基于滑轉(zhuǎn)率的四輪輪邊驅(qū)動(dòng)客車電子差速控制策略
2019-04-16 08:09:06陳曉菲楊明亮羅立全
陳曉菲,劉 平,楊明亮,孫 磊,羅立全
(西南交通大學(xué) a.機(jī)械工程學(xué)院; b.先進(jìn)驅(qū)動(dòng)節(jié)能技術(shù)教育部工程研究中心, 成都 610031)
輪邊驅(qū)動(dòng)電動(dòng)汽車是一種新型的電動(dòng)汽車,取消了發(fā)動(dòng)機(jī)、傳動(dòng)軸、差速器等機(jī)械結(jié)構(gòu),4個(gè)電機(jī)通過(guò)減速器直接與各個(gè)驅(qū)動(dòng)車輪相連,不僅在傳遞上具有更高的效率,在控制上也具有很高的靈活性,但由于取消了機(jī)械差速器則需要設(shè)計(jì)有效的電子差速控制策略。當(dāng)前電子差速主要分為轉(zhuǎn)速控制和轉(zhuǎn)矩控制。基于轉(zhuǎn)速控制主要通過(guò)理想汽車轉(zhuǎn)向模型(Ackermann模型)計(jì)算出理想輪速,并以此為依據(jù)對(duì)電機(jī)轉(zhuǎn)速進(jìn)行控制[1-2],以期實(shí)現(xiàn)車輪在路面上純滾動(dòng)。但Ackermann模型只適用于低速轉(zhuǎn)向工況,并且實(shí)際行駛路面十分復(fù)雜,難以實(shí)現(xiàn)理想輪速的精確估算,若控制不當(dāng)整車會(huì)出現(xiàn)不穩(wěn)定的情況,因此不采用轉(zhuǎn)速控制。電動(dòng)輪驅(qū)動(dòng)汽車在轉(zhuǎn)矩模式下能實(shí)現(xiàn)自適應(yīng)差速,并通過(guò)仿真試驗(yàn)和實(shí)車驗(yàn)證了該結(jié)論[3-5],因此在轉(zhuǎn)矩模式下不再以輪速為控制目標(biāo)。有學(xué)者采用通過(guò)轉(zhuǎn)矩控制將車輪滑轉(zhuǎn)率控制在估算出的目標(biāo)滑轉(zhuǎn)率上的方法[6-7],但實(shí)際運(yùn)行路況復(fù)雜,難以對(duì)目標(biāo)滑轉(zhuǎn)率進(jìn)行精確估算,并且使汽車輪胎的滑轉(zhuǎn)率值始終保持在控制算法所計(jì)算出來(lái)的滑轉(zhuǎn)率上是不現(xiàn)實(shí)的。有學(xué)者將內(nèi)外側(cè)車輪滑轉(zhuǎn)率一致作為控制目標(biāo)對(duì)電機(jī)轉(zhuǎn)矩進(jìn)行調(diào)節(jié)[8-10],但這種方法可能使轉(zhuǎn)矩調(diào)節(jié)過(guò)大,且不能實(shí)現(xiàn)小滑轉(zhuǎn)率的調(diào)節(jié)。此外,還有采用以轉(zhuǎn)向過(guò)程中整車橫擺角速度為控制目標(biāo),使實(shí)際橫擺角速度跟隨理想橫擺角速度[11],但該方法只注重考慮轉(zhuǎn)向過(guò)程的穩(wěn)定性而忽略了差速性能。據(jù)此,本文以四輪輪邊驅(qū)動(dòng)電動(dòng)客車為研究對(duì)象,采用以滑轉(zhuǎn)率為控制目標(biāo)的電子差速控制策略,依據(jù)不同轉(zhuǎn)向工況對(duì)驅(qū)動(dòng)轉(zhuǎn)矩進(jìn)行調(diào)節(jié)以降低轉(zhuǎn)向時(shí)車輪滑轉(zhuǎn)率,將驅(qū)動(dòng)輪滑轉(zhuǎn)率控制在合理的區(qū)間范圍內(nèi),并且在達(dá)到較好差速效果的同時(shí)保證轉(zhuǎn)向過(guò)程整車穩(wěn)定性,最終達(dá)到整體差速策略設(shè)計(jì)目的。
