各有一個線性項的兩個新的混沌系統及其異結構同步
2019-04-22 09:13:00鮮永菊徐昌彪
振動與沖擊 2019年7期
鮮永菊, 夏 誠, 鐘 德, 徐昌彪
(1. 重慶郵電大學 通信與信息工程學院, 重慶 400065; 2. 重慶郵電大學 光電工程學院, 重慶 400065)
混沌理論的研究和應用在許多領域[1-5]得到了極大的關注。自Lorenz于1963年發現第一個混沌吸引子[6]以來,許多學者提出了各種新型混沌系統,如Chen系統[7],Lü系統[8],Liu系統[9]等。大多數混沌系統屬于非線性系統,且具有非零特征根的不穩定平衡點,但仍有許多特殊的系統存在。文獻[10]報告了一個沒有平衡點的系統。Yang等發現了一個只有兩個穩定節點的類Lorenz混沌系統[11],同時還發現了一個具有一個鞍點和兩個穩定焦節點的混沌系統[12]。孫常春等[13]提出了一個具有無窮平衡點的三維混沌系統。這些系統的發現促進了人們對混沌現象更深入的認識,進一步豐富和完善了混沌理論。
在混沌理論的研究中,另一個重要的研究課題是混沌同步。在實際同步中,由于各種原因很難保證兩個系統能完全相同,尤其是混沌同步技術在保密通信中的應用。因為通信系統的發送端和接收端不同,而采用不同的混沌系統將會提高通信系統的安全性。因此,如何設計異結構同步控制器,使得系統能夠實現穩定的同步,并將異結構同步控制技術應用到保密通信中增加保密安全性,將更加具有現實意義。羅小華等[14]采用異結構自適應同步控制實現了Liu系統和Rǒssler系統的異結構同步,兩個系統分別屬于廣義Lorenz系統族和廣義Chen系統族。李建平等[15]構造主動控制器實現了Lorenz混沌系統和Qi混沌系統的異結構同步,兩個系統均屬于廣義Lorenz系統。于娜等[16]利用Lyapunov直接法在響應系統中構造非線性函數,實現了Lorenz系統和Chen系統的異結構同步。本文采用主動控制同步法對兩個新系統實現異結構同步,兩個系統均屬于廣義Lü系統族。
基于以上研究,本文構建了兩個只有一個線性項的新型混沌系統,它們均有線平衡,且都為不穩定平衡點。此外,該組混沌系統中的拓撲馬蹄和拓撲熵也通過拓撲馬蹄理論和數值計算進行了討論。基于條件Lyapunov穩定性理論,采用主動控制同步法實現了兩個新混沌系統的異結構同步。數值仿真和理論分析驗證了所設計控制器的有效性。
1 系統模型及其基本特性
系統(1)的數學模型為:
(1)
系統(2)的數學模型為:
(2)
式中:x,y,z為系統變量;ax和az為實常數。
1.1 系統(1)的特性分析
取參數az=-0.3,初始值為[2,2,2] ,系統(1)存在一個典型的吸引子,如圖1所示。此時三個Lyapunov指數為L1=0.148,L2=0.001,L3=-2.168,其Lyapunov維數為DL=2.070,顯然系統(1)處于混沌態。

(a) x-y

(b) x-z

(c) y-z圖1 系統(1)的相圖Fig.1 Phase diagram of system (1)
1) 平衡點及穩定性
令式(1)的左邊等于0,得:
(3)
取az=-0.3時,系統(1)的平衡點為:
S0=(0,y*,0)(y*∈R),
S1= (0.381,-0.155,0.184),
S2= (-0.381,0.225,-0.184)。
其中S0=(0,y*,0)(y*∈R)為線平衡。
線性化系統(1),得其Jacobi矩陣為:
在S0處,特征根為λ1=λ2=0,λ3=-0.3,則S0不穩定;在S1處,特征根為λ1=-0.474,λ2=0.105,λ3=0.437,則S1為不穩定的鞍點;在S2處,特征根為λ1=-0.165+0.192i,λ2=-0.165-0.192i,λ3=-0.338,則S2為穩定平衡點。
2) Lyapunov指數和分岔圖
采用Jacobi矩陣方法得Lyapunov指數譜,如圖2所示。系統變量z隨系統參數az變化的分岔圖,如圖3所示。可知系統通向混沌的道路為倍周期分岔道路。

