒槽無刷電動機電磁噪聲的仿真結果,如圖8所示。
由圖8可見,在不同偏移角度下,最大噪聲均出現在頻率12 427 Hz處,該頻率與最大振動加速度對應的頻率一致,說明電機最大聲壓級的影響因素之一是最大振動加速度,而且該頻率與電機二階模態對應頻率接近,產生共振。對比磁極對稱與偏移時電機的噪聲分布可以看出,在磁極偏移時低頻段(0~5 000 Hz)處電機聲壓級增大,該頻段與電機非極數倍數次電磁力諧波對應的頻率接近。由于電機振動噪聲主要是由氣隙中作用在定子齒部的徑向電磁力引起的,磁極偏移后,非極數倍數次電磁力諧波大幅度增加,故低頻段電機聲壓級增大。由圖8(c)可以看出,電機最大噪聲隨著偏移角度的增加而增大。
(a) 磁極對稱
(b) 磁極偏移10°
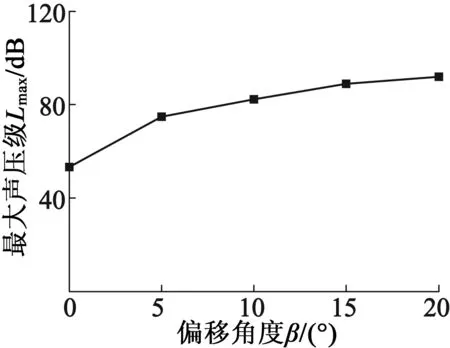
(c) 不同偏移角度下噪聲對比結果
3 實驗驗證
為了驗證理論分析和仿真結果的正確性,試制了一臺一對極100 W,8 600 r/min無齒槽無刷電動機樣機,樣機磁環分別制作了磁極對稱和磁極偏移2°兩個轉子,并構建了無齒槽無刷電動機振動噪聲實驗平臺,如圖9所示。表3為無齒槽無刷電動機樣機固有模態的實驗結果。

圖9 樣機振動與噪聲實驗平臺

階數二階三階四階五階實驗值ft/Hz10 23717 93427 89339 765
對比表2和表3中的結果,各階模態實驗值均小于仿真結果。因為模態仿真時的三維模型只考慮電機定轉子及機殼對固有模態的影響,實際樣機比模型重,導致各階模態仿真頻率偏高。
