基于粒子群優(yōu)化的DGM(1,1)模型在基坑變形安全預(yù)測中的研究*
2019-04-12 05:28:54陳家騏華建兵段園煜司大雄丁碧瑩
中國安全生產(chǎn)科學(xué)技術(shù) 2019年3期
關(guān)鍵詞:模型
陳家騏,華建兵,段園煜,司大雄,丁 蕾,丁碧瑩
(合肥學(xué)院 建筑工程系,安徽 合肥 230601)
0 引言
基坑變形預(yù)測是工程監(jiān)測中非常重要的內(nèi)容之一。變形預(yù)測可以讓施工人員根據(jù)現(xiàn)有監(jiān)測數(shù)據(jù),預(yù)測到未來可能發(fā)生的問題,及時制定措施保證工程安全進(jìn)行。因此,進(jìn)行基坑變形預(yù)測尤為重要。比較常見的預(yù)測方法如遺傳算法、BP神經(jīng)網(wǎng)絡(luò)和支持向量機(jī)等[1-6],但所需樣本較多,而離散灰色預(yù)測模型DGM(1,1)具有所需樣本總量少、模型簡單易于計算等特征,已經(jīng)被廣泛用于基坑變形預(yù)測中。實際工程應(yīng)用中,由于模型本身一些缺陷,如背景值和初始值確定方法等,經(jīng)常會出現(xiàn)預(yù)測精度不足的情況。許多研究人員從構(gòu)造模型本身參數(shù)出發(fā),利用粒子群算法對模型進(jìn)行優(yōu)化[7-8]。然而,將原始數(shù)據(jù)利用變權(quán)緩沖算子結(jié)合粒子群算法進(jìn)行降噪處理的優(yōu)化方法卻少有研究。除此之外,許多利用粒子群算法優(yōu)化灰色模型的研究中,只用平均相對誤差和均方差等單一函數(shù)作為適應(yīng)度函數(shù)對模型參數(shù)進(jìn)行優(yōu)化[9-10],不同目標(biāo)適應(yīng)度函數(shù)對模型參數(shù)優(yōu)化影響的研究也比較少見。
對此,本文提出1種基于粒子群算法優(yōu)化的變權(quán)離散灰色預(yù)測模型,稱為PSO-VWDGM(1,1)模型。利用變權(quán)緩沖算子和粒子群算法對原始序列進(jìn)行降噪處理,提高原始序列的光滑度,從而提高預(yù)測精度。利用相對誤差檢驗、后驗差比檢驗、灰色絕對關(guān)聯(lián)度檢驗3種精度檢驗方法作為粒子群算法目標(biāo)適應(yīng)度函數(shù)建立模型,研究不同目標(biāo)適應(yīng)度函數(shù)對模型參數(shù)優(yōu)化的影響。研究成果在基坑變形安全評估、預(yù)警方面具有應(yīng)用價值。
1 灰色預(yù)測模型
1.1 離散灰色預(yù)測模型
定義1[11]:設(shè)序列X(0)={x(0)(1),x(0)(2),…,x(0)(n)},其中x(0)(k)≥0,k=1,2,…,n,則稱X(1)={x(1)(1),x(1)(2),…,x(1)(n)}為序列X(0)的一次累加生成序列,其中:
(1)
定義2[12]:設(shè)序列X(0),X(1)如定義1所述,則稱:
x(1)(k+1)=β1x(1)(k)+β2
(2)
為離散灰色預(yù)測模型DGM(1,1),其中β1,β2為估計參數(shù)。
對式(2)使用最小二乘法,則離散灰色預(yù)測模型的估計參數(shù)β1,β2滿足:
(3)
其中:
(4)

k=1,2,…,n-1
(5)
1.2 變權(quán)弱化緩沖算子
定理3[13]:設(shè)X=(x(1),x(2),…,x(n))為非負(fù)的系統(tǒng)行為數(shù)據(jù)序列,令:
XD1=(x(1)d1,x(2)d1,…,x(n)d1)
(6)
其中:
