設施溫室智能化平臺技術研究
2019-04-22 03:03:52張艷紅郭建業潘張磊
蔬菜 2019年4期
張艷紅,秦 貴,張 嵐,郭建業,潘張磊
(北京市農業機械試驗鑒定推廣站,北京 100079)
設施農業是北京農業的重要組成部分,日光溫室是設施農業的主要生產形式,據2014年年底數據統計,日光溫室在北京市各種設施農業結構形式中占地面積65%,約15 800 hm2[1]。但由于日光溫室空間狹窄,僅在耕整地環節有比較適用的微耕機作業,綜合機械化水平很低[2],表現為作業效率低、旋深淺(小于12 cm)、勞動強度大、燃油污染嚴重。日光溫室蔬菜生產中的其他作業環節,如施撒有機肥、鋪管覆膜、種植移栽、運輸等基本以人工作業為主,勞動強度大、作業效率低,急需實現機械化作業。為提高日光溫室綜合機械化作業水平、提高耕整地作業質量、降低勞動強度,北京市農機試驗鑒定推廣站聯合企業共同研發了設施溫室智能化平臺。
1 智能化平臺的設計特點
平臺以電源為動力,將日光溫室蔬菜生產中各環節所需的農機具集合安裝在該平臺上,實現一機多用;并采用程序化設計實現自動化或半自動化控制功能;同時輔以電子信息技術,實現遠程監控作業模式。
1.1 實現一機多用、多環節機械化作業
設施溫室智能化平臺根據日光溫室空間結構特點,采用了軌道、龍門式橫梁設計,實現了縱向、橫向行走及上下升降運動,專門用于日光溫室蔬菜生產機械化作業。設施溫室智能化平臺通過回旋盤結構,可以方便、快捷地與多種農機具連接配合,實現一機多用、多環節機械化作業,大幅度提高了日光溫室機械化作業水平。