1 差速問(wèn)題分析
不管是傳統(tǒng)汽車還是電動(dòng)汽車都存在差速問(wèn)題,差速問(wèn)題主要是指4個(gè)車輪線速度不能與各自車輪的輪心速度相協(xié)調(diào),或者說(shuō)車輪滾過(guò)的距離不等于車輪輪心沿平行于行駛路面軌跡移動(dòng)的距離,引起車輪滑移或滑轉(zhuǎn),進(jìn)而導(dǎo)致功率循環(huán)或汽車不能正常行駛,即不滿足:
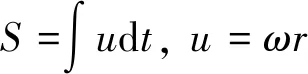
(1)
其中:u為車輪線速度;ω為車輪旋轉(zhuǎn)角速度;r為車輪滾動(dòng)半徑;S為車輪輪心沿平行于行駛路面軌跡移動(dòng)的距離。
當(dāng)各個(gè)車輪的線速度與輪心速度相等時(shí)車輪實(shí)現(xiàn)純滾動(dòng),當(dāng)線速度與輪心速度不相等時(shí)則存在差速問(wèn)題,而電子差速控制策略適用于車輛驅(qū)動(dòng)過(guò)程中,因此可以通過(guò)滑轉(zhuǎn)率來(lái)表征差速效果。根據(jù)機(jī)械差速器原理可得,良好的差速就是使得各個(gè)車輪都實(shí)現(xiàn)純滾動(dòng),滑轉(zhuǎn)率接近為0。在四輪輪邊驅(qū)動(dòng)客車上,由于取消了機(jī)械差速器,需要設(shè)計(jì)合理的電子差速器使各個(gè)車輪接近純滾動(dòng),要使車輪全部實(shí)現(xiàn)純滾動(dòng)在低速情況下是可以實(shí)現(xiàn)的,隨著車速升高、轉(zhuǎn)角增大,大部分轉(zhuǎn)向工況實(shí)際無(wú)法實(shí)現(xiàn)純滾動(dòng),因此需要研究與工況相適應(yīng)的電子差速策略,以獲得較好的差速性能和控制響應(yīng)。
2 以滑轉(zhuǎn)率為控制目標(biāo)的電子差速策略
2.1 考慮載荷轉(zhuǎn)移的轉(zhuǎn)矩分配模塊
當(dāng)汽車直線行駛時(shí),可認(rèn)為兩側(cè)驅(qū)動(dòng)輪垂直載荷相同,則對(duì)兩側(cè)驅(qū)動(dòng)轉(zhuǎn)矩采用平均分配即可。當(dāng)汽車在轉(zhuǎn)向時(shí)在離心力的作用下車輛重心會(huì)發(fā)生外移,導(dǎo)致外側(cè)車輪垂直載荷增加,內(nèi)側(cè)載荷減小,如圖1所示。
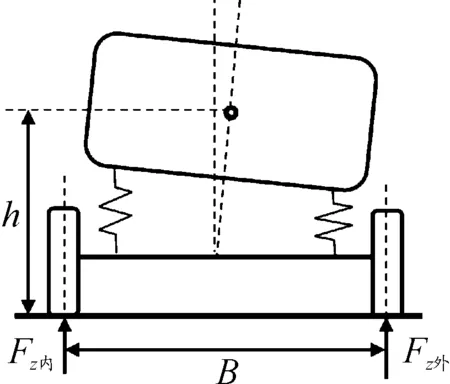
圖1 (左轉(zhuǎn))左、右側(cè)車輪垂直載荷變化示意圖
兩側(cè)車輪載荷的變化導(dǎo)致內(nèi)側(cè)車輪附著力小于外側(cè)車輪,若此時(shí)仍給兩側(cè)車輪相同驅(qū)動(dòng)轉(zhuǎn)矩,可能導(dǎo)致內(nèi)側(cè)輪突破附著極限發(fā)生打滑,因此需要對(duì)內(nèi)外側(cè)驅(qū)動(dòng)輪重新分配轉(zhuǎn)矩以降低發(fā)生滑轉(zhuǎn)的可能性。
驅(qū)動(dòng)輪的附著率Cφ是表明汽車附著性能的一個(gè)重要指標(biāo),是車輛在良好路面上行駛時(shí),在車輪不打滑情況下,能發(fā)揮最大驅(qū)動(dòng)力所要求的最低附著系數(shù),計(jì)算公式見(jiàn)式(2)。