x(k)d1=λx(n)+(1-λ)x(k)
(7)
式中:λ為可變權(quán)重,0<λ<1;k=1,2,…,n。當(dāng)X為單調(diào)增長序列、單調(diào)遞減序列或震蕩序列時,稱D1為變權(quán)弱化緩沖算子。
1.3 精度檢驗[14]
1)平均相對誤差a
(8)
2)后驗差比C
C=S2/S1
(9)
式中:εs(u)為預(yù)測值和擬合值的殘差;S1為原始序列的標(biāo)準(zhǔn)差;S2為擬合序列與原始序列殘差序列的標(biāo)準(zhǔn)差。
3)灰色絕對關(guān)聯(lián)度
(10)
(11)
(12)
式中:s0和s1分別為原始數(shù)據(jù)和擬合數(shù)據(jù)的灰色絕對關(guān)聯(lián)度計算參數(shù)。灰色模型精度等級如表1所示。
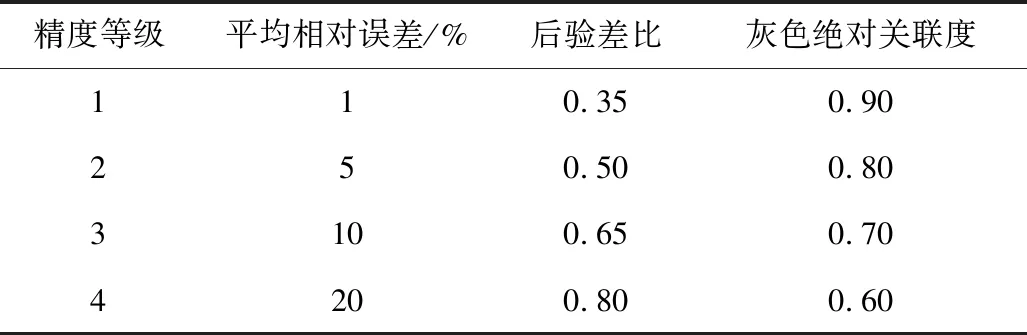
表1 灰色模型精度等級Table 1 Gray model precision grade
1.4 多種緩沖算子的優(yōu)化模型
為了解決系統(tǒng)由于外界沖擊擾動而導(dǎo)致數(shù)據(jù)離亂的問題,劉思峰等[13]提出沖擊擾動系統(tǒng)和緩沖算子的概念, 并構(gòu)造出平均弱化緩沖算子;黨耀國[13]構(gòu)造了幾何平均弱化緩沖算子、加權(quán)平均弱化緩沖算子、加權(quán)幾何平均弱化緩沖算子等具有普遍意義的實用算子。上述幾種緩沖算子均能有效改進(jìn)優(yōu)化灰色模型,有效解決定量研究結(jié)果與定性分析結(jié)論不符的問題。但是上述緩沖算子在實際運用時, 往往難以得到令人滿意的效果。因為傳統(tǒng)緩沖算子不能實現(xiàn)作用強(qiáng)度微調(diào), 導(dǎo)致緩沖作用效果過強(qiáng)或過弱,難以還原數(shù)據(jù)本來面目。王正新等[14]提出的變權(quán)緩沖算子通過多種數(shù)學(xué)算法測算并調(diào)整可變權(quán)重的大小來控制緩沖算子作用強(qiáng)度,可以更精準(zhǔn)地還原數(shù)據(jù)本來面目。智能數(shù)學(xué)算法中的粒子群算法同遺傳算法相比,更加容易實現(xiàn),且沒有許多需要調(diào)整的參數(shù),具有計算速度快、收斂速度快的特點。運用粒子群算法定量測算變權(quán)緩沖算子可變權(quán)重可以快速準(zhǔn)確得到最優(yōu)權(quán)重,并運用多種精度檢驗函數(shù)作為粒子群算法的適應(yīng)度參數(shù)函數(shù),研究測算可變權(quán)重時的最優(yōu)函數(shù)問題。
2 粒子群算法優(yōu)化的灰色模型
2.1 粒子群算法原理
假設(shè)在D維空間中有m個粒子,粒子i在D維空間的位置向量為xi=(xi1,xi2,…,xiD),粒子i在D維空間的速度向量為vi=(vi1,vi2,…,viD)。將粒子的空間位置向量帶入目標(biāo)函數(shù)f(x)求得適應(yīng)度值,根據(jù)適應(yīng)度最大或最小準(zhǔn)則判斷該位置是否為最優(yōu)位置。個體粒子i飛過歷史最好位置為pi=(pi1,pi2,…,piD),群體中所有粒子飛過的最好位置為pg=(pg1,pg2,…,pgD)[15]。粒子群算法中的粒子速度和位置按如下公式進(jìn)行更新。
速度更新公式:
(13)
位置更新公式:
xiD(t+1)=xiD(t)+viD(t+1)
(14)
