一種組網(wǎng)探測資源管控拓?fù)淠P蛢?yōu)選算法*
2019-04-23 03:56:38段艷紅丁建江趙志強(qiáng)
火力與指揮控制 2019年3期
段艷紅,丁建江,趙志強(qiáng)
(1.空軍預(yù)警學(xué)院,武漢 430019;2.空軍裝備部,北京 100034;3.解放軍95333部隊(duì),長沙 410114)
0 引言
目前,空天目標(biāo)種類多樣性、特征復(fù)雜性、突襲方式靈活性、威脅嚴(yán)重性,催生了預(yù)警探測裝備向體系級(jí)不斷發(fā)展。雷達(dá)組網(wǎng)系統(tǒng)[1]作為體系探測裝備中的一種,具有有形(如雷達(dá))和無形(如頻率協(xié)同)的探測資源以及基于網(wǎng)絡(luò)體系結(jié)構(gòu)[2]的資源管控優(yōu)勢,如何設(shè)計(jì)有效的管控拓?fù)淠P蛢?yōu)選算法,實(shí)現(xiàn)對探測資源的高效管控是當(dāng)前待解的難題。從目前國內(nèi)外公開的研究成果來看(或許由于保密原因),關(guān)于探測資源管控拓?fù)淠P腿绾蝺?yōu)選多是憑經(jīng)驗(yàn)主觀判斷,缺乏客觀和科學(xué)的選擇依據(jù),并且與之相關(guān)的學(xué)術(shù)成果[3-5]多是定性角度進(jìn)行研究,缺少具體的量化分析。Mahendra等[6]從任務(wù)調(diào)度與分配的角度,系統(tǒng)總結(jié)了資源管控的基本問題和方法,知識(shí)涵蓋了多個(gè)領(lǐng)域;而借鑒復(fù)雜網(wǎng)絡(luò)的計(jì)算方法用于解決武器裝備體系應(yīng)用的問題出現(xiàn)在了Guariniello等[7]的研究成果中,具有一定的科學(xué)性和啟發(fā)性;Iliev等[8]討論了無線傳感器網(wǎng)節(jié)點(diǎn)的覆蓋控制問題,涉及了多種節(jié)點(diǎn)定位方法,為節(jié)點(diǎn)控制問題提供了新的研究途徑。上述研究跨越了多個(gè)學(xué)科的多種領(lǐng)域,能夠從某一方法的角度較好地解決相關(guān)的問題,但是針對探測資源管控拓?fù)淠P蛢?yōu)選難題,傳統(tǒng)的經(jīng)驗(yàn)主觀選擇方法已難以滿足雷達(dá)組網(wǎng)系統(tǒng)決策者對科學(xué)性和客觀性的需要。因此,本文試圖通過研究探測資源管控拓?fù)淠P吞攸c(diǎn),利用圖論[9]和社會(huì)網(wǎng)絡(luò)分析[10]的方法對探測資源管控特性進(jìn)行形式化表示,建立了管控信息流圖論模型和優(yōu)選算法流程,提出了探測資源管控拓?fù)淠P蛢?yōu)選的新算法,與主觀選擇法相比,更具有客觀和可操作性,適用于拓?fù)淠P蛢?yōu)選。借助優(yōu)選示例進(jìn)行了仿真計(jì)算,得出具有參考價(jià)值的結(jié)論,為雷達(dá)組網(wǎng)系統(tǒng)決策者提供重要的借鑒。
1 算法理論基礎(chǔ)
1.1 探測資源管控節(jié)點(diǎn)的結(jié)構(gòu)特征
美國A2C2(Adaptive Architectures for Command and Control)[11]項(xiàng)目的核心技術(shù)之一就是團(tuán)隊(duì)集成設(shè)計(jì)環(huán)境(Team Integrate Design Environment,TIDE)。它將組織結(jié)構(gòu)理論和系統(tǒng)工程方法有效地融入到了團(tuán)隊(duì)設(shè)計(jì)環(huán)境中。合弄制造系統(tǒng)(Holon Manufacturing System,HMS)中的Holon技術(shù)優(yōu)勢是:Holon體之間的協(xié)作以及對自身內(nèi)部資源的有效管理[12]。將TIDE與Holon相結(jié)合構(gòu)建的團(tuán)隊(duì)合弄集成設(shè)計(jì)環(huán)境(Team Holon Integrate Design Environment,THIDE),可以綜合TIDE的團(tuán)隊(duì)優(yōu)化配置成果和Holon技術(shù)的優(yōu)勢。圖1給出了基于THIDE的探測資源管控節(jié)點(diǎn)內(nèi)部結(jié)構(gòu),該管控節(jié)點(diǎn)既可以是受控雷達(dá),也可以是嵌入到雷達(dá)中的功能模塊或者平臺(tái)。通過團(tuán)隊(duì)目標(biāo)到管控任務(wù)的分析,并對多變量參數(shù)約束的目標(biāo)函數(shù)進(jìn)行求解,得到優(yōu)化的結(jié)構(gòu)解,進(jìn)行團(tuán)隊(duì)的優(yōu)化配置,再與Holon技術(shù)優(yōu)勢的交互,使得管控效率得到提升。

