雙圓柱體低速并聯入水過程空泡及運動特性試驗研究
2019-04-22 09:13:00路麗睿魏英杰宋武超劉凱航
振動與沖擊 2019年7期
路麗睿, 魏英杰, 王 聰, 宋武超, 劉凱航
(哈爾濱工業大學 航天學院, 哈爾濱 150001)
空投魚雷、超空泡射彈等跨介質打擊型武器在攻擊水下目標時,都要經歷從空氣介質進入水介質的過渡過程,在該運動過程中,運動體經歷了入水撞擊、空泡形成及演化、全沾濕航行三個階段。由于氣體和液體兩種介質在密度、黏度、可壓縮性等流體性質上存在差異,使得該過程對運動體水下運動穩定性具有重要意義。
18世紀末Worthington等[1-2]運用當時出現的閃光攝影技術研究了不同球體入水過程產生的物理現象,首次對入水噴濺和入水空泡開展了研究。Malock[3]進一步開展了運動體入水試驗,定性分析了球體速度及相對密度對球體入水過程中所產生的空泡的形成和演化、噴濺的影響規律。May等[4-6]針對小型回轉體入水運動開展試驗研究,獲得了運動體入水過程彈道特性和阻力系數。施紅輝等[7-9]針對細長體在48~53 m/s速度范圍內的入水問題開展試驗研究,分析了細長體頭型等因素對入水空泡生成和發展變化及自由液面波動特性的影響規律。宋武超等[10]針對回轉體傾斜入水開展了相關實驗研究,分析了入水速度、入水角度對入水空泡、回轉體速度、俯仰及阻力系數的影響規律。方城林等[11]開展了不同頭型射彈垂直入水的數值研究,分析了頭型對空泡形態演化過程、射彈流體動力及彈道特性的影響規律。楊衡等[12]開展了圓柱體低速入水空泡實驗研究,分析了入水速度和入水角度對空泡形態及入水噴濺的影響規律。梅哲力等[13]研究了入水角度對細長圓柱體入水過程中空泡形態及阻力系數的影響規律。路中磊等[14]針對開放空腔殼體入水過程開展了相關研究,并分析了空泡波動與云化的內在機理。孫釗等[15]針對表面潤濕性對入水空泡形態的影響開展了數值研究,并分析了半疏水半親水球體入水后空泡形態非對稱特性對運動軌跡的影響規律。
對于并聯入水,僅何春濤等[16]開展了圓柱體低速并聯入水過程的探索試驗,且僅初步分析了空泡演化的非對稱現象,并未對其中規律及機理開展深入研究。然而隨著水下打擊武器及跨介質武器地位的日益凸顯,多武器協同打擊成為必然發展趨勢,深入研究多運動體并聯入水流場及彈道特性意義重大。本文基于雙圓柱體低速并聯入水試驗,開展入水空泡特性與運動特性研究,分析入水雙空泡演化機理,研究不同入水速度及空泡演化對圓柱體運動特性的影響規律。
1 試驗系統與模型參數
本文試驗系統由試驗水槽、光學測試系統和釋放機構三部分組成,如圖1所示。試驗水槽采用 尺寸為300 mm×300 mm×900 mm 的小型水槽,水槽四壁為鋼化玻璃,壁厚 10 mm,槽底墊有緩沖橡膠墊,防止射彈入水對缸體造成破壞。試驗光源采用 4 盞 LED 作為背景光,并用柔光屏對背景光進行柔化,使背景光均勻撒布,以達到良好的拍照效果;采用 2 盞 LED 燈作為頂光,以增強空泡內部光照條件,進而增強圓柱體邊界清晰度,便于圖片數據的后期處理。圓柱體運動過程通過 Photron FASTCAM SA-X 型高速攝像機采集,并通過自編程序對運動軌跡及運動姿態進行提取,以獲得圓柱體運動特性。相機采集幀率為 2 000 fps,相機上安裝廣角鏡頭,以擴大視野,捕捉更多運動信息。