(2)
其中:Fx為驅(qū)動(dòng)輪縱向力;Fz為驅(qū)動(dòng)輪垂直載荷。
當(dāng)汽車在良好路面上轉(zhuǎn)彎時(shí)外側(cè)車輪載荷增大而不易突破附著極限發(fā)生滑轉(zhuǎn),因此本文設(shè)計(jì)以內(nèi)側(cè)驅(qū)動(dòng)輪附著率與外側(cè)驅(qū)動(dòng)輪附著率相等為目標(biāo),對(duì)轉(zhuǎn)向時(shí)內(nèi)外側(cè)驅(qū)動(dòng)轉(zhuǎn)矩進(jìn)行重新分配,使得車輪發(fā)生滑轉(zhuǎn)的可能性降低。由此得到前、后軸內(nèi)外側(cè)車輪驅(qū)動(dòng)轉(zhuǎn)矩之比:
(3)
其中Fz1l′、Fz1r′、Fz2l′、Fz2r′分別為轉(zhuǎn)向時(shí)前左、前右、后左、后右側(cè)車輪垂直載荷。已知轉(zhuǎn)向時(shí)前、后軸兩側(cè)車輪載荷變化量分別為ΔFz1、ΔFz2,可得轉(zhuǎn)向時(shí)(左轉(zhuǎn))4個(gè)車輪的垂直載荷分別為[12]:
(4)
其中:ms為簧上質(zhì)量;mus為簧下質(zhì)量;a為質(zhì)心到前軸的距離;b為質(zhì)心到后軸的距離;L為軸距。
將式(4)及ΔFz1、ΔFz2值代入式(3)可得前軸內(nèi)外側(cè)驅(qū)動(dòng)轉(zhuǎn)矩比值:
(5)
后軸內(nèi)外側(cè)驅(qū)動(dòng)轉(zhuǎn)矩比值:
(6)
式中:u為縱向速度;h為簧上質(zhì)量質(zhì)心高度;B1為前軸軸距;B2為后軸軸距;KΦr1為前懸架側(cè)傾角剛度;KΦr2為后懸架側(cè)傾角剛度;Φr為車廂側(cè)傾角;hu為簧下質(zhì)量質(zhì)心離地面高度;θ為前輪平均轉(zhuǎn)角。
2.2 驅(qū)動(dòng)轉(zhuǎn)矩修正
隨著轉(zhuǎn)角和車速的增大,兩側(cè)車輪載荷差值也會(huì)越來(lái)越大,若按照式(5)(6)分配兩側(cè)驅(qū)動(dòng)轉(zhuǎn)矩會(huì)導(dǎo)致轉(zhuǎn)矩差值過(guò)大,對(duì)整車帶來(lái)較大的附加橫擺力矩,嚴(yán)重時(shí)會(huì)使車輛出現(xiàn)過(guò)度轉(zhuǎn)向甚至出現(xiàn)甩尾等不穩(wěn)定工況。為了防止轉(zhuǎn)向過(guò)程出現(xiàn)不穩(wěn)定工況,引入轉(zhuǎn)矩修正因子λ,修正兩側(cè)驅(qū)動(dòng)輪轉(zhuǎn)矩差,在減小車輪滑轉(zhuǎn)率的基礎(chǔ)上可以提高驅(qū)動(dòng)輪的側(cè)向附著力,以此抑制過(guò)度轉(zhuǎn)向,防止車輛出現(xiàn)甩尾的情況,保證轉(zhuǎn)向過(guò)程的穩(wěn)定性。引入修正因子λ后內(nèi)外側(cè)驅(qū)動(dòng)力矩比值為:
(7)
根據(jù)該試驗(yàn)車選取車速取值范圍0~70 km/h,車速每1 km/h取1個(gè)點(diǎn);方向盤轉(zhuǎn)角取值范圍為0°~600°,方向盤轉(zhuǎn)角每10°取1個(gè)點(diǎn)。車速取點(diǎn)71個(gè),方向盤轉(zhuǎn)角取點(diǎn)61個(gè),所覆蓋的轉(zhuǎn)向工況為4 331個(gè),確保試驗(yàn)工況的全面性。