工作時,平臺主機安裝上配套的農機具后,沿兩側的軌道前后移動縱向行走,沿主橫梁左右移動橫向行走,同時主機可上下升降運動,從而實現在日光溫室內三維化運動模式,輔以不同的作業機具,可以有效地實現有機肥撒施、土地耕整、開溝起壟,鋪管覆膜、播種移栽、灌溉植保、果實運輸等多環節無死角作業,提高日光溫室綜合機械化作業水平和作業質量。
1.2 實現主機在日光溫室間轉移作業
在一個園區內,同等寬度軌道設計情況下,可以實現主機在日光溫室間轉移作業,充分發揮主機效率,提高設備利用率。
各溫室鋪設同等跨度縱向軌道,同時在軌道一端鋪設轉運軌道。轉運軌道上對接轉運軌道車,該轉運軌道車也是各配套農機具載體。在轉運軌道車上安裝主要配套農機具碼放支架,確保農機具碼放支架定位準確,以方便主機掛接。
當主機平臺轉運作業時,龍門式橫梁和主機沿縱向軌道行駛到轉運軌道車上,啟動轉運軌道車電機,轉運軌道車載著龍門式橫梁和主機以及碼放在轉運軌道車上的配套農機具,一同沿轉運軌道行走到下一棟溫室,對接好該棟溫室縱向軌道,完成主機平臺的轉運工作。
1.3 實現自動化或半自動化生產作業
設施溫室智能化平臺的集成應用,有力地促進了農機農藝融合發展,形成了以機械化作業為主的日光溫室蔬菜生產新模式。由于設施溫室智能化平臺可實現自動化或半自動化生產作業,同時通過網絡可實現作業情況報告和遠程監測,減少勞動力用工量,緩解農忙時節用工緊張問題;同時大幅度降低勞動強度,打破了傳統上以人工作業為主的溫室蔬菜生產模式。
1.4 實現節能減排
設施溫室智能化平臺以電能為動力,避免了汽油機、柴油機等機械設備作業時造成的環境污染,使用方便,運行成本低。