圖1 試驗系統示意圖Fig.1 Experiment system of water-entry
釋放機構由推拉式電磁鐵和豎直導軌組成,如圖2所示。其中豎直導軌起導向作用,以確保試驗模型入水時保持豎直姿態;推拉式電磁鐵通過觸發開關控制,共用同一個電信號,以確保觸發的同步性。當電源接通時,電磁鐵推拉桿同時收縮,釋放模型。為防止電磁鐵收縮引起的支架振動對釋放產生影響,導軌和電磁鐵分別安裝在不同的支架上,導軌支架和電磁鐵支架相互獨立。
試驗模型如圖3所示。模型直徑D=10 mm,長L=60 mm,模型采用6063鋁合金加工,密度為 2.7 g/cm3。

圖2 釋放機構示意圖Fig.2 The mechanism to release the model

圖3 模型尺寸Fig.3 Sketch of water-entry model
2 試驗結果分析
2.1 圓柱體并聯入水過程空泡形態分析
圓柱體入水過程經歷了入水撞擊、空泡形成、開空泡、空泡閉合及空泡潰滅五個階段,具有較強的瞬時性和非定常特性。圖4(a)給出了圓柱體單獨入水過程入水空泡演化規律。在入水撞擊階段,圓柱體通過沖擊作用迅速將動能傳遞給水面附近流域的流體質點,流體質點獲得動能后,向外排開,與圓柱體頭部分離,空泡流動形成,如圖4(a)中t=0 ms所示;圓柱體在運動過程中通過阻力作用不斷將動能傳遞給前方流域的流體質點,已獲得動能的流體質點在慣性作用下繼續做向外排開運動,在空泡形態上表現為空泡直徑及長度的擴張,此時,空泡演化進入開空泡階段,如圖4(a)中t=12 ms和t=24 ms所示;在開空泡過程中,流體質點受水域壓力作用做減速運動,其動能逐漸轉換為壓力勢能,當流體質點運動速度減小至零時,空泡直徑達到最大,如圖4(a)中t=36 ms所示;此后,流體質點在水域壓力和空泡界面張力共同作用下開始向圓柱體中心線反向運動,空泡開始收縮,直至在水面附近或者水下某一深度空泡收縮為一點,此時空泡完成閉合,如圖4(a)中t=48 ms到t=60 ms所示;空泡完成閉合后,圓柱體頭部仍在誘導流體分離,空泡形成隨動,如圖4(a)中t=72 ms到t=84 ms所示;流體在隨動過程中由于回射流和空泡波動的影響逐漸潰滅,結束了整個空泡周期。
圖4(b)給出了軸線徑向間距Δd=2Dmm的兩個圓柱體并聯入水過程中入水空泡演化規律。從圖中可以看出,在開空泡階段,受到來自相鄰圓柱體的影響,入水空泡向兩圓柱體中間方向的擴張受到了限制,以致兩圓柱外側空泡半徑明顯大于內側,空泡形態呈現出明顯的不對稱特性,如圖4(b)中t=0 ms到t=36 ms所示;在空泡閉合階段,外側空泡界面率先收縮,在兩圓柱體軸線內側形成了深閉合,閉合點偏離了入水軌跡中心線,如圖4(b)中t=48 ms所示;閉合完成后隨體運動的空泡在形態上仍舊呈現明顯的不對稱性,如圖4(b)中t=60 ms到t=84 ms所示;由于單空泡的不對稱使得圓柱體所受水動力不對稱,進而使圓柱體運動穩定性受到影響,引起了圓柱體運動軌跡的偏移與運動姿態的偏斜。從圖中還可以發現,雙空泡形態在空間上呈現出良好的鏡面對稱特征。