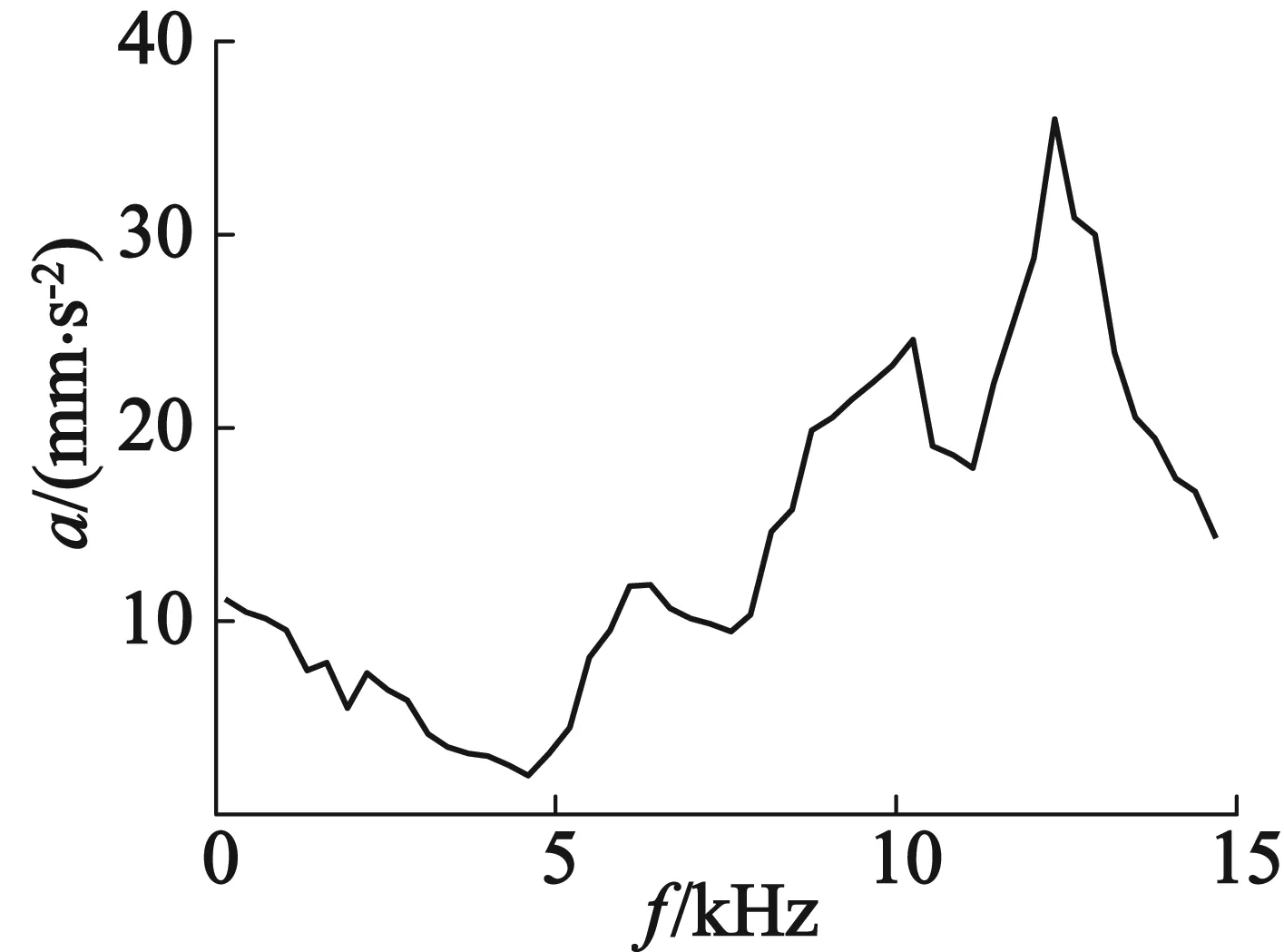
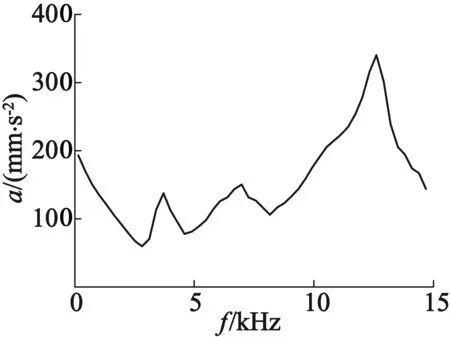
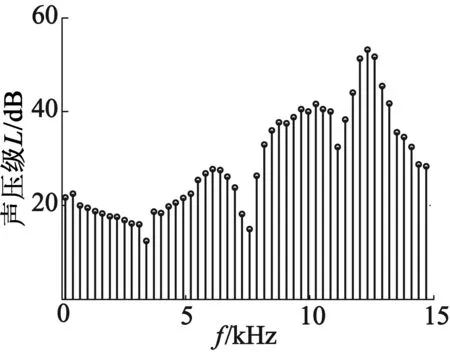
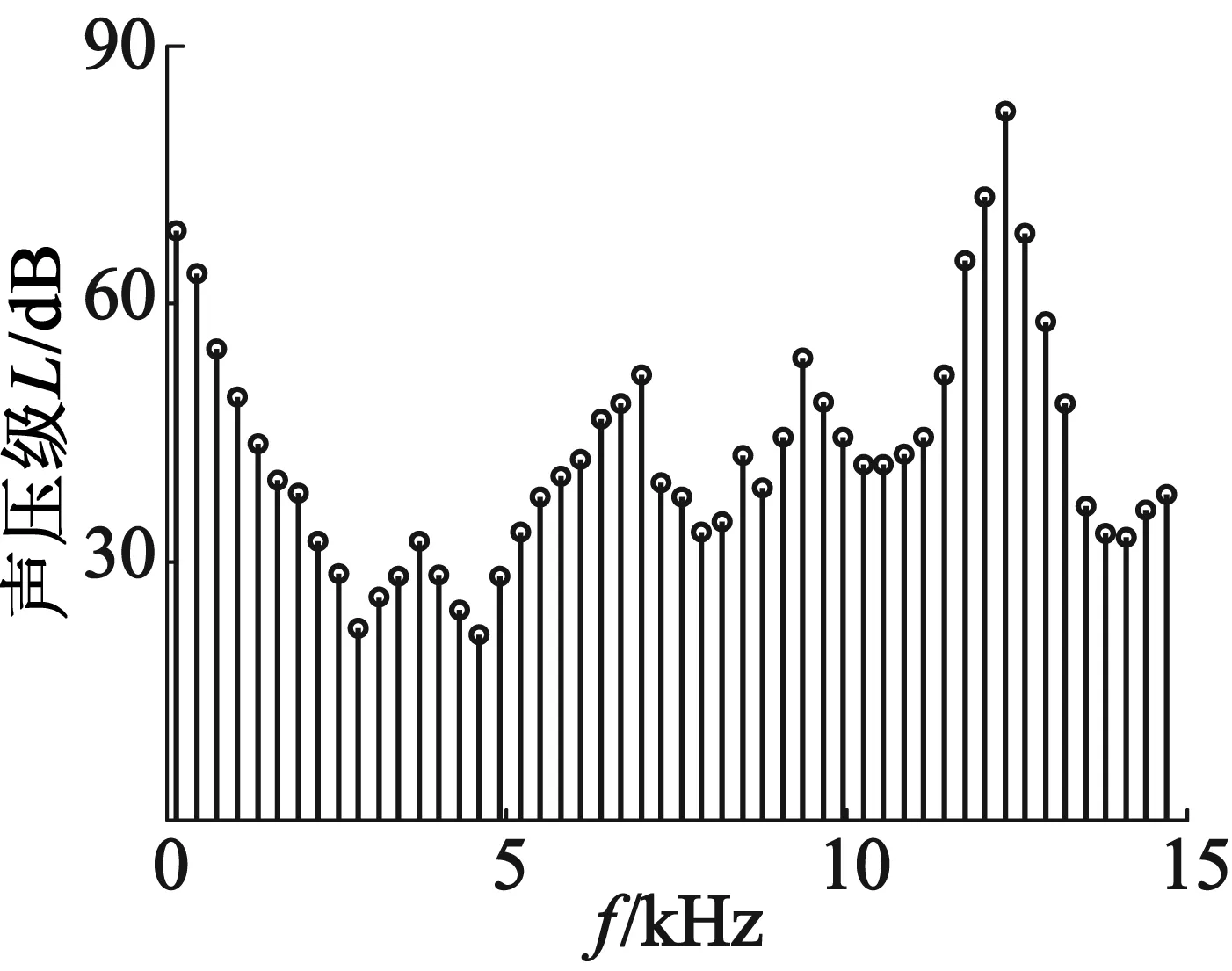
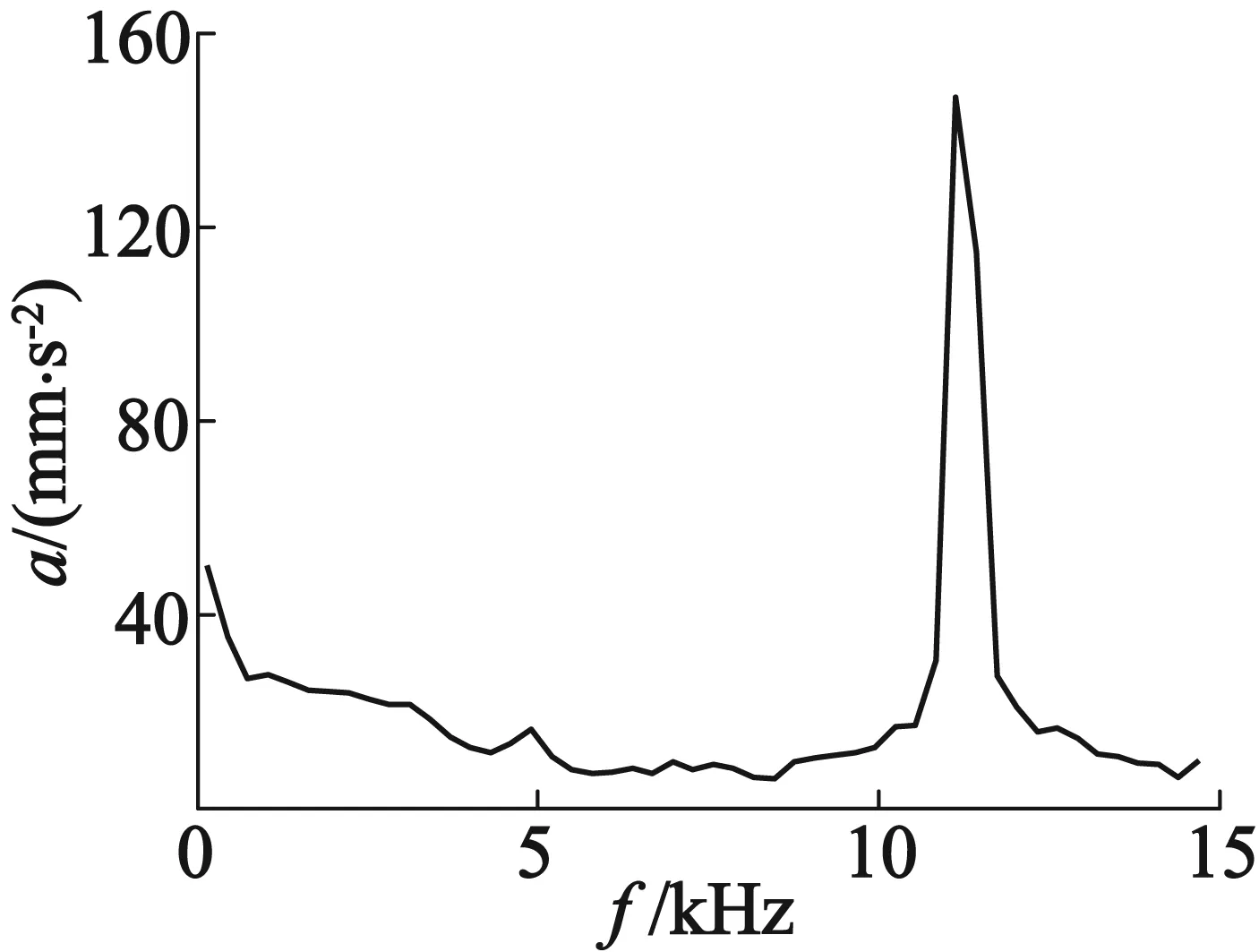
比較圖6(a)、圖8(a)與圖10可以看出,電機最大振動加速度和最大聲壓級對應的頻率一致,仿真結果中最大振動加速度對應頻率為12 427 Hz,而實驗中最大振動加速度對應頻率為11 139 Hz。