以本文2.1節(jié)轉(zhuǎn)矩分配為依據(jù),對(duì)所取樣3 721個(gè)轉(zhuǎn)向工況進(jìn)行仿真,當(dāng)出現(xiàn)不穩(wěn)定時(shí)對(duì)該工況下內(nèi)外側(cè)驅(qū)動(dòng)轉(zhuǎn)矩比值K1、K2進(jìn)行修正,并將該修正值λ記錄下作為取樣點(diǎn)工況的轉(zhuǎn)矩修正系數(shù)。
通過(guò)對(duì)取樣工況進(jìn)行大量仿真實(shí)驗(yàn)可得到在不同車速、轉(zhuǎn)角下對(duì)應(yīng)的轉(zhuǎn)矩修正因子大小。利用Matlab建立m文件生成三維MAP圖,如圖2所示。當(dāng)策略運(yùn)算時(shí),根據(jù)當(dāng)前方向盤轉(zhuǎn)角和車速可以實(shí)時(shí)查出所需轉(zhuǎn)矩修正因子λ。
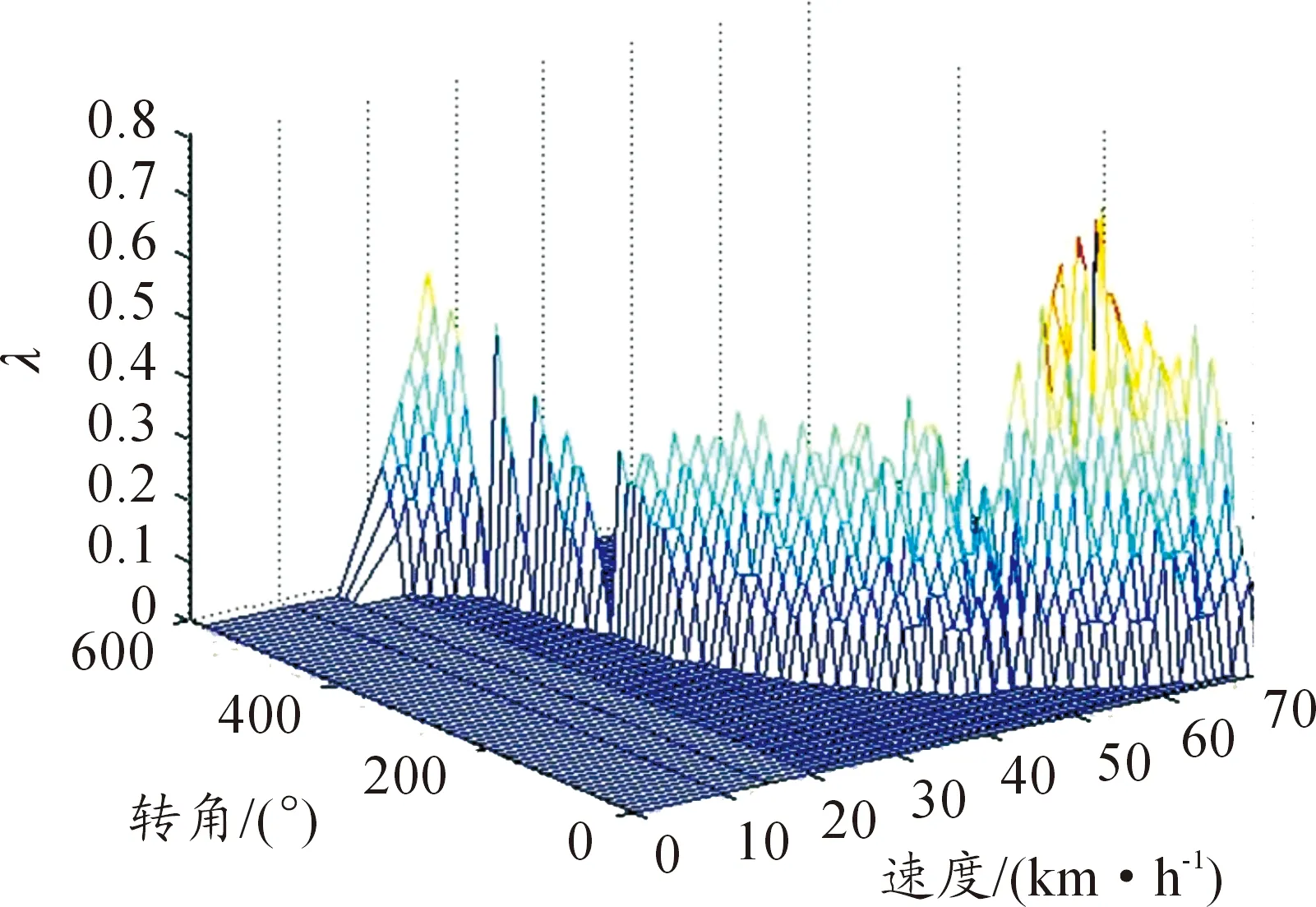
圖2 轉(zhuǎn)矩修正因子三維MAP圖
根據(jù)修正后的前后軸內(nèi)外側(cè)驅(qū)動(dòng)轉(zhuǎn)矩比值,可得內(nèi)外側(cè)轉(zhuǎn)矩差分別為:
(8)
其中:T1為前軸驅(qū)動(dòng)轉(zhuǎn)矩;T2為后軸驅(qū)動(dòng)轉(zhuǎn)矩;Td為整車期望轉(zhuǎn)矩。
4個(gè)車輪的驅(qū)動(dòng)轉(zhuǎn)矩可以表示為內(nèi)側(cè)減小轉(zhuǎn)矩差,外側(cè)增加相應(yīng)的轉(zhuǎn)矩,以保證整車總驅(qū)動(dòng)力不變。內(nèi)側(cè)車輪減小驅(qū)動(dòng)轉(zhuǎn)矩可以降低出現(xiàn)滑轉(zhuǎn)的可能性,外側(cè)車輪增加轉(zhuǎn)矩但驅(qū)動(dòng)轉(zhuǎn)矩沒(méi)有超過(guò)路面附著力時(shí)仍不會(huì)發(fā)生滑轉(zhuǎn)。因此,轉(zhuǎn)向(左轉(zhuǎn))時(shí)驅(qū)動(dòng)轉(zhuǎn)矩為:
(9)
2.3 基于PI控制的滑轉(zhuǎn)率調(diào)節(jié)模塊
當(dāng)汽車在附著系數(shù)較低路面或極限轉(zhuǎn)彎工況時(shí)車輪可能出現(xiàn)滑轉(zhuǎn)的情況,此時(shí)應(yīng)當(dāng)降低滑轉(zhuǎn)車輪驅(qū)動(dòng)轉(zhuǎn)矩。為了保證汽車在轉(zhuǎn)向時(shí)具有良好的橫向穩(wěn)定性和縱向加速性能,與前人的經(jīng)驗(yàn)相結(jié)合[13],將驅(qū)動(dòng)輪滑轉(zhuǎn)率控制在20%以下是合理的,當(dāng)滑轉(zhuǎn)率進(jìn)一步增加時(shí)會(huì)導(dǎo)致輪胎出現(xiàn)不穩(wěn)定工況。以此為依據(jù)設(shè)計(jì)基于PI控制的滑轉(zhuǎn)率調(diào)節(jié)模塊。
當(dāng)車輪滑轉(zhuǎn)率超過(guò)20%時(shí)觸發(fā)該模塊。PI控制器輸入?yún)?shù)為輪速上限ωup與當(dāng)前實(shí)時(shí)輪速ω的差值;輪速上限ωup由已知的滑轉(zhuǎn)率上限值λup、車輪半徑r、輪心速度v根據(jù)滑轉(zhuǎn)率公式計(jì)算可得;實(shí)時(shí)輪速ω由電機(jī)實(shí)時(shí)反饋可得。PI控制模塊如圖3所示。
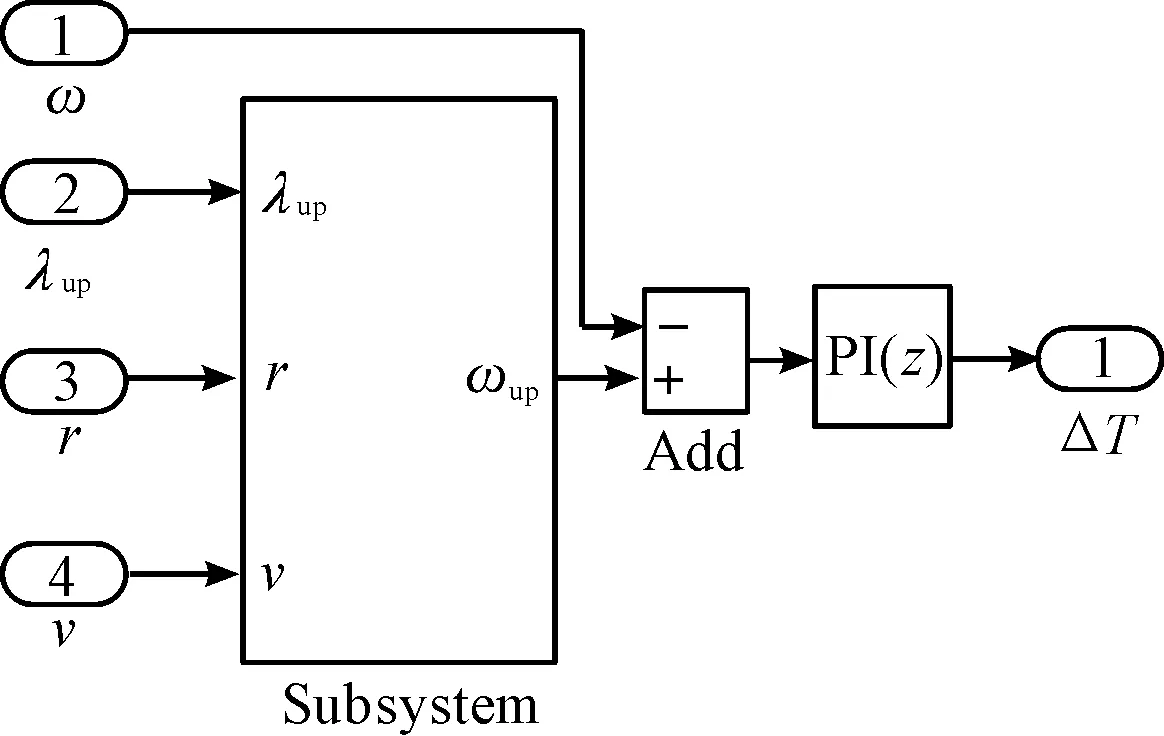