圖2 系統(1)的Lyapunov指數譜Fig.2 Lyapunov exponent spectrum of system (1)

圖3 系統(1)的分岔圖Fig.3 Bifurcation diagram of system (1)
1.2 系統(2)的特性分析
取參數ax=-2,初始值為[2,2,2] ,系統(2)存在一個典型的吸引子,如圖4所示。此時三個Lyapunov指數為L1=0.632,L2=-0.001,L3=-24.733,其Lyapunov維數為DL=2.026,顯然系統(2)處于混沌態。

(a) x-y

(b) x-z
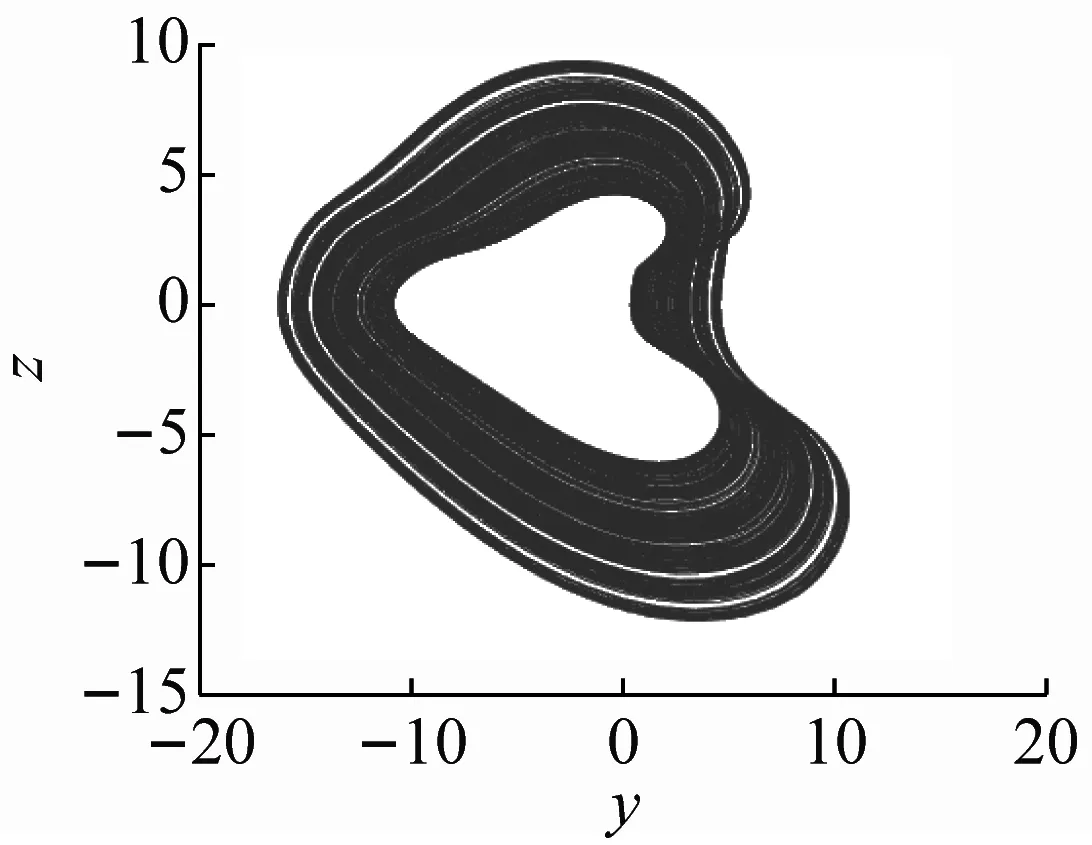
(c) y-z圖4 系統(2)的相圖Fig.4 Phase diagram of system (2)
1) 平衡點及穩定性
令式(2)的左邊等于0,得:
(4)
取ax=-2時,系統(2)的平衡點為:
S0=(0,y*,0)(y*∈R),
S1=(2.219,0.901,2.219)。
其中S0=(0,y*,0)(y*∈R)為線平衡。
線性化系統(2),得其Jacobi矩陣為:
在S0處,特征根為λ1=λ2=λ3=0;在S1處,特征根為λ1=3.634+4.478i,λ2=3.634-4.478i,λ3=-15.381。可知平衡點都是不穩定點。
2) Lyapunov指數和分岔圖
采用Jacobi矩陣方法得Lyapunov指數譜,如圖5所示。系統變量z隨系統參數ax變化的分岔圖,如圖6所示。可知分岔圖呈倒分岔,即系統通向混沌的道路為倍周期分岔道路。
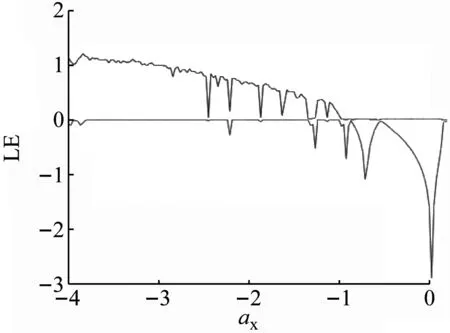
圖5 系統(2)的Lyapunov指數譜Fig.5 Lyapunov exponent spectrum of system (2)