式中:t為迭代次數(shù);viD為第i(i=1,2,…,m)個粒子在第D維空間的速度,m/s;xiD為第i個粒子在第D維空間的位置,m;piD(t)代表第i個粒子在第D維中迭代t次時最好的位置,m;pgD(t)代表粒子種群在第D維空間中迭代t次時最好位置,m;ω為慣性權(quán)重;c1為自我學(xué)習(xí)因子;c2為群體學(xué)習(xí)因子;r1,r2為[0,1]區(qū)間內(nèi)的隨機(jī)數(shù)。
2.2 基于粒子群算法的建模過程及參數(shù)設(shè)置
建模過程如下:
1)初始化設(shè)置:慣性權(quán)重w一般取0.8;學(xué)習(xí)因子c1,c2在0~4之間,一般跟自變量的取值范圍有關(guān),取c1=c2=0.5;迭代次數(shù)t取值過大會導(dǎo)致計算變慢,過小導(dǎo)致計算精度不足,取t=30;PSO-VWDGM(1,1)模型中待優(yōu)化參數(shù)λ作為一維空間種群中的個體粒子,初始種群的粒子個數(shù)取i=50;初始粒子的速度vi及位置xi采用隨機(jī)數(shù)函數(shù)給出,由于待定參數(shù)λ的取值范圍在0~1區(qū)間內(nèi),所以位置xi的取值范圍限制在[0,1];為防止粒子飛行速度過快而飛出限制范圍,速度vi取[-1,1]。
2)適應(yīng)度值計算:利用式(8)~(10)3種函數(shù)作為粒子群算法的目標(biāo)適應(yīng)度函數(shù)分別計算適應(yīng)度值。
3)個體極值與全局最優(yōu)解:將隨機(jī)生成的初始種群粒子λ帶入PSO-VWDGM(1,1)模型進(jìn)行適應(yīng)度值計算,并采用式(14)和(15)更新粒子的速度和位置。個體極值為每個粒子找到的歷史上最優(yōu)的位置信息pbest,并從這些個體歷史最優(yōu)解中找到1個全局最優(yōu)解gbest,與歷史最優(yōu)解比較,選出最佳的粒子λ作為當(dāng)前的歷史最優(yōu)解。
4)循環(huán)迭代計算:根據(jù)式(13)和(14)判斷目標(biāo)適應(yīng)度函數(shù)值是否滿足要求,如不滿足要求則繼續(xù)迭代計算至滿足最優(yōu)準(zhǔn)則或最大迭代次數(shù)。
5)計算結(jié)束:計算結(jié)束后得到預(yù)測模型最優(yōu)參數(shù)λ。
6)預(yù)測模型建立:使用求得的最優(yōu)參數(shù)λ構(gòu)造PSO-VWDGM(1,1)模型,并利用該模型進(jìn)行預(yù)測。
3 應(yīng)用實例
安徽省合肥市云谷路地鐵車站位于云谷路和廬州大道的交叉口。基坑采用明挖順筑法施工,該基坑共有4個立柱用于支撐混凝土,每個立柱頂部設(shè)立1個沉降觀測點,點號為LZ1~LZ4。選取LZ4測點4月17日—26日的沉降數(shù)據(jù),建立DGM(1,1)模型,用平均相對誤差、后驗差比和灰色絕對關(guān)聯(lián)度為粒子群算法目標(biāo)適應(yīng)度函數(shù)建立3個PSO-VWDGM(1,1)模型。設(shè)上述4種模型分別為1號、2號、3號和4號模型。其中前6 d數(shù)據(jù)作為原始數(shù)據(jù)建立模型,后4 d數(shù)據(jù)用于預(yù)測值比對,檢驗預(yù)測模型的精度。表2為立柱沉降數(shù)據(jù),選取前6個數(shù)據(jù)作為原始數(shù)據(jù)帶入PSO-VWDGM(1,1)模型,用PSO算法優(yōu)化模型并求得上述3種預(yù)測模型最優(yōu)可變權(quán)重λ1,λ2和λ3,最優(yōu)可變權(quán)重如表3所示。

表2 立柱沉降數(shù)據(jù)Table 2 Settlement data of columns

