交叉眼干擾研究綜述
2019-04-04 01:33:36劉天鵬魏璽章丁錦燦
雷達學報 2019年1期
關鍵詞:系統
劉天鵬 魏璽章 劉 振 丁錦燦
①(國防科技大學電子科學學院 長沙 410073)
②(中山大學電子與通信工程學院 廣州 510006)
③(國防科技大學研究生院 長沙 410073)
1 引言
高效低費的精確制導武器已成為戰場上最主要的硬殺傷武器,是空海戰場中戰機、艦船等武器裝備的主要威脅來源。為提高飛機、艦船平臺的戰場生存能力,對抗精確制導武器的跟蹤打擊,自衛式電子干擾正成為電子戰(Electronic Warfare, EW)領域的研究熱點。
先進的空空導彈、反艦導彈等精確制導武器廣泛采用主動式雷達導引頭。在雷達導引頭角跟蹤中,通常采用兼具較高的測角精度和較強的抗干擾能力的單脈沖測角方式[1]。干擾單脈沖雷達一度成為電子戰領域的研究難點[2-6]。根據Dave Adamy[4]在EW101中的總結,單脈沖雷達干擾樣式大致有以下幾種:地形反彈干擾[7]、鏡像干擾、邊頻干擾、閃爍干擾[8,9]、拖曳式誘餌[10]、交叉極化干擾[11],以及交叉眼干擾[12,13]。當前,形成裝備的主要干擾樣式大多屬于體外式非相干角度欺騙干擾,如機載拖曳式誘餌、艦射“海妖”傘降式誘餌彈、“納爾卡”懸停式誘餌彈等,如圖1所示,其特點是干擾機被配置在被保護平臺之外,通過發射大功率干擾信號誘偏來襲導彈,實現平臺自衛。

圖1 體外式非相干角度欺騙干擾裝備Fig.1 Off-board nonconherent angular deception jammer
然而,現有的體外式非相干角度欺騙干擾在實戰條件下干擾效果并不理想。例如,機載拖曳式誘餌存在干擾錐形盲區、誘偏性能不穩定、影響載機機動等問題[14];傘降式誘餌彈受氣象條件影響較大,惡劣氣象條件下難以使用,工作時間受限于降落傘的性能[15];懸停式誘餌彈使用過程較為復雜,需要發射前根據被保護艦船的航向、航速以及風向等參數,計算最佳發射時間和飛行航線,并存在空中懸停時間短的缺陷[16]。
相比之下,交叉眼干擾是一種能夠有效對抗單脈沖測角雷達的干擾樣式,屬于相干干擾體制,干擾機被配置在被保護平臺之上。交叉眼干擾具有可靠性高、系統反應時間短、有效干擾時間長、壽命周期成本低,以及能夠對抗多導彈威脅等優勢[5,6],近年來受到國內外學者的廣泛關注。
本文將從交叉眼干擾的理論發展、裝備發展、應用難題以及研究趨勢等方面詳細闡述,試圖為研究者提供關于交叉眼干擾的全面認識。本文論述理論發展時,根據交叉眼干擾發展的時間脈絡劃分了3個發展階段;論述裝備發展時,從試驗情況、現役裝備2個方面進行了闡述;論述應用難題時,以研制交叉眼干擾系統為落腳點,從干擾天線結構、系統參數容限、干信比需求以及干擾環路差異等4個方面綜合論述;最后對交叉眼干擾的研究趨勢進行了前瞻性分析。
2 交叉眼干擾的理論發展
交叉眼干擾是通過發射兩路或多路幅度近似相等、相位相差180°的干擾信號,可以使單脈沖雷達指向偏離目標,甚至使單脈沖雷達跟蹤失鎖。交叉眼干擾最早于1958年(1977年解密)被提出[17,18],經過半個多世紀的發展,其干擾理論有了長足的進步。梳理交叉眼干擾理論發展脈絡,大致可以分為人工角閃爍、兩源反向交叉眼干擾、多源反向交叉眼干擾3個階段。
2.1 人工角閃爍階段
交叉眼干擾的最初概念是受角閃爍物理現象啟發而提出的[17,18]。角閃爍現象對所有跟蹤雷達都會產生影響,當復雜目標上的2個散射點間隔一定距離、相位差180°時,目標回波的相位波前將會發生扭曲,進而造成跟蹤雷達天線指向發生偏差[19,20]。交叉眼干擾通過人為地模擬了最差情況下的角閃爍現象,實現對單脈沖雷達的角度欺騙干擾。因此,傳統交叉眼干擾又被稱為“人工角閃爍”干擾[21]、“波前扭曲”干擾[22]。
1963年,Redmill等人[21]對傳統交叉眼干擾進行了數學建模以及系統設計,是較為系統研究交叉眼干擾的早期文獻之一。然而,受限于當時的硬件條件,人們難以精確控制2個干擾源之間的180°相位差。此后一段時間內,鮮有人繼續研究交叉眼干擾。
角閃爍現象更適合去理解交叉眼干擾。交叉眼干擾人為復現角閃爍現象,可從干涉現象對其進行物理解釋。幅度近似相等、相位反相的兩路干擾信號在空間合成時會發生相消干涉,并在雷達天線處形成零陷。然而,零陷處的相位波前是扭曲的,若雷達天線以波前法線方向指示目標,則天線指向會產生偏差而無法指向真實目標,如圖2所示。
線性擬合分析是分析傳統交叉眼干擾的主要手段[23],通過對單脈沖雷達的和、差通道波束進行線性擬合,來推導在交叉眼干擾作用下單脈沖雷達的視軸指向,即單脈沖指示角。線性擬合分析下的單脈沖指示角表達式為