圖6 系統(2)的分岔圖Fig.6 Bifurcation diagram of system (2)
2 新系統中的拓撲馬蹄與拓撲熵
令Z為度量空間,D是Z緊子集,H:D→Z是一個滿足存在D的m個互不相交的連通子集[D1,D2,…,Dm],且對于每個Di都有H|Di連續。



推論1[17-19]如果Hm(D1)|→D1,Hm(D1)|→D2,Hn(D2)|→D1且Hn(D2)|→D2,那么存在一個緊不變子集K?D,使Hm+n|K半共軛于2位移映射,并且拓撲熵為ent(H)≥1/(m+n)log 2。
例1系統(1)的拓撲馬蹄與拓撲熵
取az=-0.3,初始條件為[2,2,2]。選取的Poincare截面為:
Π={(x,y,z)|z=0}
定義Poincare映射P:Π→Π為:對每個(x,y,0)∈Π,P(x,y,0)是系統(1)在初始條件(x,y,0)的流下的第一回歸映射。經過多次嘗試,找到了一個拓撲馬蹄,如圖7所示,其馬蹄映射,如圖8所示。

圖7 系統(1)的拓撲馬蹄Fig.7 Topological horseshoe of system (1)
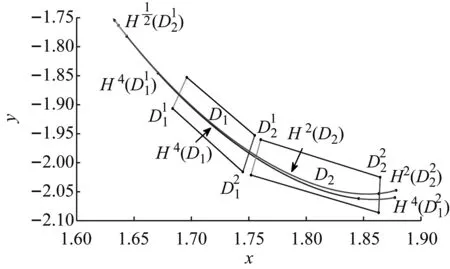
圖8 系統(1)的馬蹄映射Fig.8 Horseshoe map of system (1)
其中D1的四個頂點坐標為:
(1.695957249,-1.852777778)
