基于虛擬現實技術的產鉗操作模擬訓練系統的研究和設計
2019-04-22 07:16:20李力唐昊霞
科技與創新 2019年7期
關鍵詞:系統
李力,唐昊霞
?
基于虛擬現實技術的產鉗操作模擬訓練系統的研究和設計
李力,唐昊霞
(湖南工業職業技術學院,湖南 長沙 410208)
針對當前產鉗助產培訓手段落后、效率低下的問題,提出了一種產婦分娩過程中產鉗使用技術的培訓、評估手段及其模擬系統。此系統基于虛擬現實技術,結合了產科技術和計算機圖像處理技術,是一套兼具高科技和高成效的產鉗模擬操作系統及評價方法。
產鉗;助產;模擬訓練;虛擬現實
現階段,醫科院校及醫院在訓練產科醫生的產鉗操作技術時主要利用產婦盆腔模型,而這種傳統的訓練方式,在評估標準和反饋途徑上不夠精確,在教學和培訓效果上也是不盡人意的。因此,產科學界急需一種能提高產科醫生產鉗術的培訓手段。本文提出的產婦分娩過程中產鉗使用技術的培訓、評估手段及其模擬系統,將現代高度發展的計算機技術應用到產鉗術的培訓中,改變了傳統的、低效的產鉗術培訓方式。
1 系統硬件組成
在臨床應用中,使用產鉗助產時需要將產鉗置入產婦體內,因此,助產者只能通過積累的經驗估計產鉗所到達的嬰兒頭部的位置,也難以恰如其分掌握產鉗牽引力道。為解決產鉗操作培訓中遇到的上述問題,本文提出一種產婦分娩過程中產鉗使用技術的培訓、評估手段及其模擬系統。本系統采用基于計算機的三維可視化技術,可以在顯示設備上從多個角度指示和觀察產鉗在產婦體內的實時姿態和位置,操作者通過畫面反饋從而對鉗葉的位置和力度進行修正,通過產鉗給胎頭施加一個與產婦產力同頻同步的牽引力來達到助產的目的。本系統由高性能計算機及顯示器、產婦骨盆模型及嬰兒模型、數據采集傳感器、產鉗以及胎頭驅動機構5大部分組成,系統組成框架如圖1所示。
本系統中,在產鉗的鉗葉片前段安裝了壓力傳感器,用于檢測助產時產鉗對胎頭施加的壓力以及產鉗的位姿;在產鉗的鉗葉片把手端安裝了三維空間跟蹤器探頭,用于檢測產鉗葉片的空間位置及產鉗姿態。如圖2所示,壓力傳感器21設置于產鉗葉前段內側處,三維空間跟蹤器探頭22位于鉗葉把手端。嬰兒系統機械連接結構如圖3所示。31為胎頭,由醫學模型組成;32為胎頭位姿檢測探頭,它為三維空間跟蹤定位器的一部分,用于實時檢測胎頭的位姿數據;33為拉力傳感器,用于檢測在助產過程中產鉗施加在胎頭上的牽引力;多自由度機械關節34支撐胎頭與驅動軸的連接,使得胎頭模型在移動過程中能以關節中心點為原點進行任意方向的活動;柔性管35套接在前述多自由度機械關節上,起支承胎頭作用;36為傳動桿,傳遞動力源的驅動力;37為驅動動力源,可為電機或者氣動液動機構。