其中, ? 為取實部運算,θi為 單脈沖指示角,θr為雷達視軸轉角,θe為2個干擾源相對于雷達的半張角,G定義為交叉眼增益,由式(2)給出。

圖2 交叉眼干擾的物理解釋Fig.2 The physical interpretation of cross-eye jamming
其中,a和φ 分別為兩路干擾信號的幅度之比和相位之差,分別簡稱為幅度比、相位差。
在交叉眼干擾的作用下,單脈沖指示角由兩部分組成:一部分為指示目標角度的雷達視軸轉角θr,另一部分為交叉眼干擾引入的測角誤差θeG。當干擾源半張角θe為固定值時,測角誤差與交叉眼增益有關,且成正比關系。從交叉眼增益的定義來看,當幅度比a→1 、相位差φ =180°時,交叉眼增益將趨于無窮大,而這正是交叉眼干擾要求兩路干擾信號幅度近似相等、相位反相的原因所在。
考慮到波束線性擬合僅在單脈沖雷達視軸附近時成立,因此人工角閃爍階段的干擾理論僅適用于定性地理解交叉眼干擾,并不具備裝備研制的指導性。
2.2 兩源反向交叉眼干擾階段
隨著數字射頻存儲器(Digital Radio Frequency Memory, DRFM)在雷達信號處理系統的廣泛應用[24,25]以及具備自調相特性的反向天線陣的提出[26,27],交叉眼干擾進入了兩源反向交叉眼干擾階段[12,13,28-33]。
1997年,美國空軍大學空軍科技研究所開展了反向交叉眼干擾研究,提出了對抗脈間頻率捷變的交叉眼干擾方案[31]。文獻[12,13,28]中,瑞典國防研究所在1999~2007年期間持續對交叉眼干擾展開了深入研究,從天線互易的角度分析了交叉眼干擾在復雜環境下的干擾性能,并在美國電子對抗協會-“老烏鴉協會”(Association of Old Crows, AOC)的國際會議上進行了多次現場報告[29]。進入21世紀以來,交叉眼干擾越來越受重視,多篇美國專利從交叉眼干擾實現、交叉眼干擾識別與消除等方面進行了研究[34,35]。在此期間,國內學者開始了交叉眼干擾研究,部分學者將交叉眼干擾稱為相干兩點源干擾,大多以角閃爍理論為基礎[36-39],理論上鮮有突破。
2009年,南非普陀利亞大學du Plessis等人[32,33,40-43]系統研究了兩源反向交叉眼干擾,從反向天線結構對單脈沖雷達和、差通道回波影響的角度出發,對反向交叉眼干擾進行了嚴謹的數學推導,指出反向天線結構是使交叉眼干擾克服苛刻參數容限并走向實用化的唯一可行結構方案,主要貢獻在于糾正了線性擬合分析中的近似錯誤,形成了兩源反向交叉眼干擾的一般性結論[32]。
文獻[32,33]中,作者對兩源反向交叉眼干擾進行了精確數學分析,其干擾比相單脈沖雷達的場景如圖3所示。在不考慮平臺反射回波的情況下,單脈沖指示角θi為