2 智能化平臺的設計方案
2.1 平臺總體結構設計
設施溫室智能化平臺以電能為動力,實現一機多用,主要由2條平行的地軌、在地軌上縱向行走的橫梁、橫梁上橫向行走的主機、主機上回轉盤以及控制系統組成[3-4](圖1)。
縱向行走軌道長度和跨度根據日光溫室結構而定;龍門式橫梁主要由龍門架、驅動電機、行走輪、控制系統等部件構成,通過齒孔嚙合,沿縱向軌道前后行走;主機主要由框架、驅動電機、行走鏈輪、升降系統、回轉系統、電動伸縮桿等組成,通過鏈傳動,沿龍門式橫梁左右行走。主機升降系統采用獨立電機控制,通過機械傳動實現主機回轉系統上下升降;回轉系統在獨立電機驅動下,通過蝸輪蝸桿減速裝置可實現回轉盤180°往返旋轉運動。
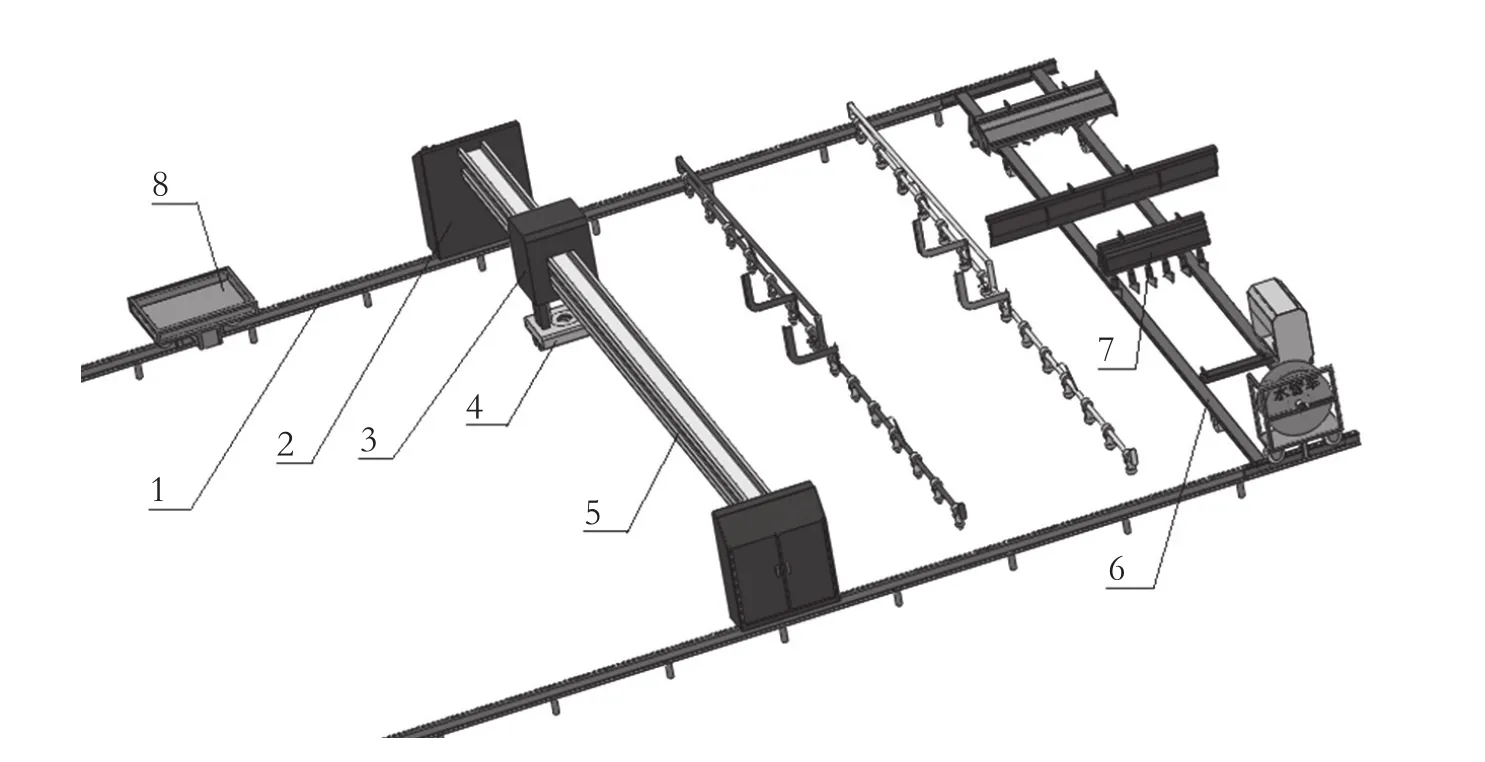
圖1 設施溫室智能化平臺的總體結構
設施溫室智能化平臺作業時,主機行走到作業機具坐標位置,啟動電動伸縮桿快速掛接農機具,歸位縱向(橫向)作業原點。若啟動手動作業程序,每一步作業均需人工操作完成。若啟動自動作業程序,將按輸入程序自動完成既定的作業。如縱向自動旋耕作業,先啟動旋耕機旋耕刀,然后主機旋轉盤下降,使旋耕刀達到既定旋耕深度,接著龍門式橫梁帶動主機沿縱向軌道行走開始旋耕作業。當達到既定的作業行程時,龍門式橫梁帶動主機停止運動,主機旋轉盤提升,使旋耕刀離開地面達到既定高度;此時,主機帶動旋耕機沿作業方向后移0.5 m,然后回轉盤電機啟動驅動旋耕機旋轉180°,完成旋耕作業方向調整。此時,主機再次帶動旋耕機沿作業方向后移0.5 m,然后沿龍門式橫梁移動一個作業幅寬,再驅動旋轉盤下降,使旋耕刀達到既定旋耕深度,接著龍門式橫梁帶動主機沿縱向軌道行走開始回程旋耕作業。如此往復既定的作業行程,自動完成日光溫室內無死角旋耕作業。同理也可以實現自動化起壟、播種等環節作業。