(a) 單獨入水空泡形態

(b) 并聯入水空泡形態圖4 并聯入水與單獨入水空泡形態(v=1.5 m/s)Fig.4 The cavity of cylinder water entry alone and two cylinder water entry in paraller
結合圖5對空泡形態不對稱原因解釋如下:在開空泡階段,外側空泡自由擴張,而內側空泡的發展受到了相鄰圓柱體的影響。空泡在兩圓柱體中間區域擴張時,空泡邊界附近流體形成了對流,流體質點間動能傳遞受到限制而轉變成流場勢能,致使中間區域噴濺高度增加而空泡半徑減小,空泡形態呈現出不對稱特性。同時,由于中間區域較少的流體獲得了來自兩個圓柱體的動能,流動速度較外側區域大,致使該區域流場壓力低于外側空泡界面附近流場壓力,導致在空泡閉合階段,外側空泡界面在較大壓力作用下率先收縮,且收縮速率大于內側空泡界面,最終使得閉合點偏向兩圓柱體軸線內側。
2.2 圓柱體并聯入水過程運動特性研究
為研究圓柱體并聯入水過程中,兩圓柱體位移和姿態變化規律,建立如圖6所示圓柱體運動時間和空間坐標系。以圓柱體觸水時刻為時間零點,入水前取時間t<0,入水后取t>0;以水平面為X軸,豎直方向為Y軸,建立固定坐標系XOY研究圓柱體的移動特性;以兩圓柱質心為原點,水平方向為x軸,豎直方向為y軸,建立隨體坐標系x1o1y1和x2o2y2研究圓柱體姿態變化規律;以圓柱體軸線與y軸的夾角θ的大小表征圓柱體的偏轉角,左偏取負值,如圖6(b)中θ1。本文開展了兩圓柱體軸線間距Δd=2D,入水速度v=1.5 m/s、1.9 m/s、2.3 m/s、2.7 m/s及3.1 m/s五個同步并聯入水工況試驗。
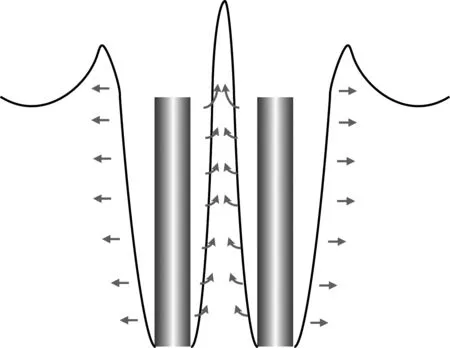
圖5 并聯入水空泡流動示意圖Fig.5 The flow schematic of water entry cavity

(a)(b)
圖6 圓柱體運動坐標系
Fig.6 Definition of coordinate system
為分析圓柱體并聯入水運動無量綱時歷特性,將時間按照下式進行無量綱化:
(1)


鑒于兩圓柱體運動的對稱性,后文將基于左圓柱體開展并聯入水過程運動特性分析。圖8給出了v=1.5 m/s、1.9 m/s、2.3 m/s、2.7 m/s及3.1 m/s工況下圓柱體偏轉角對比。從圖中可以看出不同入水速度工況下圓柱體姿態偏轉運動保持相同趨勢,且隨著速度的增大,偏轉發生時刻逐漸前移。圖9給出了空泡閉合時間與圓柱體偏轉時間的對比。由上一段的分析可知,圓柱體偏轉由空泡非對稱閉合引起,因而其與空泡閉合方式及閉合時間關系密切。當v=1.5 m/s、1.9 m/s、2.3 m/s時,空泡閉合方式為深閉合,且閉合時間隨著速度增大而變短,因此圓柱體偏轉發生時刻逐漸前移,從圖中可看出,圓柱體偏轉時刻略晚于空泡閉合時刻;當v=2.7 m/s、3.1 m/s時,空泡閉合方式為表面閉合,在該工況下,偏轉時刻大幅晚于空泡閉合時刻,說明空泡閉合瞬時的流體作用力對圓柱體姿態影響較小。此時影響偏轉運動的主要因素為頭部和尾部沾濕航行狀態所受流體動力,由于沾濕區域較小,圓柱體轉動慣量相對較大,兩個速度下流體動力差異對偏轉影響不明顯,導致兩圓柱體偏轉時刻較為接近。