其中,β 為自由空間相位常數,dp為比相單脈沖雷達天線間隔,ks,kc分別定義為

圖3 兩源反向交叉眼干擾的干擾場景Fig.3 Jamming geometry of two-element retrodirective cross-eye jamming
對比式(1)和式(3)可以看出,在兩源反向交叉眼干擾的作用下,單脈沖指示角與交叉眼增益、干擾天線半張角的關系蘊涵在三角函數之中,而非線性擬合分析所得到的線性關系。
在精確分析單脈沖指示角時,文獻[32]給出了兩源反向交叉眼干擾的一般性結論:交叉眼增益越大、干擾基線越長,交叉眼干擾造成單脈沖雷達的測角誤差越大;當幅度比、相位差接近理想值時,單脈沖雷達的和通道回波降低;干擾天線的增益不影響測角誤差的大小;交叉眼干擾引入的測角誤差不會體現在單脈沖雷達的和通道回波中;和通道波束寬度內單脈沖指示角不為零,意味著交叉眼干擾可造成單脈沖雷達跟蹤失鎖。
在硬件器件和干擾理論的推動下,交叉眼干擾裝備實現了快速發展。目前,文獻報道的交叉眼干擾裝備均是基于兩源反向交叉眼干擾開展研制的。然而,在實際應用中,兩源反向交叉眼干擾的干擾性能仍然受到較小的波前扭曲寬度、苛刻的參數容限和較高的干信比需求等因素的限制。
2.3 多源反向交叉眼干擾階段
采用天線陣列以增加干擾機系統自由度的思路為解決兩源交叉眼干擾實用化限制因素提供了技術途徑。基于天線陣列的角度欺騙干擾技術最早由文獻[44]于1997年提出。在此基礎上,Harwood等人[45]于2007年提出了多源交叉眼干擾的概念,通過提高干擾系統自由度靈活地控制相位波前,但作者并沒有給出多源交叉眼干擾的數學推導。
2013年開始,國防科技大學劉天鵬等人[46-50]為克服兩源反向交叉眼干擾實用化的制約因素,提出了基于線性反向天線陣和圓形反向天線陣的多源反向交叉眼干擾,相比兩源反向交叉眼干擾能夠造成單脈沖雷達更大的測角誤差,同時具有更優的參數容限和干信比性能。基于圓形反向天線陣提出了多源圓陣反向交叉眼干擾,通過實時調整干擾環路的參數調制方向,合理設置多干擾環路的角度間隔,可實現被保護平臺360°姿態角范圍內持續、穩健的干擾性能。
得益于更優的干擾性能,多源反向交叉眼干擾研究越來越受到國內外學者的關注,已成為交叉眼干擾理論的前沿方向。西安電子科技大學劉松楊等人[51]提出了基于正交四點源的多源反向交叉眼干擾方案,該方案保證了在干擾平臺旋轉、抖動或者被不同方向上的單脈沖雷達掃描時,仍能保持一定的干擾效果,并進行了參數容限等方面的研究。此外,劉松楊等人[52]又在正交四點源的基礎上結合線陣提出了正交多點源交叉眼干擾技術。南非普陀利亞大學開展了多干擾環路交叉眼干擾技術研究[53-56],推導了多干擾環路相位中心位于同一點時的交叉眼增益,研究了多個干擾環路之間路徑差異對干擾性能的影響。
無論是多源反向交叉眼干擾還是多環路反向交叉眼干擾,其本質是一致的,即增加系統自由度提高干擾性能,區別在于多個干擾環路的相位中心是否在同一點,如圖4所示。多源反向交叉眼干擾的多個干擾環路相位中心位于同一點,具有相同的干擾距離r,更利于布局在同一剛性平臺,如圖4(a)所示。而中心不在同一點的多環路反向交叉眼干擾更適合于分布式多平臺布局,每個干擾環路具有各自的干擾距離rn、干擾轉角θcn,如圖4(b)所示。
基于圖4(a)中多源反向交叉眼干擾的干擾場景,在不考慮平臺反射回波的情況下,單脈沖指示角為[46]

多源反向交叉眼干擾的交叉眼增益GM表達式為[46]

圖4 多源/多環路反向交叉眼干擾的干擾場景Fig.4 Jamming geometry of multiple-element or multi-loop retrodirective cross-eye jamming
其中,N為干擾天線陣元個數,衰減因子定義為Fn=dn/d1,干擾環路n的 系統參數定義為An=anejφn,干擾環路差異定義為Cn=cnejφn。
文獻[46]認為兩源反向交叉眼干擾是多源反向交叉眼干擾中陣元數為2的特例,其一般性結論同樣適用于多源反向交叉眼干擾。從交叉眼增益GM表達式可以看出,多源反向交叉眼干擾可以配置更多的幅度比an和相位差φn。圖5為四源反向交叉眼干擾與兩源反向交叉眼干擾之間的交叉眼增益對比,其中紅色曲線為兩源反向交叉眼干擾的交叉眼增益曲線。得益于更多的系統自由度,相比兩源反向交叉眼干擾,多源反向交叉眼干擾可以獲得更大的交叉眼增益、更優的干擾性能。
3 交叉眼干擾的裝備發展
3.1 試驗情況

圖5 多源反向交叉眼干擾的交叉眼增益[46]Fig.5 Cross-eye gain of multiple-element retrodirective cross-eye jamming[46]