圖3 PI控制模型
PI控制器輸出參數(shù)為該車輪驅(qū)動(dòng)電機(jī)調(diào)節(jié)轉(zhuǎn)矩ΔT。PI控制器參數(shù)整定采用經(jīng)驗(yàn)法,通過(guò)多次仿真,不斷調(diào)整PI參數(shù),使得試驗(yàn)結(jié)果滿足該策略控制需求,最終取kP=100,ki=50。在電子差速控制策略中,當(dāng)監(jiān)測(cè)得到車輪滑轉(zhuǎn)率低于20%,則PI控制器輸出值為0,即滑轉(zhuǎn)率調(diào)節(jié)模塊不參與控制。當(dāng)車輪滑轉(zhuǎn)率高于20%時(shí),PI輸出相應(yīng)轉(zhuǎn)矩大小使滑轉(zhuǎn)率降低到20%以下,此時(shí)滑轉(zhuǎn)率調(diào)節(jié)模塊輸出調(diào)節(jié)轉(zhuǎn)矩ΔTt1l、ΔTt1r、ΔTt1r、ΔTt2r。根據(jù)本文2.2節(jié)所得轉(zhuǎn)矩,可得此時(shí)驅(qū)動(dòng)轉(zhuǎn)矩為:
(10)
2.4 基于滑轉(zhuǎn)率控制的電子差速實(shí)現(xiàn)流程
電子差速控制模塊整體流程如圖4所示。該策略考慮轉(zhuǎn)向過(guò)程中由于離心力的作用導(dǎo)致內(nèi)外側(cè)載荷的重新分配,以兩側(cè)驅(qū)動(dòng)輪附著率相等為目標(biāo)對(duì)驅(qū)動(dòng)轉(zhuǎn)矩進(jìn)行重新分配,使得車輪發(fā)生滑轉(zhuǎn)的可能性降低。首先計(jì)算出轉(zhuǎn)向過(guò)程中各車輪垂直載荷,分配左右側(cè)驅(qū)動(dòng)轉(zhuǎn)矩比值K1和K2,考慮轉(zhuǎn)向過(guò)程中整車的穩(wěn)定性,防止車輛出現(xiàn)過(guò)度橫擺的情況,對(duì)兩側(cè)車輪驅(qū)動(dòng)轉(zhuǎn)矩比進(jìn)行修正得到修正后的左右側(cè)驅(qū)動(dòng)轉(zhuǎn)矩比K1′和K2′,此外滑轉(zhuǎn)率調(diào)節(jié)模塊對(duì)車輪實(shí)時(shí)滑轉(zhuǎn)率進(jìn)行監(jiān)測(cè),當(dāng)滑轉(zhuǎn)率超出所設(shè)定上限值時(shí)電機(jī)驅(qū)動(dòng)轉(zhuǎn)矩為經(jīng)滑轉(zhuǎn)率調(diào)節(jié)模塊計(jì)算得到的Tt1l′、Tt1r′、Tt2l′、Tt2r′,若滑轉(zhuǎn)率未達(dá)到上限值,驅(qū)動(dòng)電機(jī)轉(zhuǎn)矩輸出為Tt1l、Tt1r、Tt2l、Tt2r。
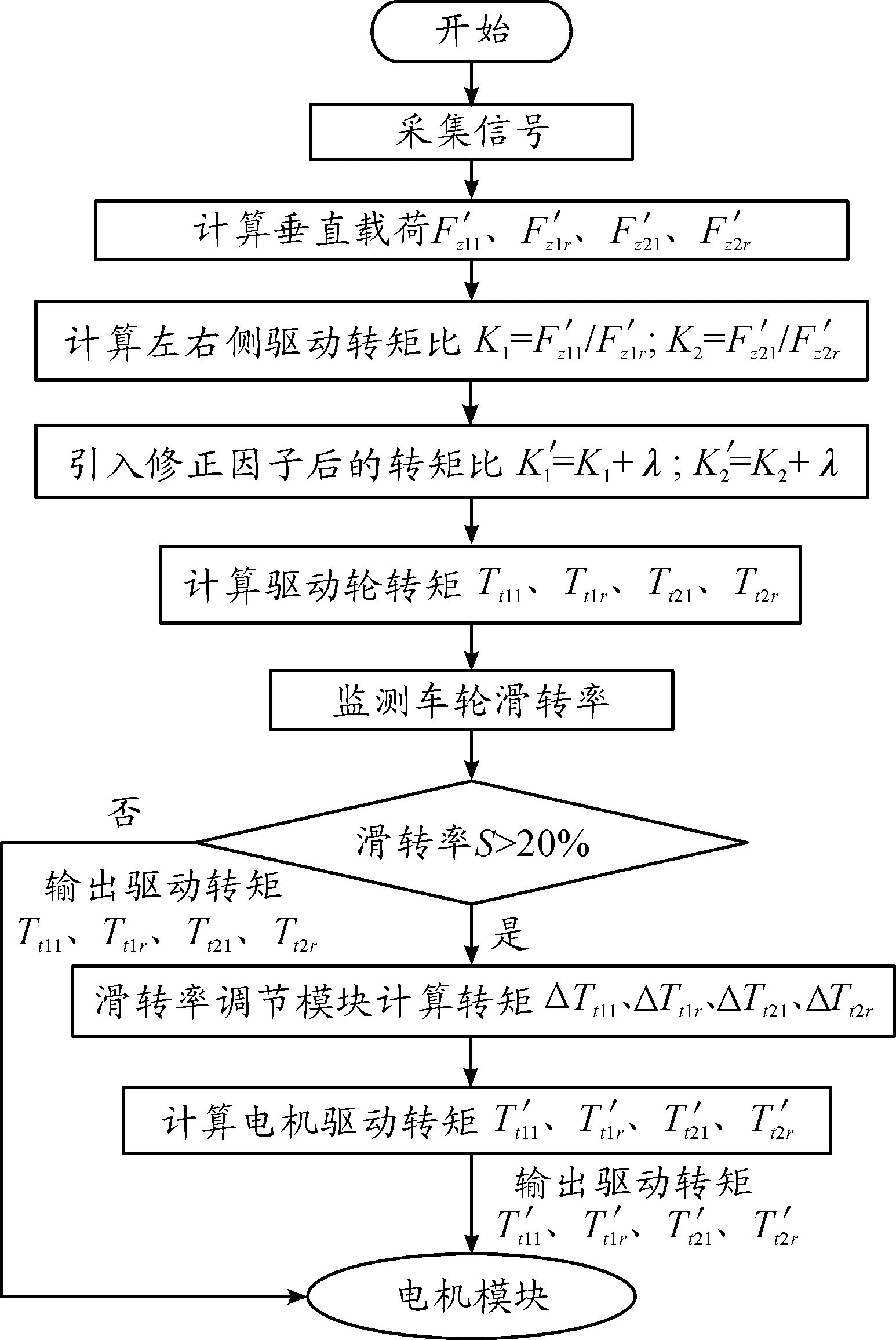
圖4 電子差速控制策略流程
3 電子差速仿真與分析
3.1 仿真模型建立
選擇動(dòng)力學(xué)仿真軟件Carsim建立整車動(dòng)力學(xué)模型,由于Carsim軟件無(wú)電動(dòng)汽車模型,因此建立Carsim/Simulink聯(lián)合仿真電動(dòng)汽車模型[14]。
本文研究的車型為某四輪輪邊驅(qū)動(dòng)電動(dòng)公交車,整車基本參數(shù)如表1所示。
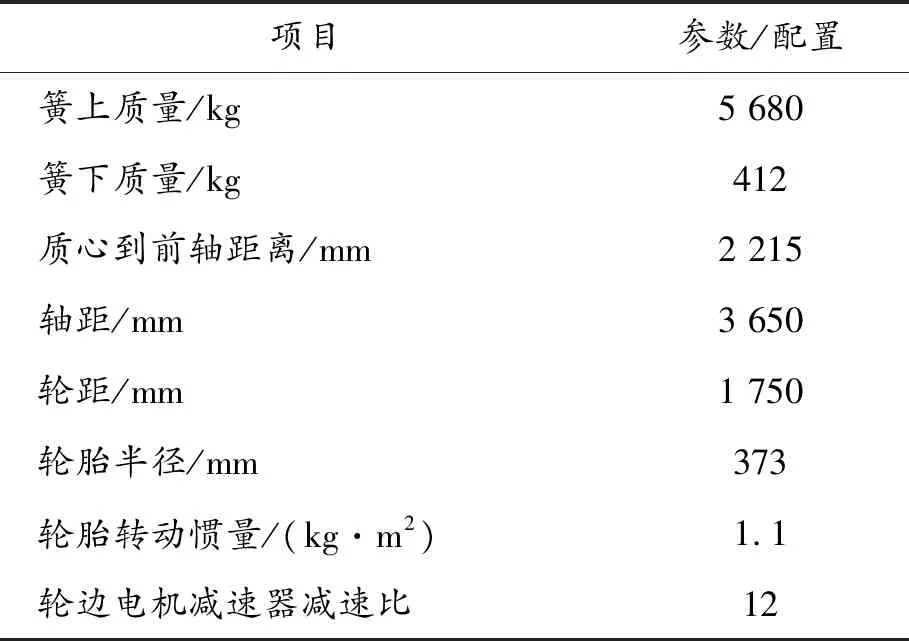
表1 整車仿真參數(shù)
3.2 電子差速仿真結(jié)果