圖7 v=1.9 m/s Δd=2D并聯入水偏轉角隨時間變化Fig.7 v=1.9 m/s Δd=2D the variation of rotation angle with times
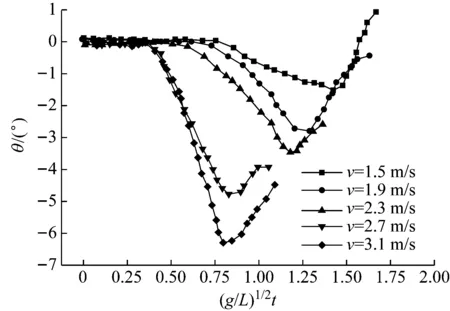
圖8 不同速度并聯入水偏轉角隨時間變化對比
Fig.8 Comparison of the variation of rotation angle with different water entry velocities at absolute time coordinate system
為研究并聯入水過程中入水速度對位移特性的影響,定義無量綱位移如下:
(2)
(3)

圖9 空泡閉合與偏轉發生時間隨入水速度變化Fig.9 Comparison of time of cavity closure with various water entry velocities


圖10 圓柱體質心Y方向無量綱位移變化Fig.10 Variation of Y-displacement with different water entry velocities
圖11給出了圓柱體質心在X方向的無量綱位移變化曲線,圖12給出了圓柱體頭部中心X方向無量綱位移變化曲線。從圖11中可以看出,當入水速度較高時,圓柱體質心橫向位移呈現先增大后減小的趨勢,其原因主要在于,當速度較高時,圓柱體動能大,兩圓柱體撞擊之后回彈現象顯著;當入水速度較低時,在所截取時間范圍內圓柱體質心橫向位移持續增大,撞擊回彈現象不明顯。
對圖8的分析中指出了影響圓柱體發生偏轉的主要因素為非對稱流體作用力,結合上一段對圖11的分析中所體現的撞擊回彈現象可知,影響圓柱體質心橫向位移的主要因素為非對稱流體作用力和撞擊力,其中非對稱流體動力的影響又包含間接影響和直接影響兩個階段。從圖8和圖11可發現,橫向位移的產生均發生在偏轉時刻附近;對比圖11和圖12可知,在質心橫向位移發生初期,當質心沿著X方向靠攏時,圓柱體頭部存在反方向的微幅運動。上述現象表明,在該階段圓柱體以偏轉運動為主,且旋轉中心處在質心和圓柱體頭部之間的某個位置,質心橫向位移由偏轉運動直接引起,非對稱流體作用力通過影響圓柱體的偏心偏轉而間接影響質心橫向位移。其原因解釋如下:在橫向位移發生階段,圓柱體大部分包裹在空泡內部,圓柱體主要受空泡界面非對稱收縮過程中圓柱體軸線左右空泡界面到達圓柱體壁面不同步引起的非對稱流體作用力,此時圓柱體頭部處于沾濕態且持續誘導空泡流動分離,而柱段卻包裹在空泡中,僅受空氣流體作用,因此頭部水平方向所受到的流體作用力較圓柱體柱段大,導致圓柱體旋轉中心偏向質心下方,引起圓柱體偏心偏轉,進而引起質心的橫向位移。在質心橫向位移的后期階段,從圖11和圖12可以看出,圓柱體頭部中心位移和質心位移方向相同,表明圓柱體在該階段存在明顯的橫向運動。其原因在于,兩圓柱體并列航行過程中,中間區域流場壓力較低,在空泡完成閉合后,圓柱體沾濕面積增加,所受到的非對稱流場壓力增大,在左右兩側壓差的作用下,圓柱體產生橫向運動。

圖11 圓柱體質心X方向無量綱位移變化Fig.11 Variation of X-displacement with different water entry velocities

