前視多通道SAR自適應(yīng)鑒別抑制欺騙干擾
2019-04-04 01:33:24孟智超盧景月
雷達(dá)學(xué)報(bào) 2019年1期
孟智超 盧景月 張 磊
(西安電子科技大學(xué)雷達(dá)信號(hào)處理國(guó)家重點(diǎn)實(shí)驗(yàn)室 西安 710071)
1 引言
前視合成孔徑雷達(dá)能夠?qū)ζ脚_(tái)正前方區(qū)域進(jìn)行大范圍、高分辨成像[1,2],在軍用以及民用中具有良好的應(yīng)用前景。在軍事偵查中,前視SAR系統(tǒng)往往要面對(duì)復(fù)雜電磁環(huán)境。此時(shí),SAR系統(tǒng)將受到一定程度的干擾,當(dāng)干擾嚴(yán)重時(shí)系統(tǒng)將無(wú)法有效成像。在眾多的干擾方法中,有源欺騙干擾是較難鑒別與抑制的干擾之一[3]。有源欺騙干擾能夠在SAR圖像上模擬出偏離干擾機(jī)位置的大面積虛假目標(biāo)來(lái)掩蓋真實(shí)目標(biāo),使得對(duì)真實(shí)目標(biāo)的識(shí)別變得更為困難。由于前視SAR多用于彈載制導(dǎo)領(lǐng)域,虛假目標(biāo)的出現(xiàn)將對(duì)彈載信號(hào)與信息處理機(jī)能否正確識(shí)別真實(shí)目標(biāo)產(chǎn)生致命影響,因而鑒別并抑制有源欺騙干擾是前視SAR成像必不可少的處理步驟。
在戰(zhàn)場(chǎng)偵察、精確制導(dǎo)等領(lǐng)域,亟需對(duì)欺騙干擾進(jìn)行鑒別和抑制的有效方法。文獻(xiàn)[4]提出利用距離向DBF-SAR系統(tǒng)進(jìn)行欺騙干擾抑制,但實(shí)際工作中干擾回波與真實(shí)目標(biāo)回波必然是面目標(biāo)且有多個(gè)不同方向,文中所述的方法將無(wú)法確定干擾與真實(shí)目標(biāo)各自的方向,因而無(wú)法進(jìn)行干擾抑制。文獻(xiàn)[5]提出基于4通道相干積累的抗欺騙干擾方法,但是實(shí)際中通道數(shù)有限且通道誤差不可避免,使得相干積累后信干比提升有限。文獻(xiàn)[6]提出SAR通過(guò)發(fā)射隨機(jī)線性調(diào)頻斜率信號(hào),使得干擾機(jī)偵測(cè)并發(fā)射的信號(hào)落后于真實(shí)回波信號(hào),從而在匹配濾波時(shí)得不到相應(yīng)的處理增益來(lái)提高信干比。但是可以看到,當(dāng)調(diào)頻斜率變化系數(shù)增大時(shí)成像質(zhì)量嚴(yán)重下降,干擾抑制能力有限。此外,在前視成像模式下抗干擾與解模糊所產(chǎn)生的空域資源競(jìng)爭(zhēng)也是一個(gè)關(guān)鍵問(wèn)題,只有合理的分配空域資源才能利用有限通道做到抗干擾、解模糊同時(shí)進(jìn)行。
距離向DBF-SAR[7]系統(tǒng)的提出,為波束形成技術(shù)在SAR領(lǐng)域的應(yīng)用起到了舉足輕重的作用。本文針對(duì)前視SAR模式下的欺騙干擾抑制問(wèn)題,提出一種欺騙干擾自適應(yīng)鑒別抑制算法。其主要思想是利用欺騙干擾回波與真實(shí)地物回波空時(shí)關(guān)系的差異進(jìn)行干擾與真實(shí)目標(biāo)的分離,利用門(mén)限檢測(cè)法在SAR圖像上進(jìn)行干擾樣本及干擾像素位置的鑒別,然后以空間譜估計(jì)法得到干擾方位角度,最后利用自適應(yīng)空域?yàn)V波法進(jìn)行干擾抑制,實(shí)現(xiàn)抗欺騙干擾的目的。該方法有效地解決了文獻(xiàn)[4]不能對(duì)面目標(biāo)欺騙干擾進(jìn)行鑒別與抑制的問(wèn)題,相對(duì)于文獻(xiàn)[5]而言大大提高了處理后圖像信干比,同時(shí)不會(huì)出現(xiàn)文獻(xiàn)[6]中圖像質(zhì)量下降的問(wèn)題。本文在信號(hào)處理時(shí),利用在陣列通道上以步長(zhǎng)為1的滑窗法依次取出多通道信號(hào)進(jìn)行干擾抑制與解模糊成像,使得空域資源充分利用,在通道數(shù)較少的情況下實(shí)現(xiàn)最大陣列孔徑干擾抑制與解模糊。針對(duì)前視SAR具有高分辨的特性以及欺騙干擾偏離真實(shí)位置的特性,提出局部干擾抑制法,在干擾抑制的同時(shí)完整的保留圖像信息。
2 前視SAR欺騙干擾數(shù)學(xué)模型與問(wèn)題分析
FLMC-SAR (Forward-Looking Multi-Channel SAR)幾何模型如圖1所示。以雷達(dá)航跡在地面的投影為X軸,以陣列排布方向?yàn)閅軸,平臺(tái)離地高度向?yàn)閆軸。假設(shè)平臺(tái)做勻速直線運(yùn)動(dòng),航跡為圖中紅線所示。天線波束下視角為α,目標(biāo)在地面的方位角表示為θ 。Rxi為接收天線陣列,間距為d,均勻分布在Y1YN上,發(fā)射天線Tx位于陣列中心。即陣列中心的天線為收發(fā)共用天線,其余天線為接收天線。
如圖1所示,場(chǎng)景中有一干擾機(jī)位于PJ(xJ,yJ,0)。當(dāng)平臺(tái)對(duì)場(chǎng)景成像時(shí),干擾機(jī)欲在PD(xD,yD,0)點(diǎn)形成欺騙干擾點(diǎn)目標(biāo)。為了簡(jiǎn)單起見(jiàn),首先考慮單天線情況,即只有中間一個(gè)收發(fā)共用天線。此時(shí)天線的位置坐標(biāo)為 (vtm,0,h)。則干擾機(jī)與欺騙點(diǎn)斜距方程如下:
其中,v為平臺(tái)速度,tm為 慢時(shí)間變量,h為平臺(tái)高度。則對(duì)應(yīng)于干擾機(jī)位置與欺騙點(diǎn)位置回波如下:
其中,AJ為干擾機(jī)位置處目標(biāo)回波幅度,AD為欺騙干擾點(diǎn)位置處目標(biāo)回波幅度。wr和wa分別為距離向與方位向窗函數(shù),本文將其簡(jiǎn)化為矩形窗。
由式(3)與式(4)可以看出,欺騙干擾回波與干擾機(jī)處真實(shí)目標(biāo)回波的差異在于斜距歷史的不同,也即斜距歷史引起的回波距離向滯后時(shí)間與方位向多普勒相位不同。由此可知,為了使干擾機(jī)能夠發(fā)射欺騙干擾,只需對(duì)干擾機(jī)接收的目標(biāo)SAR信號(hào)進(jìn)行距離向與方位向調(diào)制即可,調(diào)制的大小由二者實(shí)時(shí)距離差決定。對(duì)此,干擾生成的方法具體如下:
對(duì)于轉(zhuǎn)發(fā)式干擾機(jī)形成欺騙干擾的方法為,在回波SJ(t,tm) 的基礎(chǔ)上進(jìn)行調(diào)制得到SD(t,tm)。對(duì)兩回波做距離向傅里葉變換得:
其中,f為快時(shí)間對(duì)應(yīng)頻率,fc為載頻頻率。令:

由式(8)可知,干擾機(jī)只要對(duì)接收到的SAR信號(hào)在距離頻域調(diào)制一個(gè)與欺騙點(diǎn)到干擾機(jī)之間斜距差有關(guān)的線性相位項(xiàng),再進(jìn)行逆傅里葉變換得到時(shí)域信號(hào)發(fā)射出去,即可形成欺騙干擾。下面,我們寫(xiě)出前視SAR系統(tǒng)接收到的多通道干擾回波信號(hào)模型。
在滿足窄帶信號(hào)與平臺(tái)飛行距離很小的假設(shè)下,干擾機(jī)方位角度為 θJ且在成像期間保持不變。則此時(shí)干擾機(jī)發(fā)射的欺騙信號(hào)被每個(gè)接收通道接收,各通道欺騙干擾回波信號(hào)如下:Yi為第i個(gè)接收通道的Y軸坐標(biāo)。分析式(5)、式(8)、式(9)可得如下結(jié)論:欺騙干擾回波對(duì)每一個(gè)單通道接收來(lái)說(shuō)都是與真實(shí)回波無(wú)差異的,但是將多個(gè)接收通道回波聯(lián)合來(lái)看,欺騙干擾回波成像位置在欺騙干擾點(diǎn)PD處,但是其回波到達(dá)角卻與干擾機(jī)真實(shí)位置PJ點(diǎn)一致。這就為我們鑒別欺騙干擾提供了思路,即查看每一像素點(diǎn)的成像位置是否與其波達(dá)角一致,不一致則是欺騙干擾。