為了驗(yàn)證本文電子差速控制策略,在基于Carsim/Simulink搭建的聯(lián)合仿真平臺(tái)進(jìn)行轉(zhuǎn)彎工況仿真,并將有電子差速策略仿真結(jié)果與無(wú)電子差速策略仿真結(jié)果進(jìn)行對(duì)比,無(wú)策略時(shí)將期望轉(zhuǎn)矩平均分到兩側(cè)驅(qū)動(dòng)車輪,前后軸轉(zhuǎn)矩則與電子差速控制策略采用相同的分配方法。
3.2.1 高速小轉(zhuǎn)向工況
方向盤轉(zhuǎn)角在4 s內(nèi)由0°增大到120°(左轉(zhuǎn)),駕駛員加速踏板輸入維持車速50 km/h。電子差速策略與無(wú)策略驅(qū)動(dòng)轉(zhuǎn)矩對(duì)比如圖5所示,內(nèi)側(cè)車輪滑轉(zhuǎn)率對(duì)比如圖6所示,橫擺角速度對(duì)比如圖7所示。
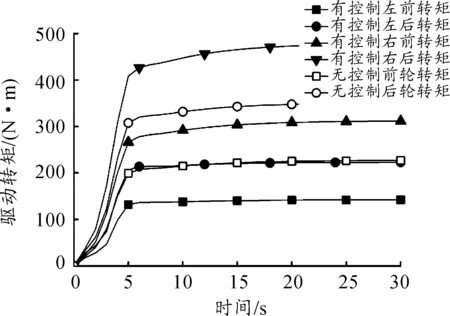
圖5 高速小轉(zhuǎn)向驅(qū)動(dòng)轉(zhuǎn)矩對(duì)比
3.2.2 中速中轉(zhuǎn)向
方向盤轉(zhuǎn)角在6 s內(nèi)由0°增大到280°(左轉(zhuǎn)),駕駛員加速踏板輸入維持車速35 km/h。電子差速策略與無(wú)策略驅(qū)動(dòng)轉(zhuǎn)矩對(duì)比如圖8所示,內(nèi)側(cè)車輪滑轉(zhuǎn)率對(duì)比如圖9所示,橫擺角速度對(duì)比如圖10所示。
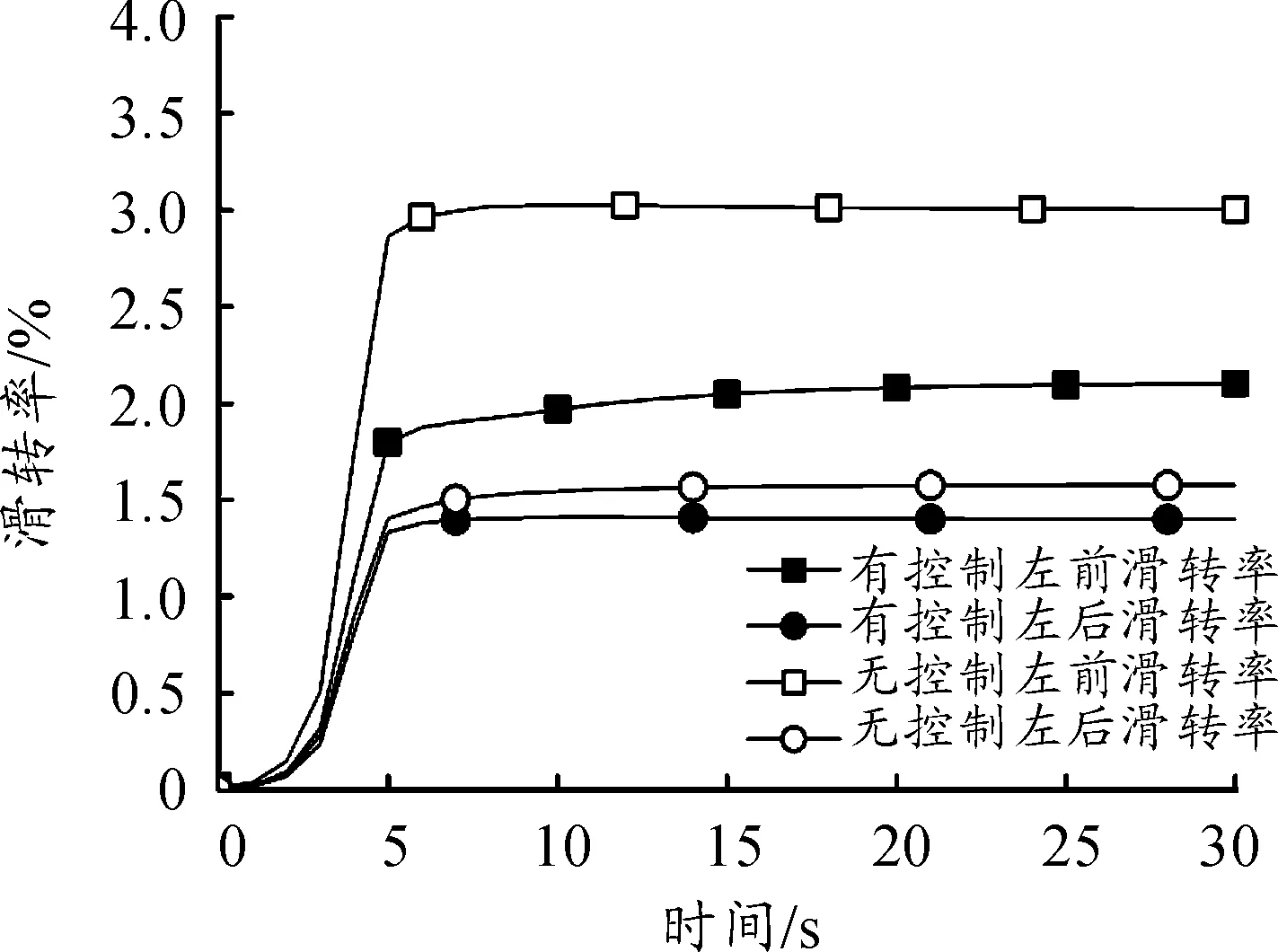
圖6 高速小轉(zhuǎn)向內(nèi)側(cè)車輪滑轉(zhuǎn)率對(duì)比
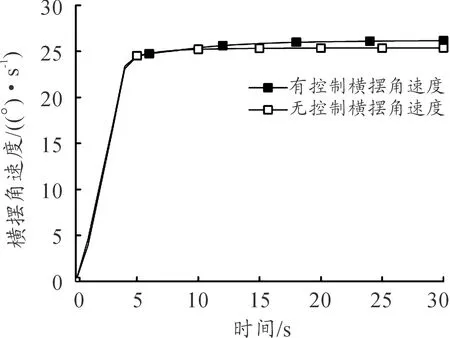
圖7 高速小轉(zhuǎn)向橫擺角速度對(duì)比
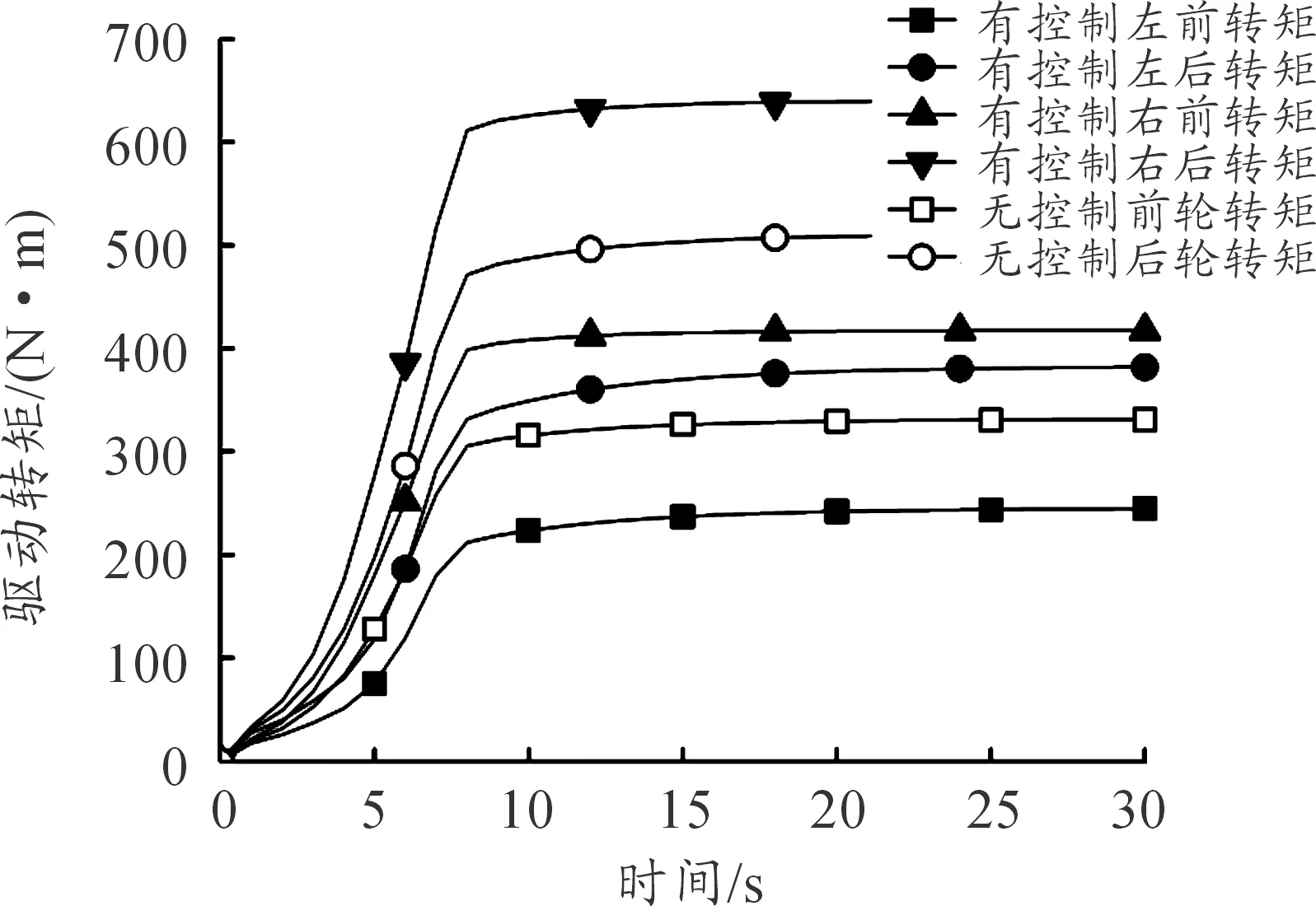
圖8 中速中轉(zhuǎn)向驅(qū)動(dòng)轉(zhuǎn)矩對(duì)比
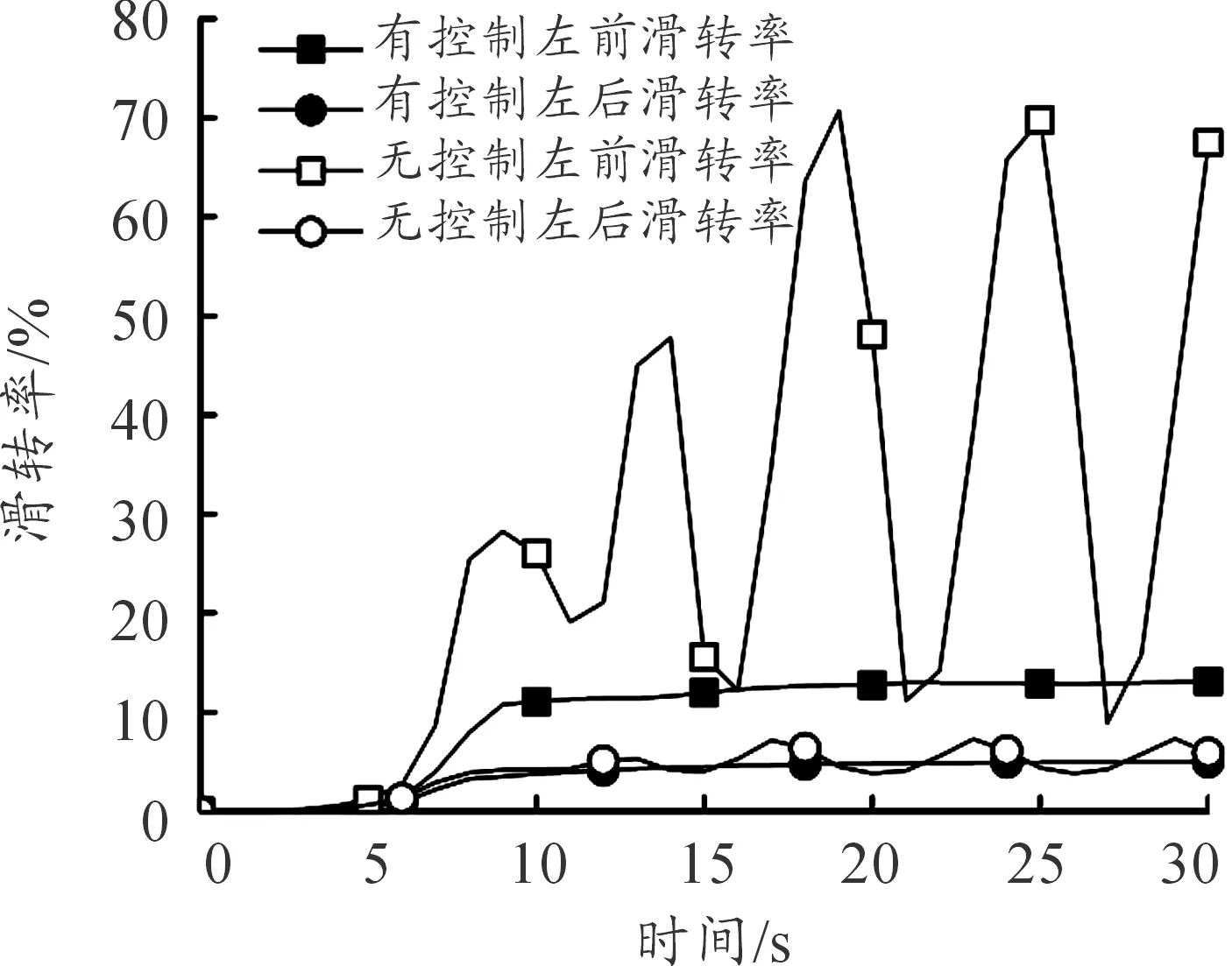
圖9 中速中轉(zhuǎn)向內(nèi)側(cè)車輪滑轉(zhuǎn)率對(duì)比
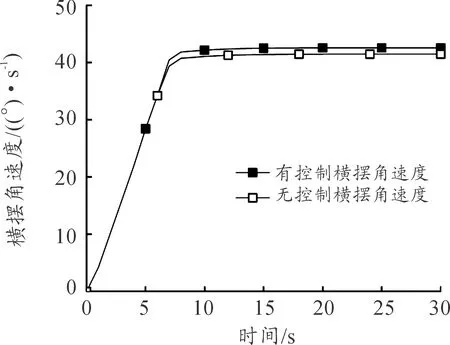
圖10 中速中轉(zhuǎn)向橫擺角速度對(duì)比
3.2.3 低速大轉(zhuǎn)向
方向盤轉(zhuǎn)角在6 s內(nèi)由0°增大到580°(左轉(zhuǎn)),駕駛員加速踏板輸入維持車速2 5 km/h。電子差速策略與無(wú)策略驅(qū)動(dòng)轉(zhuǎn)矩對(duì)比如圖11所示,內(nèi)側(cè)車輪滑轉(zhuǎn)率對(duì)比如圖12所示,橫擺角速度對(duì)比如圖13所示。
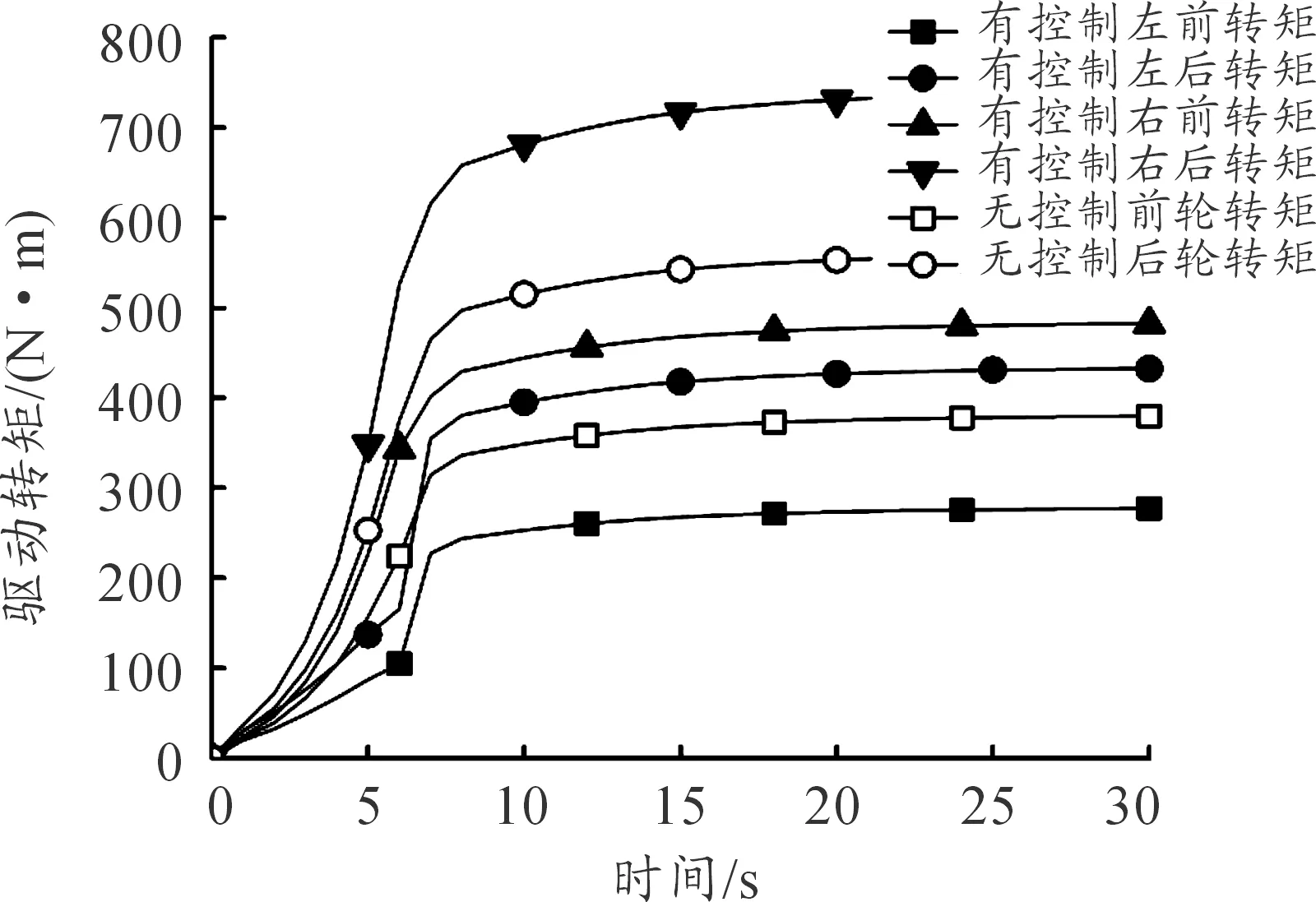
圖11 低速大轉(zhuǎn)向驅(qū)動(dòng)轉(zhuǎn)矩對(duì)比
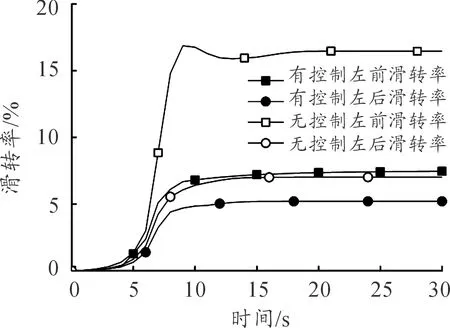
圖12 低速大轉(zhuǎn)向內(nèi)側(cè)車輪滑轉(zhuǎn)率對(duì)比
3.2.4 仿真結(jié)果分析