2.2 設施溫室智能化平臺行走機構設計
2.2.1 縱向行走機構設計
設施溫室智能化平臺縱向行走機構主要由支撐架、電機、減速箱、鏈傳動、驅動齒輪、從動輪等部件構成,在兩側軌道各制作1套。通過電控調頻控制保證兩側縱向行走機構同步運動。
2.2.2 橫向行走機構設計
設施溫室智能化平臺橫向行走機構主要由支撐架、電機、減速箱、鏈傳動、驅動鏈輪、側支撐輪等部件構成。通過電控調頻控制實現橫向行走變速運動。
2.2.3 升降運動機構設計
設施溫室智能化平臺主機升降運動機構主要由支撐架、電機、絲杠等部件構成。通過絲杠旋轉實現主機升降運動,并可停留在所要求的作業高度。
2.2.4 往返運動機構設計
設施溫室智能化平臺主機往返運動機構主要由支撐架、電機、蝸桿、蝸輪等部件構成。通過電動控制實現回轉盤180°內不同角度的旋轉,從而滿足作業要求。
2.3 農機具的設計
設施溫室智能化平臺主機通過旋轉盤可以懸掛各種農機具,根據作業需要與主機配套集成,實現主機+不同農機具的機械化作業模式;本次研發以實現葉類蔬菜(主要以油菜為代表)全程機械化作業為目標,設計配套農機具,葉類菜生產主要包括土地旋耕、平整、播種、噴灌、植保、運輸環節作業[5]。
2.3.1 旋耕機設計
旋耕機采用雙電機同步驅動,主要由機架、快速連接吊耳、旋耕部件、減速機、鏈傳動部件構成(圖2)。耕幅寬度1.0 m,耕深15~20 cm。