圖2 欺騙干擾與真實(shí)回波空時(shí)關(guān)系差異Fig.2 Difference between deception jamming and real echo space time relationship
3 自適應(yīng)欺騙干擾鑒別與局部干擾抑制
上節(jié)中,通過(guò)對(duì)比干擾機(jī)處真實(shí)SAR回波與欺騙干擾回波的差異,發(fā)現(xiàn)欺騙干擾是可以由干擾機(jī)對(duì)真實(shí)SAR信號(hào)進(jìn)行調(diào)制得到的。由式(8)中與fc相關(guān)的相位項(xiàng)可知,對(duì)于方位向信號(hào)來(lái)說(shuō),由于干擾信號(hào)是對(duì)真實(shí)目標(biāo)信號(hào)調(diào)制了一個(gè)附加多普勒相位項(xiàng)。使得對(duì)于前視SAR接收到的多通道回波而言,干擾信號(hào)的空時(shí)關(guān)系不同于真實(shí)目標(biāo)回波信號(hào)的空時(shí)關(guān)系[7,8]。如圖2所示。
圖2中,欺騙干擾空時(shí)譜由于附加了一個(gè)與實(shí)時(shí)斜距差有關(guān)的多普勒相位,導(dǎo)致欺騙干擾回波空時(shí)關(guān)系偏離真實(shí)空時(shí)譜并在多普勒軸上切出一個(gè)截距,這一截距正是附加的多普勒值。此時(shí)欺騙干擾的空時(shí)關(guān)系如下:

其中,fdD和fdJ分別為PD和PJ處目標(biāo)回波的多普勒頻率,Δfd為附加多普勒值。
同時(shí),可以看到圖中的欺騙干擾空時(shí)譜的斜率為真實(shí)回波空時(shí)譜的一半。這是由于,當(dāng)干擾機(jī)已知SAR信號(hào)參數(shù)時(shí),僅對(duì)目標(biāo)SAR發(fā)射干擾而非調(diào)制轉(zhuǎn)發(fā)SAR回波。因此干擾回波為單程,多普勒與速度為1倍關(guān)系:

從這一差異圖可以明顯看出,利用其中任何一種空時(shí)譜就可以輕而易舉地提取該信號(hào)并抑制另一信號(hào),或者抑制該信號(hào)提取另一信號(hào)。由于欺騙干擾空時(shí)關(guān)系未知,因此,可以選擇利用真實(shí)地物回波空時(shí)譜進(jìn)行真實(shí)地物回波提取,并抑制欺騙干擾。也可以先提取欺騙干擾,在獲得干擾信息后進(jìn)行干擾抑制。
為了能夠獲得干擾更多的信息,本文選擇先提取干擾,在獲得干擾信息后進(jìn)行干擾抑制。從圖2中可以看到,欺騙干擾空時(shí)譜與真實(shí)地物回波空時(shí)譜無(wú)重疊,也就是在進(jìn)行地物相消時(shí)不損失干擾信號(hào),且干擾信號(hào)中不含有地物回波信號(hào)。
前視情況下,由于方位采樣的原因從回波信號(hào)中不能直接得到真實(shí)的空時(shí)關(guān)系。一種免于求解空時(shí)譜關(guān)系的方法是對(duì)回波進(jìn)行BP (Back Projection)成像,對(duì)方位角度進(jìn)行網(wǎng)格劃分,此時(shí)每個(gè)方位角已知,因而不必計(jì)算。首先,構(gòu)造可以抑制當(dāng)前角度真實(shí)地物回波的正交投影權(quán)矢量[9,10]。由于前視回波的左右模糊特性,需要得到能夠同時(shí)在對(duì)稱角度上形成凹口的正交投影權(quán)。角度 θi對(duì)應(yīng)的空域?qū)蚴噶繛?/p>