圖6 意大利ELETTRONIC公司進行的試驗場景Fig.6 Experiments performed by ELETTRONICA
據了解,1988年開始,意大利ELETTRONIC公司Neri等人[57]對交叉眼干擾開展樣機研究,在小型直升機上進行了初步試驗。隨后1993年、1999年以及2000年分別在直升機、艦船、噴氣式飛機等不同平臺開展了多次外場試驗,如圖6所示,并在2000年AOC會議上第1次公開聲明在艦船和直升機等軍事平臺上成功驗證了交叉眼干擾的有效性。
2010年,南非普陀利亞大學[41,58]搭建了交叉眼干擾驗證系統,如圖7所示,開展了暗室試驗和外場試驗,對兩源反向交叉眼干擾的干擾有效性進行了試驗驗證。從暗示試驗結果來看[41],交叉眼干擾驗證系統有效地驗證了文獻[58]關于兩源反向交叉眼干擾的一般性結論。在外場試驗中,當單脈沖測角雷達未進入跟蹤模式時,將其瞄準軸對準干擾機天線中心,如圖7(a)所示。當單脈沖測角雷達轉入跟蹤模式時,其瞄準軸迅速偏離干擾機天線的物理范圍,指向右側位置,如圖7(b)所示。
3.2 現役裝備
干擾理論的不斷深入直接推進了交叉眼干擾的實用化進程。據了解,國外已研制了少量的機載交叉眼干擾系統,包括歐洲臺風戰機的防御支援子系統(Defensive Aids Sub System, DASS)[59]和俄羅斯Su-30MK/34等戰機裝備的“希比內”電子對抗系統[60]。受限于保密原因,國內尚未見交叉眼干擾系統裝備的有關報道。
臺風戰機的DASS系統中的ESM/ECM干擾吊艙安裝在臺風戰機的兩側翼尖上,如圖8(a)所示,可根據實時任務需求提供包括交叉眼干擾在內的多種干擾樣式,為臺風戰機提供了對抗地空、空空導彈的自衛防御能力[59]。
“希比內”電子對抗系統中的SAP-518干擾吊艙同樣掛載在戰機兩側翼尖,如圖8(b)所示。報道稱SAP-518干擾吊艙可為戰機提供單機自衛功能,通過對雷達信號復制、調制、轉發,可導致來襲導彈偏離飛行軌跡[60]。
4 交叉眼干擾的應用難題
從國外交叉眼干擾裝備研制情況來看,兩源反向交叉眼干擾已經走向實用化,多源反向交叉眼干擾處于起步階段。國內交叉眼干擾的裝備研制仍面臨著眾多應用難題有待解決。本節將從干擾天線結構、參數容限、干信比需求、干擾環路差異等4個方面論述交叉眼干擾的應用難題。
4.1 干擾天線結構

圖7 普陀利亞大學的交叉眼干擾驗證系統[58]Fig.7 Cross-eye jamming system of University of Pretoria[58]

圖8 機載交叉眼干擾系統Fig.8 The airborne cross-eye jamming systems
交叉眼干擾的干擾天線結構可分為兩類:非反向天線結構和反向天線結構[32,61,62]。傳統交叉眼干擾通常采用非反向天線結構,如圖9所示,通過2個發射天線發射兩路相位差180°的干擾信號,實現對單脈沖測角雷達的角度欺騙干擾。在靜態條件下,通過保證兩路干擾信號質量,且發射天線對準被干擾雷達時,該天線結構能夠實現交叉眼干擾效果。然而,在實際應用場景中基本不存在靜態條件,由于交叉眼干擾系統通常裝備在飛機、艦船等運動平臺,當機翼振動、船舷搖擺時,兩路干擾信號的傳輸路徑發生變化,無法保證在被干擾雷達天線處以180°相位差合成,因此采用非反向天線結構的交叉眼干擾系統基本無法獲得預期干擾效果。因此,如何實現在動態條件下兩路干擾信號在雷達天線處反相合成是研制交叉眼干擾系統的難題之一。

圖9 非反向天線結構[32]Fig.9 The non-retrodirective antenna configuration[32]