根據(jù)仿真結(jié)果可以看出:當(dāng)方向盤從0°逐漸增大時(shí),內(nèi)側(cè)車輪驅(qū)動(dòng)轉(zhuǎn)矩減小,外側(cè)車輪驅(qū)動(dòng)轉(zhuǎn)矩增加,直到方向盤轉(zhuǎn)角穩(wěn)定,驅(qū)動(dòng)轉(zhuǎn)矩也趨于穩(wěn)定。由車輪滑轉(zhuǎn)率可以看出,采用電子差速策略的車輪內(nèi)側(cè)滑轉(zhuǎn)率相較于無(wú)策略車輪滑轉(zhuǎn)率都有下降:高速小轉(zhuǎn)向工況中滑轉(zhuǎn)率從3%下降到1.5%,中速中轉(zhuǎn)向工況中滑轉(zhuǎn)率從70%下降到10%,低速大轉(zhuǎn)向工況中滑轉(zhuǎn)率從16%下降到6%。3個(gè)轉(zhuǎn)向工況中采用電子差速策略的橫擺角速度與無(wú)策略橫擺角速度偏差較小,最大偏差為3(°)/s,說(shuō)明本文研究的電子差速策略能夠降低車輪轉(zhuǎn)彎過(guò)程中的滑轉(zhuǎn)率,并且在車輪出現(xiàn)較嚴(yán)重滑轉(zhuǎn)率時(shí)通過(guò)調(diào)節(jié)轉(zhuǎn)矩將滑轉(zhuǎn)率控制在期望值以內(nèi),且在轉(zhuǎn)向過(guò)程中車輛并未出現(xiàn)過(guò)度橫擺的情況。以上結(jié)果說(shuō)明,該策略能保證車輛轉(zhuǎn)彎過(guò)程具有較好的差速效果、橫向穩(wěn)定性和縱向加速性能。
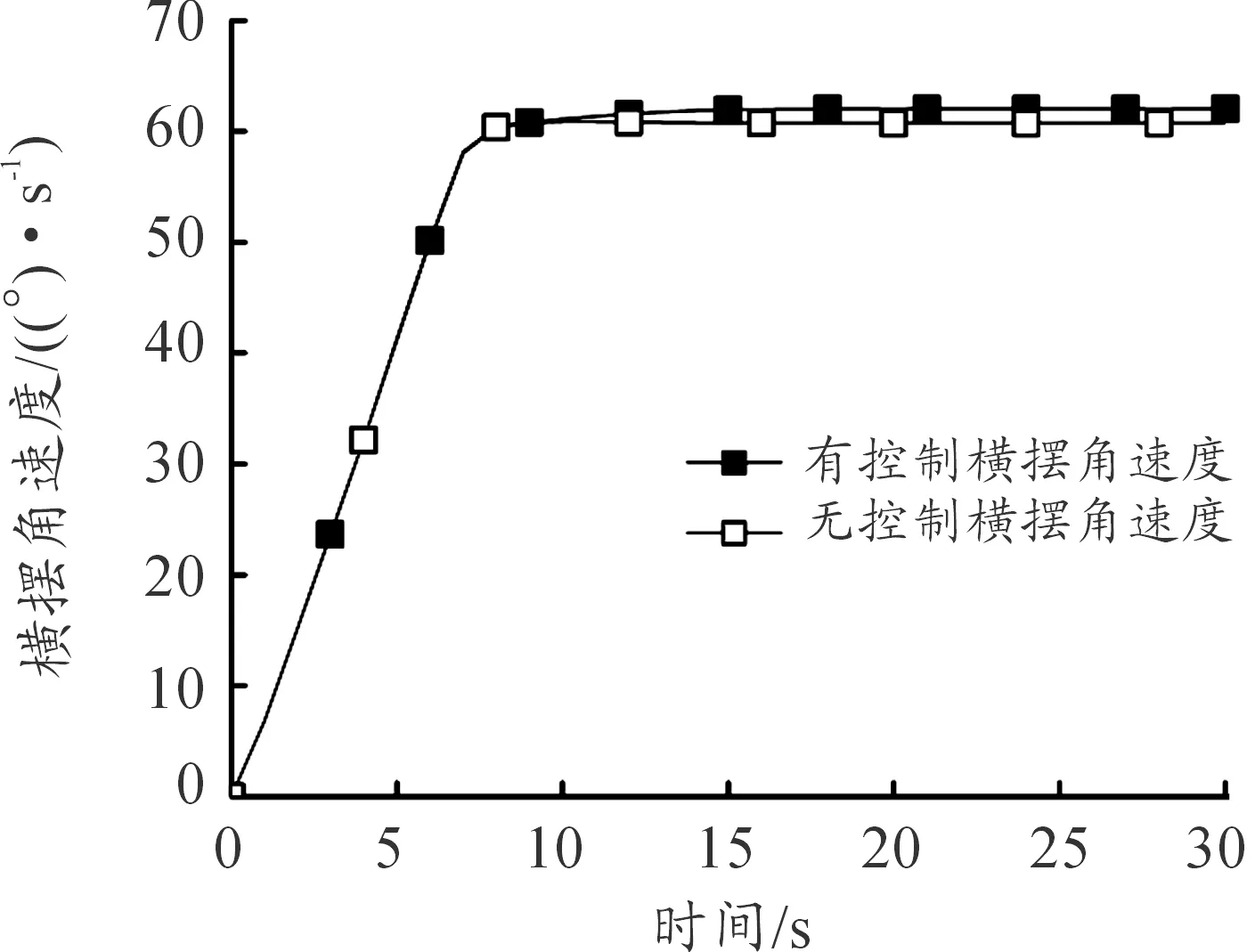
圖13 低速大轉(zhuǎn)向橫擺角速度對(duì)比
4 硬件在環(huán)試驗(yàn)
對(duì)電子差速控制系統(tǒng)進(jìn)行離線仿真驗(yàn)證之后,進(jìn)一步進(jìn)行硬件在環(huán)仿真驗(yàn)證。本文的硬件在環(huán)實(shí)驗(yàn)平臺(tái)由dSPACE1005、dSPACE1104以及搭載Infineon-TriCore芯片的整車控制器組成,試驗(yàn)設(shè)備如圖14所示。其中整車控制器中包括電子差速控制系統(tǒng),dSPACE1005作為整車模型部分,dSPACE1104作為汽車駕駛員部分。半實(shí)物仿真試驗(yàn)流程如下:駕駛員操作指令和整車狀態(tài)參數(shù)分別通過(guò)dSPACE1104、dSPACE1005發(fā)送到整車控制器,整車控制器根據(jù)電子差速控制策略計(jì)算出當(dāng)前所需指令驅(qū)動(dòng)轉(zhuǎn)矩,并將該轉(zhuǎn)矩返回到整車模型作為輸入量驅(qū)動(dòng)車輛,同時(shí)整車狀態(tài)參數(shù)返回到整車控制器等待下一指令。
通過(guò)ControlDesk對(duì)硬件在環(huán)試驗(yàn)過(guò)程中相關(guān)參數(shù)進(jìn)行實(shí)時(shí)監(jiān)測(cè),包括加速踏板開(kāi)度、車速、滑轉(zhuǎn)率、驅(qū)動(dòng)轉(zhuǎn)矩、橫擺角速度等參數(shù)。
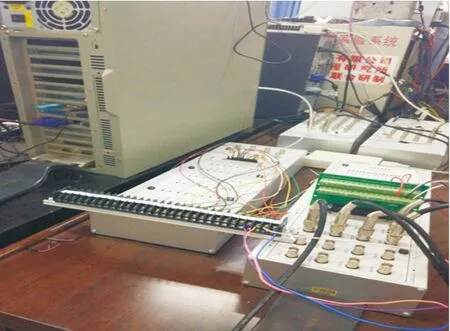
圖14 硬件在環(huán)試驗(yàn)平臺(tái)
選擇變速轉(zhuǎn)向工況仿真工況,車輛從靜止開(kāi)始加速,駕駛員加速踏板始終保持在恒定40%開(kāi)度,車速由0逐漸增加,方向盤轉(zhuǎn)角在6 s內(nèi)由0°增大到150°。將相同轉(zhuǎn)向工況進(jìn)行離線仿真和硬件在環(huán)實(shí)驗(yàn)仿真,并將試驗(yàn)結(jié)果進(jìn)行對(duì)比,離線仿真與硬件在環(huán)試驗(yàn)車速對(duì)比如圖15所示,車輪驅(qū)動(dòng)轉(zhuǎn)矩對(duì)比如圖16、17所示。