則,角度θi所對(duì)應(yīng)的正交投影矩陣為




利用上述步驟便可以得到抑制真實(shí)地物回波的空域正交權(quán)矢量。然后對(duì)BP成像后的每一方位角上所有距離單元進(jìn)行空域?yàn)V波便可以抑制真實(shí)地物回波。假設(shè)第i列含有欺騙干擾,其對(duì)應(yīng)的方位角為θi,則這一角度上距離單元為R的回波快拍為

式中,σ為與距離R,角度θ 有關(guān)的真實(shí)地物散射系數(shù)。 σD為欺騙干擾散射系數(shù),由干擾發(fā)射功率決定,為干擾機(jī)處的導(dǎo)向矢量。

從式(18)可以看出,利用權(quán)矢量抑制真實(shí)地物回波的同時(shí)由于欺騙干擾導(dǎo)向矢量與權(quán)矢量不正交,所以干擾不受影響,被保留下來(lái)。
在利用上述地物相消法后,回波數(shù)據(jù)中的真實(shí)地物回波將被完全抑制,使得干信比大大提升。這時(shí)可利用門(mén)限檢測(cè)法獲得具有高干信比的干擾樣本,利用高干信比的干擾樣本將得到精確的干擾估計(jì)角度。最后,利用空域自適應(yīng)波束形成對(duì)含干擾數(shù)據(jù)進(jìn)行空域?yàn)V波便能夠有效地抑制所有干擾,得到無(wú)干擾圖像。
在上述空域?yàn)V波時(shí),一般做法是將得到的空域?yàn)V波器對(duì)全空域數(shù)據(jù)進(jìn)行濾波。但是,此方法在抑制欺騙干擾的同時(shí),不可避免地將與干擾機(jī)同一方向上的真實(shí)地物回波一同濾除,圖像上將出現(xiàn)因信號(hào)損失而形成的黑色區(qū)域。由前面幾節(jié)所述,欺騙干擾在圖像上所覆蓋的位置并非其真實(shí)位置。如式(17)所示,圖像上含干擾的方位位置所對(duì)應(yīng)的角度θ1i和θ2i并不是欺騙干擾波達(dá)方向θD。此時(shí)利用估計(jì)得到的干擾方位角獲得干擾導(dǎo)向矢量利用式(13)計(jì)算得到正交投影矩陣,同時(shí)利用式(16)獲得一個(gè)正交投影權(quán)矢量此時(shí)的權(quán)矢量?jī)H抑制欺騙干擾而對(duì)真實(shí)地物回波不加抑制,其表達(dá)式如下:

可以看到,在對(duì)干擾所在像素區(qū)域進(jìn)行空域?yàn)V波時(shí),由于真實(shí)地物回波的到達(dá)角不同于欺騙干擾,所以,真實(shí)地物回波信號(hào)不受損失而干擾被抑制。如果干擾抑制僅在干擾所在的像素位置上進(jìn)行,則與欺騙干擾同一方向的地物回波不受損失,且被欺騙干擾掩蓋的地物回波也不受損失,所以圖像將完整保留。本文將此方法稱之為自適應(yīng)欺騙干擾局部抑制法。這一方法行之有效的基礎(chǔ)是前視SAR系統(tǒng)可以得到高分辨的圖像,使得在地物抑制后可以利用門(mén)限檢測(cè)法來(lái)對(duì)欺騙干擾進(jìn)行像素位置的定位。
前視多通道合成孔徑雷達(dá)成像的基本步驟為:回波距離脈壓、BP成像[11]、解模糊成像[12,13]。由于干擾不能被解模糊,且解模糊之后將影響干擾樣本的提取,所以干擾抑制需在解模糊之前進(jìn)行。則前視多通道合成孔徑雷達(dá)抗欺騙干擾成像的算法具體流程見(jiàn)圖3。
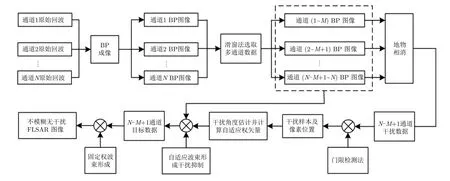
圖3 欺騙干擾抑制算法流程Fig.3 Deception interference suppression algorithm flow
4 仿真分析
在真實(shí)環(huán)境中當(dāng)彈載雷達(dá)鎖定真實(shí)艦船時(shí),干擾機(jī)發(fā)射欺騙信號(hào)形成欺騙目標(biāo)。若彈載計(jì)算機(jī)無(wú)法判斷欺騙干擾與真實(shí)目標(biāo),則將誤導(dǎo)彈載信號(hào)與信息處理機(jī)做出錯(cuò)誤判斷。因此本文仿真設(shè)置見(jiàn)表1。