圖10 兩種反向天線結構Fig.10 Two retrodirective antenna configurations
為克服動態平臺的影響,交叉眼干擾應采用反向天線結構,如圖10所示。反向天線于1959年被提出,又稱Van Atta天線[26],通常由成對天線組成。反向天線具有自調相特性,能夠自動補償信號傳輸路徑差引入的相位差。當各天線對的連接線長度相等,則回波信號將按入射波方向“反射”回去,因此又稱為反射器天線陣[27]。反向交叉眼干擾優勢在于:無需獲取雷達天線位置或來波方向,反向天線結構自動將干擾信號按入射方向發射出去,且不受溫度、平臺振動等環境影響。為滿足這一特性,反向交叉眼干擾機內部要求2個傳輸方向的饋線延遲相等、信號處理時間相同。
反向天線結構有單收發天線和收發天線對兩種結構形式,各有優缺點[32]。采用圖10(a)所示的單收發天線形式的交叉眼干擾機,共用同一收發天線、環形器和饋線進行收發信號,優點是具有一致的相位中心,且只有少量非共用的電路元件,易于進行相位、延遲等系統匹配,可以使用較長的饋線進行收發信號,能夠滿足系統對基線長度的要求;缺點是環形器需要較高的隔離度將收發信號進行隔離,當2個環形器的隔離度小于轉發器的增益時,干擾機系統將發生震蕩。采用圖10(b)所示的收發天線對形式的交叉眼干擾機,成對天線分別進行收發信號,優點是不需要環形器將兩路信號分開,通過設計天線隔離度來保證2個方向信號的隔離;缺點是非共用元件增多,給系統匹配帶來難度,且天線相位中心不一致,不滿足天線互易原理,易受多徑效應等環境因素的影響。針對不同的應用環境,交叉眼干擾機應優選適當的反向天線結構。例如針對大型艦船平臺,交叉眼干擾機應采用單收發天線結構,因為較長的共用饋線使得控制相位相對容易,且能克服海面多徑效應的影響。
對于多源反向交叉眼干擾,干擾天線可擴展為線性反向陣列、圓形反向陣列、不規則陣列等多種天線陣列結構。為滿足干擾天線陣列的反向特性,需要多個干擾環路的饋線長度相等[27]。以4陣元線陣為例,如圖11所示,每2個收發天線形成一個干擾環路,天線1和天線4形成干擾環路1,天線2和天線3形成干擾環路2,當饋線長度滿足l1=l2時,陣列天線的回波信號將按入射波方向折返回去。
4.2 系統參數容限
交叉眼干擾系統的參數容限是指為造成單脈沖雷達特定的測角誤差,幅度比、相位差所能容忍的誤差范圍[40,46,63]。為了造成單脈沖雷達跟蹤失鎖,幅度比、相位差應設置在理想條件下,即幅度比相位差φn=180°,此時交叉眼干擾可以產生無窮大的測角誤差[46]。然而,微小的傳播路徑差和環境變化引起的幅相誤差都將引入較大的參數誤差,若超出參數容限,系統將無法達到預期的干擾效果。因此,如何在精確控制幅度比、相位差以保證干擾性能是研制交叉眼干擾系統的難題之二。