2.3.2 平地鏟設計
平地鏟主要由機架、快速連接吊耳、鏟面部件構成(圖3)。平地作業幅寬2.0 m。
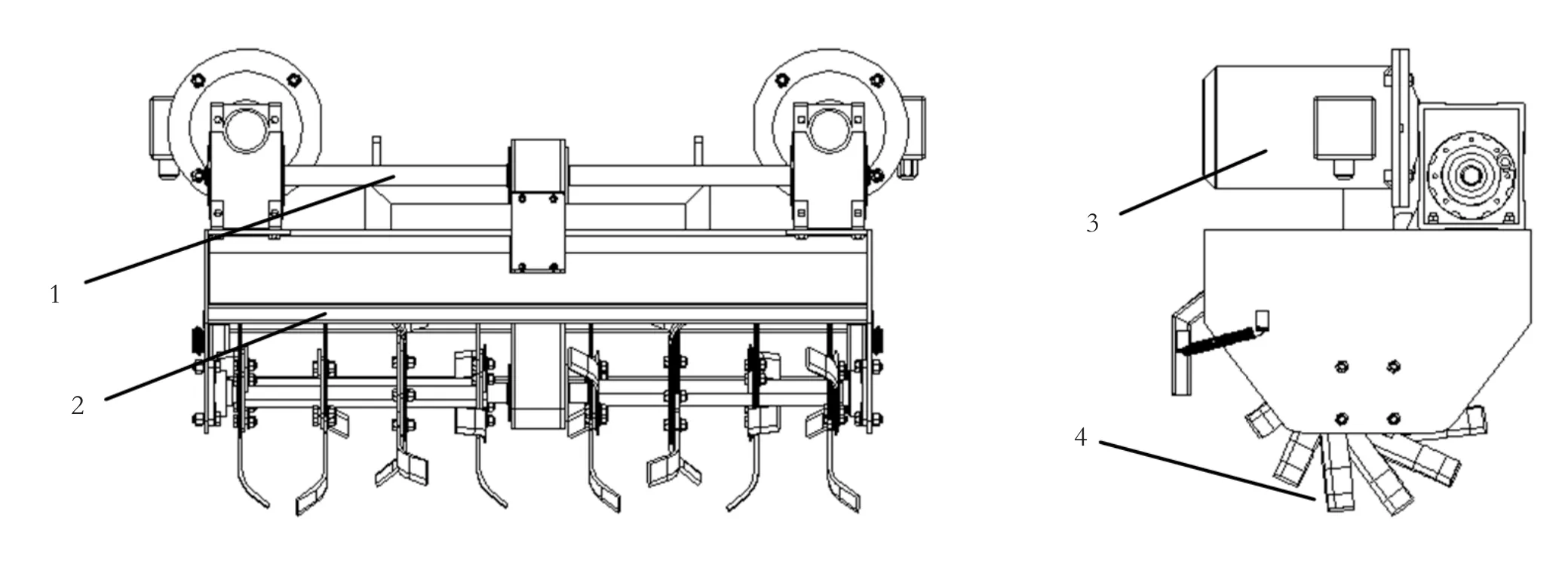
圖2 旋耕機結構
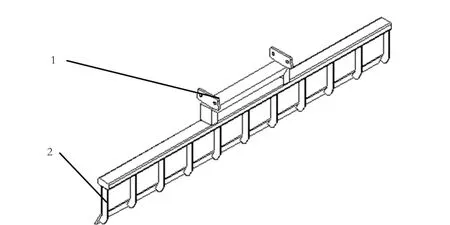
圖3 平地鏟結構
2.3.3 播種機設計
播種機采用變頻電機驅動,主要由機架、快速連接吊耳、播種部件、鎮壓輥部件構成(圖4)。播種幅寬0.9 m;播種行數1~6行可調;行距15.0、18.0、22.5、30.0 cm可調;粒距2~30 cm可調。
2.3.4 噴灌系統設計
噴灌系統主要由機架、噴灌桿、噴頭、復卷式供水管系統構成(圖5)。在滿幅噴灌噴桿上安裝噴水、噴藥、施肥三用噴頭。當進行澆水作業時,設定好主機行走速度,調整好噴頭,將復卷式供水管快速接通噴桿,打開閥門即可實現澆水作業。當施肥(液態)作業時,設定好主機行走速度,調整好施肥噴頭,連接好施肥罐,將復卷式供水管快速接通噴桿,打開閥門即可實現施肥作業。
2.3.5 植保系統設計
植保系統主要由機架、噴桿、噴頭、藥箱、電機、泵等部件構成(圖6)。當植保作業時,設定好主機行走速度,調整好打藥噴頭,將藥箱管路快速接通噴桿,啟動電機、泵即可實現植保作業。
2.3.6 運輸車設計
以單邊縱向軌道為基礎,運輸車設計成遙控式單軌運動形式。運輸車主要由機架、車斗、電機、減速箱、鏈傳動、驅動齒輪、從動行走輪、側支撐輪、蓄電池、控制系統等構成(圖7)。可承載質量不大于100 kg,遙控有效距離100 m內。