表1 系統(tǒng)參數(shù)Tab.1 System parameters
采用前視9通道線性陣列接收回波,信號(hào)處理時(shí)通道資源配置如下:干擾抑制用5通道進(jìn)行,波束形成解模糊也用5通道進(jìn)行,多通道數(shù)據(jù)獲取方法為如前所述的步長(zhǎng)為1的滑窗法。目標(biāo)設(shè)置如下:利用真實(shí)SAR圖像作為背景仿真得到真實(shí)目標(biāo)回波,仿真得到真實(shí)方位角為5.17°虛假方位角為(-2°,-3°)之間的3艘艦船欺騙干擾目標(biāo)。
實(shí)驗(yàn)?zāi)M直線航跡下的FLMC-SAR系統(tǒng)進(jìn)行回波仿真,采用上述算法對(duì)回波進(jìn)行欺騙干擾鑒別抑制成像如下:
加入欺騙干擾后進(jìn)行前視單通道BP模糊成像的結(jié)果如圖4(b)所示,可以看到在澤碧島下部小船的附近出現(xiàn)了3艘反射很強(qiáng)的艦船目標(biāo),即為欺騙艦船。
如圖5(a)所示,地物抑制后圖像域僅保留欺騙干擾。此時(shí),干信比大大提升使得干擾樣本的提取更加容易。由圖5(b)可以看出,在利用門(mén)限檢測(cè)法后幾乎所有欺騙干擾都被正確定位,圖5(a)中船只之間干擾旁瓣所在區(qū)域也被正確選出。
圖6即為利用獲得的高干信比的干擾樣本估計(jì)的欺騙干擾方向,與設(shè)置值5.17°對(duì)比來(lái)看誤差為0.006°,這一誤差值在實(shí)際數(shù)據(jù)處理中遠(yuǎn)小于誤差容忍值。
圖7(a)、圖7(b)為干擾抑制后解模糊成像結(jié)果,圖7(a)為全空域干擾抑制結(jié)果,圖7(b)為局部干擾抑制結(jié)果。兩圖對(duì)比來(lái)看,局部干擾抑制解模糊完整地保存了原始圖像,被欺騙干擾覆蓋的區(qū)域以及與欺騙干擾同方向的區(qū)域,地物真實(shí)回波信號(hào)都未損失圖像被完整保留。而對(duì)于全空域欺騙干擾抑制,被欺騙干擾覆蓋的區(qū)域地物真實(shí)回波未損失。干擾機(jī)位置附近的地物回波損失嚴(yán)重,使得右下角的島嶼及道路完全被抑制,圖像信息未能完整保存。
處理前后的性能指標(biāo)測(cè)得如表2所示。其中信干比增益為干擾機(jī)方向上干擾抑制后信干比與抑制前信干比之比的分貝值,干擾抑制比為處理前后欺騙干擾功率比,信號(hào)抑制比為處理前后干擾機(jī)方向上期望信號(hào)功率比。
從結(jié)果圖可以看出,傳統(tǒng)的全空域干擾抑制法在去除干擾的同時(shí),使得場(chǎng)景右邊干擾機(jī)附近的圖像被抑制,形成一條黑帶區(qū)域,圖像信息損失。這一點(diǎn)從表2也可以看出,其中信號(hào)與干擾都被抑制了30.75 dB。而本文所提的局部干擾抑制法幾乎對(duì)圖像無(wú)損失,圖像信息被完整保留。且從表2可以看出,此時(shí)的干擾抑制性能良好。
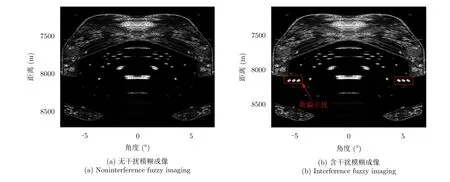
圖4 加入欺騙干擾前后對(duì)比Fig.4 Comparison before and after adding spoofing jamming