圖11 線性反向天線陣列Fig.11 The linear retrodirective array

圖12 兩源反向交叉眼干擾的參數容限分析Fig.12 Tolerance analysis of two-element retrodirective cross-eye jamming
圖13 多源反向交叉眼干擾的參數容限分析[46]Fig.13 Tolerance analysis of multiple-element retrodirective cross-eye jamming[46]
文獻[32,40]分析了兩源反向交叉眼干擾的參數容限,為控制系統參數的誤差精度提供了依據。當雷達載頻為9 GHz、雷達天線波束寬度為 1 0°、干擾基線為10 m,干擾轉角為 30°、干擾距離為1 km時,兩源反向交叉眼干擾對系統參數容限的要求如圖12所示,圖中曲線為交叉眼增益等高線。為了獲得交叉眼增益為7的干擾性能,相位差誤差應控制在 9°以內。然而,對于X波段(9 GHz)雷達導引頭,1 mm的路徑差就會引入 1 0.8°的相位差。可見,對于兩源反向交叉眼干擾,其參數容限要求十分苛刻。
文獻[46]分析了多源反向交叉眼干擾的參數容限,指出更多的系統自由度降低了干擾系統對參數容限的要求。對于特定的交叉眼增益,多源反向交叉眼干擾的系統參數可以在更大的范圍內取值,即放寬了參數容限要求。圖13給出了典型條件下基于4陣元線性反向陣列的多源反向交叉眼干擾的參數容限要求。為了獲得交叉眼增益為7的干擾性能,相位差誤差應控制在1 6°以內。可見,相比兩源反向交叉眼干擾,多源反向交叉眼干擾的參數容限要求更加寬松。
4.3 干信比需求
有效的交叉眼干擾需要較高的干信比,這是由其自身特點所決定的:幅度近似相等、相位差180°的兩路或多路干擾信號在單脈沖雷達的和通道中相互抵消,致使和通道中干擾信號功率很低。因此,如何在干擾信號近似對消條件下提供有效的干擾功率以對抗平臺強反射回波是研制交叉眼干擾系統的難題之三。
電子戰專著文獻[3-5]指出交叉眼干擾至少需要20 dB以上的干信比才能有效。盡管這一結論并沒有嚴格的數學理論依據,卻被電子戰領域同行廣泛認同。為此,文獻[42,43]分析了兩源反向交叉眼干擾的干信比需求,假設搭載平臺是位于干擾收發天線之間的點目標,并將干擾信號與平臺發射回波在和、差通道內分別進行相加,得到總的和、差通道回波。文獻[42]指出考慮平臺反射回波后,交叉眼增益不再為固定值,而是隨平臺回波相位變化的隨機分布,并以交叉眼增益分布的中值進行性能分析。從兩源反向交叉眼干擾的干信比分析結果來看,如圖14所示,20 dB的干信比對交叉眼干擾是合理的,此時交叉眼增益中值大于2。然而,20 dB的干信比又略顯保守,只要11.4 dB的干信比即可使交叉眼增益中值大于1,此時單脈沖雷達受干擾后指向平臺之外的角度上[42]。
多源線陣反向交叉眼干擾的多自由度優勢可以降低干擾系統對干信比的需求。文獻[46,48]研究了多源線陣反向交叉眼干擾的干信比需求,推導了多源線陣反向交叉眼干擾的干信比定義,通過仿真結果驗證了上述結論[46,48]。以四源線陣為例,圖15給出了典型條件下多源反向交叉眼干擾的干信比需求。為了使交叉眼增益中值大于1,在適當的系統參數條件下,干信比只需滿足4.55 dB即可。
