協作機器人的構型分析研究
2019-04-10 08:38:58田勇王洪光潘新安胡明偉
智能系統學報 2019年2期
田勇,王洪光,潘新安,胡明偉
(1. 中國科學院 沈陽自動化研究所 機器人學國家重點實驗室,遼寧 沈陽 110016; 2. 中國科學院大學,北京100049)
近年來隨著市場的需求從大批量、單一模式向小批量、多樣化方向的轉變,企業對機器的要求不僅僅局限于重復性的作業任務,對成本和收益效率要求有了很大的提高,希望機器人能夠在多項工作任務中快速的轉化,這就要求機器人編程簡單,易于使用。因此,協作機器人逐漸受到世界各國的重視。根據ISO10218-2中的定義,協作機器人是指能夠在指定的協作區域內與人進行直接交互的機器人[1-3]。與傳統的工業機器人相比,協作機器人具有安全性高、通用性好、靈敏精準、易于使用和便于人機協作等優點。上述優點不僅使協作機器人在制造領域中得到應用,而且在家庭服務和康復醫療等領域有潛在的應用價值。目前,典型的協作機器人主要有iiwa、Yumi、Sawyer以及UR等[4-5],國內主要有新松的柔性多關節機器人SCR5,山思躍立研發的協作機器人“WEE”等產品[6]。
協作機器人的構型變化較多,差異較大。而機器人的構型設計是機器人設計的基礎和關鍵,對機器人的性能有重要影響。現有的協作機器人采用了不同的構型,大多數采用了七自由度冗余機器人的構型。
對于7R構型的研究比較有成效的是美國Hollerbach[7]于1985年提出的一種機構按運動學最佳設計觀點,在6R最佳配置機構的肩、肘、腕分別各加一個轉動副,除去自由度退化和重復等效的形式,最終得到一系列的機械臂構型,并推薦了7R機器人的最佳配置;對于冗余機器人機構設計的研究,國內沈陽自動化所[8]研究了7-DOF機器人的圖譜問題,使用位置空間和奇異空間同時評價機構選型,從2 187種構型中選出了64種配置形式并繪制成圖譜;趙占芳[9]等給出了七自由度機器人的選型原則并選出了機器人的理想形式。