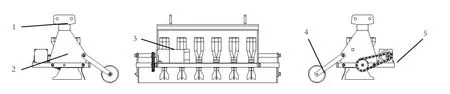
圖4 播種機結構
3 平臺在油菜上的應用效果
在試驗示范園區進行了油菜播種試驗,效果良好(圖8)。
3.1 旋耕作業
采用縱向旋耕作業模式,絕對深度18 cm,耕幅1 m,行進速度10 m/min。觀察設備作業情況,測耕深和碎土率。
采用縱向旋耕作業模式,將平臺主機安裝好旋耕部件,歸位縱向作業原點,設定旋耕深度為18 cm,行程23 m,橫向移動1.0 m,啟動旋耕縱向作業模式,自動完成7個往返作業耗時25 min,作業效果良好。
沿機組前進方向,用耕深尺測定旋耕深度5次,均大于18 cm。在耕幅內測定0.5 m×0.5 m面積內的全耕層土塊5次,土塊邊長均小于4 cm。
3.2 土地平整作業
油菜播種要求種子播深一致以利于出苗,旋耕后的土地需要刮平以保證更高的出苗率。
對同一棟溫室來說土地一次大平整后基本處于平整狀態,播種前的平地作業完全手動操作。以軌道頂面為測量0點標高,根據溫室土壤地面高度,在總土量基本平衡的情況下,確定平地鏟作業標高為-10 cm,進行橫向、縱向行走,并根據土壤地面情況,以-9 cm標高作業,將土壤刮平。
3.3 播種作業
進行油菜播種作業,油菜種子基本圓粒形,直徑在1.8~2.2 mm,故選用6穴眼3 mm播種輪作業。縱向播種油菜作業,要求行距15 cm,株距5 cm。將平臺主機安裝好播種部件,歸位縱向作業原點,匹配株距設定縱向行走速度10 m/min,播種機播種轉速為35 r/min,行程23 m,橫向移動0.9 m,啟動播種作業模式,自動完成6個往返作業耗時26 min,作業良好。