(1.683596654,-1.906481481)
(1.744749071,-2.015740741)
(1.755157993,-1.952777778)
D2的四個頂點坐標為:
(1.760362454,-1.960185185)
(1.751905204,-2.021296296)
(1.863150558,-2.086111111)
(1.864451673,-2.025000000)
數值計算表明,H下的兩個子集D1和D2連續。由圖7和圖8可以看出:H4(D1)|→D1,H4(D1)|→D2,H2(D2)|→D1,H2(D2)|→D2。根據推論1可知,系統的一次回歸Poincare映射與一個2移位映射拓撲半共軛,其拓撲熵為ent(H)≥1/6log 2。因為拓撲熵為正,表明系統(1)是混沌的。
例2系統(2)的拓撲馬蹄與拓撲熵
取ax=-2,初始條件為[2,2,2]。選取的Poincare截面為:
Π={(x,y,z)|z=0}
定義Poincare映射P:Π→Π為:對每個(x,y,0)∈Π,P(x,y,0)是系統(2)在初始條件(x,y,0)的流下的第一回歸映射。經過多次嘗試,找到了一個拓撲馬蹄,如圖9所示,其馬蹄映射如圖10所示。
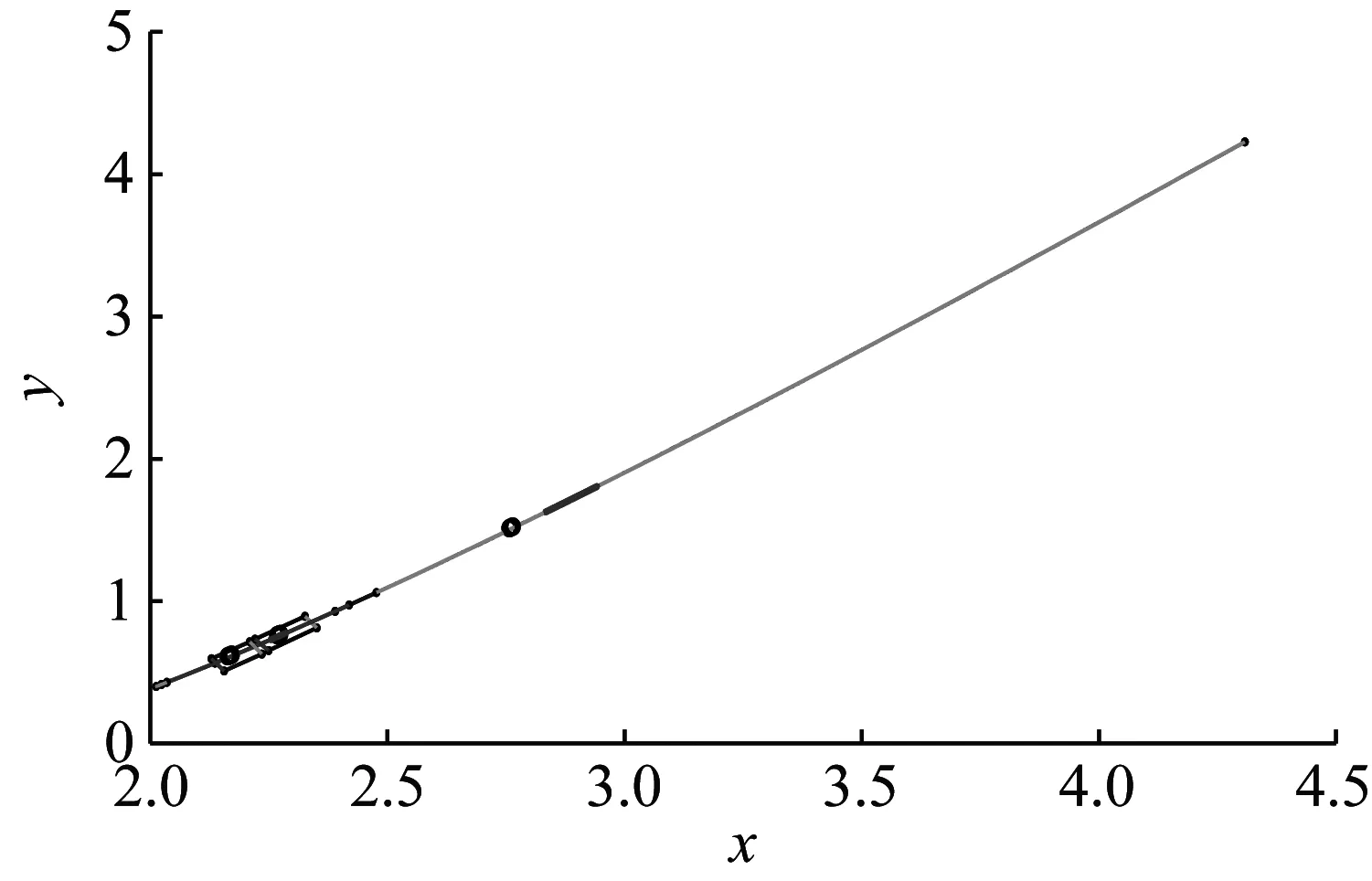
圖9 系統(2)的拓撲馬蹄Fig.9 Topological horseshoe of system (2)