振動加速度頻譜的諧波成分豐富,主要集中在高頻段10 000~15 000 Hz,與樣機二階固有模態頻率重合,發生二階共振,導致聲壓級較大。樣機仿真最大聲壓級為53 dB,出現在12 427 Hz;實驗樣機的最大聲壓級為57 dB,對應頻率為11 139 Hz,與最大振動加速度對應。
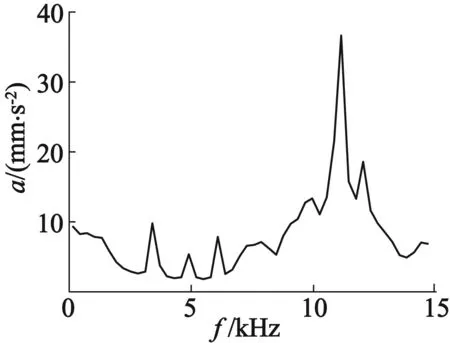
(a) 振動加速度
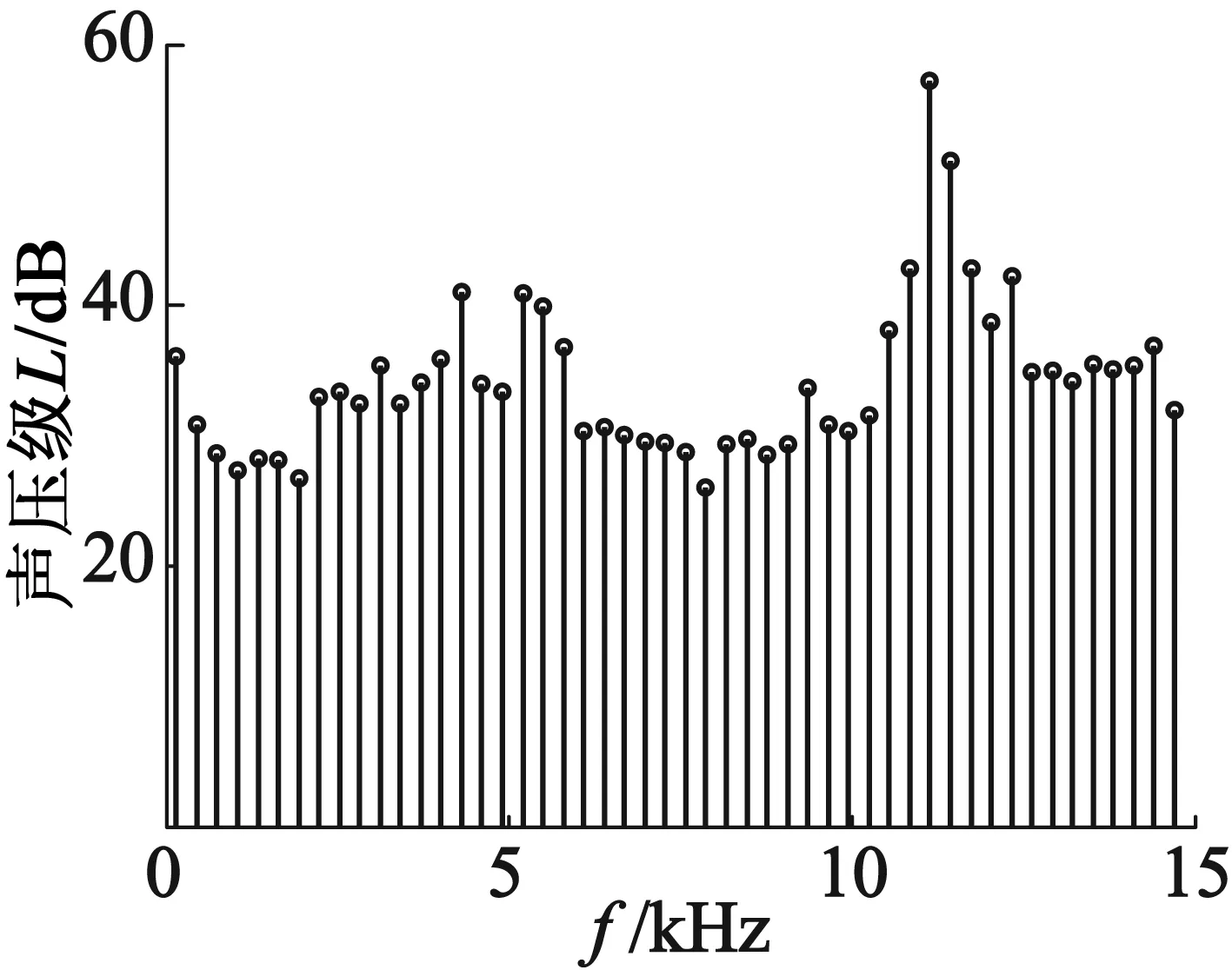
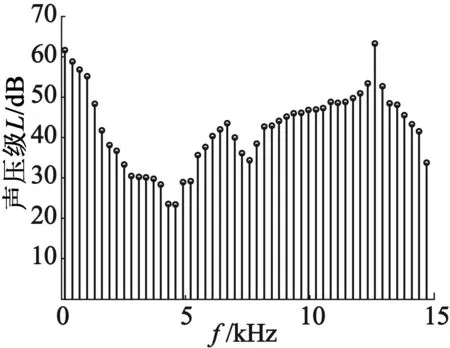
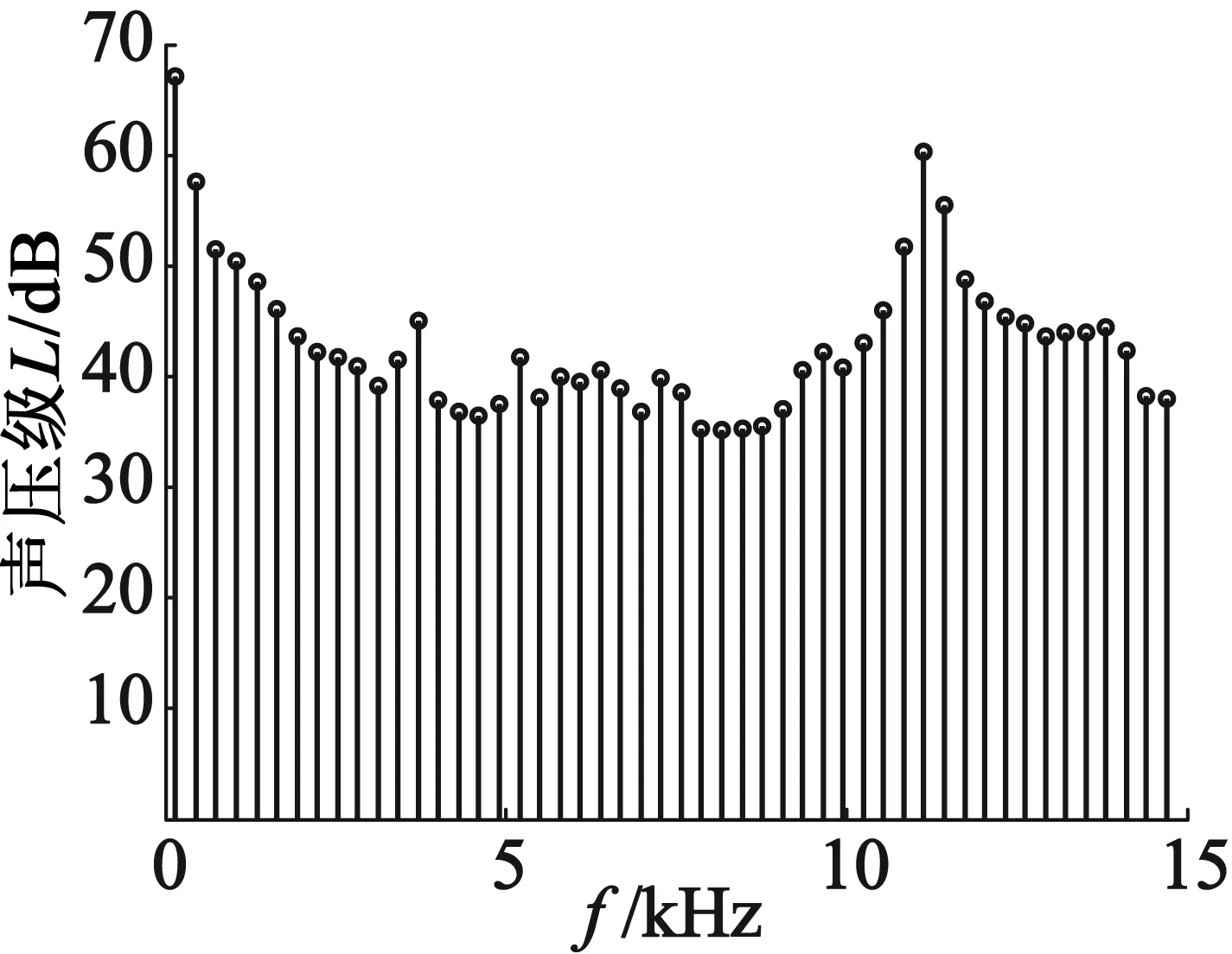