待出苗后挑選2行各選擇1 m,經觀察、計算,油菜重播率、漏播率符合播種機要求,播種株距變異系數小于3%,基本穩定在5 cm左右。
3.4 植保、灌溉作業
在油菜播種后,主要是植保、灌溉管理作業,接好澆灌系統歸位起點,設定設施溫室智能化平臺縱向行進速度0.5 m/min(根據澆水量可調整行進速度)進行澆灌作業。植保作業時,接好藥箱系統,調整縱向行走速度,自動完成植保作業。測定澆灌、植保均勻系數大于90%,效果較好。
3.5 運輸作業
在油菜收獲后,成筐擺放在遙控運輸車上,遙控距離大于50 m,一次可承載100 kg,運行穩定。
4 智能化平臺的經濟效益分析
以油菜生產為例,在不考慮設備成本情況下,在旋耕、平整地、播種、噴灌澆水等環節應用設施溫室智能化平臺,每棟日光溫室、每個茬次可節約10個人工,按每人每日120元計算,每667 m2每茬可節約人工成本1 200元,每667 m2溫室每年按生產6茬次葉類菜(油菜)計算,可節約人工成本7 200元。
雖然設施溫室智能化平臺前期研發投資與試驗投資偏高,待設備性能可靠、運行穩定后批量生產,可大幅度降低設備成本,同時節約人工成本。只要完成了溫室軌道及溫室間轉運軌道的建設,1套平臺主機可以完成多個溫室的農機作業,不用購買拖拉機、各種農機具,避免了重復投資。設備定型后平臺主機成本低于10萬元。
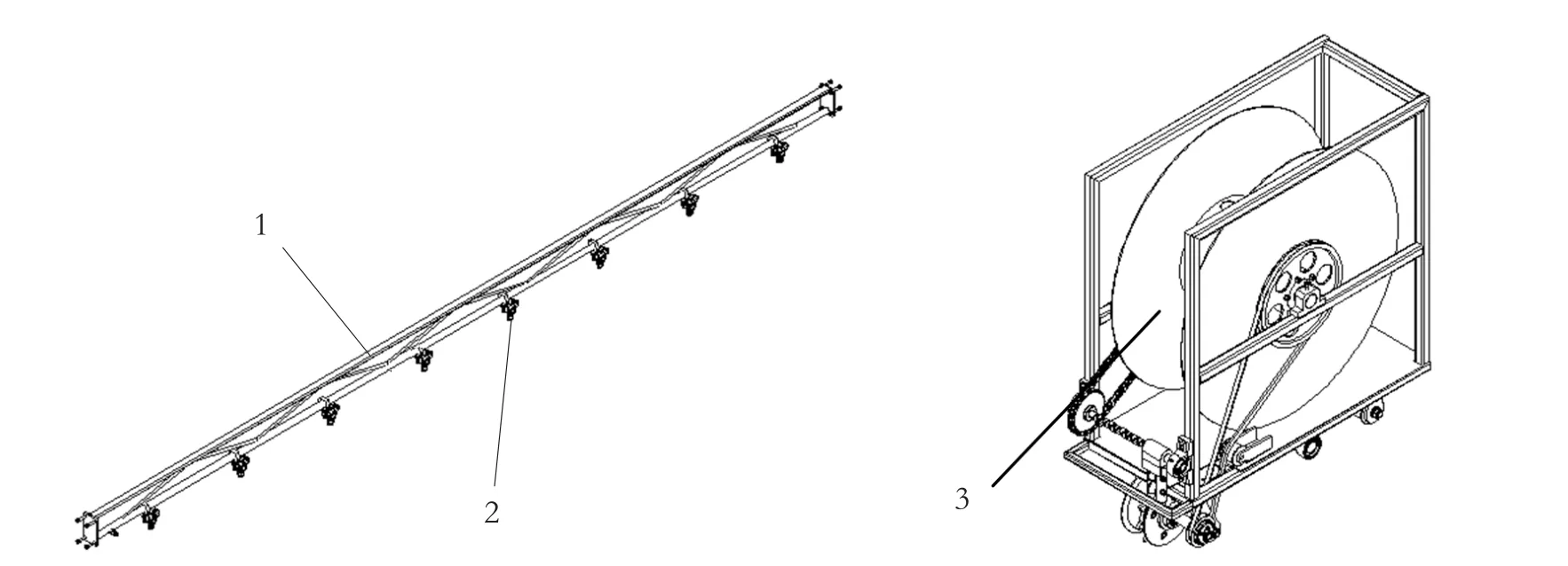
圖5 噴灌系統結構
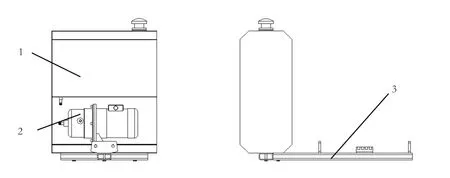
圖6 植保系統結構