圖1 基于THIDE的探測資源管控節(jié)點(diǎn)內(nèi)部結(jié)構(gòu)
1.2 基于THIDE和圖論的探測資源管控拓?fù)淠P?/h3>
面對復(fù)雜多變的信息對抗環(huán)境,需要構(gòu)建多樣化、實(shí)用性較強(qiáng)和可選擇的基于網(wǎng)絡(luò)體系結(jié)構(gòu)的探測資源管控拓?fù)淠P汀D2給出了基于THIDE和圖論的雷達(dá)組網(wǎng)探測資源管控信息流程示意圖,其中實(shí)線箭頭為探測資源管控指令信息流,虛線箭頭為探測資源管控指令反饋信息流。

圖2 基于THIDE和圖論的探測資源管控拓?fù)淠P褪纠龍D
2 算法模型
2.1 算法流程
優(yōu)選算法中引入模糊物元[13]分析法,它是對管控拓?fù)淠P蛢?yōu)選量化模型中不確定特征定量分析的一種獨(dú)特?cái)?shù)學(xué)工具,并對其進(jìn)行改進(jìn),以此解決管控活動(dòng)中信息的可變性,算法流程如圖3所示。
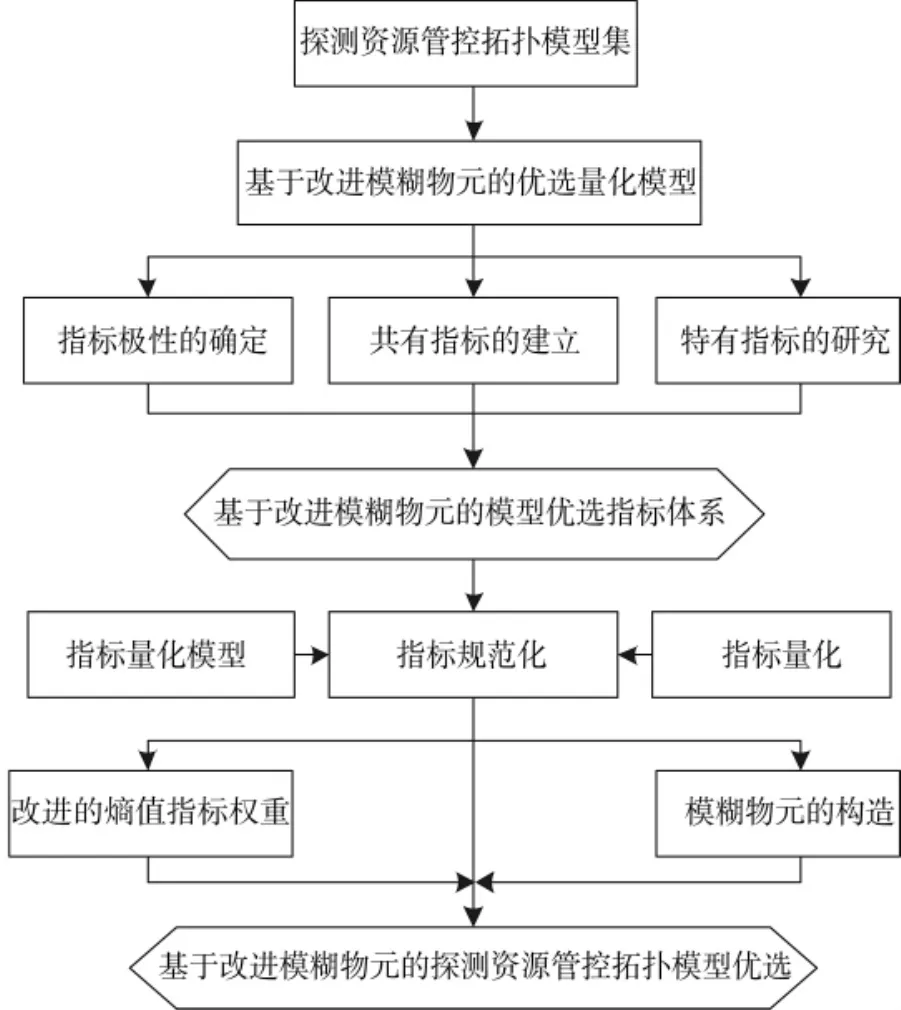
圖3 基于改進(jìn)模糊物元的拓?fù)淠P蛢?yōu)選算法流程圖
2.2 節(jié)點(diǎn)特性指標(biāo)量化模型
通過圖論可知,探測資源管控拓?fù)渚W(wǎng)絡(luò)是由管控THIDE節(jié)點(diǎn)集J和邊集B組成的圖G=(J,B),為了方便討論,本文的管控THIDE節(jié)點(diǎn)是指嵌入了THIDE功能模塊的單部雷達(dá),不具體區(qū)分各管控THIDE節(jié)點(diǎn)的個(gè)體差異,且不考慮自環(huán)的情況。借鑒社會(huì)網(wǎng)絡(luò)分析方法[10],指標(biāo)含義及量化模型如下:
2.2.1 探測資源管控信息可用度T1
其含義是表示在某個(gè)管控活動(dòng)中,雷達(dá)i對管控信息的利用和反饋程度。借鑒網(wǎng)絡(luò)流通度量方法[14],其計(jì)算模型為:

其中,R(i)為雷達(dá) i的聚焦系數(shù)[15]。
2.2.2 探測資源協(xié)同貢獻(xiàn)度T2
探測資源協(xié)同貢獻(xiàn)度是度量管控拓?fù)渚W(wǎng)絡(luò)中雷達(dá)i為達(dá)到協(xié)同探測效果通過各種關(guān)系與其他雷達(dá)節(jié)點(diǎn)協(xié)同探測的貢獻(xiàn)量。記雷達(dá)i的探測資源協(xié)同貢獻(xiàn)度為,其計(jì)算公式為:

其中,n為管控網(wǎng)絡(luò)的雷達(dá)總數(shù)。lij為雷達(dá)i到j(luò)的管控捷徑,這里用捷徑矩陣中的元素作為其度量值。bij為雷達(dá)i與j構(gòu)成的相互關(guān)系,用鄰接矩陣[16]中的元素作為其度量值。
2.2.3 探測威力信息貢獻(xiàn)度T3
雷達(dá)探測威力貢獻(xiàn)度就是賦予每部雷達(dá)一定的探測威力信息“核心度”,可理解為兩部雷達(dá)協(xié)同探測過程中交換的探測威力信息是關(guān)于二者與管控信息核心的接近性程度。在本文中采用連續(xù)核心邊緣分析模型[17]。
確定核心度?i的模型為:

其中,P為皮爾森相關(guān)系數(shù),αij表示的是雷達(dá)i和j的協(xié)同探測關(guān)系是否存在,存在取值為1,否則為0,n為雷達(dá)總數(shù)。
2.2.4 探測資源管控關(guān)系強(qiáng)度T4
探測資源管控關(guān)系強(qiáng)度是度量雷達(dá)i在充當(dāng)中介角色的可能。考慮管控信息的復(fù)雜性,故其計(jì)算模型為:

2.2.5 信息中心度T5
其含義是表示在某個(gè)管控活動(dòng)中將該受控雷達(dá)i置于休眠狀態(tài)時(shí)引起的雪崩效應(yīng)[19],記為,其表達(dá)式如下:

其中,E(g)和 E(G)的含義及量化見文獻(xiàn)[20]。
2.2.6 特征向量中心度T6
進(jìn)行特征向量中心度[21]研究是為了找到最有力量倍增效果的雷達(dá),量化分析如下:
令A(yù)為鄰接矩陣,其元素aij的含義是雷達(dá)i對j的信息互補(bǔ)效果,令中心度值向量為:

那么特征向量中心性模型可表達(dá)為:


其中,xi為雷達(dá)i所對應(yīng)的特征向量的分量。
2.2.7 探測資源管控優(yōu)勢T7
探測資源管控優(yōu)勢是衡量雷達(dá)i的探測信息影響范圍大小的指標(biāo),度數(shù)中心度[22]越高者,表示其在管控網(wǎng)絡(luò)中與較多的組網(wǎng)雷達(dá)節(jié)點(diǎn)構(gòu)成信息相互印證的關(guān)系,其表達(dá)式如下:

其中,d(i)為雷達(dá) i的度數(shù)[23],n 為雷達(dá)總數(shù)。雷達(dá) i的探測資源管控優(yōu)勢采用相對度數(shù)中心度模型進(jìn)行度量,計(jì)算公式如下:

2.2.8 探測信息集成度T8
“相鄰”是對兩部雷達(dá)節(jié)點(diǎn)協(xié)同控制的圖論表達(dá),點(diǎn)i的鄰點(diǎn)個(gè)數(shù)稱為該點(diǎn)的度數(shù),也叫關(guān)聯(lián)度[23],表示對管控網(wǎng)絡(luò)中所有“鄰點(diǎn)”雷達(dá)的管控信息融合程度,即為雷達(dá)i的探測信息集成度指標(biāo),記作d(i),其計(jì)算模型為:

其中,ni為雷達(dá)i的鄰點(diǎn)個(gè)數(shù)。
由以上各指標(biāo)含義分析可知,除信息中心度指標(biāo)為極小值極性外,其余指標(biāo)均為極大值極性。本文所提指標(biāo)可針對具體應(yīng)用的需要適當(dāng)?shù)剡M(jìn)行調(diào)整和擴(kuò)充。
2.3 管控勢能模型
雷達(dá)組網(wǎng)探測資源管控勢能是指在特定的管控拓?fù)淠P椭校坎坷走_(dá)按照體系探測任務(wù),利用信息進(jìn)行協(xié)同管控,以融合為該拓?fù)淠P偷恼w管控優(yōu)勢。信息是信息論[24]中的核心,同時(shí)也是雷達(dá)組網(wǎng)系統(tǒng)工作的驅(qū)動(dòng)力;為了消除管控活動(dòng)中存在的大量隨機(jī)性和不確定性,使信息優(yōu)勢轉(zhuǎn)化為管控優(yōu)勢,建立信息論和模糊物元分析法相結(jié)合的優(yōu)選算法是合理的,這也是本文算法設(shè)計(jì)的依據(jù)。
2.3.1 管控信息熵模型的建立
設(shè)管控拓?fù)淠P椭邢嗷オ?dú)立的狀態(tài)變量向量為:

其相應(yīng)的概率向量為:


由于每一狀態(tài)ti的概率不盡相同,所以自信息量也不相同,以此來計(jì)算該管控拓?fù)淠P椭懈骼走_(dá)節(jié)點(diǎn)管控信息具有不確定性數(shù)量的數(shù)學(xué)期望,記為,表達(dá)式如下:

2.3.2 管控信息熵模糊物元的定義
在管控拓?fù)渚W(wǎng)絡(luò)中所描述的雷達(dá)節(jié)點(diǎn)G及其特征T和量值Z組成物元F=(G,T,Z),如果物元模型中的量值Z具有模糊性,便稱其為模糊物元。如果模糊物元中節(jié)點(diǎn)的特征為管控信息熵,則稱為管控信息熵模糊物元。若管控信息熵模糊物元中有m個(gè)節(jié)點(diǎn),則為m個(gè)節(jié)點(diǎn)的復(fù)合信息熵模糊物元。
2.3.3 各類物元的構(gòu)造

m個(gè)節(jié)點(diǎn)的n維物元組合在一起便構(gòu)成m個(gè)節(jié)點(diǎn)的n維復(fù)合物元R,記為:

其中,Gj為第個(gè)節(jié)點(diǎn);Ti為第個(gè)特征;zij為第j個(gè)節(jié)點(diǎn)的第i個(gè)特征量值。
為了更充分地反映各指標(biāo)的極性和相對性,采用如下形式計(jì)算各指標(biāo)模糊從優(yōu)隸屬度:
1)極大值極性指標(biāo):

2)極小值極性指標(biāo):

其中,ξij為從優(yōu)隸屬度;分別為同一指標(biāo)下各特征量值中的最大值和最小值。由此可以構(gòu)建從優(yōu)隸屬度模糊物元Q:

2.3.4 指標(biāo)權(quán)重的確定
在指標(biāo)賦權(quán)時(shí),多采用層次分析法[25]的主觀定權(quán)法,但易造成主觀因素的偏差。為了消除這種偏差,使優(yōu)選結(jié)果更符合實(shí)際,可選用滿足客觀性要求的熵權(quán)法[26],其計(jì)算步驟如下:
1)將R作為判斷矩陣。
2)將判斷矩陣中的量值zij作如下歸一化處理:

其中,ηij為歸一化量值;分別為同一指標(biāo)下各雷達(dá)節(jié)點(diǎn)量值中的最大值和最小值。
3)根據(jù)熵的定義,m部雷達(dá)的n個(gè)指標(biāo),可以確定第i個(gè)指標(biāo)的熵為:
為使 lnσij有意義,需定義σij為:


其中,第i個(gè)指標(biāo)的熵權(quán)為:

2.3.5 復(fù)合模糊物元的構(gòu)造
由上述計(jì)算模型便可構(gòu)造優(yōu)選時(shí)第j個(gè)節(jié)點(diǎn)的概率復(fù)合模糊物元和自信息量復(fù)合模糊物元,分別用Fj和Yj表示,則有:

其中,

2.3.6 管控勢能模型的建立

設(shè)管控勢能中含有的不確定性加權(quán)自信息總量為Ic,該管控拓?fù)淠P偷墓芸貏菽転镋c,且Ec的值介于0和1之間;則管控勢能中含有的不確定性即為整個(gè)管控拓?fù)淠P蛶淼牟淮_定性加權(quán)自信息總量,即:

所以管控拓?fù)淠P偷墓芸貏菽転椋?/p>

其中,wj為第j個(gè)雷達(dá)節(jié)點(diǎn)的權(quán)重。
3 算法驗(yàn)證
現(xiàn)用3種管控拓?fù)淠P停?、2和3)的示例對本文優(yōu)選算法進(jìn)行驗(yàn)證。依據(jù)上級(jí)賦予的3個(gè)階段(A、B和C)體系抗干擾任務(wù),對分別嵌入THIDE功能模塊的7部可機(jī)動(dòng)雷達(dá)(對應(yīng)為THIDE1,THIDE2,…,THIDE7)進(jìn)行分布式組網(wǎng),雷達(dá)組網(wǎng)系統(tǒng)決策者預(yù)先構(gòu)建了3個(gè)階段相應(yīng)的探測資源管控拓?fù)淠P汀kA段A、B和C分別對應(yīng)拓?fù)淠P?、2和3。通過考核各階段對應(yīng)拓?fù)淠P凸芸貏菽艿拇笮磉M(jìn)行動(dòng)態(tài)適時(shí)決策。為便于理解和計(jì)算,建立了各拓?fù)淠P偷膱D論模型,如下頁圖4所示。
現(xiàn)結(jié)合示例和2.2節(jié),對以上各拓?fù)淠P偷墓?jié)點(diǎn)特性指標(biāo)進(jìn)行具體量化。由圖4圖論模型,并借助MATLAB和UCINET仿真軟件求得各拓?fù)淠P偷墓?jié)點(diǎn)指標(biāo)量化矩陣如表1所示,量化值客觀地反映了3種拓?fù)淠P椭懈鱐HIDE節(jié)點(diǎn)的不同特性指標(biāo)值的大小,為模型優(yōu)選的下一步計(jì)算提供科學(xué)和可靠的數(shù)據(jù)支持。

圖4 3種管控拓?fù)淠P偷男畔⒘鲌D論模型
在求得管控拓?fù)淠P椭械母鱾€(gè)節(jié)點(diǎn)諸指標(biāo)特性值的基礎(chǔ)上,結(jié)合指標(biāo)極性的特點(diǎn),通過MATLAB仿真計(jì)算,得出3種拓?fù)淠P椭泄芸豑HIDE節(jié)點(diǎn)相應(yīng)的不確定性加權(quán)自信息總量并加以對比,如下頁圖5所示。由圖5可見,拓?fù)淠P?的不確定性加權(quán)自信息總量曲線相對其他兩種模型的較平緩,拓?fù)淠P?的則起伏較大;隨著網(wǎng)絡(luò)由拓?fù)淠P?動(dòng)態(tài)變化到3,節(jié)點(diǎn)4的不確定性加權(quán)自信息總量逐步減少。仿真表明:由于網(wǎng)絡(luò)動(dòng)態(tài)變化中各THIDE節(jié)點(diǎn)之間連接關(guān)系的增加,使得節(jié)點(diǎn)間通過信息的溝通來合理平衡網(wǎng)絡(luò)中各節(jié)點(diǎn)之間不確定性加權(quán)自信息總量,達(dá)成協(xié)同管控的效果。