而目前對七自由度冗余機器人的構型分析研究很少考慮機器人的偏置。文獻[10-12]中分別說明了偏置對機器人的靈活性、工作空間、動力學性能以及運動學的解析式的影響,但沒有明確偏置的定義及研究偏置對機器人性能的具體影響。
針對以上問題,本文以現有的協作機器人為研究對象,對現有的協作機器人構型進行了對比分析,得到偏置的存在是導致構型差異的重要因素。然后對偏置進行了定義與分類,最后通過典型的協作機器人的運動性能進行分析對比,得出了機器人的偏置對性能指標的影響。
1 構型對比分析
如圖1所示。其中,iiwa采用了目前常用的構型SRS(肩關節和腕關節中的關節分別相交于一點),而 Yumi、Sawyer、Franka 構型不滿足 SRS構型,定義這些構型存在偏置。
目前典型的協作機器人采用了轉動關節R,連桿中兩端關節的位置關系如圖2所示,其中zi-1、 zi表 示相鄰關節的軸線, ai-1表示相鄰軸線間的公垂線長度,di表示軸長,θi表示關節的轉角,ai-1表示連桿的扭角。
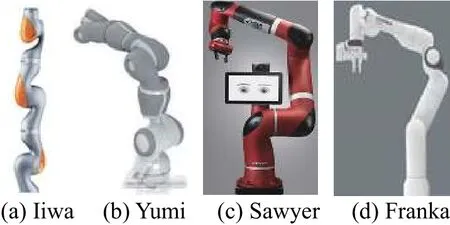
圖1 現有的典型的協作機器人Fig.1 Existing typical collaborative robots
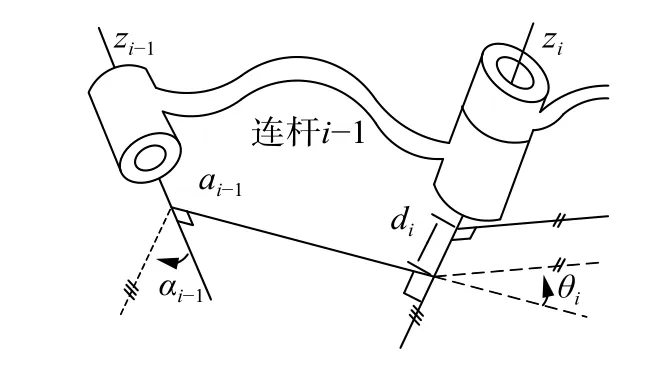
圖2 相鄰關節間的位置關系Fig.2 The positional relationship between adjacent joints
為了更清楚地描述相鄰兩個關節之間的位置關系,Gogu[13]利用4位二進制數據表示運動副的種類及在空間中的連接位姿,并作為桿件的基因碼進行結構綜合。本文采用3位二進制表示相鄰關節的位置關系,如表1所示。其中bit1=0時,關節平行,反之關節垂直;bit2=0表示軸線間的公垂線長度為零,bit3=0表示軸長為零,且當bit1=0時,此時 bit2=1,bit3=0。