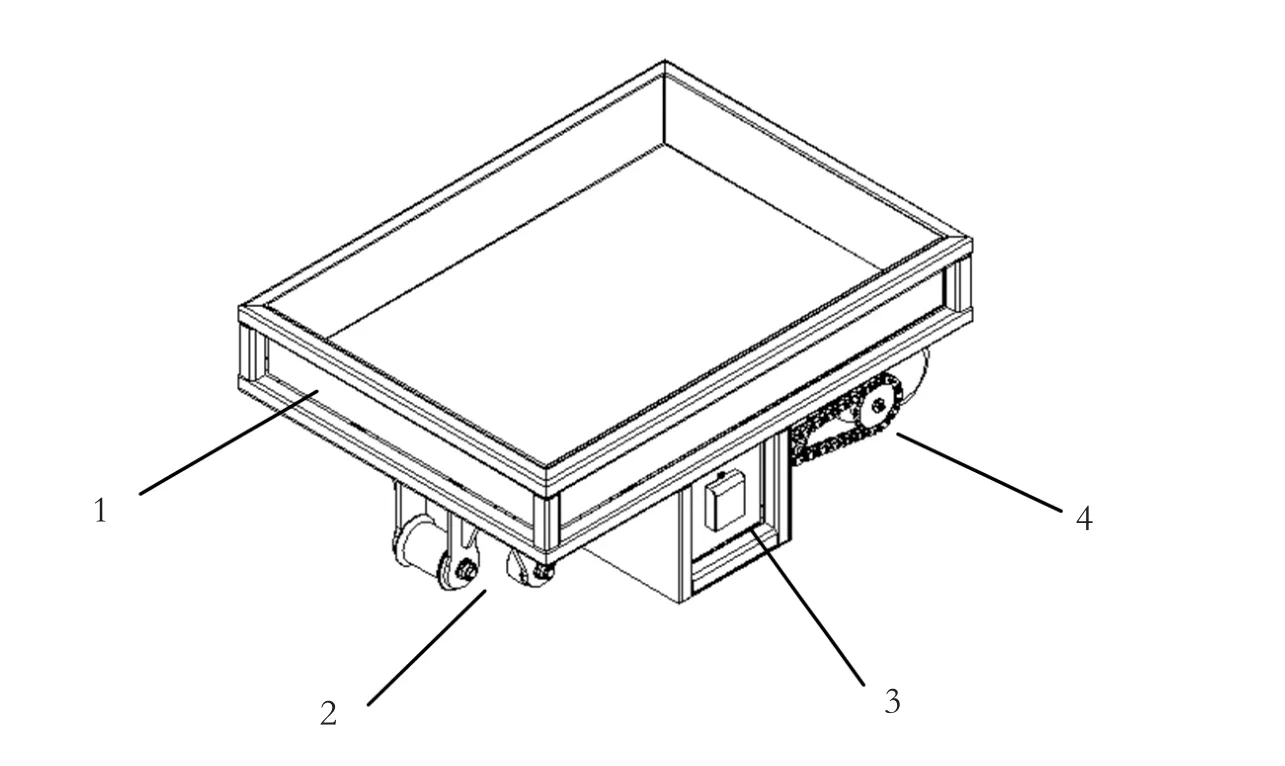
圖7 運輸車結構
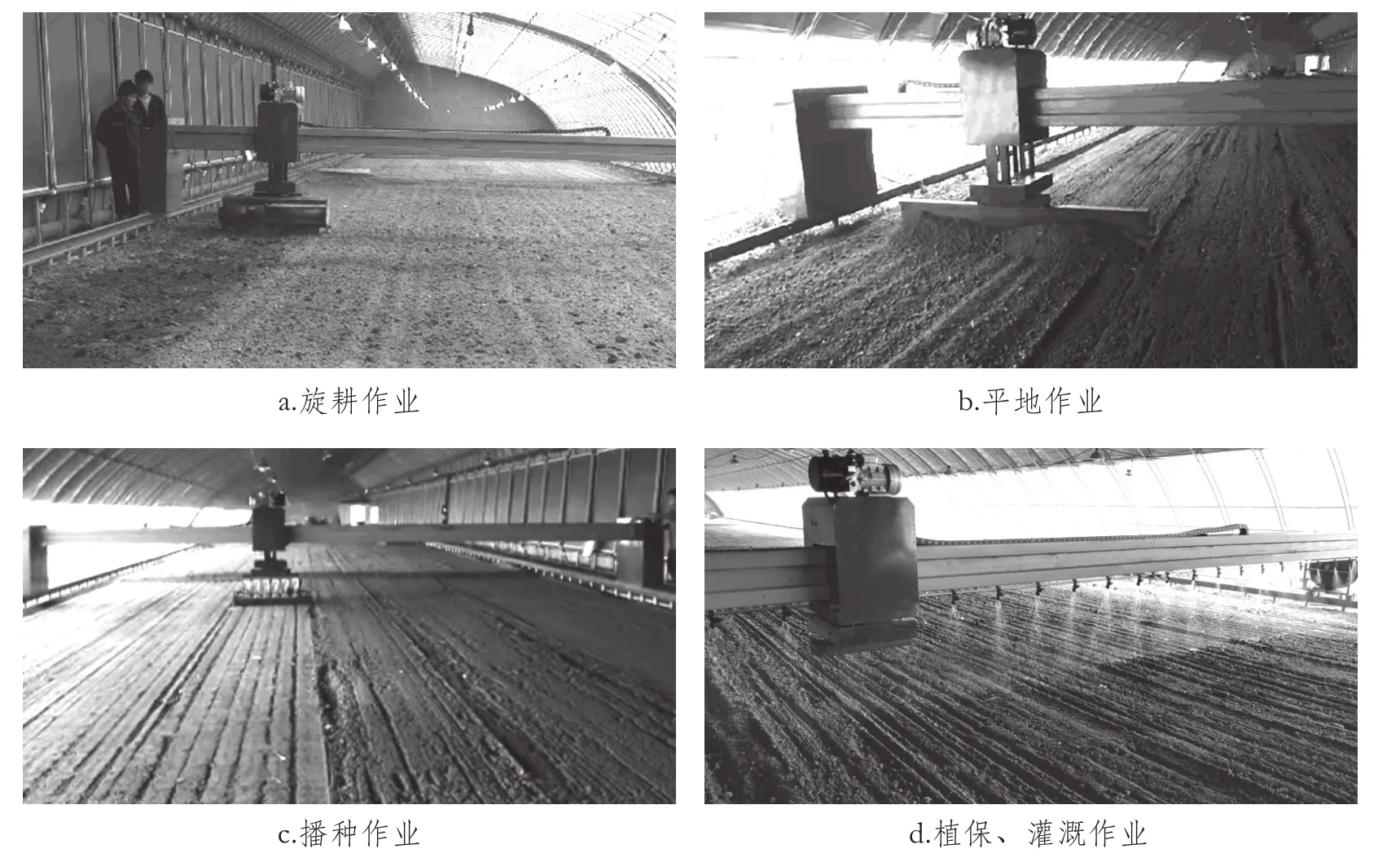
圖8 智能化平臺作業試驗
5 智能化平臺應用前景分析
設施溫室智能化平臺是設施蔬菜種植園區內的專用生產裝備,1套裝備基本可滿足園區內50棟日光溫室的生產作業,通過配套溫室軌道,便可實現葉類菜全程機械化生產作業。在設備成本投入方面,配備設施溫室智能化平臺主機+配套農機具及軌道,減少了拖拉機、旋耕機、起壟機、植保機械等設備投資;在使用成本方面,增加電費支出,減少汽油、柴油消耗支出,并節約大量人工費用。
目前,平臺實現了葉類菜(油菜)全程機械化作業,未來將進一步完善主機平臺性能,加大果菜類生產關鍵環節如自動化鋪管覆膜、移栽等配套農機具研發力度,逐步實現設施蔬菜生產全程機械化作業。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
建材發展導向(2021年10期)2021-07-16 07:13:24
印刷工業(2020年4期)2020-10-27 02:46:02
印刷工業(2020年4期)2020-10-27 02:45:52
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中國交通信息化(2017年4期)2017-06-06 07:21:52
故事大王(2016年7期)2016-09-22 17:30:08
能源(2015年8期)2015-05-26 09:15:56