圖5 地物相消與干擾位置定位Fig.5 Location cancellation and interference position locating
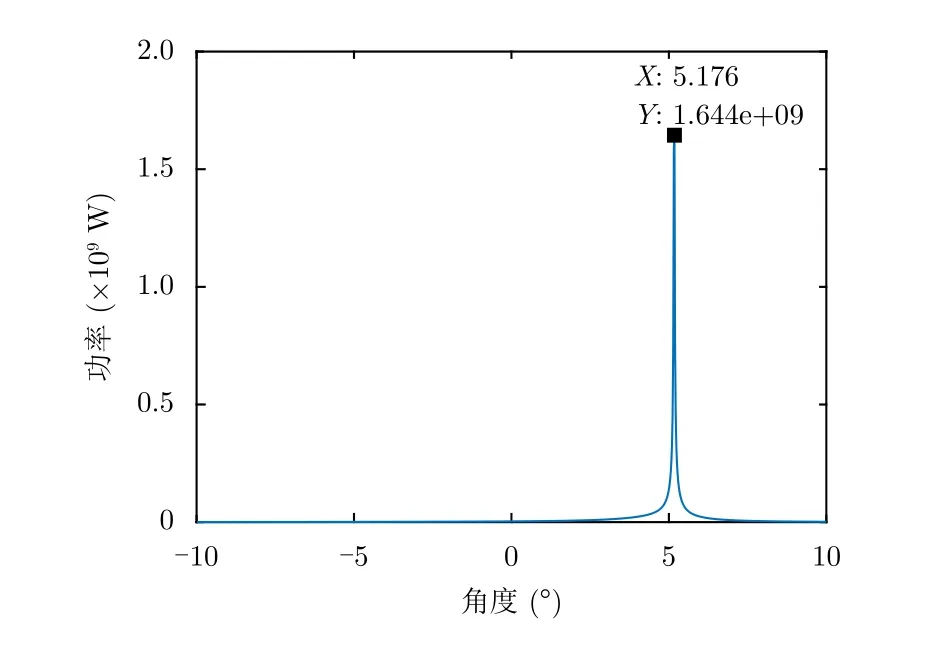
圖6 干擾角度估計(jì)結(jié)果Fig.6 Interference angle estimation results
5 結(jié)論
本文針對(duì)前視SAR系統(tǒng)面臨欺騙干擾難以有效鑒別并抑制的問(wèn)題,提出了一種欺騙干擾自適應(yīng)鑒別抑制算法。該算法根據(jù)欺騙干擾與真實(shí)地物回波空時(shí)關(guān)系的差異進(jìn)行干擾的分離與鑒別,利用AADBF法進(jìn)行局部空域干擾抑制,從而實(shí)現(xiàn)了前視SAR系統(tǒng)抗欺騙干擾的目的。該方法不僅能夠準(zhǔn)確地鑒別抑制面目標(biāo)欺騙干擾,而且相對(duì)于傳統(tǒng)的全空域干擾抑制法,不會(huì)造成與干擾同一方向上的真實(shí)地物回波信號(hào)的損失,使得圖像信息完整保存。本文方法是基于欺騙干擾回波與真實(shí)地物回波空時(shí)關(guān)系差異較大的情況下提出的,需要進(jìn)一步研究如何在這一差異較小時(shí)進(jìn)行欺騙干擾的鑒別與抑制。

圖7 欺騙干擾抑制解模糊對(duì)比Fig.7 Comparison of deception interference suppression ambiguity resolution

表2 處理性能對(duì)比Tab.2 The comparison of processing performance
猜你喜歡
中等數(shù)學(xué)(2022年2期)2022-06-05 07:10:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年11期)2021-12-06 05:38:48
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2020年6期)2020-07-25 02:31:36
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2018年9期)2018-09-26 05:59:44
瘋狂英語(yǔ)·新讀寫(xiě)(2018年2期)2018-09-07 09:32:10
數(shù)學(xué)小靈通·3-4年級(jí)(2017年6期)2017-06-22 11:28:50
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