圖1 系統結構框圖
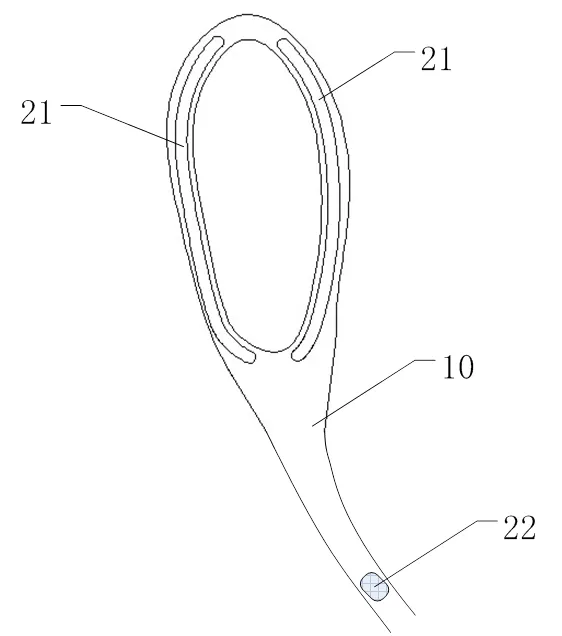
圖2 產鉗傳感器布局示意圖
產婦系統與胎兒系統結構布局如圖4所示。41為產婦盆腔模型,是產婦系統的基礎,采用醫學助產模型;柔性橡膠氣囊42設置在產婦盆腔及產道兩側,用于模擬產婦的盆腔及產道肌肉。

圖3 嬰兒系統連接結構圖

圖4 產婦系統與胎兒系統結構布局圖
本系統的電氣結構如圖5所示。高性能計算機系統負責整個系統的控制以及人機交互,是整個模擬器系統的核心。三維空間跟蹤定位器由機盒以及傳感探頭組成,傳感探頭把收集到的產鉗和胎頭位姿信號傳送至主機盒,再由主機盒將信號處理后通過串口發送至計算機系統。下位機控制器為單片機系統,可直接通過串口與計算機系統連接,用于處理和傳送產鉗夾緊力及牽引力的傳感器數據,同時負責執行計算機系統發出的驅動機構驅動指令。

圖5 系統電氣結構圖
2 系統軟件組成
軟件系統由數據采集模塊、圖形驅動模塊、產婦骨盆及嬰兒3D模型、數據信息顯示模塊、產鉗操作技能訓練模塊、產鉗操作技能考核模塊、胎頭驅動控制模塊組成。軟件系統結構如圖6所示。