表1 位置關系編碼Table1 Positional relationship and coding
則相鄰關節之間的位置關系如圖3所示。
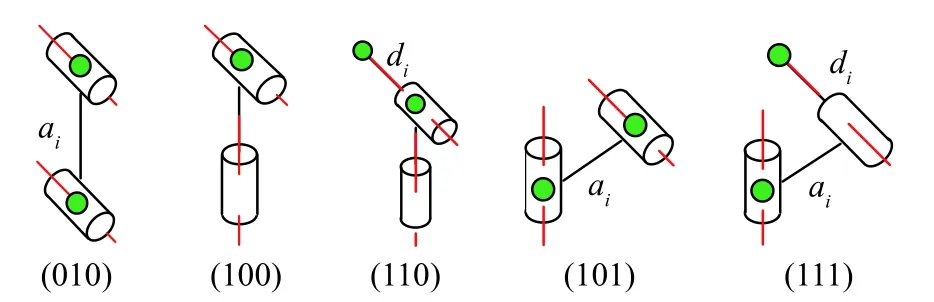
圖3 5種位置關系及編碼Fig.3 Five kinds of positional relationship and coding
圖4 為7DOF機器人的構型,圖5所示為9種典型的協作機器人構型,通過上述的編碼方式對機器人進行編碼,并通過自由度及關節之間的位置關系進行對比,分析協作機器人構型的演化過程。
1)根據協作機器人的自由度數可分為6DOF和7DOF協作機器人。通過機器人機構簡圖可以看出:構型①、②、③屬于6DOF機器人;其余構型屬于7DOF機器人。
2)對于6DOF構型,其中構型①為傳統機器人構型,其編碼為100010110100100,構型②、③是在①的基礎上進行了變化,其編碼分別為110010010110100、100010110110100,構型③是在關節4、5間發生了變化,構型②變化較大。
3) 7DOF協作機器人的機構設計一般是在6DOF機器人機構設計的基礎上,增加一個關節,得到五種構型。冗余構型所具有的自運動特性,能夠改善機器人在工作空間中的避障能力、增加其幾何靈活性、避免內部奇異構型等[14],如圖4所示。而構型(d)不具有自運動特性,沒有起到冗余自由度的作用,因此該構型不能采用。目前的協作機器人都采用(a)的構型,且相鄰關節采用垂直的位置關系,bit1=1。
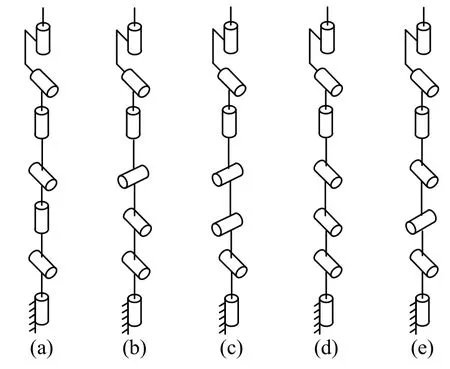
圖4 7DOF機器人的5種構型Fig.4 The five configurations of 7DOF robot