文獻[42,48]是基于交叉眼增益中值開展干擾系統對干信比的需求分析。在考慮交叉眼增益的極限值時,文獻[64]指出20 dB的干信比取值并不理想,此時可能會引起干擾性能發生劇烈變化。在考慮交叉眼增益整個分布的基礎上,為獲得穩定的干擾性能,多源反向交叉眼干擾的干信比取值應在30 dB附近。
為了能夠有效對抗平臺反射回波,滿足干擾性能對干信比的需求,交叉眼干擾對天線有效輻射功率提出了更高的要求,增加了干擾的應用難度。一種解決方案是將交叉眼干擾與距離波門拖引干擾組合使用,通過距離波門拖引干擾將波門拖離平臺距離單元,以較小的干信比實施交叉眼干擾,可以獲得距離-角度二維聯合欺騙干擾效果[30]。
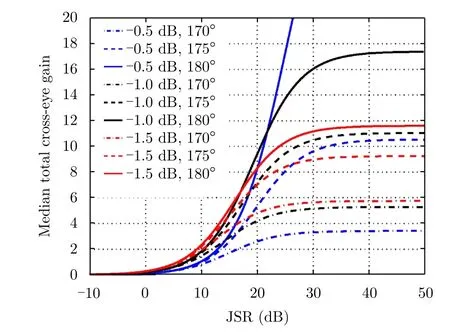
圖14 兩源反向交叉眼干擾的交叉眼增益中值與干信比的關系[42]Fig.14 Relationship between the median cross-eye gain and JSR for two-element retrodirective cross-eye jamming[42]
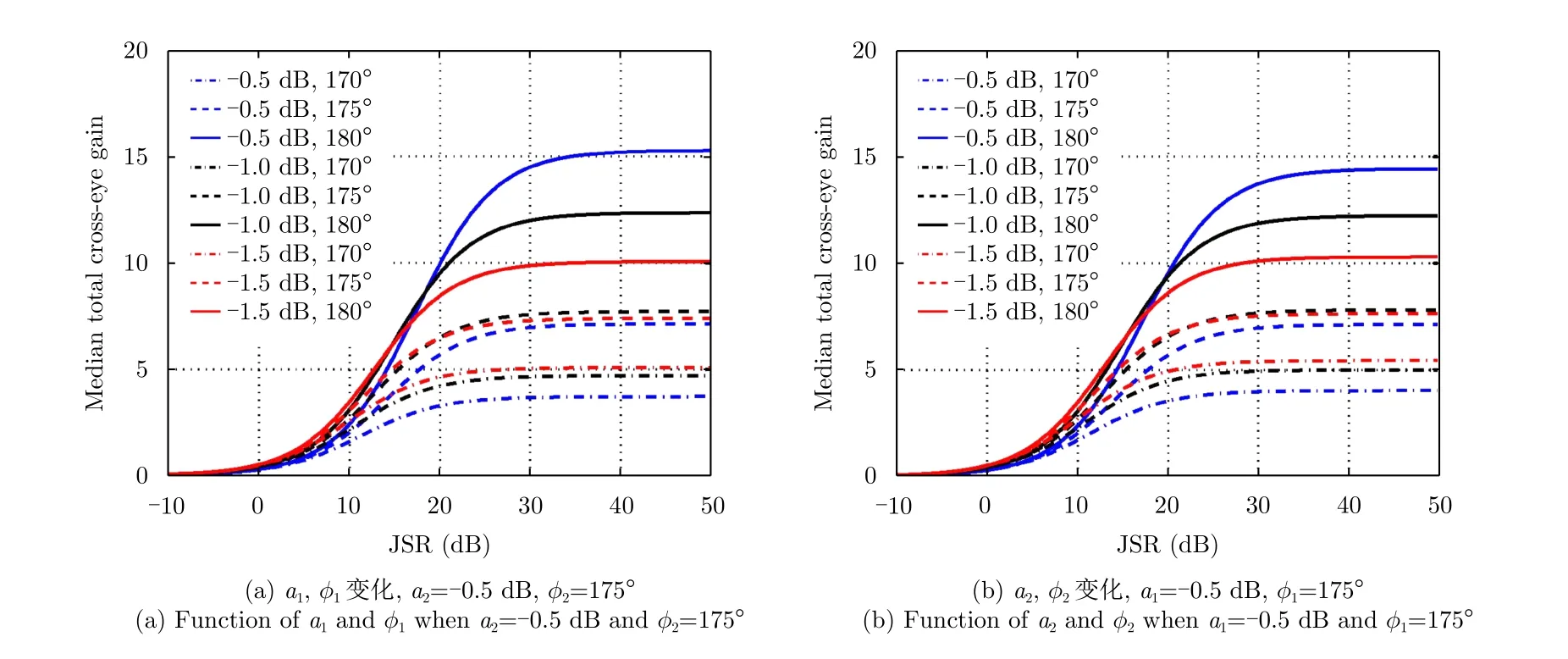
圖15 多源反向交叉眼干擾的交叉眼增益中值與干信比的關系[46]Fig.15 Relationship between the median cross-eye gain and JSR for multiple-element retrodirective cross-eye jamming[46]
4.4 干擾環路差異
多源反向交叉眼干擾在具有參數容限和干信比優勢的同時,也有存在干擾環路差異的缺點[46,54-56]。干擾環路差異是指多個干擾環路之間的幅相差異,主要是由器件差異、干擾路徑差等因素引起的。器件差異是由硬件不一致造成的,屬于固定差異,可通過精確測量校準實現精確補償。天線極化失配引入額外相位差可被歸類于天線器件差異[65,66]。干擾路徑差是由干擾系統設計、干擾場景引起的,隨著干擾場景變化而變化,屬于動態誤差,需通過動態校準方法實現差異的減小或補償。文獻[54]指出干擾環路差異嚴重影響了多源反向交叉眼干擾的干擾性能,當引入180°相位差時,干擾機將成為信標機。因此,如何精確補償多個干擾環路之間的差異是研制多源/多環路反向交叉眼干擾系統的難題之四。
文獻[46]分析了當干擾環路差異無法精確補償時,參數容限和干信比需求等干擾性能將發生嚴重惡化。以四源反向交叉眼干擾為例,當2個干擾環路之間存在相位差異Δ φ=180°,幅度差異c2/c1=- 0.5 dB時,參數容限性能將急劇惡化,如圖16(a)所示;即使增加干信比,干擾系統也無法獲取較大的總交叉眼增益中值,如圖16(b)所示。
文獻[55]對干擾環路差異中的干擾路徑差進行了研究,干擾場景如圖4(b)所示,以兩環路反向交叉眼干擾為例,推導了2個干擾環路之間的干擾路徑差rΔ,即