表3 最優(yōu)可變權(quán)重λTable 3 Optimal variable weights λ
設(shè)粒子種群數(shù)量為50,迭代上限為30次。模型2的最優(yōu)粒子搜索過程如圖1所示,2號模型在迭代18次后,適應(yīng)度趨于穩(wěn)定,模型平均相對誤差為定值,此時求得最優(yōu)可變權(quán)重為0.026 21。模型3的最優(yōu)粒子搜索過程如圖2所示,3號模型在迭代21次后,適應(yīng)度趨于穩(wěn)定,模型后驗差比為定值,此時求得最優(yōu)可變權(quán)重為0.000 24。模型4的最優(yōu)粒子搜索過程如圖3所示,4號模型在迭代10次后,適應(yīng)度趨于穩(wěn)定,模型灰色絕對關(guān)聯(lián)度為定值,求得最優(yōu)可變權(quán)重0.051 78。

圖1 模型2的最優(yōu)粒子搜索過程Fig.1 The optimal particle search process for model 2
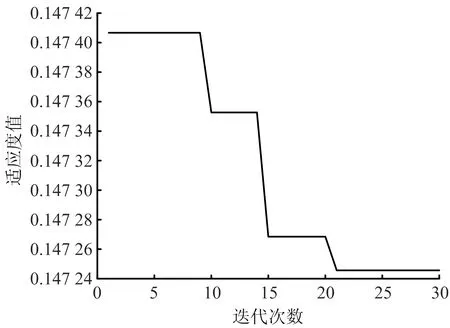
圖2 模型3的最優(yōu)粒子搜索過程Fig.2 The optimal particle search process for model 3
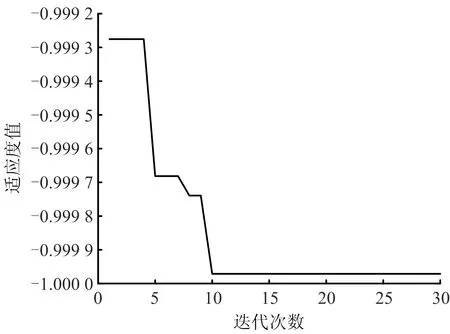
圖3 模型4的最優(yōu)粒子搜索過程Fig.3 The optimal particle search process for model 4
將表3中的可變權(quán)重λ代入式(6)和(7)中,對表2前6個原始數(shù)據(jù)進(jìn)行降噪處理,構(gòu)造PSO-VWDGM(1,1)模型。其中1~4號預(yù)測模型的方程分別為(k=1,2,…,n-1):
(15)
(16)
(17)
(18)
利用上述4個方程求出的擬合值及預(yù)測值,見表4,用式(8)~(10)檢驗4種模型預(yù)測性能,檢驗結(jié)果見表5。
由表4可知,用變權(quán)緩沖算子和PSO算法構(gòu)造的2~4號模型的擬合值及預(yù)測值相比傳統(tǒng)1號DGM(1,1)模型更加接近真實值。由表1和表4可知,4種模型的預(yù)測精度均已經(jīng)達(dá)到1級精度, 2~4號模型預(yù)測值的平均殘差、平均相對誤差、后驗差比和灰色絕對關(guān)聯(lián)度均優(yōu)于1號模型。說明利用PSO算法和變權(quán)緩沖算子構(gòu)造的PSO-VWDGM(1,1)模型的預(yù)測精度更高,優(yōu)于傳統(tǒng)DGM(1,1)模型。
根據(jù)表3、表5和圖4對2~4號模型的比對可知,將不同的精度檢驗方法作為PSO算法的目標(biāo)適應(yīng)度函數(shù)得出的最終結(jié)果存在明顯差異。3號模型(后驗差比檢驗)作為PSO算法的目標(biāo)適應(yīng)度函數(shù)時,得到優(yōu)化后的可變權(quán)重為0.000 24,利用該參數(shù)建立模型得到預(yù)測值的平均殘差、平均相對誤差、后驗差比和灰色絕對關(guān)聯(lián)度分別為0.414 7,2.533 3%,0.377 2和0.986 7,均略大于傳統(tǒng)DGM(1,1)模型,是3種PSO-VWDGM(1,1) 模型中精度等級最低的模型。