(b) 電磁噪聲
(a) 振動加速度仿真結果
(b) 振動加速度實驗結果
(c)電磁噪聲仿真結果
(d) 電磁噪聲實驗結果
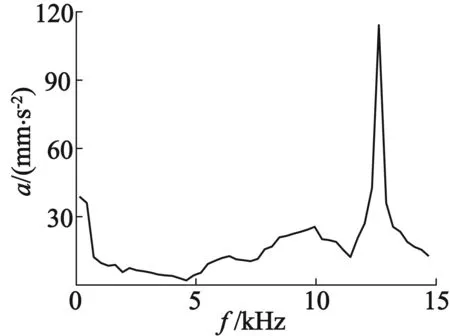
對比圖11磁極偏移2°時振動加速度與噪聲的仿真和實驗結果,在低頻段(0~5 000 Hz)和高頻段(10 000~15 000 Hz),均出現較大的振動加速度,而且低頻段的振動加速度值比磁極對稱時增大,最大振動加速度為38.75 mm/s2(150 Hz),對應頻率與電機的極對數次徑向力諧波的頻率(143.3 Hz)一致,該次諧波下電磁力幅值隨偏移角度增加而大幅增加,所以對應頻率下電機聲壓級增大。該頻率對應的電機聲壓級仿真值為62 Hz,實驗值67 Hz;而高頻段電機發生二階共振,聲壓級較大,仿真值為63 dB(12 427 Hz),實驗值為60 dB(11 139 Hz),與振動加速度對應。
4 結 語
無齒槽無刷電動機轉子磁極偏移后,電機徑向力波的非極數倍數次諧波大幅度增加,特別是極對數次諧波,該階次下電磁力諧波幅值隨偏移角度增加而大幅度增大,對電機的低頻段振動噪聲影響較大,而高頻段與電機二階固有模態接近,電機發生二階共振;電機的最大振動加速度幅值隨磁極偏移角度增加而增大。從限制振動加速度角度看,磁極偏移角應控制在5°以內。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00