其中,rn為干擾環路n相距雷達的干擾距離,dn為干擾環路n的基線長度,θcn為干擾環路n的相對雷達的轉角。文獻[56]從靜態補償和動態補償2個角度分析干擾路徑差補償問題,對于低頻段雷達或特定靜態干擾場景,可以實施靜態補償;而對于高頻段雷達和動態干擾場景,需進行動態補償。動態干擾場景下,為實現對干擾路徑差的動態補償,需要獲得雷達目標的距離和角度信息,并依賴于外部測距、測角系統。
多源反向交叉眼干擾存在干擾環路差異的應用限制,結合雷達告警系統可實現對干擾環路差異的動態精確補償。因此,綜合考慮其干擾性能優越性,多源反向交叉眼干擾仍具有可觀的實用性。
5 交叉眼干擾的研究趨勢
盡管交叉眼干擾早在20世紀50年代就被提出,但直到數字射頻存儲器DRFM、反向天線結構的出現和廣泛應用,交叉眼干擾才迎來了新的發展生機。為了對交叉眼干擾研究提供有益的參考,填補目前國內外在交叉眼干擾研究方面的空白,可開展以下4點研究內容:
(1)交叉眼干擾系統幅度、相位高精度控制技術。幅度、相位的高精度控制直接決定了干擾性能的優劣。隨著被干擾雷達的載頻走向高頻,幅相的精確控制顯得尤為重要。此時,無論是兩源反向交叉眼干擾還是多源反向交叉眼干擾,若無法精確控制系統參數,都難以獲得良好的干擾效果。同時,考慮到雷達導引頭的殺傷半徑,最優的干擾效果是使雷達導引頭失鎖,這就要求幅度控制精度在0.5 dB、相位控制精度在1°量級。該問題偏于工程化,需要從多比特量化的DRFM、發射接收可控的全固態相控陣天線、干擾環路的反向特性校準等方面綜合考慮。
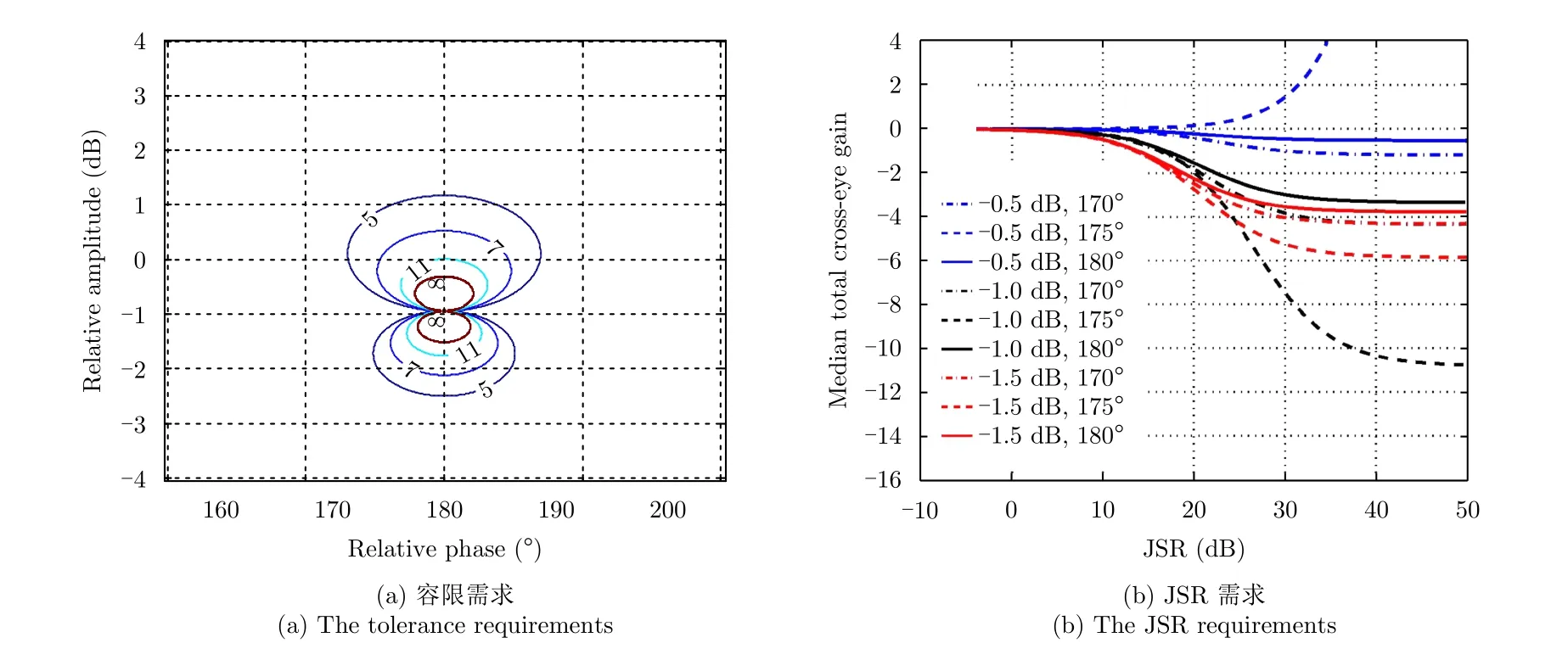
圖16 干擾環路差對多源反向交叉眼干擾造成的性能惡化[46]Fig.16 The performance deterioration of multiple-element retrodirective cross-eye jamming resulted by jamming loop differences[46]
(2)大尺寸平臺條件下干擾基線長度優化選擇方法。將交叉眼干擾應用于艦船等大尺寸平臺時,干擾基線長度選擇會對干擾效果產生影響。若干擾天線沿船首船尾布置,長基線將使得干擾信號存在傳輸延時,進而導致艦船回波與干擾信號可被雷達從距離上分開,實現干擾剔除;若干擾天線局部布置,短基線造成的測角誤差偏小,反艦導彈仍能夠打擊艦船平臺而起不到自衛防護作用。可結合威脅雷達參數,分析多源反向交叉眼干擾的最佳干擾基線長度;或者研究多短基線的多環路反向交叉眼干擾,通過多個短基線干擾環路共同使用,克服長基線干擾可被分辨而單短基線性能不足的難題。
(3)交叉眼干擾寬帶建模與性能分析。寬帶單脈沖測角技術已趨于成熟。在寬帶條件下,雷達目標為多散射點模型,其散射特性是由多個散射點合成得到的。當假設目標為點目標的前提條件不再成立時,平臺寬帶反射回波條件下的干擾性能將會發生變化。應建立多散射點模型下的交叉眼干擾數學模型,分析干擾性能以及干信比需求變化。
(4)距離角度二維聯合欺騙干擾技術。傳統的有源假目標欺騙干擾機通過延時轉發可以產生距離維度上的距離假目標。多個距離假目標通常具有單一的角度信息,即使假目標能夠逼真地模擬真實目標的目標特性信息,雷達仍能夠從角度維度上將真目標和距離假目標進行區分、識別。考慮到交叉眼干擾可以產生角度維度上的視在假目標,如何形成在距離-角度維度上的二維假目標,造成雷達在檢測階段無法區分真假目標,將具有十分重要的理論和應用價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