圖12 圓柱體頭部中心X方向無量綱位移變化Fig.12 Variation of X-displacement of head center with different water entry velocities
在該階段圓柱體以橫移運動為主,非對稱流體作用力直接影響圓柱體質心橫向位移。
為了進一步說明非對稱流體作用力對圓柱體質心橫向位移影響的兩個不同階段,圖13對左側圓柱質心橫向運動和偏轉運動從開始至達到最大值的時歷范圍進行了提取。從圖中可以看出,橫向運動和偏轉運動發生時刻基本相同,表明質心橫向位移由偏轉間接引起;當偏轉角達到最大后,兩圓柱體彈尾相撞,而質心橫向位移還在不斷增加,表明在該階段橫向位移主要由非對稱流體動力直接引起。

圖13 橫移與偏轉從發生至達到峰值時歷范圍對比Fig.13 Comparison of the time period from occurring to maximum of X-displacement and rotation
圖14給出了橫移與偏轉達到峰值的時間隨速度的變化規律,從圖中可以看出,橫移與偏轉達到峰值的時間隨速度的增加而前移。從圖中可以發現,當v=3.1 m/s時,橫移與偏轉達到峰值的時間非常接近,其原因在于:當圓柱體運動速度較高時,圓柱體尾部碰撞回彈現象顯著,圓柱體頭部依舊持續誘導空泡流動分離,水平方向所受流體作用力較大,導致回彈過程中圓柱體偏轉運動依舊為偏心回轉,旋轉中心位于質心下方,進而導致質心橫向位移與偏轉角幾乎同時開始減小。

圖14 橫移與偏轉峰值時間隨速度變化規律Fig.14 Variation of the time that X-displacement and rotation reach to maximum with times
為進一步分析圓柱體入水過程的運動特性,對圓柱體運動位移變化曲線進行五階多項式擬合[17],并對擬合后的曲線求一階導數,得到圓柱體入水過程中的速度曲線,通過下式對速度進行無量綱化:
(4)

對于姿態角變化,本文截取了圓柱體偏轉角增大過程的角位移變化曲線,并對該曲線進行線性擬合,得到其轉角變化的平均角速度,如圖15所示。從圖中可以看出,圓柱體偏轉平均角速度隨著入水速度增加而增大。其原因在于,圓柱體入水后隨著入水速度的增加,Y方向阻力Ry增大,當圓柱體受到擾動發生偏轉后,由前文可知,圓柱體旋轉中心位于質心g和圓柱體頭部中間某個位置m,如圖16所示,阻力Ry增大使得圍繞旋轉中心的力矩加大,進而導致平均角速度增大。從圖中還可發現,當入水速度增大至表面閉合階段后,平均角速度變化率明顯加快。該現象間接體現了閉合方式的改變引起了力矩的變化,進入表面閉合階段后,圓柱體所受力矩較深閉合階段明顯增大。

圖15 平均角速度隨入水速度變化Fig.15 Variation of average angular velocity with water entry velocity

圖16 左側圓柱受力示意圖Fig.16 Force schematic of left cylinder
為了分析其內在原因,本文對空泡閉合后的無量綱特征長度進行了提取,特征長度定義為空泡閉合后的長度,如圖17中lc所示,并根據式(4)對其進行無量綱化,結果如圖18所示。

圖17 空泡特征長度定義Fig.17 Definition of the cavity length
(5)
從圖18可以看出,表面閉合空泡特征長度遠大于深閉合空泡特征長度,當空泡形成表面閉合后,圓柱體大部分包裹在空泡內部,彈尾沾濕面積減小,圖16中彈尾受到的流體阻力r亦隨之減小,使得圓柱體偏轉過程所受到的力矩增加。

