跟蹤微分器在光電火控系統中的應用
2019-04-23 03:57:26楊文光武亮明張建偉
火力與指揮控制 2019年3期
李 靜,楊文光,武亮明,張建偉
(北方自動控制技術研究所,太原 030006)
0 引言
防空高炮光電火控系統(以下簡稱光電火控系統)主要由光電跟蹤系統、火控計算機、火炮隨動系統組成[1]。對于光電跟蹤系統,當目標進入探測器視場中,視頻取差器會獲取目標相對于視場中心的偏差角度,以此偏差量作為誤差,控制光電跟蹤系統的伺服轉臺轉動以跟蹤目標。由于視頻取差器運算、數據傳輸都需要時間,所以光電跟蹤系統所接收到的偏差量其實是滯后的,這直接影響了系統的跟蹤性能;火炮隨動系統常隨動于光電跟蹤系統進行,火控機為火炮隨動系統提供位置指令驅使其運動,當大系統內存在干擾時,隨動很可能將其放大進而無法實現平穩跟蹤,進而影響目標的精確打擊。
非線性跟蹤微分器[2]主要用于解決在帶隨機噪聲的測量信號中,對其進行濾波并且合理提取其微分信號的問題,故跟蹤微分器在電動機控制[3]、機器人[4]、飛行器[5]等控制系統中有廣泛的應用。本文利用非線性跟蹤微分器,通過光電轉臺位置與隨動位置,得到濾波后的目標位置,以此來驅動隨動運動,同時還提取出目標速度,用來對取差量進行預測。仿真和試驗證明,采用非線性跟蹤微分器的光電火控系統,在跟蹤精度上有明顯的提升。
1 跟蹤微分器
一個二階跟蹤微分器可以用如下定理來描述。
定理1:若系統
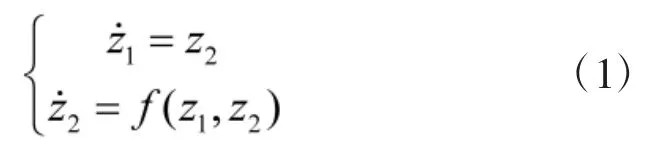
式(1)的所有解都有界且滿足:

則對任意有界可測函數 v(t),t∈[0,+∞]和任意T>0,微分方程

式(1)的解x1(r,t)滿足

其中,r為跟蹤速度因子,v為參考輸入。定理說明,隨著參數r的增大,系統的解x1(r,t)在有限時間內,都能充分地逼近輸入信號v(t),從而可以把x1(r,t)的微分x2(r,t)當作輸入信號v(t)的微分信號。
式(3)中,根據不同的加速度函數式f,可以構造出不同的跟蹤微分器[6]。一種具體的跟蹤微分器—離散最速型跟蹤微分器[7]形式為:

其中:T為采樣時間,fhan函數形式為:
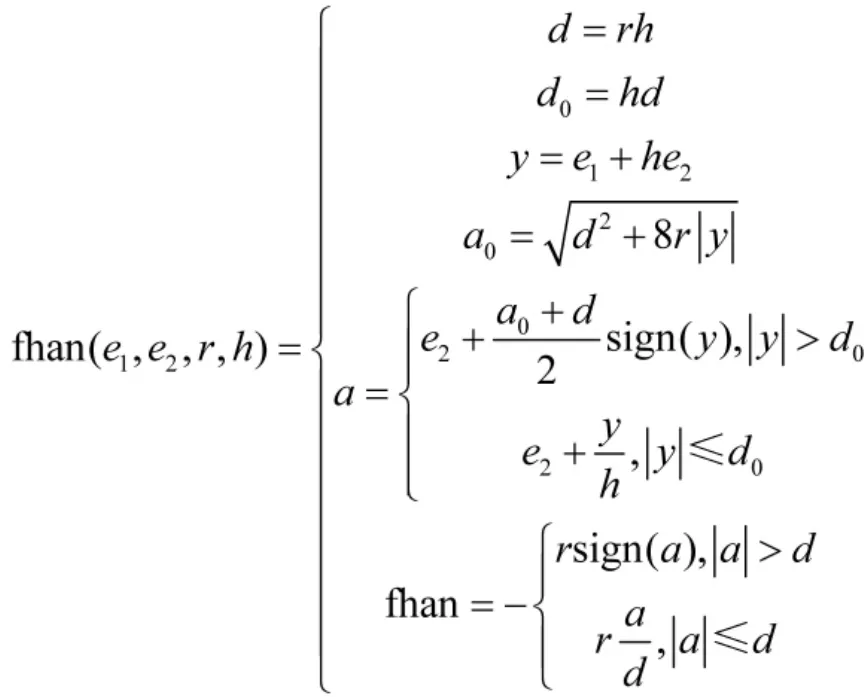
r和h分別為速度因子和濾波因子。
2 跟蹤微分器應用于光電火控系統
對于光電火控系統高低向,光電跟蹤系統與火炮隨動系統無耦合,且目標高低向最大角速度通常遠低于方位向最大角速度,故本文只考慮對方位向的控制策略進行改進,光電火控系統一般控制結構如圖1所示[8]。
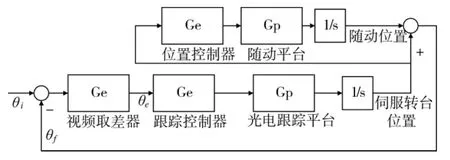
圖1 光電火控系統一般控制結構
在跟蹤目標時,目標在系統坐標系下的空間角為θi,系統的指向角為θf,二者存在的偏差角度θe通過視頻取差器測量得到。光電跟蹤系統主要通過閉環控制來主動消差,火炮隨動系統則隨動于伺服,通過消除與伺服轉臺的位置偏差,來驅動其運動。
因為視頻取差器運算以及數據傳輸會使得誤差量θe存在滯后,尤其是在過航點附近,目標速度較大時,時間滯后對系統跟蹤帶來的影響會更大,所以考慮對取差值作預測處理;大系統中難免會引入一些干擾,而火炮隨動系統因為慣量較大,模型復雜,很容易對干擾進行放大,進一步使大系統平穩性變差,因此,考慮對火炮隨動系統指令作濾波處理,避免將干擾引入火炮隨動系統。
在系統對目標進行跟蹤時,伺服轉臺位置與隨動位置的和可等效地看成目標位置,以此作為輸入,通過離散最速跟蹤微分器可得到濾波后的目標位置θi',并提取出其微分信號,也即目標速度wi'。采用跟蹤微分器的光電火控系統控制結構圖如圖2所示。