圖10 系統(2)的馬蹄映射Fig.10 Horseshoe map of system (2)
其中D1的四個頂點坐標為:
(2.325840232,0.893711420)
(2.350715510,0.811921296)
(2.249348751,0.652970679)
(2.220742182,0.733217593)
D2的四個頂點坐標為:
(2.209548306,0.714699074)
(2.235045466,0.628279321)
(2.155444576,0.509452160)
(2.128703653,0.595871914)
數值計算表明,H下的兩個子集D1和D2連續。由圖9和圖10可以看出:H2(D1)|→D1,H2(D1)|→D2,H2(D2)|→D1,H2(D2)|→D2。根據推論1可知,系統的一次回歸Poincare映射與一個2移位映射拓撲半共軛,其拓撲熵為ent(H)≥1/4log 2。因為拓撲熵為正,表明系統(2)是混沌的。
3 混沌系統的異結構同步
采用條件Lyapunov控制方法使系統(1)和系統(2)達到混沌同步。取驅動系統為:
(5)
其中x1,x2,x3為系統變量。
響應系統為:
(6)
其中y1,y2,y3為系統變量,u1,u2,u3為控制器。

設計控制器為:
(7)
其中k為正的增益常數。
系統的同步誤差為:
(8)
采用四階Runge-Kutta(ODE45)算法進行數值仿真。令驅動系統的初值為x1(0)=2,x2(0)=2,x3(0)=2;響應系統的初值為y1(0)=1,y2(0)=2,y3(0)=3。
同步誤差系統的Lyapunov指數譜如圖11所示。當k∈[0,0.35)時,同步誤差系統的LE1>0,誤差系統表現為非穩定狀態;當k∈[0.35,5]時,同步誤差系統表現為穩定不動點。k=0.35時,其條件Lyapunov指數分別為L1=-0.040,L2=-1.839,L3=-12.470,同步誤差e1,e2,e3的曲線如圖12所示,顯然驅動系統和響應系統達到了穩定同步。即當k≥0.35時,系統的同步誤差穩定到原點,即驅動系統和響應系統實現了混沌同步。

圖11 同步誤差系統的Lyapunov指數譜Fig.11 Lyapunov exponent spectrum of the synchronization error system

圖12 同步誤差e1,e2,e3Fig.12 Synchronization errors of e1,e2 and e3
4 結 論
本文提出了兩個均有線平衡和各有一個線性項的混沌系統,對該系統的數學性質進行了研究,給出了系統的相圖、Lyapunov指數譜和分岔圖。借助拓撲馬蹄和數值計算,得到了兩個系統的拓撲馬蹄,其拓撲熵分別為ent(f)≥1/6log 2和ent(f)≥1/4log 2。基于條件Lyapunov穩定性理論,采用主動控制同步法,設計了一個簡單的同步控制器,以實現兩個系統的異結構同步。理論分析和數值仿真結果表明,所設計控制器是有效的。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
哲學評論(2021年2期)2021-08-22 01:53:34
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
中華詩詞(2019年7期)2019-11-25 01:43:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