圖18 空泡特征長度隨入水速度變化Fig.18 Variation of cavity length with the water entry velocitise
圖18中圓柱體入水速度大于2.7 m/s后,空泡特征長度由增加變為縮小,其原因解釋如下:當圓柱體入水速度大于2.7 m/s后,入水空泡的閉合方式呈表面閉合。表面閉合主要是由于入水撞擊在自由液面附近引起的薄膜式噴濺射流在氣液界面表面張力作用下收縮回卷,并最終到達圓柱體壁面而形成的閉合。在形成閉合后,與圓柱體壁面接觸的流體在黏性作用下隨圓柱體向下運動,并在黏性力、氣液界面張力作用下帶動周圍流體一同回卷并向下運動,形成穩定閉合。在并聯入水過程中,由于兩圓柱體中央區域流場動能向勢能轉換形成向上的流動,在噴濺射流達到圓柱體壁面完成空泡閉合后,薄膜射流表面張力和內部流體黏性力不足以克服流場向上的慣性作用帶動流體回卷并向下運動,此時所形成的閉合不穩定,射流薄膜破裂后會有空氣進入空泡,使空泡長度加長。隨著入水速度的增加,圓柱體傳遞給流域的能量增加,使得噴濺射流強度增加,縮短了空泡完成閉合到形成穩定閉合的時間,使得閉合期間進入空泡內的空氣量減少,進而使得穩定閉合后空泡的特征長度減小。
圖19給出了入水過程Y方向無量綱速度變化曲線。從圖中可以看出,當入水速度較低時,圓柱體入水后速度呈現先增大,后減小趨勢;當入水速度較高時,圓柱體入水后速度持續減小。其原因解釋如下:當速度較低時,在圓柱體入水初期,其所受重力大于阻力,所以圓柱體速度持續增加;隨著速度的增加與沾濕面積增大,圓柱體受到的阻力逐漸增大,阻力對速度的貢獻占據主導地位,速度開始減小。當速度較高時,入水初期,其所受阻力便大于重力,在圖中所截取的運動過程內,阻力始終占據主導地位,圓柱體速度持續減小。
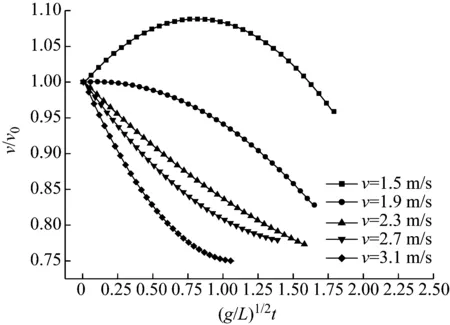
圖19 Y方向無量綱速度變化曲線Fig.19 Variation of Y-velocity with the times
3 結 論
本文針對圓柱體低速并聯入水過程空泡及運動特性變化規律開展了研究,對比了雙圓柱體并聯入水與圓柱體單獨入水空泡形態差異,量化分析了不同入水速度對圓柱體偏轉角、橫向位移、縱向位移以及偏轉角速度和縱向線速度的影響規律,得到如下結論:
(1) 相比于圓柱體單獨入水,并聯入水空泡形態呈現明顯的不對稱性,外側空泡半徑大于內側,閉合點偏離了圓柱體運動軌跡中心線,在兩圓柱體軸線內側形成閉合;從全局來看,兩個空泡形態呈現出良好的鏡面對稱特征。
(2) 并聯入水過程圓柱體偏轉運動呈現良好的對稱性,偏轉發生時刻與空泡閉合方式密切相關;深閉合階段隨著入水速度的增加,偏轉發生時刻前移,發生時間與空泡閉合時間接近;表面閉合階段,隨著入水速度增加,偏轉發生時刻不再改變。
(3) 入水過程中兩圓柱體在豎直方向遷移運動相互干擾較小,橫移運動相互影響較大。影響圓柱體橫向位移的主要因素為非對稱流體作用力和兩圓柱體尾部撞擊力。
(4) 圓柱體平均偏轉角速度隨著入水速度增加而增大,在空泡表面閉合階段,圓柱體所受平均偏轉力矩較深閉合階段大。