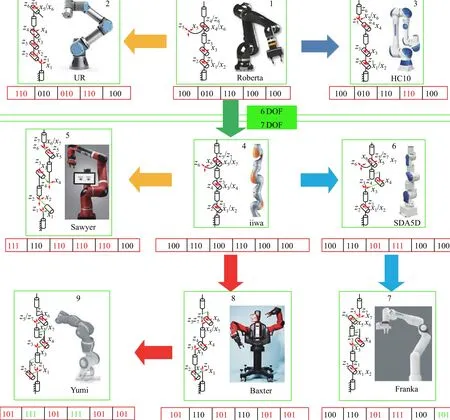
圖5 典型協作機器人的演化及編碼Fig.5 Evolution and coding of typical collaborative robots
4)對于7DOF協作機器人,其構型在構型④的基礎上進行的變化,且構型④是目前采用最為廣泛的構型,其編碼為100|110|100|110|100|100。
5)構型⑤的編碼為111|110|110|110|110|100,與構型④對比可以看出,主要差別體現在bit2。
6)對于構型⑥、⑦,其編碼分別為100|110|101|111|100|100、100|110|101|111|100|101,其中構型⑥在構型④的基礎上變化了關節3、4及4、5之間的關系,構型⑦在構型⑥的基礎上改變了關節6、7之間的關系,與構型④的主要差別體現在bit3。
7)對于構型⑧、⑨,其編碼分別為101|110|101|100|101|101、101|111|101|111|101|101,其中構型⑧在構型④的基礎上變化了關節1-2,3-4,5-6,6-7之間的關系,構型⑨在構型⑧的基礎上改變了關節2-3,4-5之間的關系,與構型④的主要差別體現在bit3。
2 偏置的定義與分類
目前協作機器人構型大多采用7DOF構型,因此本文主要針對7DOF構型進行分析。通過圖5演化過程和編碼差異可以看出:目前協作機器人主要以 R ⊥R⊥R⊥R⊥R⊥R⊥R 為基礎構型,則各構型編碼中的bit1=1,主要不同體現在bit2、bit3上。
本文中以構型④的編碼為基礎編碼,對比機器人各構型對應的編碼,如果有編碼與基礎編碼存在不同,則定義該編碼對應的機器人參數為偏置。偏置參數如表2中所示。
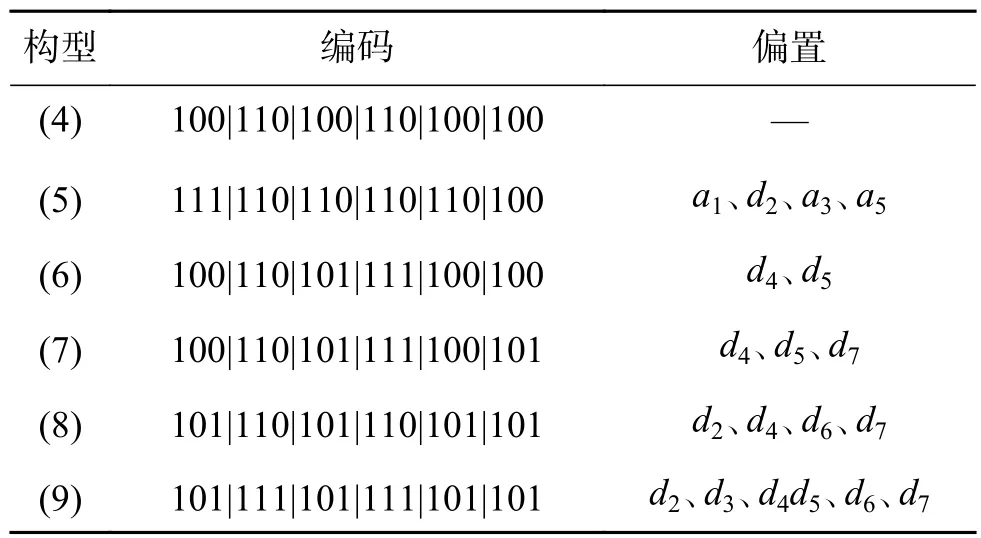