圖6 系統軟件結構圖
3 系統工作原理
如上所述,本系統主要具有產鉗鉗葉放置技能的訓練及評估和產鉗助產過程中產鉗操作技能的訓練及評估兩項功能。產鉗鉗葉放置技能訓練及評估的工作原理:操作者將產鉗拆分為左右兩葉并將其充分潤滑,然后根據產鉗助產臨床操作流程分別將左葉產鉗和右葉產鉗經產婦產道放置于抬頭左右兩側并鎖合鎖扣。在此操作過程中,安裝在鉗葉上的三維空間跟蹤定位器探頭檢測到鉗葉的空間位置和姿態的變化,該數據被實時經由計算機系統的數據采集模塊傳送至虛擬3D圖形驅動模塊,計算機系統的圖形引擎根據該數據來對虛擬場景中的3D鉗葉模型進行位置和姿態的刷新,從而使虛擬場景中的產鉗模型與操作者操作的真實產鉗進行同步動作。在計算機的顯示端,采用基于虛擬現實的多視窗顯示技術從多個角度對產婦骨盆及胎頭進行監視,通過這項技術,操作者可以很直觀地觀察到鉗葉在產婦產道內的位置及動作軌跡,計算機軟件將同步記錄此數據。在后期的訓練中,可將新手的操作關鍵技能點數據與正確的鉗葉放置位置和規范操作路徑進行對比、評估,從而實現對新手操作的評估和考核。此外,從新手訓練的角度出發,虛擬場景中還以圖形或者文字的形式提供參考的鉗葉移動路徑和位置,初學者可根據相應提示進行練習,從而達到訓練產鉗鉗葉放置技能的目的。
產鉗牽引助產技能訓練及評估的工作原理:在前述產鉗鉗葉放置正確并鎖合鎖扣后,再通過產鉗助產協助產婦生產。產鉗助產的基本原理:通過操作產鉗給抬頭施加一個牽引力來輔助產婦進行生產,該牽引力需要與產婦自身的產力同頻同步,因此,產鉗牽引助產技能的關鍵就在于準確把握產婦宮縮的頻率。
本系統中,產婦宮縮力數據由醫學臨床采集或者計算機軟件模擬產生,由胎頭驅動裝置來模擬真實臨床情況下產婦在生產時的宮縮情況,并在顯示設備上用曲線的方式來描述宮縮變化,初學者根據該曲線的變化規律在產婦宮縮時通過產鉗向胎頭施加一個同步的牽引力來達到助產的目的,位于胎頭與驅動桿之間的力傳感器實時檢測該牽引力的大小并傳送至系統的數據采集模塊,計算機軟件根據產鉗施加的牽引力向胎頭驅動機構輸出指令驅動胎頭產生相應移動,直至將胎頭牽引至產科臨床所需位置,從而完成助產過程。在此過程中,三維空間跟蹤定位器獲取的胎頭以產鉗的位姿數據被實時的傳送至圖形模塊,從而驅動相對應的3D模型位置更新。在助產過程中,產婦的產力以及產鉗施加的牽引力被顯示在同一時間坐標系中,操作者可以由此來修正自己的動作以期達到訓練目的。通過一定的評估算法來對比此牽引力與產婦產力,實現對操作者的考核評價。
4 總結
本文提出的產鉗模擬操作系統及其評價方法基于虛擬現實技術,將計算機圖形處理技術、機電控制技術應用到產鉗操作技能培訓中,能對產科臨床產鉗操作技能進行直觀、科學的技術引導,進而能對產鉗助產過程中的產鉗使用技術進行科學準確評估,從而能夠直觀精確地幫助廣大產科從業者快速高效掌握產鉗助產技術,與傳統的手把手教學、機械模型練習相比,提高了產鉗術的培訓效率和質量,更能促進產鉗助產術的發展。
[1]陳剛,李力.一種產鉗操作模擬訓練器及其操作方法:中國,CN201210297090.6[P].2014-09-03.
[2]許運梅.改良式低位產鉗術聯合無保護會陰助產對母嬰預后的影響[J].基層醫學論壇,2018,22(29):4098-4099.
[3]包永華.基于VR技術的分析儀器虛擬維修拆裝教學訓練系統設計[J].現代食品,2017(24):7-10.
[4]蘆甜.虛擬現實技術在室內設計教學中的應用研究[J].建材與裝飾,2017(52):114-115.
[5]楊江濤.計算機虛擬現實關鍵技術研究[J].南方農機,2017,48(24):136.
[6]董浩,蓋帥,高湛.基于虛擬現實的雙臂機器人運動仿真系統研究[J].天津科技,2017,44(12):51-54,57.
[7]姜云蘭.產鉗在頭位困難剖宮產術中的應用價值[J].中國婦幼保健,2017,32(23):5885-5887.
[8]曾曉明,歐陽安.雙手旋轉胎頭糾正持續性枕橫(后)位的臨床觀察[J].江西醫藥,2017,52(10):1040-1041.
[9]馬衛星.陰道分娩產鉗助產76例分析[J].世界最新醫學信息文摘,2017,17(82):68-69.
[10]李容芳,徐燕媚,鄧瓊.新產程標準與助產措施對產鉗助產、中轉剖宮產和新生兒窒息發生率的影響[J].海南醫學,2017,28(19):3227-3229.
[11]夏鳳芹,紀彬彬.產鉗助產術154例臨床分析[J].世界最新醫學信息文摘,2017,17(80):151-152.
[12]李莉.剖腹產術后再孕陰道分娩產鉗助產的應用價值研究[J].臨床醫藥文獻電子雜志,2017,4(71):13919.
[13]李雯,劉明.大S拉鉤及單葉產鉗在剖宮產術中助娩胎頭的對比分析[J].世界最新醫學信息文摘,2017,17(67):54-55.
2095-6835(2019)07-0146-03
TP399
A
10.15913/j.cnki.kjycx.2019.07.146
李力(1983—),男,湖南長沙人,碩士研究生,講師,主要研究方向為機電一體化技術、虛擬現實仿真技術。
〔編輯:嚴麗琴〕
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32