圖2 采用跟蹤微分器的光電火控系統控制結構圖
在得到濾波目標位置θi'和目標速度wi'后,一方面,通過θe+wi'×t公式對跟蹤誤差進行預測(其中t為視頻取差器的滯后時間,一般由廠家提供或通過試驗測試得到),以彌補取差值的滯后,圖2中的T環節代表此預測處理環節;另一方面,利用θi'作為隨動系統的位置指令,如圖2中隨動位置閉環所示。
3 仿真與試驗
使用MATLAB對跟蹤微分器的濾波和微分特性進行仿真,首先生成勻速直線模擬航路,對生成位置曲線離散化并加入一定噪聲,以此作為位置輸入,利用跟蹤微分器對其進行濾波和速度求取,仿真結果如圖3~圖5所示。
從仿真結果可以看到,跟蹤微分器可以較好地對位置信號進行還原以及對其速度信號進行提取。

圖3 跟蹤微分器位置求取結果
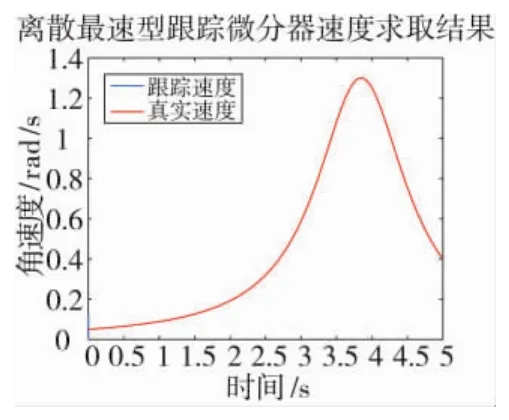
圖4 跟蹤微分器速度求取結果
為驗證采用跟蹤微分器的光電火控系統在跟蹤性能方面的優越性,選擇某防空武器系統,共進行了兩組試驗。
試驗1:令系統對勻角速度圓周運動目標進行跟蹤,加入一定擾動后,原有光電跟蹤系統的跟蹤誤差如圖6所示,圖中橫坐標為采樣點,采樣間隔為20 ms,可以看到,誤差峰值為4 mrad。其他策略保持不變,采用跟蹤微分器進行目標位置濾波后,用濾波后的位置作為隨動系統的位置指令,此時光電跟蹤系統跟蹤誤差如圖7所示,誤差峰值下降到0.06 mrad。
試驗2:對勻速直線運動航路進行跟蹤,并對自動跟蹤模式開始到過航處進行誤差統計,其他策略保持不變,加視頻取差器誤差預測前后的跟蹤誤差圖分別如圖8和圖9所示。從結果中可以看到,加誤差預測前過航處跟蹤誤差接近1 mrad,而添加誤差預測策略的系統在過航處誤差降到0.1 mrad以內,其系統誤差要更小。
綜上,采用跟蹤微分器的光電跟蹤系統,相對跟蹤性能有了明顯的改善。

圖6 原有系統跟蹤誤差圖

圖7 位置濾波后跟蹤誤差圖

圖8 原有系統跟航路時誤差圖

圖9 加預測后跟航路時誤差圖
4 結論
在通過仿真驗證了跟蹤微分器的濾波和微分性能的基礎上,將其應用在現有光電火控系統中,一方面彌補了跟蹤誤差的滯后;另一方面,對隨動指令進行平滑,避免了其對干擾的放大。仿真和試驗證明,采用跟蹤微分器的光電火控系統,在跟蹤精度上有了明顯的提升。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