表2 構型編碼及對應偏置參數Table2 Configuration code and offset parameters
通過對構型偏置的定義可以看出:
1)相鄰兩關節軸線平行。該相鄰關節之間不存在偏置,此時定義兩相鄰關節的軸線距離為機器人連桿長度。
2)相鄰兩關節軸線垂直。當相鄰關節軸線異面時,其中一個偏置參數為兩軸線的距離,另一個偏置參數受后一關節坐標系原點的位置影響;當相鄰兩關節軸線相交時,偏置參數受后一關節坐標系原點的位置影響。通過上述分析,最終得到的協作機器人的構型如圖6所示。其中,ai-1表示相鄰軸線間的公垂線長度,di表示軸長。并將偏置類型分為S型與Y型,D-H參數如表3、表4所示。通過分析可以看出,構型偏置的存在對機器人關節運動范圍有很大的影響。其中,偏置d2、d4、d6的存在使得關節 J2、J4、J6的運動角度增加,本文稱此類偏置為S型偏置,如圖5中的Sawyer構型;而偏置 a1、a2、a3、a4、a5、a6的存在使得關節J2、J4、J6的運動角度范圍基本保持不變,但是關節角度上下限發生變化,本文稱此類偏置為Y型偏置,如圖5中的SDA5D、Yumi、Franka、Baxter構型。
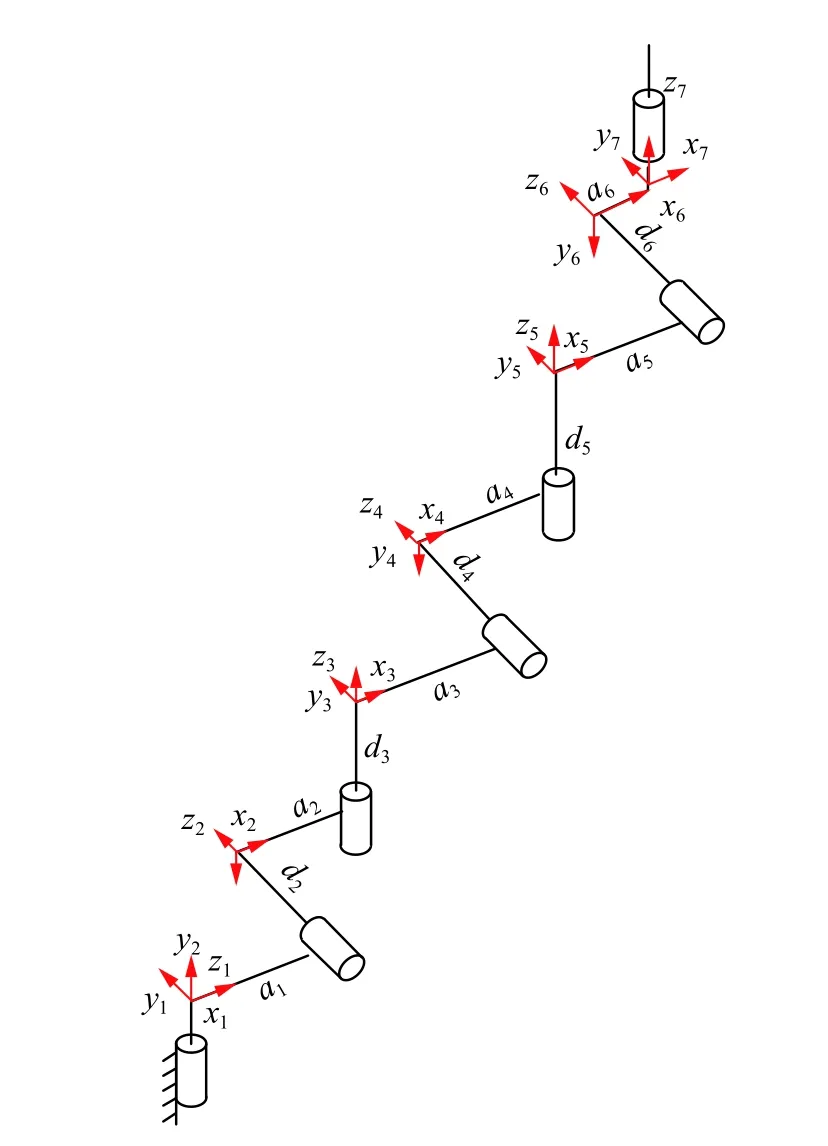
圖6 帶有偏置的協作機器人D-H坐標系Fig.6 Coordinated robot D-H coordinate system with offset
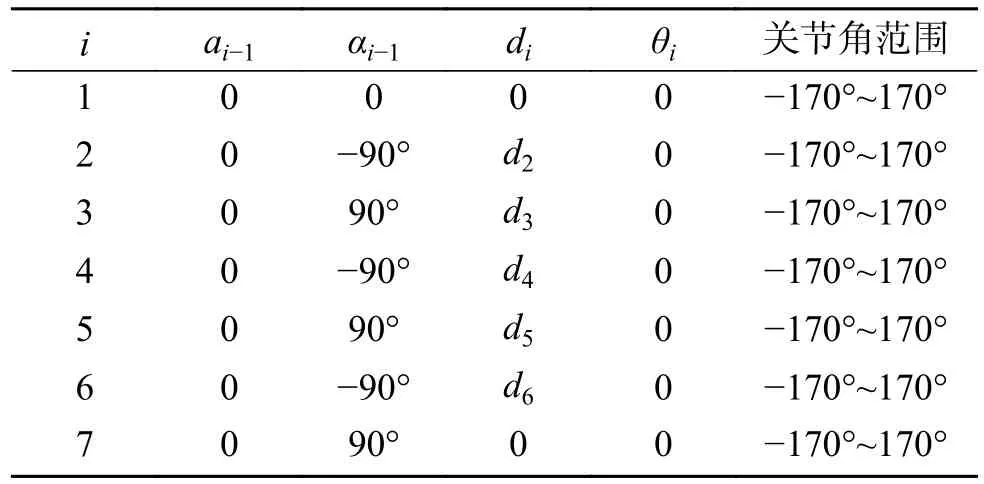
表3 S型偏置的D-H參數Table3 D-H parameters of S offset
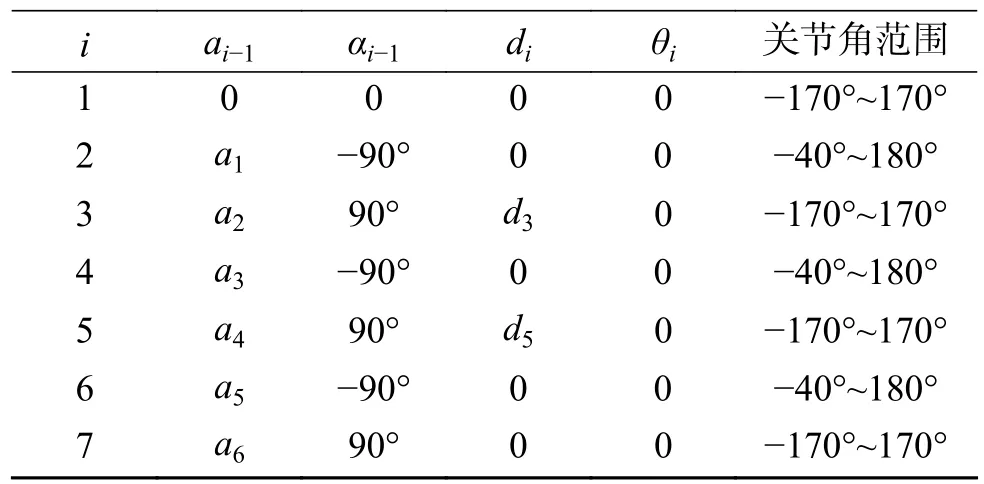
表4 Y型偏置的D-H參數Table4 D-H parameters of Y offset
3 仿真算例
為了研究偏置對構型的影響,本文通過對iiwa、Sawyer、Yumi三種機器人構型的分析進行驗證。