2號模型(平均相對誤差檢驗)作為PSO算法的目標(biāo)適應(yīng)度函數(shù)時,得到優(yōu)化后的可變權(quán)重為0.026 21,利用該參數(shù)建立模型得到預(yù)測值的平均殘差、平均相對誤差、后驗差比和灰色絕對關(guān)聯(lián)度分別為0.396 7,2.427 6%,0.371 1和0.987 7,均大于傳統(tǒng)DGM(1,1)模型,是3種PSO-VWDGM(1,1)模型中精度等級位于中間的模型。4號模型(灰色絕對關(guān)聯(lián)度檢驗)作為PSO算法的目標(biāo)適應(yīng)度函數(shù)時,到優(yōu)化后的可變權(quán)重為0.051 78,利用該參數(shù)建立模型得到預(yù)測值的平均殘差、平均相對誤差、后驗差比和灰色絕對關(guān)聯(lián)度分別為0.336 2,2.068 2%,0.342 4和0.999 0,均大于傳統(tǒng)DGM(1,1)模型,是3種PSO-VWDGM(1,1)模型中精度等級最高的模型。4號模型的預(yù)測值平均殘差與2號和3號模型相比,精度分別提高了15.24%和18.93%;其預(yù)測值的平均相對誤差與2號和3號模型相比,精度分別提高了14.8%和18.35%;預(yù)測值的后驗差比與2號和3號模型相比,精度分別提高了7.71%和9.21%;預(yù)測值的灰色絕對關(guān)聯(lián)度分別提高了0.23%與0.34%。

表4 不同模型擬合預(yù)測值及殘差Table 4 Fitting predicted values and residuals of different models

表5 不同模型預(yù)測值的精度檢驗Table 5 The accuracy test of the predicted value of different models
為了更加直觀的看出1至4號模型預(yù)測精度的大小關(guān)系,將這4中模型預(yù)測結(jié)果繪制如圖4所示。由上述分析可知,在本工程實例的3個 PSO-VWDGM(1,1)模型中,4號模型具有最高的預(yù)測精度,2號模型次之,3號模型最差。但是3個模型的預(yù)測精度均為1級,均可適用于此工程。
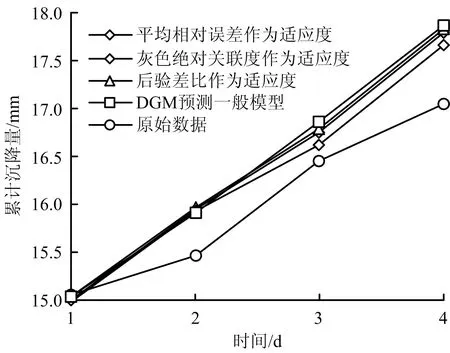
圖4 預(yù)測結(jié)果對比 Fig.4 Comparison of prediction result
4 結(jié)論
1)利用變權(quán)緩沖算子對原始數(shù)據(jù)序列進(jìn)行降噪處理,提高原始序列的光滑性,并通過PSO算法優(yōu)化可變權(quán)重λ構(gòu)造出PSO-VWDGM(1,1)模型,從而達(dá)到調(diào)節(jié)緩沖算子作用強(qiáng)度的目的,實現(xiàn)變權(quán)緩沖算子對原始數(shù)據(jù)序列作用強(qiáng)度的量化與控制。
2)相對誤差檢驗、后驗差比檢驗,灰色絕對關(guān)聯(lián)度檢驗3種精度檢驗方法作為PSO算法目標(biāo)適應(yīng)度函數(shù)建立的模型相比傳統(tǒng)DGM(1,1)模型,其預(yù)測精度高,預(yù)測性能更好。
3)比較3種PSO-VWDGM(1,1)模型可知,以灰色絕對關(guān)聯(lián)度檢驗作為PSO算法的目標(biāo)適應(yīng)度函數(shù)的模型具有較好的預(yù)測精度。3種PSO-VWDGM(1,1)模型均具有1級精度,可以很好地應(yīng)用在工程中。研究結(jié)果能為工程施工階段的基坑變形預(yù)測、穩(wěn)定性分析與災(zāi)害評估、預(yù)警提供指導(dǎo)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