圖5 3種管控拓?fù)淠P椭懈鞴?jié)點(diǎn)的不確定信息量
結(jié)合2.3.6中管控勢能計(jì)算模型,經(jīng)仿真計(jì)算得出3種管控拓?fù)淠P偷募訖?quán)不確定信息總量和最終的管控勢能比較結(jié)果(如表2)。由表2可見,隨著網(wǎng)絡(luò)由拓?fù)淠P?動(dòng)態(tài)變化到3,各節(jié)點(diǎn)之間的連接關(guān)系增加,使得網(wǎng)絡(luò)整體的加權(quán)不確定信息總量逐步減少;隨著任務(wù)的進(jìn)行,各節(jié)點(diǎn)之間橫向和縱向的聯(lián)系增加,生成了基于網(wǎng)絡(luò)體系結(jié)構(gòu)的管控能力,促使拓?fù)淠P偷墓芸貏菽茉黾樱瑢⒐芸貏菽艿母叩妥鳛橥負(fù)淠P蛢?yōu)劣選擇的依據(jù),由表2可以得出拓?fù)淠P?是優(yōu)選的結(jié)果,這與實(shí)際情況也是相吻合的;因此,本文優(yōu)選算法是合理的。

表2 3種拓?fù)淠P偷墓芸貏菽芊抡娼Y(jié)果對比
為了驗(yàn)證本文算法的有效性,用文獻(xiàn)[27-28]的算法分別對上述示例進(jìn)行求解,并將所得的拓?fù)淠P蛢?yōu)選量值與本文算法結(jié)果進(jìn)行對比,如圖6所示。3種算法的優(yōu)選量值高低依次是拓?fù)淠P?、2和1,雖然3種算法衡量的角度差異導(dǎo)致了值的大小差異,但是各算法優(yōu)選排序結(jié)果是一致的;因此,本文算法的有效性得以驗(yàn)證。綜合表2的結(jié)果分析,說明本文算法是可行的。

圖6 3種算法仿真結(jié)果對比
4 結(jié)論
本文提出的優(yōu)選新算法,將圖論、社會(huì)網(wǎng)絡(luò)分析法、信息論與物元分析方法有機(jī)結(jié)合,通過階段變化時(shí)網(wǎng)絡(luò)結(jié)構(gòu)的動(dòng)態(tài)拓?fù)淠P褪纠瑢λ惴ǖ挠行赃M(jìn)行了驗(yàn)證。研究與仿真表明,雷達(dá)組網(wǎng)系統(tǒng)決策者通過在管控拓?fù)淠P椭薪⒐芸豑HIDE節(jié)點(diǎn)之間較多的橫向和縱向關(guān)系,來達(dá)成基于網(wǎng)絡(luò)體系結(jié)構(gòu)的顯著特征,能夠提高該拓?fù)淠P偷墓芸貏菽埽^而將管控勢能轉(zhuǎn)化為管控優(yōu)勢,為雷達(dá)組網(wǎng)探測效能的提升提供優(yōu)選的管控拓?fù)淠P汀K惴ㄟm用于進(jìn)行組網(wǎng)探測資源管控拓?fù)淠P蛢?yōu)選和網(wǎng)絡(luò)動(dòng)態(tài)變化時(shí)的發(fā)展規(guī)律量化分析,可解決雷達(dá)組網(wǎng)探測資源管控拓?fù)淠P蛢?yōu)選的問題。然而,拓?fù)淠P蛢?yōu)選指標(biāo)在其他具體應(yīng)用中如何合理調(diào)整,還需要進(jìn)一步研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
吉林廣播電視大學(xué)學(xué)報(bào)(2021年4期)2022-01-14 02:35:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
作文成功之路·小學(xué)版(2020年5期)2020-06-11 12:48:26
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小天使·一年級(jí)語數(shù)英綜合(2018年11期)2018-11-23 09:47:26
中華手工(2017年2期)2017-06-06 23:00:31
資源再生(2017年3期)2017-06-01 12:20:59
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中外會(huì)展(2014年4期)2014-11-27 07:46:46