3.1 性能評價指標
評價機器人構型的優劣主要是通過性能評價指標來評價。國內外學者已提出許多性能指標來評價機器人的構型優劣。主要包括條件數、可操作度、方向可操作度、各項同性指標等評價指標。本節主要采用全局性能指標 η、工作空間體積指標QL以及靈活工作空間指標λ。
1)全局性能指標如公式(1)所示,機器人的運動靈活性能反映了機器人在整個工作空間中向各個方向的運動和力的轉化能力[16]。
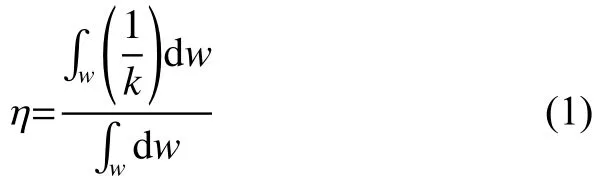
式中:w為工作空間范圍,k為機器人工作空間中每個位姿對應的條件數。根據上述性能指標的定義可知:η 越大,機器人的運動靈活性能越好。
2)工作空間體積指標反映了在機器人連桿總長度一定的情況下,該機器人所能達到的工作空間體積的大小。
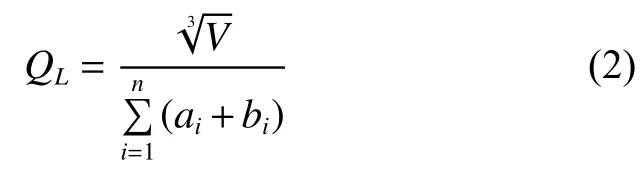
式中:ai、bi分別為機器人偏置參數和連桿尺寸參數;V為機器人的工作空間體積。
3)靈活工作空間指標反映了機器人的末端執行器能以任意姿態到達的點的靈活程度[15]。

式中:m為工作空間中末端點的個數,Di為機器人每個末端點的靈活度。
上述3個指標越大,說明機器人的運動靈活性、工作空間體積性能、靈活工作空間性能越好。
3.2 典型構型的指標對比
通過3.1節的性能指標對iiwa、Sawyer、Yumi進行分析并對比,結果如表5所示。
通過對比分析可以看出:
1)由于偏置的存在,機器人關節的運動范圍發生變化。相對于iiwa構型,Sawyer構型的偏置導致了關節J2、J4、J6的運動范圍增加;而Yumi構型的偏置沒有增加關節運動范圍,但是使得關節運動范圍在某一方向增加,另一方向減小。