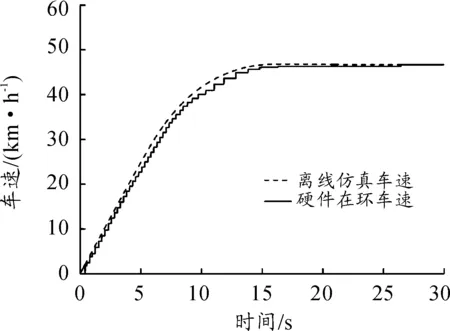
圖15 離線仿真與硬件在環(huán)試驗(yàn)車速對(duì)比
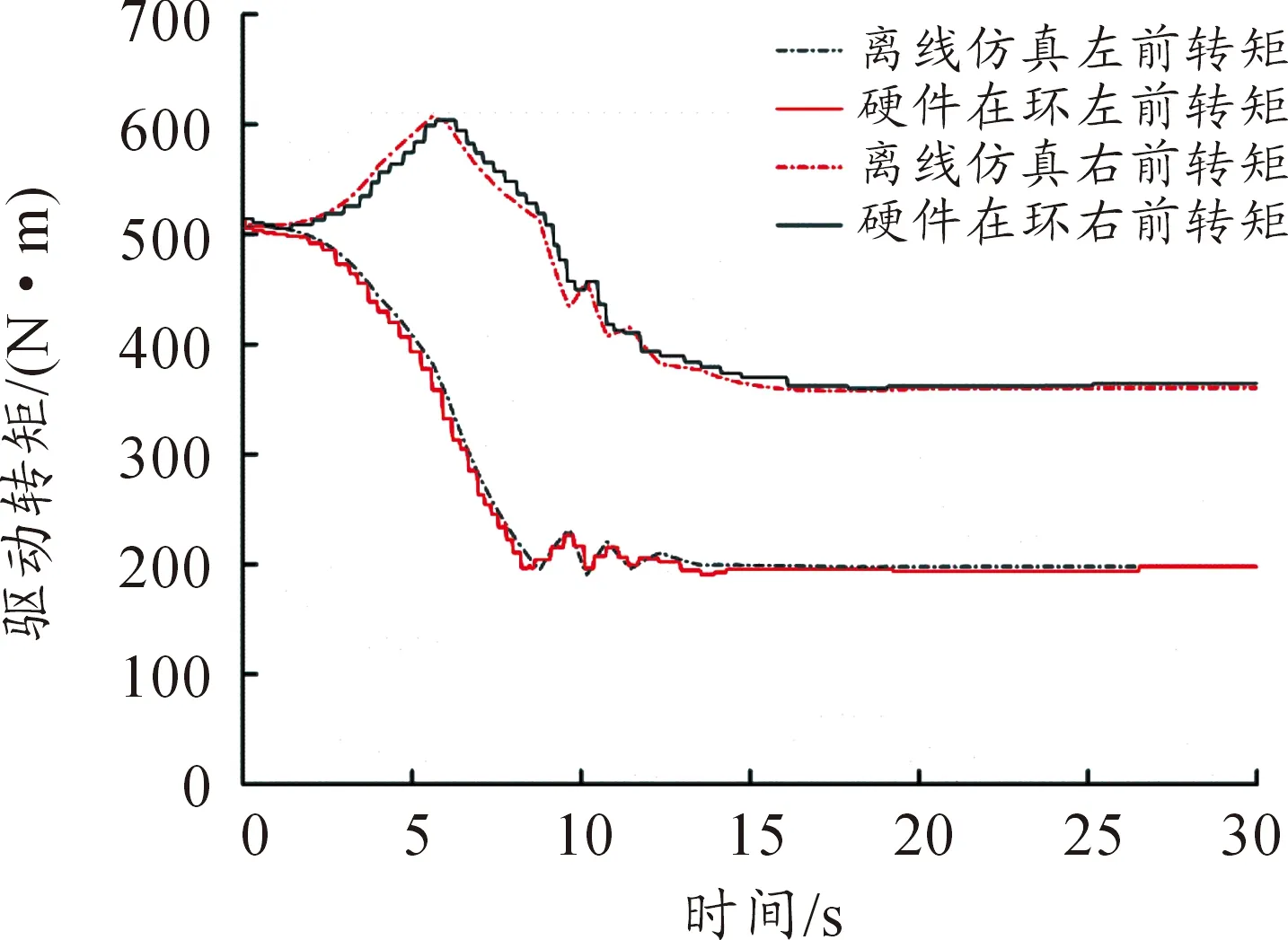
圖16 離線仿真與硬件在環(huán)試驗(yàn)前輪驅(qū)動(dòng)轉(zhuǎn)矩對(duì)比
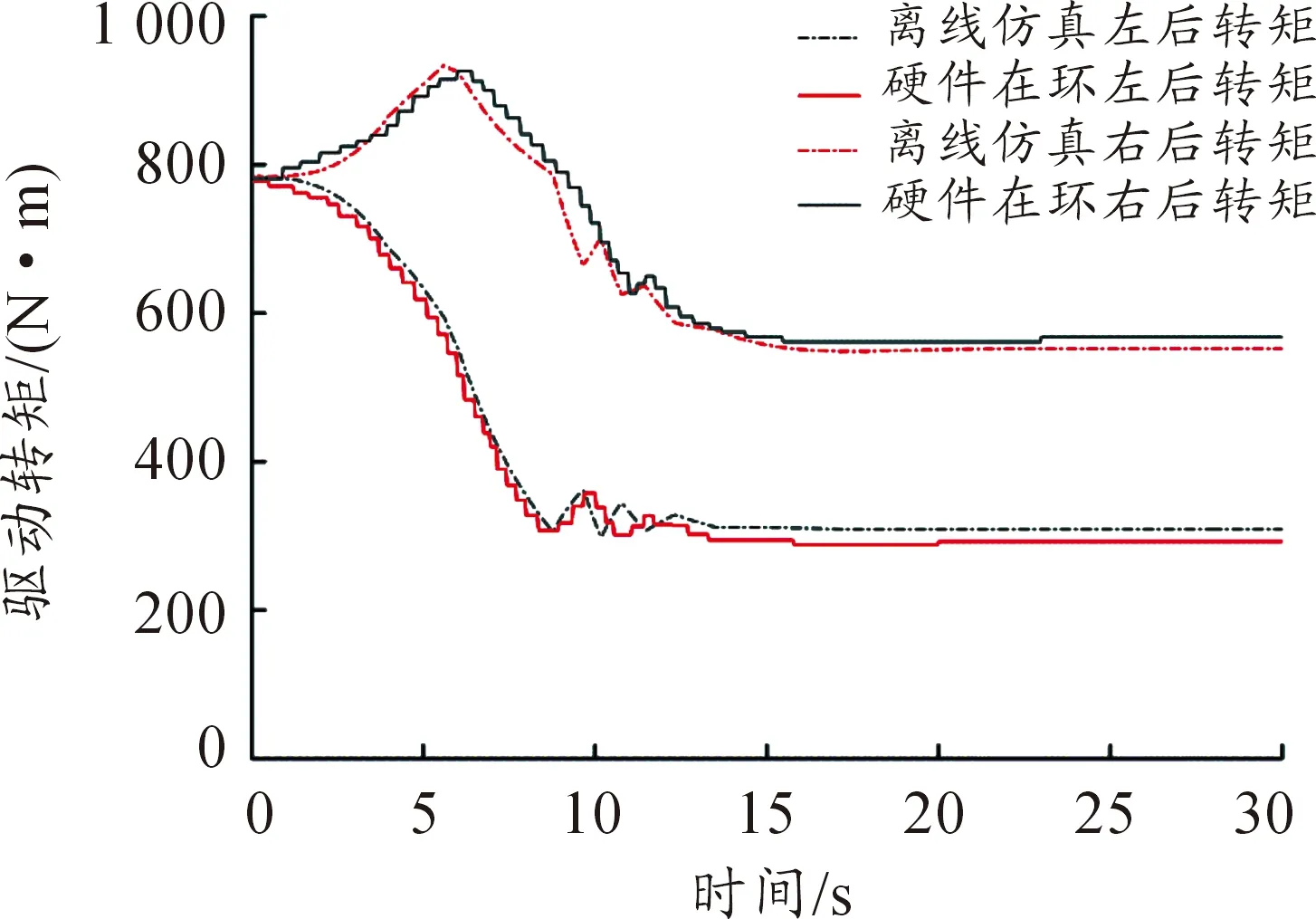
圖17 離線仿真與硬件在環(huán)試驗(yàn)后輪驅(qū)動(dòng)轉(zhuǎn)矩對(duì)比
根據(jù)圖15~17可以看出:離線仿真結(jié)果與硬件在環(huán)仿真結(jié)果基本一致。硬件在環(huán)整車車速與離線仿真整車車速程相同趨勢(shì)增加,且最終數(shù)值基本相同。硬件在環(huán)仿真對(duì)4個(gè)車輪驅(qū)動(dòng)轉(zhuǎn)矩分配情況與離線仿真時(shí)基本吻合,不僅從理論上設(shè)計(jì)了電子差速控制策略,而且驗(yàn)證了控制策略的可靠性。
5 結(jié)束語(yǔ)
針對(duì)分布式驅(qū)動(dòng)車輛在轉(zhuǎn)彎過(guò)程中的驅(qū)動(dòng)輪差速控制進(jìn)行研究,以四輪輪邊驅(qū)動(dòng)客車為研究對(duì)象,提出了一種以滑轉(zhuǎn)率為控制目標(biāo)的電子差速控制策略。該策略考慮轉(zhuǎn)向過(guò)程中整車的差速效果,同時(shí)兼顧轉(zhuǎn)向過(guò)程的穩(wěn)定性。
建立控制策略模型,使用Matlab/Simulink和Carsim軟件進(jìn)行聯(lián)合仿真,在不同車速下進(jìn)行不同角度方向盤角階躍輸入。仿真結(jié)果表明:該電子差速策略能夠在多種轉(zhuǎn)向工況下有效地降低車輪滑轉(zhuǎn)率,使車輪滑轉(zhuǎn)率始終控制在合理的區(qū)間范圍內(nèi),使整車具有較好的差速效果和橫向穩(wěn)定性,達(dá)到了整體差速設(shè)計(jì)目的。
在硬件在環(huán)試驗(yàn)平臺(tái)上進(jìn)行轉(zhuǎn)彎工況仿真,發(fā)現(xiàn)硬件在環(huán)仿真結(jié)果與離線仿真結(jié)果基本一致,為接下來(lái)實(shí)車搭載該策略奠定了良好基礎(chǔ),為將該控制策略進(jìn)行產(chǎn)品化提供了可能。
猜你喜歡
教學(xué)考試(高考化學(xué))(2021年2期)2021-05-30 06:15:52
能源工程(2020年6期)2021-01-26 00:55:22
中學(xué)生數(shù)理化·高一版(2020年3期)2020-04-21 08:03:20
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學(xué)生作文(低年級(jí)適用)(2019年9期)2019-10-08 08:37:10
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
數(shù)學(xué)大世界(2018年1期)2018-04-12 05:39:14
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24