2)對于工作空間截面,由于Yumi構型的偏置使得關節運動范圍在某一方向上增加,另一方向上減小,因此導致空間截面不對稱,使得一邊的工作空間增大,另一邊的工作空間減小;而對于Sawyer構型的偏置沒有出現這一現象,只是工作空間體積增加了。圖7為工作空間截面分布圖。
3)兩種偏置對工作空間體積指標都有一定的降低,Sawyer構型對性能指標降低的較明顯;兩種偏置對全局性能指標都有一定的降低,Yumi構型對性能指標降低的較明顯;兩種偏置對靈活工作空間指標都有一定的提高,Sawyer構型對性能指標提高的非常明顯。
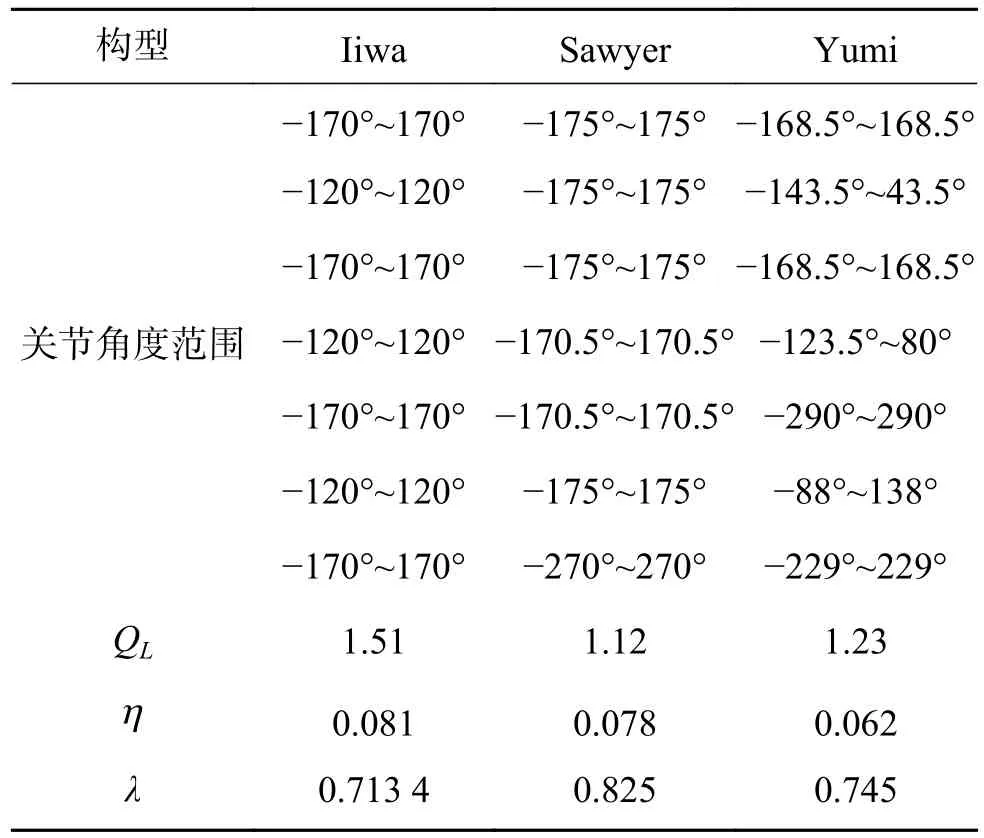
表5 Iiwa、Sawyer、Yumi構型分析對比Table5 Configuration analysis and comparison of Iiwa,Sawyer, Yumi
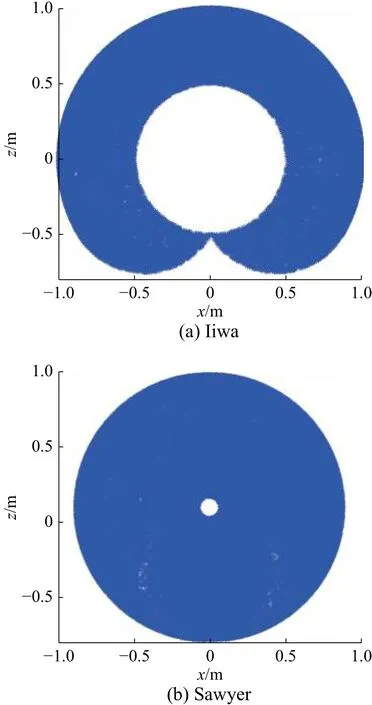
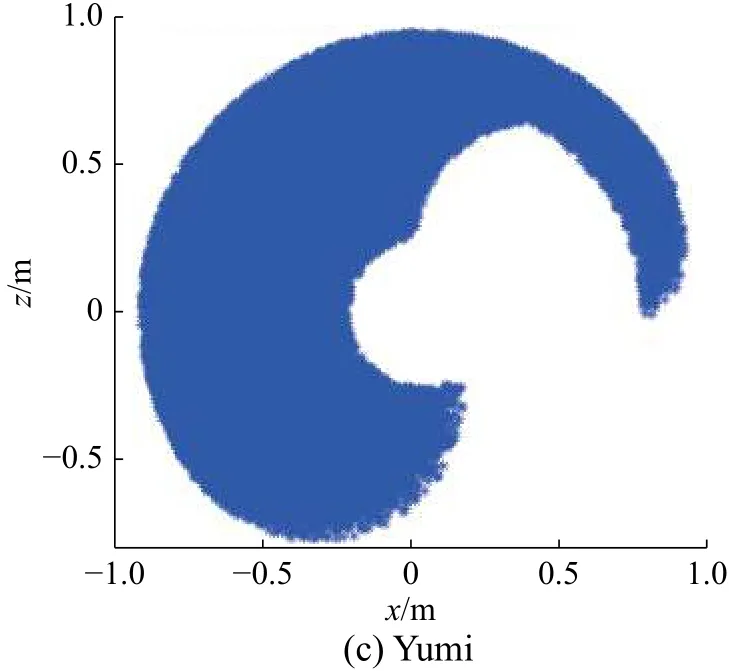
圖7 工作空間x-z截面分布Fig.7 Working space x-z cross section distribution
4 結束語
本文以協作機器人構型為研究目標,首先通過對現有的典型協作機器人的構型進行了對比分析,通過構型間的演化過程發現偏置的存在是導致協作機器人構型差異的重要因素。然后對偏置進行了定義,并將其分為S型和Y型,最終得到了含有偏置的協作機器人基本構型。最后對iiwa、Sawyer、Yumi3種構型進行對比分析,得到不同的偏置對性能指標的影響不同。其中,偏置降低機器人的全局性能、工作空間體積性能,但能夠提高機器人的靈活工作空間性能,該分析研究對后續的協作機器人的構型設計提供了一定的參考。
本文僅在構型的型綜合方面進行了分析研究,沒有通過尺度綜合得到構型偏置對性能指標的具體影響,下一步的研究會通過相應的性能指標對機器人的構型進行尺度綜合,研究偏置對性能指標的具體影響。
